[神经网络]Swin Transformer网络
一、概述
Swin Transformer是一个用了移动窗口的层级式Vision Transformer。
在图像领域,Transformer需要解决如下两个问题:
①尺度问题:同一语义的物体在图像中有不一样的尺度。(大小不同)
②Resolution过大:若以像素点作为单位,则会出现序列过长的情况。
由于使用了移动窗口,Swin Transformer的自注意力仅在窗口中计算,降低了计算量;同时移动窗口的应用还带来了图像之间的层级关系,使得其能更好的应用在图像领域。
二、重要操作
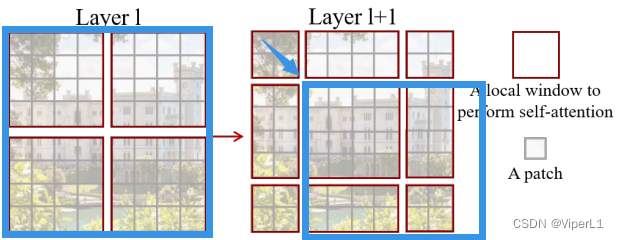
1.移动窗口
对于视觉任务而言,多尺度特征极为重要。例如对于目标检测而言,常用的方法是提取不同尺度的特征后进行特征融合(FPN),这样可以很好的把握物体不同尺寸的特征。而对于语义分割而言,也需要对多尺寸特征进行处理。(skip connection/空洞卷积等)
patch:最小的计算单元
window:原文中默认有 7x7(合计49个)个patch
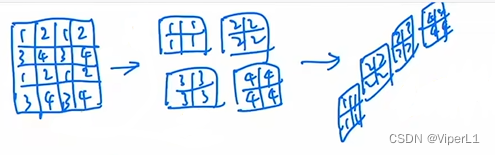
Shift操作:将原来的Window往右下移动2个patch,再沿着原window的延长线对图进行分割。可以使得一个窗口中的自注意力机制注意到其他patch中的信息。
Masked掩码:
窗口移动后,由于窗口大小不一致无法直接merging,通常的操作是将小patch进行padding补至与中间大patch一致。但是这样会提升计算复杂度。
而Masked是在窗口移动后再进行一次循环移位(cyclic shift);
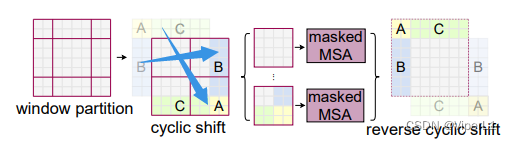
组合后的窗口由于发生了patch移动导致除左上角的patch保持原有位置信息之外全部混入和其他位置的patch;针对这种情况。在对其进行自注意力运算,然后对运算后的结果中不是原始组合的部分按照特定的遮罩进行求和(用来屏蔽错误的组合),如下图所示。
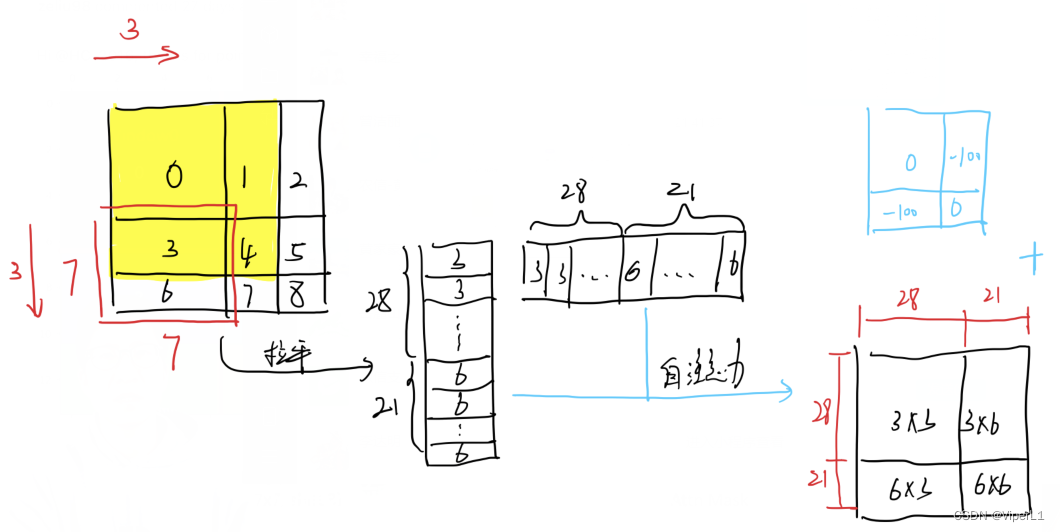
遮罩模板如下:

