pcl+vtk(十四)vtkCamera相机简单介绍
一、vtkCamera相机
人眼相当于三维场景下的相机, VTK是用vtkCamera类来表示三维渲染场景中的相机。vtkCamera负责把三维场景投影到二维平面,如屏幕、图像等。
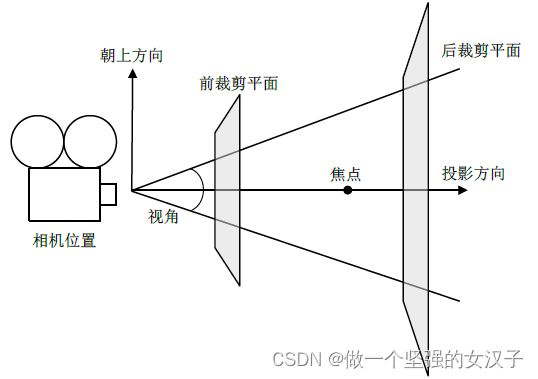
相机位置:即相机所在的位置,用方法vtkCamera::SetPosition()设置。
相机焦点:用方法vtkCamera::SetFocusPoint()设置,默认的焦点位置在世界坐标系的原点。
朝上方向:即哪个方向为相机朝上的方向。就好比我们直立看东西,方向为头朝上,看到的东西也是直立的,如果我们倒立看某个东西,这时方向为头朝下,看到的东西当然就是倒立的。相机位置、相机焦点和朝上方向三个因素确定了相机的实际方向,即确定相机的视图。
投影方向:相机位置到相机焦点的向量方向即为投影方向。
投影方法:确定Actor是如何映射到像平面的。vtkCamera定义了两种投影方法,一种是正交投影(OrthographicProjection),也叫平行投影(Parallel Projection),即进入相机的光线与投影方向是平行的。另一种是透视投影(PerspectiveProjection),即所有的光线相交于一点。
视角:透视投影时需要指定相机的视角(View Angle),默认的视角大小为30º,可以用方法vtkCamera::SetViewAngle()设置。
前后裁剪平面:裁剪平面与投影方向相交,一般与投影方向也是垂直的。裁剪平面主要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的。裁剪平面的位置可以用方法vtkCamera::SetClippingRange()设置。
二、vtkCamera相机参数
void vtkCamera::SetViewUp(double vx, double vy, double vz);设置相机的朝上方向,默认为(0, 1, 0)
void vtkCamera::SetPosition(double x, double y, double z); 设置相机位置,默认为(0, 0, 1)
void vtkCamera::SetFocalPoint(double x, double y, double z);设置焦点,默认为(0, 0, 0)
void vtkCamera::SetClippingRange(double dNear, double dFar);设置前后裁剪平面位置,默认为(0.1, 1000)
void vtkCamera::SetViewAngle(double angle); 设置相机视角,默认为30度,如果为平行投影则该角度无效
