pcl之滤波器(一)

pcl滤波器
pcl一共是有十二个主要模块,详细了解可以查看官网。https://pcl.readthedocs.io/projects/tutorials/en/latest/#basic-usage
今天学习一下pcl的滤波器模块。
滤波器模块,官网一共是提供了6个例程,今天先来看第一第二个。
直通滤波器
主要使用的API是 passthrough
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/passthrough.h>int
main()
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);// Fill in the cloud datacloud->width = 50; //点数量cloud->height = 1; cloud->points.resize(cloud->width * cloud->height);//遍历点赋值,值为0-1024之间的随机浮点值for (auto& point : *cloud){point.x = 1024 * rand() / (RAND_MAX + 1.0f);point.y = 1024 * rand() / (RAND_MAX + 1.0f);point.z = 1024 * rand() / (RAND_MAX + 1.0f);}std::cerr << "Cloud before filtering: " << std::endl;for (const auto& point : *cloud)std::cerr << " " << point.x << " "<< point.y << " "<< point.z << std::endl;// Create the filtering objectpcl::PassThrough<pcl::PointXYZ> pass;pass.setInputCloud(cloud);pass.setFilterFieldName("z"); //设置z为过滤因子pass.setFilterLimits(0.0, 200.0); //只通过z轴值为0-200之间的点pass.filter(*cloud_filtered);std::cerr << "Cloud after filtering: " << std::endl;for (const auto& point : *cloud_filtered)std::cerr << " " << point.x << " "<< point.y << " "<< point.z << std::endl;system("pause");return (0);
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)project(passthrough)find_package(PCL 1.2 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable (passthrough passthrough.cpp)
target_link_libraries (passthrough ${PCL_LIBRARIES})
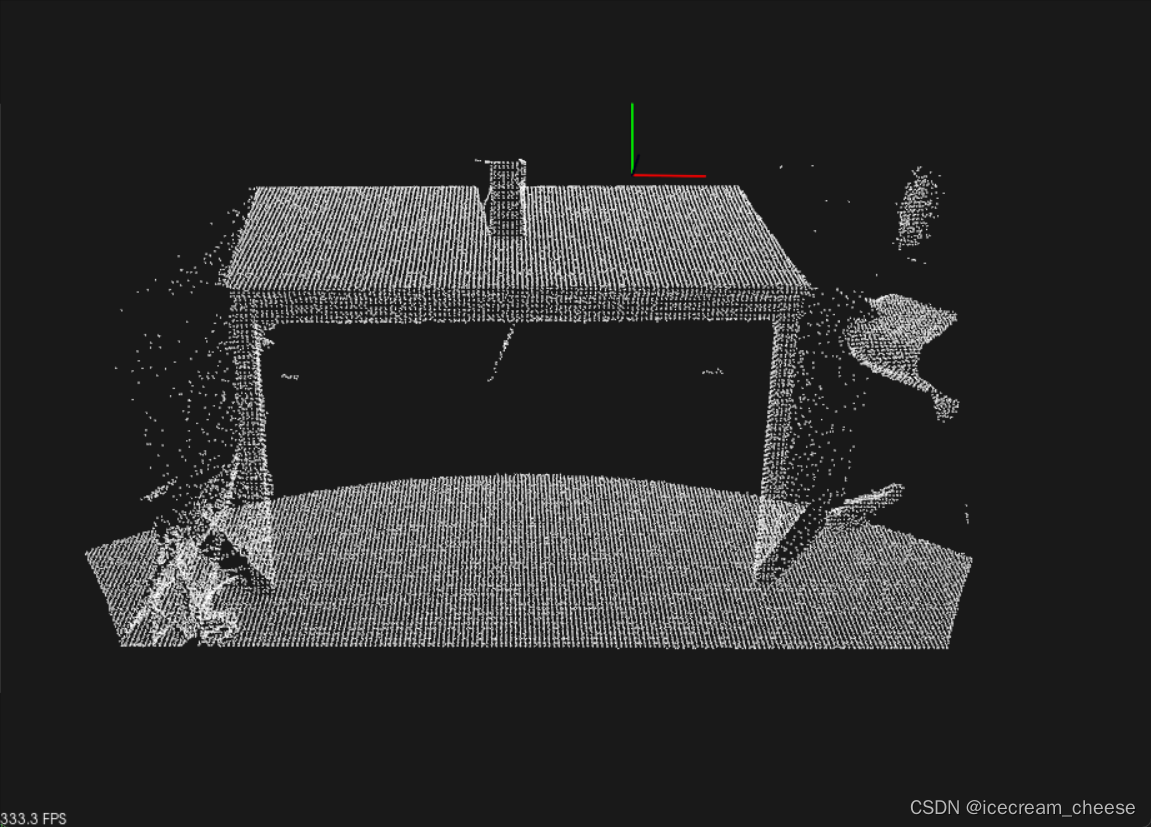
体素滤波器降采样
即使用体素化网格方法,减少一个点云数据集中点的数量。
VoxelGrid 类在输入点云数据上创建一个3D体素网格(将体素网格想象为空间中的一组微小的3D盒子)。然后,在每个体素(即3D框)中,所有存在的点都将用它们的质心进行近似(即下采样)。这种方法比用体素的中心逼近它们要慢一些,但它更准确地表示底层表面。
感兴趣的可以去看看YouTube上的这个视频
https://youtu.be/YHR6_OIxtFI?t=24
程序中使用的pcd文件地址
https://raw.github.com/PointCloudLibrary/data/master/tutorials/table_scene_lms400.pcd
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>int
main ()
{pcl::PCLPointCloud2::Ptr cloud (new pcl::PCLPointCloud2 ());pcl::PCLPointCloud2::Ptr cloud_filtered (new pcl::PCLPointCloud2 ());// Fill in the cloud datapcl::PCDReader reader;// Replace the path below with the path where you saved your filereader.read ("table_scene_lms400.pcd", *cloud); // Remember to download the file first!std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height << " data points (" << pcl::getFieldsList (*cloud) << ")." << std::endl;//创建一个voxel叶大小为1cm的pcl::VoxelGrid滤波器,pcl::VoxelGrid<pcl::PCLPointCloud2> sor; //创建滤波对象sor.setInputCloud (cloud); //设置需要过滤的点云给滤波对象sor.setLeafSize (0.01f, 0.01f, 0.01f); //设置滤波时创建的体素体积为1cm的立方体sor.filter (*cloud_filtered); //执行滤波处理,存储输出std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points (" << pcl::getFieldsList (*cloud_filtered) << ")." << std::endl;pcl::PCDWriter writer;writer.write ("table_scene_lms400_downsampled.pcd", *cloud_filtered, Eigen::Vector4f::Zero (), Eigen::Quaternionf::Identity (), false);return (0);
}
代码还是比较简单的,先看一下结果吧