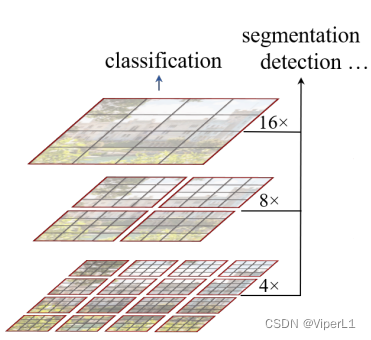
2.patch merging
用于生成多尺寸特征,类似于CNN中的Pooling(池化)。具体做法是将相邻的小patch合并成一个大patch。
三.模型架构

①Patch Partition:在图上划分patch(原文为4x4,对于标准的224*224*3的图片而言,经过此操作后尺寸变为56*56*48)
②Linear Embeding:将向量的维度转换为预先设定好的值;原文设置了一个超参数c=96(操作后尺寸变为96*96*96,前面的96*96将被拉直成3136成为序列长度,最后一个96编程每个token的维度;由于96*96拉直后一共3136对于Transformer太长了,所以采用基于窗口的自注意力,默认每个窗口仅有7x7=49个patch)
③Swin Transformer Block:每组做两次多头自注意力:①基于窗口的多头自注意力;②基于移动窗口的多头自注意力。这样做可以实现窗口与窗口之间的通信。