void vtkCamera::ComputeViewPlaneNormal();根据设置的相机位置、焦点等信息,重新计算视平面(View Plane)的法向量。一般该法向量与视平面是垂直的,如果不是垂直的话,Actor等看起来会有一些特殊的效果,如错切。
用方法vtkRenderer::GetActiveCamera()获取vtkRenderer渲染器里默认的相机。
用方法vtkRenderer::SetActiveCamera()把相机设置到渲染场景中。
三、vtkCamera控制相机运动
vtkCamera::Dolly(double value);
将相机与焦点的距离除以给定的推拉值。使用大于1的值向焦点推拉,使用小于1的值远离焦点推拉。
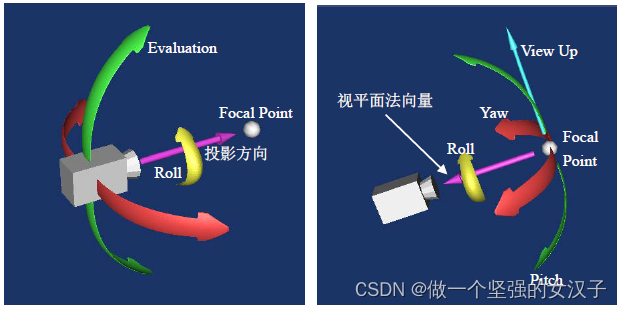
vtkCamera::Roll(double angle);
围绕投影方向旋转相机。这将使摄影机绕其轴旋转。
vtkCamera::Azimuth(double angle);
围绕以焦点为中心的视图向上矢量旋转相机。请注意,视图向上矢量是通过SetViewUp设置的,不一定垂直于投影方向。结果是相机的水平旋转(纬度)。
vtkCamera::Yaw(double angle);
使用相机的位置作为旋转中心,围绕视图向上矢量旋转焦点。请注意,视图向上矢量是通过SetViewUp设置的,不一定垂直于投影方向。结果是场景的水平旋转(纬度)。
vtkCamera::Elevation(double angle);
使用焦点作为旋转中心,围绕投影方向的负值与视图向上向量的叉积旋转相机。结果是场景的垂直旋转(经度)。
vtkCamera::Pitch(double angle);
使用相机的位置作为旋转中心,围绕视图向上矢量和投影方向的叉积旋转焦点。结果是摄影机垂直旋转(经度)。
vtkCamera::Zoom(double factor);
在透视模式下,将视角减小指定的因子。在平行模式下,将平行比例减小指定的因子。值大于1表示放大,值小于1表示缩小@注意:当UseExplicitProjectionTransformMatrix为true时,将忽略此设置。
重置相机参数。
参考文献:
VTK笔记-相机vtkCamera_vtk重置相机-CSDN博客
VTK相机参数_vtk camera默认参数-CSDN博客
VtkCamera总结_vtk体绘制相机-CSDN博客
相关文章:
pcl+vtk(十四)vtkCamera相机简单介绍
一、vtkCamera相机 人眼相当于三维场景下的相机, VTK是用vtkCamera类来表示三维渲染场景中的相机。vtkCamera负责把三维场景投影到二维平面,如屏幕、图像等。 相机位置:即相机所在的位置,用方法vtkCamera::SetPosition()设置。 相…...