点少了十倍。
视觉效果大致如下
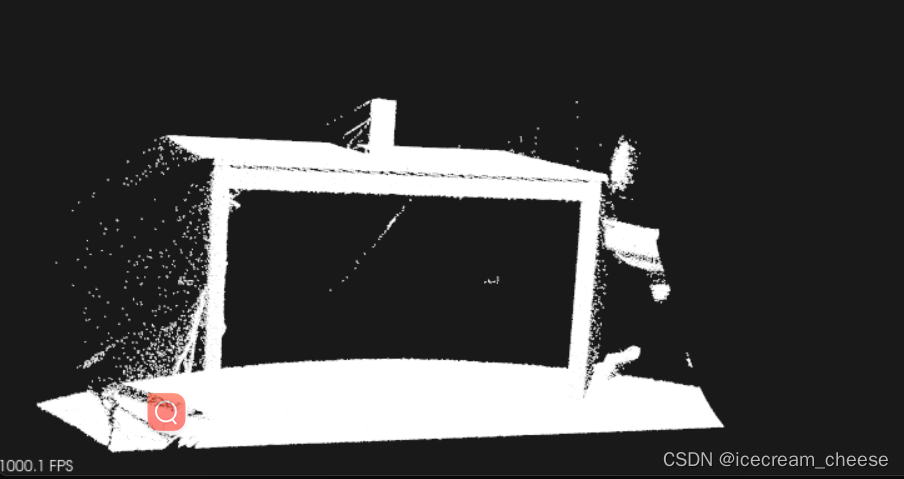
放大看效果比较明显一点
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)project(voxel_grid)find_package(PCL 1.2 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable (voxel_grid voxel_grid.cpp)
target_link_libraries (voxel_grid ${PCL_LIBRARIES})
相关文章:
pcl之滤波器(一)
pcl滤波器 pcl一共是有十二个主要模块,详细了解可以查看官网。https://pcl.readthedocs.io/projects/tutorials/en/latest/#basic-usage 今天学习一下pcl的滤波器模块。 滤波器模块,官网一共是提供了6个例程,今天先来看第一第二个。 直通…...
)
java项目性能优化(MyBatis中开启查询缓存及flushCache与useCache的使用)
在java项目中,如果需要大量的DB查询,导致缓存过多,项目运行缓慢,可以设置在select查询时,添加二级缓存的清空。 如果没有去配置flushCache、useCache,那么默认是启用缓存的。 1,flushCache默认…...