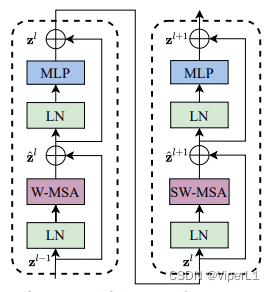
④Patch Merging:Transformer若不进行限制的话,输入和输出尺度并不会发生改变。如果想像CNN一样得到多尺度特征的话就必须使用Patch Merging。具体做法是将相邻的小patch合并成一个大patch(以原文为了例下采样数为2倍,采用跳步式合并--每隔一个点采集一个);
但是经过Merging后,通道数会变为4c,为了和CNN每卷积一次通道数仅x2,在进行Merging后再进行一个1x1卷积将通道数调整为2c。(空间大小/2,通道数x2)
相关文章:
[神经网络]Swin Transformer网络
一、概述 Swin Transformer是一个用了移动窗口的层级式Vision Transformer。 在图像领域,Transformer需要解决如下两个问题: ①尺度问题:同一语义的物体在图像中有不一样的尺度。(大小不同) ②Resolution过大:若以像素点作为单位&…...
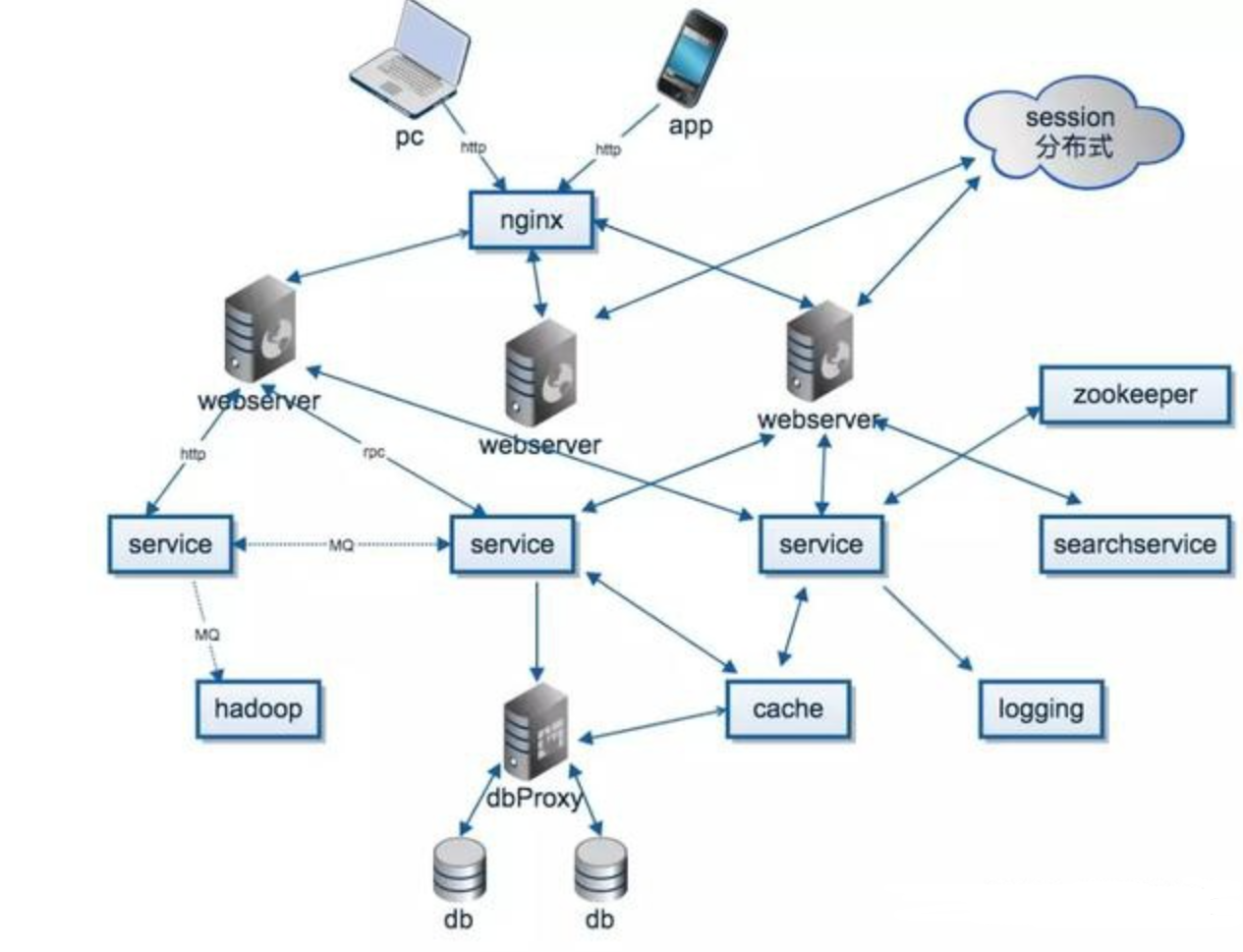
【分布式】什么是分布式,分布式和集群的区别又是什么?答案在正文。
文章目录1. 什么是分布式 ?2. 分布式与集群的区别 ?3.用一个请求串起来4.一个简化的架构图5.分布式环境的特点6.分布式环境下面临的问题7.总结1. 什么是分布式 ? 分布式系统一定是由多个节点组成的系统。 其中,节点指的是计算机服务器,而且这些节点一…...