TS基础知识点快速回顾(上)
基础介绍 什么是 TypeScript? TypeScript,简称 ts,是微软开发的一种静态的编程语言,它是 JavaScript 的超集。 那么它有什么特别之处呢? js 有的 ts 都有,所有js 代码都可以在 ts 里面运行。ts 支持类型支持&#…...
无法使用)
hook(post-receive)无法使用
hook(post-receive)无法使用 为什么无法使用? 只有一个问题:权限不够,你想想,blog.git是一个中转站,咱们要把上传的东西转到blog下面,肯定要有写入操作呀,这个Git仓库的…...
qt学习:tcp区分保存多个客户端
在前面文掌的tcp客服端服务端进行更改 qt学习:Network网络类tcp客户端tcp服务端-CSDN博客https://blog.csdn.net/weixin_59669309/article/details/135842933?spm1001.2014.3001.5501前面的服务端每次有新的客户端连接,就会覆盖掉原来的指针࿰…...

ORM-08-EclipseLink 入门介绍
拓展阅读 The jdbc pool for java.(java 手写 jdbc 数据库连接池实现) The simple mybatis.(手写简易版 mybatis) 1. EclipseLink概述 本章介绍了EclipseLink及其关键特性:包括在EclipseLink中的组件、元数据、应用程序架构、映射和API。 本…...

数据结构之树和二叉树定义
数据结构之树和二叉树定义 1、树的定义2、树的基本概念3、二叉树的定义 数据结构是程序设计的重要基础,它所讨论的内容和技术对从事软件项目的开发有重要作用。学习数据结构要达到的目标是学会从问题出发,分析和研究计算机加工的数据的特性,以…...
大模型学习与实践笔记(十三)
将训练好的模型权重上传到 OpenXLab 方式1: 先将Adapter 模型权重通过scp 传到本地,然后网页上传 步骤1. scp 到本地 命令为: scp -o StrictHostKeyCheckingno -r -P *** rootssh.intern-ai.org.cn:/root/data/ e/opencv/ 步骤2&#…...

计算机网络——网络层(1)
计算机网络——网络层(1) 小程一言专栏链接: [link](http://t.csdnimg.cn/ZUTXU) 网络层:数据平面网络层概述核心功能协议总结 路由器工作原理路由器的工作步骤总结 网际协议IPv4主要特点不足IPv6主要特点现状 通用转发和SDN通用转发SDN(软件…...