Unity3D控制人物移动的多种方法
系列文章目录 unity知识点 文章目录 系列文章目录前言一、人物移动之键盘移动1-1、代码如下1-2、效果 二、人物移动之跟随鼠标点击移动2-1、代码如下2-2、效果 三、人物移动之刚体移动3-1、代码如下3-2、效果 四、人物移动之第一人称控制器移动4-1、代码如下4-2、效果 五、And…...

无人机打击激光器
激光器的应用非常广泛,涵盖了多个领域。以下是一些主要的激光器应用: 医疗领域:激光器在医疗行业中有着重要应用,比如用于激光手术(如眼科手术)、皮肤治疗、牙科治疗、肿瘤治疗等。 工业制造:在…...
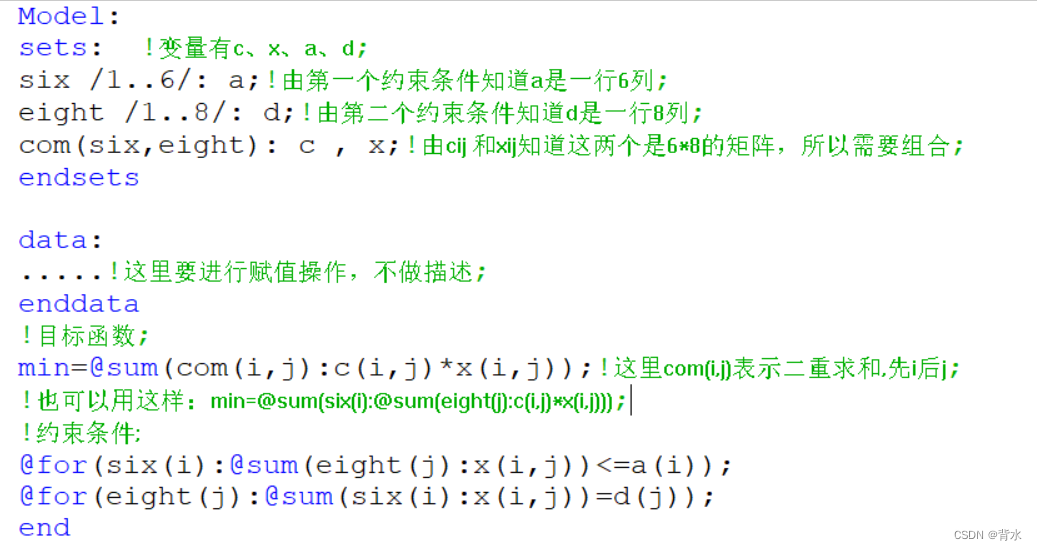
Lingo数学建模基础
1.基本运算符 1.1算数运算符 1.2逻辑运算 #not# 否定操作数的逻辑值,一元运算符 #eq# 若两运算数相等,则为true,否则为false #ne# 若两运算数不相等,则为true,否则为false #gt# 若左边运算数严格大于右边,则为true,否则为…...
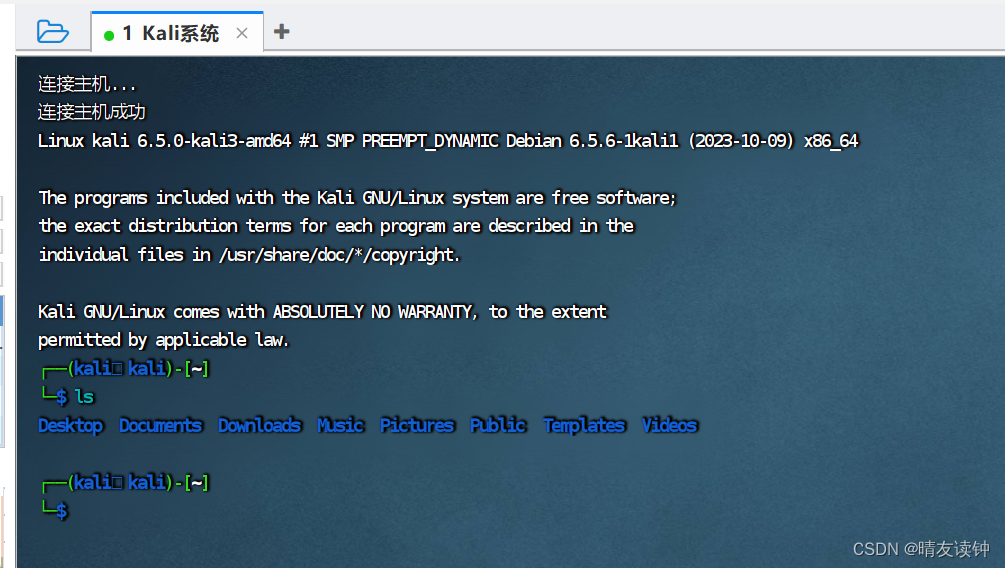
finalshell连接linux的kali系统
kali的ssh服务似乎是默认关闭的,笔者在玩CentOS系统时可以直接用finalshell完成连接,但kali不行,需要先手动开启ssh服务。 开启kali的ssh服务 输入【ssh start】命令开启ssh服务,可以用【ssh status】命令查看ssh状态,…...