MyBatis框架的入门案例
MyBatis框架的入门案例 资源地址:https://download.csdn.net/download/weixin_41957626/87531373 1.MyBatis的配置 环境:基于maven的结构 1.1目录结构 1.2依赖包 <dependencies><!--mybatis--><dependency><groupId>org.mybatis…...
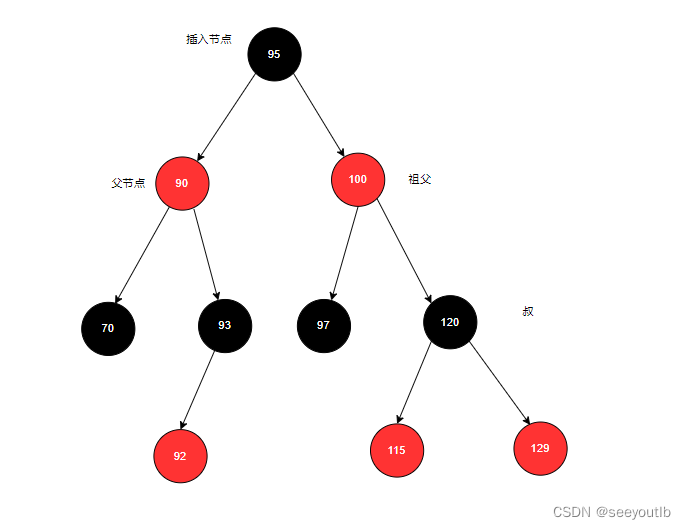
红黑树-随记
文章目录1.为什么hashmap用红黑树不用二叉树和平衡二叉树1.1 二叉树(Binary Search Tree)1.2 红黑树(Red Black Tree)1.3 平衡二叉树(Balence Binary Tree)也称AVT2.为什么mysql用b数,不用B数或…...
Python异常处理更新,正常和不正常的都在这里
嗨害大家好鸭!我是小熊猫~ 异常处理篇嗨害大家好鸭!我是小熊猫~Python标准异常💨什么是异常?不正常异常处理💨使用except而不带任何异常类型使用except而带多种异常类型try-finally 语句异常的参数触发异常用户自定义异…...
[数据结构]:10-二叉排序树(无头结点)(C语言实现)
目录 前言 已完成内容 二叉排序树实现 01-开发环境 02-文件布局 03-代码 01-主函数 02-头文件 03-BinarySearchTreeCommon.cpp 04-BinarySearchTreeFunction.cpp 结语 前言 此专栏包含408考研数据结构全部内容,除其中使用到C引用外,全为C语言…...

openstack浅析
** OpenStack是一个由多个组件组成的开源云计算平台,每个组件都有不同的功能和用途。 ** 组件构成 以下是OpenStack中一些常见的组件及其功能: Nova:用于管理虚拟机的组件,提供了虚拟机的创建、销毁、管理等功能。 Neutron&am…...

华为OD机试Golang解题 - 特异性双端队列 | 含思路
华为Od必看系列 华为OD机试 全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典文章目录 华为Od必看系列使用说明本期题目…...
代码随想录中:回溯算法的基础
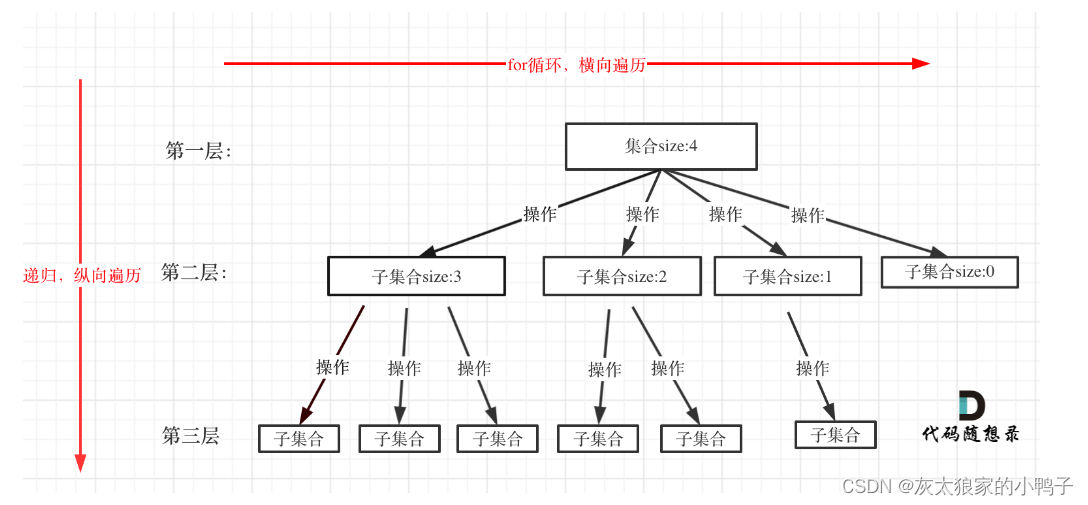
回溯算法是一种暴力的搜索方式;回溯法一般与递归同时存在。 回溯法,一般可以解决如下几种问题: 组合问题:N个数里面按一定规则找出k个数的集合切割问题:一个字符串按一定规则有几种切割方式子集问题:一个…...
Jetpack系列之LiveData)
Android kotlin 系列讲解(进阶篇)Jetpack系列之LiveData
<<返回总目录 文章目录 一、LiveData是什么二、LiveData测试一、LiveData是什么 LiveData是Jetpack提供的一种响应式编程组件,它可以包括任何类型的数据,并在数据发生变化的时候通知给观察者。LiveData特别适合与ViewModel结合在一起使用,虽然它也可以单独在别的地方…...