解释LoRA参数
目录 LoRA参数含义 LoRA在深度学习中的作用 示例代码中的LoRA应用 结论 LoRA参数含义 LoRA (lora_r): LoRA代表"Low-Rank Adaptation",是一种模型参数化技术,用于在不显著增加参数数量的情况下调整预训练模型。lora_r参数指的是LoRA中的秩&…...
直播核心岗位基础内容
一.直播间核心岗位 1.直播间前端岗位 前端岗位分工 (1)主播岗位职责 (2)场控岗位职责 (3)助理岗位职责 中端岗位分工 (1)运营岗位职责 (2)中控岗位职责 …...
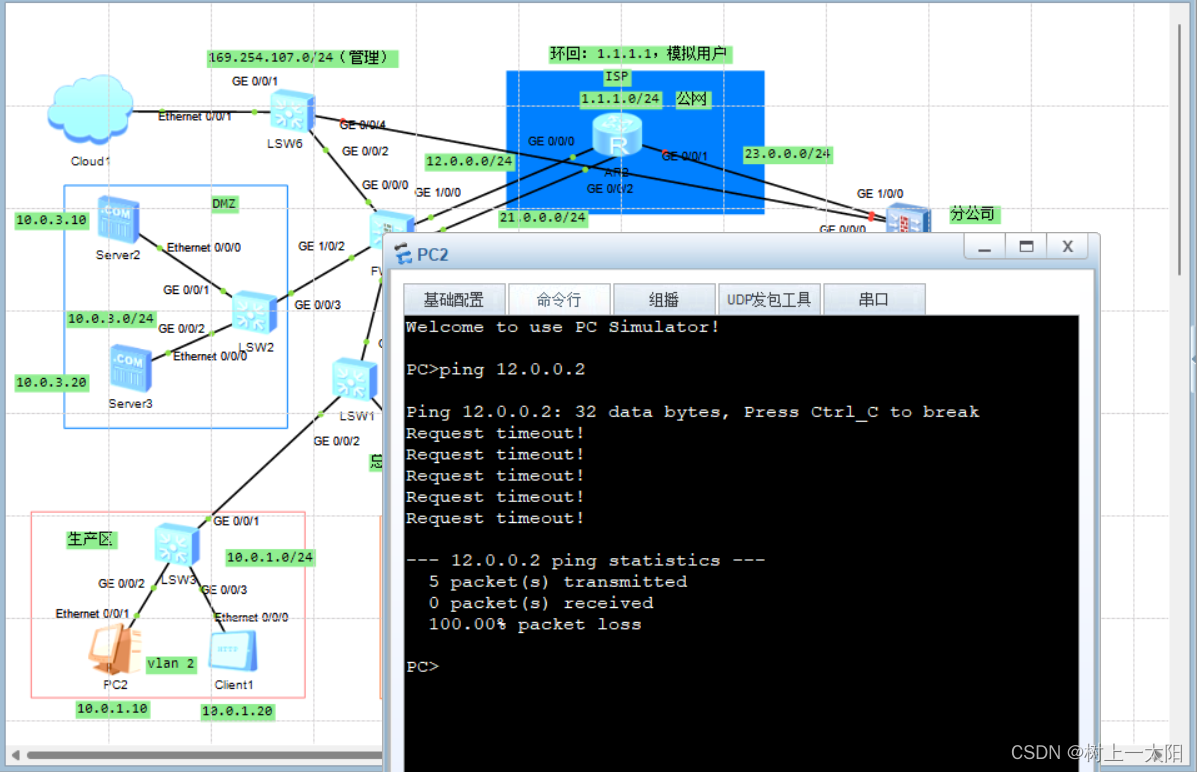
安全防御第三次作业
作业:拓扑图及要求如下图 注:server1是ftp服务器,server2是http服务器 lsw1: 其中g0/0/0口为trunk 实现 1,生产区在工作时间内可以访问服务器区,仅可以访问http服务器 验证: 2,办公…...
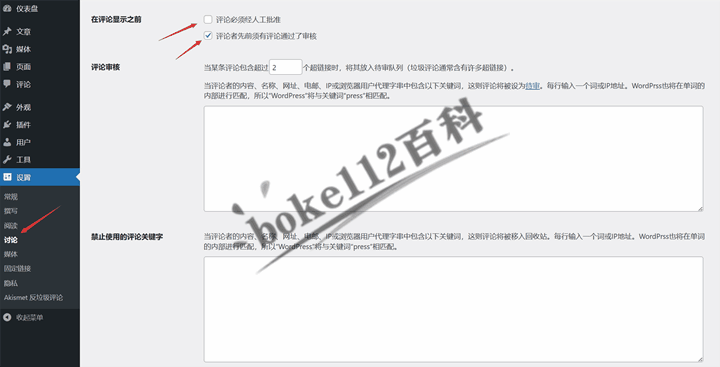
WordPress反垃圾评论插件Akismet有什么用?如何使用Akismet插件?
每次我们成功搭建好WordPress网站后,都可以在后台 >> 插件 >> 已安装的插件,在插件列表中可以看到有一个“Akismet反垃圾邮件:垃圾邮件保护”的插件(个人觉得是翻译错误,应该是反垃圾评论)。具…...
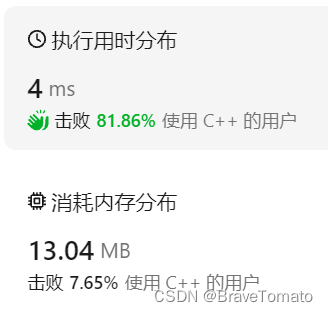
力扣80、删除有序数组中的重复项Ⅱ(中等)
1 题目描述 图1 题目描述 2 题目解读 对于有序数组nums,要求在不使用额外数组空间的条件下,删除数组nums中重复出现的元素,使得nums中出现次数超过两次的元素只出现两次。返回删除后数组的新长度。 3 解法一:双指针 双指针法可以…...