2、Line Charts折线图
可视化时间趋势 现在你已经熟悉了编码环境,是时候学习如何制作自己的图表了! 在本教程中,您将学习足够的Python来创建专业外观的折线图。然后,在接下来的练习中,您将使用您的最新技能处理真实世界的数据集。 本课程数据集夸克网盘下载链接:https://pan.quark.cn/s/a235ac…...
)
shell脚本获得所有数据库备份(整库备份,表级备份)
数据库备份到天翼云对象存储OBS https://blog.csdn.net/qq_34631220/article/details/135755894 1、获得所有数据库 #!/bin/sh HOSTNAME"ip" #数据库信息 PORT"3306" USERNAME"root" PASSWORD"" DBNAME"yusuan" #数据库…...
REVIT二次开发万能刷
将这两个参数赋予其他参数 步骤2 将来做个可以调控的版本 using System; using System.Collections.Generic; using System.Lin...
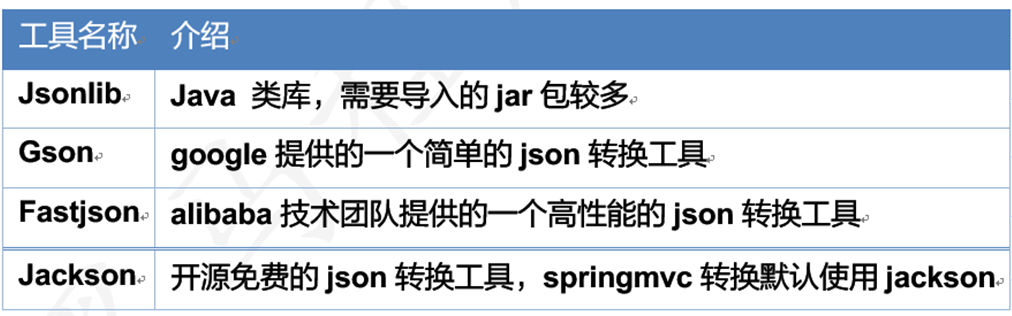
JSON简单了解
文章目录 1、JSON介绍2、ES6模版字符串3、JS对象转化为JSON字符串3.1、手动JS对象转化为JSON字符串3.2、自动JS对象转化为JSON字符串 4、JS对象和java互相转换 1、JSON介绍 JSON 概念:JavaScript Object Notation。JavaScript 对象表示法,简单理解JSON是…...
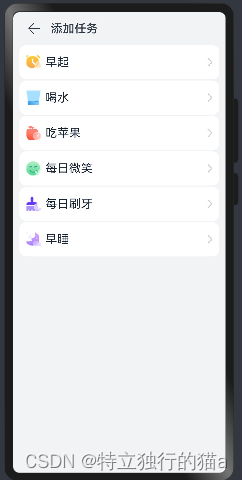
HarmonyOS鸿蒙应用开发( 四、重磅组件List列表组件使用详解)
List列表组件,是一个非常常用的组件。可以说在一个应用中,它的身影无处不在。它包含一系列相同宽度的列表项,适合连续、多行呈现同类数据,如商品列表、图片列表和和文本列表等。ArkUI 框架采用 List 容器组件创建列表(…...
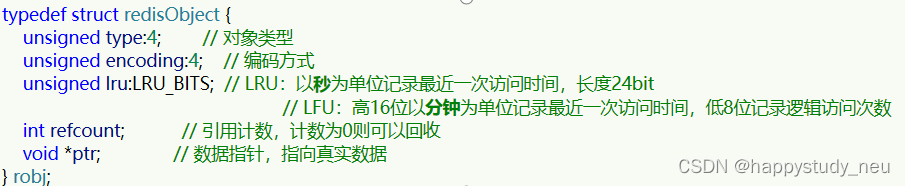
redis优化系列(六)
本期分享redis内存过期策略:过期key的处理 Redis之所以性能强,最主要的原因就是基于内存存储。然而单节点的Redis其内存大小不宜过大,会影响持久化或主从同步性能。 可以通过修改配置文件来设置Redis的最大内存: maxmemory 1gb …...