如何判断有向无环图:构造有向无环图
拓扑序列:可以用来判断一个有向图是否有环! 拓扑排序可以判断有向图是否存在环。我们可以对任意有向图执行上述过程,在完成后检查A序列的长度。 若A序列的长度小于图中点的数量,则说明某些节点未被遍历,进而说明图中存…...

【2022.1.3】手脱压缩壳练习(含练习exe)
【2022.1.3】手脱压缩壳练习(含练习exe) 文章目录【2022.1.3】手脱压缩壳练习(含练习exe)0、简介1、单步跟踪法(#)方法介绍(0)练习exe下载(1)、查看源程序&am…...

【异或哈希】CF855 div3 F
感觉这道题跟之前有一题特别像,都是异或哈希感觉这种题应该很典,记录一下(66条消息) Codeforces Round #841 (Div. 2) and Divide by Zero【异或差分动态map维护】 2022 C. Even Subarrays_lamentropetion的博客-CSDN博客Problem - F - Codeforces题意&a…...

深度学习|改进两阶段鲁棒优化算法i-ccg
目录 1 主要内容 2 改进算法 2.1 CC&G算法的优势 2.2 i-CCG算法简介 3 结果对比 1 主要内容 自从2013年的求解两阶段鲁棒优化模型的列和约束生成算法(CC&G)被提出之后,基本没有实质性的创新,都是围绕该算法在各个领…...

C++11轻松打印本地时间
C11之前,想要获取时间并对其打印是有些困难的,因为C并没有标准时间库。想要对时间进行统计就需要调用C库,并且我们要考虑这样的调用是否能很好的封装到我们的类中。 C11之后,STL提供了 chrono 库,其让对时间的操作更加…...
Eureka - 总览
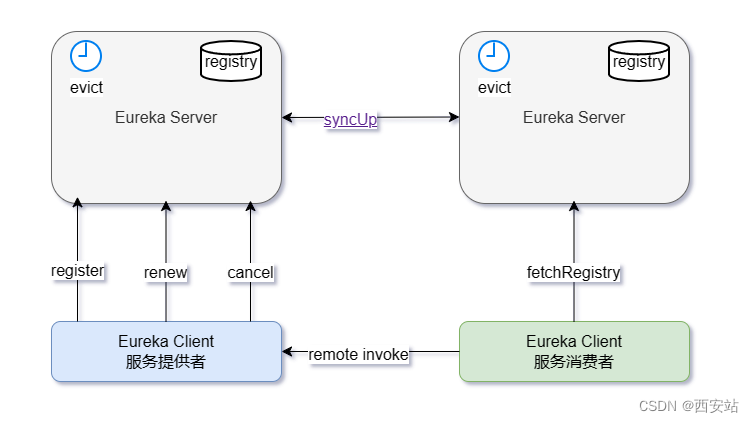
文章目录前言架构注册中心 Eureka Server服务提供者 Eureka Client服务消费者 Eureka Client总结资源前言 微服务(Microservices,一种软件架构风格)核心的组件包括注册中心,随着微服务的发展,出现了很多注册中心的解决…...