探索HTMLx:强大的HTML工具
1. HTMLX htmx 是一个轻量级的 JavaScript 库,它允许你直接在 HTML 中使用现代浏览器的功能,而不需要编写 JavaScript 代码。通过 htmx,你可以使用 HTML 属性执行 AJAX 请求,使用 CSS 过渡动画,利用 WebSocket 和服务…...
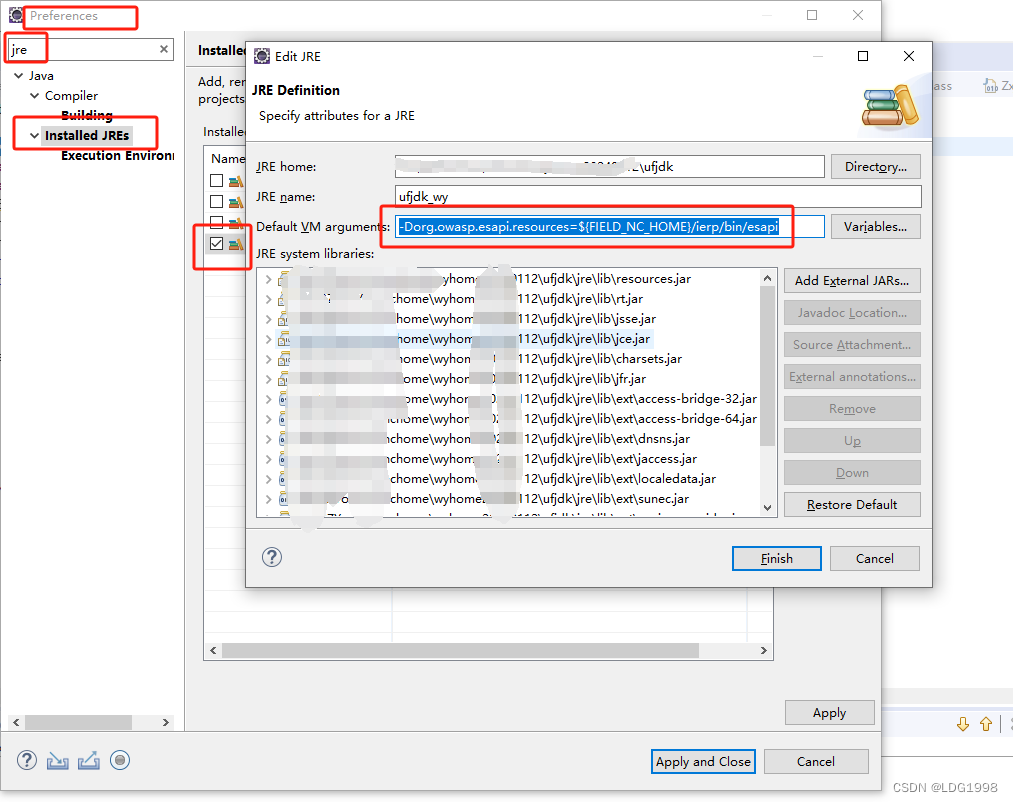
NC65中间件能启动,前端客户端启动失败,加载异常,卡住(org.owasp.esapi)
控制台输出错误 ESAPI.properties could not be loaded by any means. Fail.SecurityConfiguration class(org.owasp.esapi.reference.DefaultSecurityConfiguration) CTOR threw exception.效果图: 解决方案 添加如下参数: -Dorg.owasp.esapi.resou…...
【大数据】YARN调度器及调度策略
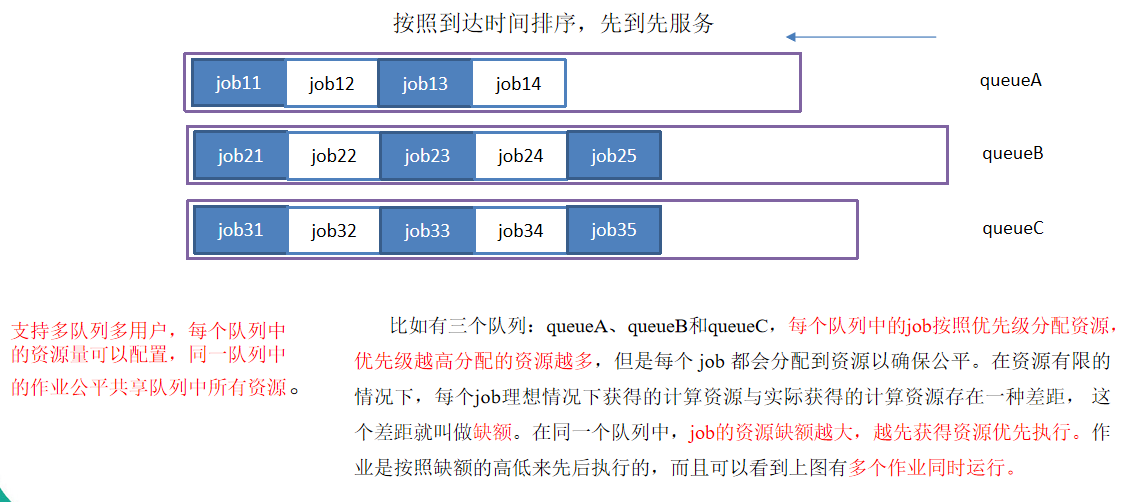
YARN调度器 YARN负责作业资源调度,在集群中找到满足业务的资源,帮助作业启动任务,管理作业的生命周期。 YARN技术架构 目前,Hadoop作业调度器主要有三种:先进先出调度器(First In First Out&…...