【 Qt 快速上手】-②- Qt 环境搭建
文章目录 1. Qt 开发工具概述1.1 Qt Creator 介绍1.2 Visual Studio 介绍1.3 Eclipse 介绍 2. Qt SDK 的下载与安装2.1 Qt SDK 的下载2.2 Qt SDK 的安装2.3 验证 Qt SDK 安装是否成功2.4 Qt 环境变量配置 1. Qt 开发工具概述 Qt 开发环境需要安装三个部分: C编译器…...
)
Java入门高频考查基础知识4(字节跳动面试题18题2.5万字参考答案)
Java 是一种广泛使用的面向对象编程语言,在软件开发领域有着重要的地位。Java 提供了丰富的库和强大的特性,适用于多种应用场景,包括企业应用、移动应用、嵌入式系统等。 以下是几个面试技巧: 1. 复习核心概念:回顾 Ja…...

视觉空间效应
一、视觉空间效应 概况 视觉空间效应,是人类视觉系统(Human Visual System,HVS)的一个特点,也称为"视觉距离效应"。即距离观察者更近的目标像素对颜色感知产生更强烈的影响,而距离较远的目标像素…...
C#,入门教程(07)——软件项目的源文件与目录结构
上一篇: C#,入门教程(06)——解决方案资源管理器,代码文件与文件夹的管理工具https://blog.csdn.net/beijinghorn/article/details/124895033 创建新的 C# 项目后, Visual Studio 会自动创建一系列的目录与文件。 程序员后面的工…...
)
三国游戏(第十四届蓝桥杯)
题目 小蓝正在玩一款游戏。游戏中魏蜀吴三个国家各自拥有一定数量的士兵 X,Y,Z(一开始可以认为都为 0)。 游戏有 n个可能会发生的事件,每个事件之间相互独立且最多只会发生一次,当第 i个事件发生时会分别让 X,Y,Z 增加 A i , B…...
k8s---包管理器helm
内容预知 目录 内容预知 helm相关知识 Helm的简介与了解 helm的三个重要概念 helm的安装和使用 将软件包拖入master01上 使用 helm 安装 Chart 对chart的基本使用 查看chart信息 安装chart 对chart的基本管理 helm自定义模板 在镜像仓库中拉取chart,查…...
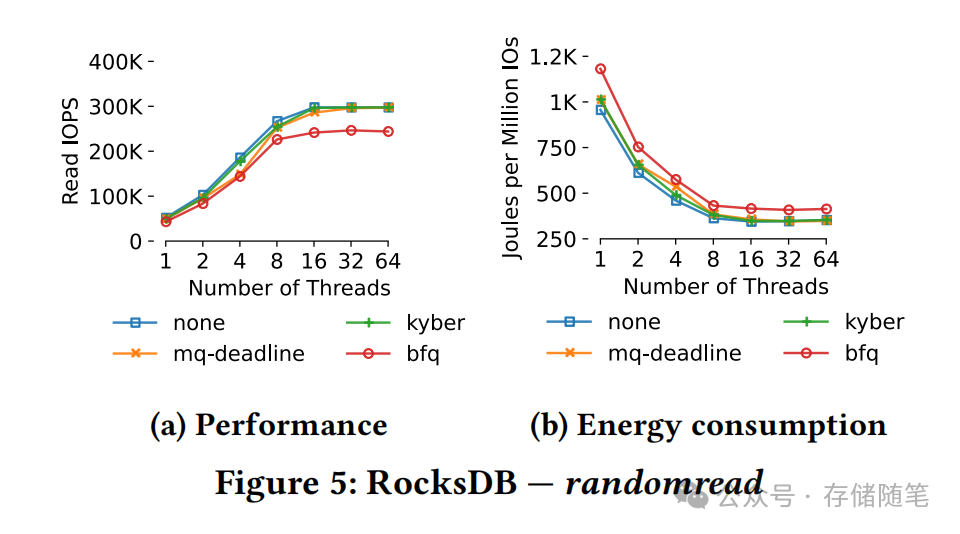
对于超低延迟SSD,IO调度器已经过时了吗?-part2
为了进行这项研究,他们设计了一套严谨的实验方法论,包括在配备了高速Intel Optane P4801X Series NVMe SSD的服务器上执行一系列微观和宏观基准测试,同时监测系统能耗情况。这些测试涵盖了多种工作负载场景,从单一进程提交大量请求…...