【算法设计-枚举、分治】素数、约数、质因数分解
文章目录1. 素数判定2. 素数筛选法3. 质因数分解4. 求一个数的约数5. 求两个数的最大公约数(GCD)6. 求两个数的最小公倍数(LCM)1. 素数判定 判定从 2 到sqrt(n)依次能否把 n 整除,若存在可以整除的数则说明 n 不是素数…...
)
【第十四届蓝桥杯】第三期模拟赛B组C++题解(待修正+持续更新-ing)
文章目录写在前面一、找最小数题目描述解题报告1、大体思路2、代码详解二、求列名题目描述解题报告1、大体思路2、代码详解三、求日期数题目描述解题报告1、大体思路2、代码详解四、取数题目描述解题报告1、大体思路2、代码详解五、最大连通分块题目描述解题报告1、大体思路2、…...
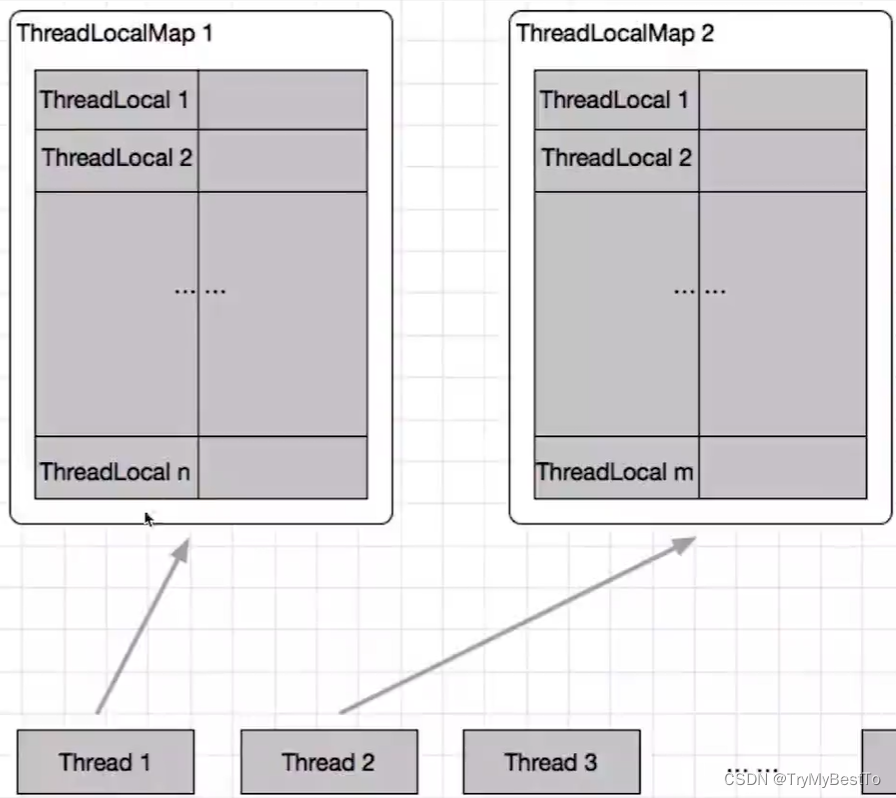
线程池和ThreadLocal详解
线程池和ThreadLocal详解线程池池化模式:线程池里的线程数量设定为多少比较合适?添加线程规则:实现原理:线程池实现任务复用的原理线程池状态:Executors 创线程池工具类手动创建(更推荐):自动创…...
)
[深入理解SSD系列综述 1.7] SSD固态存储市场发展分析与预测_固态存储技术发展方向(2022to2023)
前言 自2020年疫情爆发以来,远程办公、网上教育、流媒体等等应用引爆对消费电子及云服务的需求增长,全球数字化转型加速,带来了两年的闪存风光时刻。然而,进入2022年,在俄乌冲突、疫情重燃、通胀上升等一系列事件冲击下,全球经济下行风险加剧,对智能手机、PC等科技产品的…...