如何快速入门Python指南
在数字化时代,掌握一门编程语言已成为众多行业和职业必备的技能之一。Python以其简洁易读的语法、丰富的库资源以及强大的跨领域应用能力,成为了初学者学习编程的理想选择。本文旨在为新手提供一套全面且深入的Python学习路径,并结合实践建议…...

vue3 页面长时间不使用,再次点击页面切换路由 操作无效报错
问题描述: 使用Vite打包构建的项目,重新部署到生产。在部署期间用户一直停留在当前项目页面(长时间无操作 半个小时),部署完成后点击页面上的路由,报错! 刷新后恢复正常。出现问题原因: 上线打…...

【算法练习】leetcode算法题合集之动态规划篇
普通动规系列 LeetCode343. 整数拆分 LeetCode343. 整数拆分 将10的结果存在索引为10的位置上,需要保证数组长度是n1,索引的最大值是n,索引是从0开始的。 n的拆分,可以拆分为i和n-i,当然i可以继续拆分。而且拆分为n-…...

青少年人工智能实验基地解决方案
1. 方案背景 1.1人工智能创新教育解决方案背景 人工智能已成为引领未来的新兴技术,中国将人工智能列为国家重点发展战略,对人工智能的发展做出了总体部署,全面加速人工智能在研发应用和人才培养的步伐。2021年1月教育部官网公布《关于政协十…...

不精确计算:芯片设计中的功耗优化与精度权衡技术
1. 不精确计算:从学术概念到芯片设计的功耗革命在移动设备、物联网终端和边缘计算节点无处不在的今天,功耗已经取代了单纯的性能,成为许多芯片设计的首要约束。我们习惯了处理器以全精度、零误差的方式执行每一条指令,但你是否想过…...

开源AI投资情报工具MacroClaw:从数据抓取到智能分析的完整实践
1. 项目概述:一个实时投资情报的AI智能体如果你和我一样,每天需要花大量时间在财经新闻、大宗商品价格和地缘政治动态上,试图从海量信息中提炼出对投资决策有用的信号,那你一定明白这有多耗时耗力。传统的资讯平台要么信息滞后&am…...

告别混乱!用Cadence Allegro SPB17.4从DXF文件创建PCB封装的完整清洁流程
告别混乱!用Cadence Allegro SPB17.4从DXF文件创建PCB封装的完整清洁流程 在PCB设计领域,从机械图纸(DXF)快速创建精确的封装是工程师常面临的挑战。许多设计师都经历过这样的困扰:导入DXF后,封装在3D预览中…...

用Python自动化Photoshop:解锁高效图像处理的终极指南
用Python自动化Photoshop:解锁高效图像处理的终极指南 【免费下载链接】photoshop-python-api Python API for Photoshop. 项目地址: https://gitcode.com/gh_mirrors/ph/photoshop-python-api Photoshop Python API 是一款强大的工具包,让开发者…...

QFN封装芯片手工焊接实战:从焊盘处理到拖焊技巧
1. QFN封装芯片手工焊接前的准备工作 QFN(Quad Flat No-lead)封装芯片因其体积小、散热好、电气性能优异等特点,在现代电子设备中越来越常见。但0.5mm甚至更小的引脚间距,让很多工程师和DIY爱好者在手工焊接时望而却步。其实只要掌…...

5个关键步骤掌握PyAEDT:从安装到高级仿真实战指南
5个关键步骤掌握PyAEDT:从安装到高级仿真实战指南 【免费下载链接】pyaedt AEDT Python Client Package 项目地址: https://gitcode.com/gh_mirrors/py/pyaedt PyAEDT作为Ansys Electronics Desktop的Python客户端库,为工程师提供了强大的电子设计…...

Windows XP图标主题完整指南:轻松为Linux桌面注入经典怀旧风格
Windows XP图标主题完整指南:轻松为Linux桌面注入经典怀旧风格 【免费下载链接】Windows-XP Remake of classic YlmfOS theme with some mods for icons to scale right 项目地址: https://gitcode.com/gh_mirrors/win/Windows-XP 还在怀念Windows XP那个经典…...

Gemini3.1Pro轻松搞定文献综述难题
对很多学生党来说,论文开题最难的地方,不是选题本身,而是文献综述。 题目定下来了,方向也有了,但一翻到文献就发现:资料很多、观点很多、结构却很乱,不知道怎么归纳,更不知道怎么写得…...

终极图形化方案:Applite如何让Mac软件管理变得简单快速
终极图形化方案:Applite如何让Mac软件管理变得简单快速 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为Mac上的软件安装、更新和卸载而烦恼吗?Ap…...

CodeContext:基于MCP协议与AI模式检测,让AI编程助手深度适配你的代码库
1. 项目概述:让AI助手真正“懂”你的代码库如果你和我一样,每天都在用Cursor或者GitHub Copilot这类AI编程助手,那你肯定也经历过这种时刻:AI给你生成了一段看起来功能正确的代码,但它的错误处理方式、导入风格、命名习…...