【C++】list的使用
目录 1 构造1.1 无参构造1.2 构造的list中包含n个值为val的元素1.3 用[first, last)区间中的元素构造list1.4 拷贝构造 2 迭代器的使用2.1 begin end2.2 rbegin rend 3 容量操作3.1 empty size 4 获取元素4.1 front back 5 插入、删除、修改5.1 头插-push_front和尾插-push…...

解锁GitHub极速体验:智能加速插件深度解析
解锁GitHub极速体验:智能加速插件深度解析 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub GitHub加速插件(…...

【避坑指南】VSCode+EIDE+Keil混合开发环境:从零搭建到项目无缝迁移
1. 为什么需要VSCodeEIDEKeil混合开发环境? 作为一名嵌入式开发者,我深知Keil这个老牌IDE在开发效率上的痛点:代码补全弱、界面老旧、多窗口管理混乱。但直接完全迁移到VSCode又面临工程兼容性问题,特别是对传统AC5编译器的支持。…...

CircuitPython Web Workflow实战:无线开发Yoto Mini与I2C硬件验证
1. 项目概述与核心价值如果你玩过像树莓派Pico或者ESP32这类微控制器,肯定对“插拔-编程-调试”这个循环不陌生。每次改几行代码,就得拔下USB线,重新上电,然后盯着串口监视器看输出。这个过程在项目初期调试硬件时,尤其…...

三维重建实时映射技术在智慧水利中的核心应用
三维重建实时映射技术在智慧水利中的核心应用在国家大力推进数字孪生水利建设、实现水安全精准保障的背景下,智慧水利已从传统监测、调度向全域感知、智能预判、协同处置、一屏统管升级。智慧水利的核心目标,是实现对江河湖库、灌区、泵站、堤坝、闸站等…...

CircuitPython开发进阶:从库文档解读到内存优化与异步编程实战
1. 从“能用”到“精通”:为什么你需要深入理解CircuitPython库文档刚接触CircuitPython时,我们往往是从复制粘贴示例代码开始的。这没什么问题,快速让一个LED闪烁起来,或者让传感器读出数据,那种即时反馈的成就感是驱…...

嵌入式测试学习第 12天:串口基础概念:UART、波特率、数据位、校验位
串口基础概念:UART、波特率、数据位、校验位一、串口整体基础概念1、什么是UART串口2、串口实物真实图片① 主板/开发板排针串口② USB转TTL串口模块③ 老式DB9工业串口公头母头二、串口四大核心参数1、波特率概念常用标准固定值通俗理解测试场景2、数据位概念作用3…...

AI智能体操作安卓设备:基于agent-droid-bridge的自动化实践
1. 项目概述:连接AI与安卓设备的桥梁 最近在折腾AI智能体(Agent)和自动化流程时,遇到了一个挺有意思的需求:如何让运行在服务器上的AI程序,直接去操作一台真实的安卓手机或模拟器,完成一些复杂的…...

WarcraftHelper:魔兽争霸3终极增强插件5分钟快速上手指南
WarcraftHelper:魔兽争霸3终极增强插件5分钟快速上手指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专为魔兽争…...
)
旁遮普语内容出海迫在眉睫!ElevenLabs+AWS Polly双引擎容灾方案(含Failover切换SLA 99.99%保障协议模板)
更多请点击: https://intelliparadigm.com 第一章:旁遮普语内容出海的战略紧迫性与本地化语音缺口 旁遮普语是全球使用人数超1.2亿的语言,主要分布在印度旁遮普邦、巴基斯坦旁遮普省及庞大的海外侨民社群(如加拿大、英国、美国&…...

开源无人机任务控制系统:微服务架构与自主飞行开发实战
1. 项目概述:一个开源的无人机任务控制系统如果你和我一样,玩过一段时间无人机,从最初的“一键起飞”到后来想实现一些自动化的航线飞行,你可能会发现,市面上成熟的任务规划软件(比如DJI的Pilot 2或一些地面…...