FLUX.1-dev-fp8-dit文生图GPU高性能部署:FP8+Triton内核优化推理延迟实测
FLUX.1-dev-fp8-dit文生图GPU高性能部署:FP8Triton内核优化推理延迟实测 最近在折腾AI图像生成,发现了一个性能怪兽——FLUX.1-dev-fp8-dit模型。这名字听起来有点复杂,简单说,它是一个专门为GPU优化过的文生图模型,主…...

双模型对比:OpenClaw接入Qwen3.5-4B-Claude与原版效果实测
双模型对比:OpenClaw接入Qwen3.5-4B-Claude与原版效果实测 1. 测试背景与实验设计 去年在开发一个自动化文档处理工具时,我发现OpenClaw的任务成功率高度依赖底层模型的逻辑推理能力。当时使用的标准Qwen模型在处理多步骤任务时经常出现"跳步&quo…...

如何用RecastNavigation构建完整的游戏AI导航系统:从入门到实战
如何用RecastNavigation构建完整的游戏AI导航系统:从入门到实战 【免费下载链接】recastnavigation Navigation-mesh Toolset for Games 项目地址: https://gitcode.com/gh_mirrors/re/recastnavigation 想要为你的游戏打造智能的AI导航系统吗?Re…...

Nunchaku-FLUX.1-dev镜像安全加固:非root运行/最小权限/网络策略限制
Nunchaku-FLUX.1-dev镜像安全加固:非root运行/最小权限/网络策略限制 1. 为什么需要安全加固? 当你把Nunchaku-FLUX.1-dev这个强大的文生图模型部署在自己的服务器上时,可能更多关注的是它能生成多么精美的图片,或者处理中文提示…...
结合:风格迁移与质量增强)
国风美学模型与卷积神经网络(CNN)结合:风格迁移与质量增强
国风美学模型与卷积神经网络(CNN)结合:风格迁移与质量增强 最近在尝试用AI生成国风图像时,我遇到了两个挺实际的问题。一个是生成的图片虽然意境不错,但风格上总觉得少了点传统水墨丹青的韵味;另一个是&am…...

可视化是对比原始数据和填补数据的强大工具。你可以使用箱线图、密度图或散点图来可视化原始数据和填补后的数据
下面的内容摘录自《用R探索医药数据科学》专栏文章的部分内容(原文5665字)。 2篇2章6节:R的多重填补法中随机回归填补法的应用,MICE包的实际应用和统计与可视化评估-CSDN博客 在数据分析中,缺失数据是常见且具有挑战性…...
)
无人机飞控必看:MPU6050互补滤波实战对比测试(DMP vs Mahony)
MPU6050姿态解算实战:Mahony互补滤波与DMP深度对比 去年调试四轴飞行器时,我曾连续72小时盯着屏幕上的姿态角曲线发呆——为什么明明静止的飞控板,Roll角却以每小时5度的速度缓慢偏移?这个困扰无数开发者的经典问题,最…...

Auto-Photoshop-StableDiffusion-Plugin中文适配终极指南:让AI绘画更懂中文用户
Auto-Photoshop-StableDiffusion-Plugin中文适配终极指南:让AI绘画更懂中文用户 【免费下载链接】Auto-Photoshop-StableDiffusion-Plugin A user-friendly plug-in that makes it easy to generate stable diffusion images inside Photoshop using either Automat…...

别只写对话了!Ren‘Py高级玩家都在用的5个隐藏技巧:转场、音效、变量与存档
别只写对话了!RenPy高级玩家都在用的5个隐藏技巧:转场、音效、变量与存档 当你已经能够用RenPy制作基础视觉小说时,是否发现自己的作品总像"电子版小说"?真正的商业级作品会通过动态转场、环境音效、分支剧情等设计让玩…...

AI生成内容检测新思路:除了红绿词表,我们还能用哪些方法识别ChatGPT写的文章?
AI生成内容检测技术全景:超越红绿词表的七种实战方法 当ChatGPT生成的论文摘要通过学术评审、AI撰写的新闻稿被主流媒体刊发时,内容真实性的边界正在变得模糊。某高校教授最近向我展示了一份学生作业——文笔流畅的哲学论述,最终被证实完全由…...