【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库
【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库
文章目录
- 【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库
- 一、ROS中的头文件和源文件
- 1.1 自定义头文件调用
- 1.2 自定义源文件调用
- 二、Python模块的导入
- Reference
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
一、ROS中的头文件和源文件
本节主要介绍ROS的C++实现中,如何使用头文件与源文件的方式封装代码,具体内容如下:
- 设置头文件,可执行文件作为源文件;
- 分别设置头文件,源文件与可执行文件。
在ROS中关于头文件的使用,核心内容在于CMakeLists.txt文件的配置,不同的封装方式,配置上也有差异。
1.1 自定义头文件调用
需求: 设计头文件,可执行文件本身作为源文件。
流程:
- 编写头文件;
- 编写可执行文件(同时也是源文件);
- 编辑配置文件并执行。
1、头文件
再功能包的include/功能包名目录下新建头文件:hello.h,示例内容如下:
#ifndef _HELLO_H
#define _HELLO_Hnamespace hello_ns{class HelloPub {public:void run();
};}#endif
注意:
在VsCode中,为了后续包含头文件时不抛出异常,请配置.vscode下的c_cpp_properties.json的includepath属性。
"/home/用户/工作空间/src/功能包/include/**"
2、可执行文件
在src目录下新建文件:hello.cpp,示例内容如下:
#include "ros/ros.h"
#include "test_head/hello.h"namespace hello_ns {void HelloPub::run(){ROS_INFO("自定义头文件的使用....");
}}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"test_head_node");hello_ns::HelloPub helloPub;helloPub.run();return 0;
}
3、配置CMakeLists.txt文件
配置CMakeLists.txt文件,头文件相关配置如下:
include_directories(
include${catkin_INCLUDE_DIRS}
)
可执行配置文件配置方式和之前一致:
add_executable(hello src/hello.cpp)add_dependencies(hello ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(hello${catkin_LIBRARIES}
)
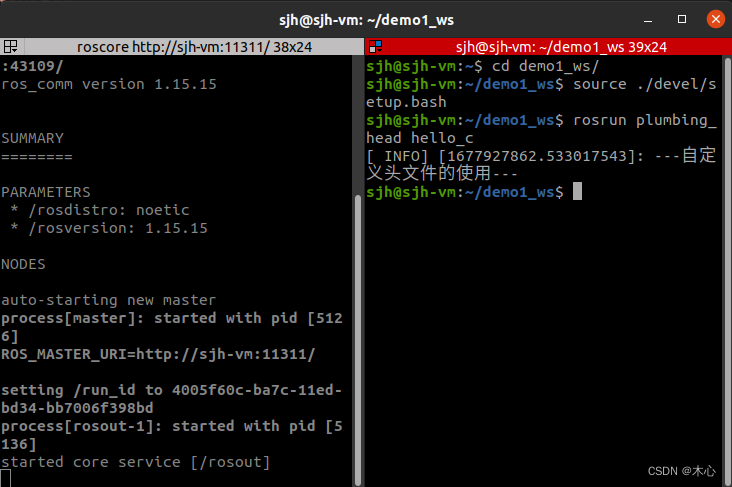
最后编译并执行,控制台可以输出自定义的文本信息。
效果如下:
1.2 自定义源文件调用
**需求:**设计头文件与源文件,在可执行文件中包含头文件。
流程:
- 编写头文件;
- 编写源文件;
- 编写可执行文件;
- 编辑配置文件并执行。
1、头文件
头文件的设置和3.2.1类似,在功能包下的include/功能包名目录下,新建头文件haha.h,示例内容如下:
#ifndef _HAHA_H
#define _HAHA_Hnamespace hello_ns {class My {public:void run();};}#endif
2、源文件
在src目录下新建文件:haha.cpp,示例内容如下:
#include "test_head_src/haha.h"
#include "ros/ros.h"namespace hello_ns{void My::run(){ROS_INFO("hello,head and src ...");
}}
3、可执行文件
在src目录下新建文件:use_head.cpp,示例内容如下:
#include "ros/ros.h"
#include "test_head_src/haha.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"hahah");hello_ns::My my;my.run();return 0;
}
4、配置CMakeLists.txt文件
头文件与源文件相关配置:
include_directories(
include${catkin_INCLUDE_DIRS}
)## 声明C++库
add_library(headinclude/test_head_src/haha.hsrc/haha.cpp
)add_dependencies(head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(head${catkin_LIBRARIES}
)
可执行文件配置:
add_executable(use_head src/use_head.cpp)add_dependencies(use_head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})#此处需要添加之前设置的 head 库
target_link_libraries(use_headhead${catkin_LIBRARIES}
)
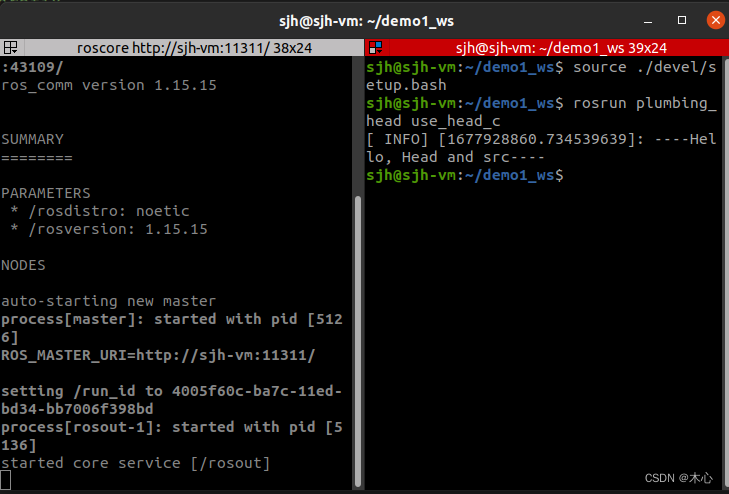
结果示例:
二、Python模块的导入
与C++类似的,在Python中导入其他模块时,也需要相关处理。
**需求:**首先新建一个Python文件A,再创建Python文件UseA,在UseA中导入A并调用A的实现。
实现:
- 新建两个Python文件,使用 import 实现导入关系;
- 添加可执行权限、编辑配置文件并执行UseA。
1、新建两个Python文件并使用import导入
文件A实现(包含一个变量)
#! /usr/bin/env python
num = 1000
文件B核心实现
import os
import syspath = os.path.abspath(".")
# 核心
sys.path.insert(0,path + "/src/plumbing_pub_sub/scripts")import tools....
....rospy.loginfo("num = %d",tools.num)
2、添加可执行权限,编辑配置文件并执行
略
示例结果:

Reference
http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/224-fu-wu-tong-xin-zi-ding-yi-srv-diao-yong-b-python.html
相关文章:
【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库
【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库 文章目录【ROS学习笔记10】ROS中配置自定义Cpp头文件和导入自定义Python库一、ROS中的头文件和源文件1.1 自定义头文件调用1.2 自定义源文件调用二、Python模块的导入Reference写在前面,本系列笔记参…...

svn 分支(branch)和标签(tag)管理
版本控制的一大功能是可以隔离变化在某个开发线上,这个开发线就是分支(branch)。分支通常用于开发新功能,而不会影响主干的开发。也就是说分支上的代码的编译错误、bug不会对主干(trunk)产生影响。然后等分…...
@Transactional详解
一、事务的概念 百度百科: 事务(Transaction),一般是指要做的或所做的事情。在计算机术语中是指访问并可能更新数据库中各种数据项的一个程序执 行单元(unit)。事务通常由高级数据库操纵语言或编程语言(如SQL&#x…...
机器学习:Transformer
Transformer sequence-to-sequence(seq2seq) 很大语音没有文本,7000种中超半数没有文字。 遇到的问题: 遇到问题时候可以先不管它,先出一个baseline看看效果,后续再进行提升。 tts: 文本转语音,语音合成…...

pytorch-模型构建,参数访问,模型存取API接口,对比学习
多层感知机的简洁实现pytorch-多层感知机,最简单的深度学习模型,将非线性激活函数引入到模型中。_羞儿的博客-CSDN博客中含单隐藏层的多层感知机的实现方法。首先构造Sequential实例,然后依次添加两个全连接层。其中第一层的输出大小为256&am…...

javaEE 初阶 — 数据链路层中的以太网数据帧
文章目录以太网帧格式1. MAC 地址2. MAC 地址是如何与 IP 地址相互配合的3. 以太网帧格式中的类型MTU(了解)以太网帧格式 数据链路层主要考虑的是相邻的两个结点之间的传输。 这里最知名的协议就是 以太网。 一个以太网数据帧有三个部分组成。帧头载荷…...

泼辣修图Polarr5.11.4 版,让你的创意无限延伸
泼辣修图是一款非常实用的图片处理软件,它不仅拥有丰富的图片处理功能,而且还能够轻松地实现自定义操作。泼辣修图的操作界面非常简洁,功能也非常丰富,使用起来非常方便快捷。 泼辣修图拥有非常丰富的图片处理功能,包括…...
leetcode打卡-深度优先遍历和广度优先遍历
200.岛屿数量 leetcode题目链接:https://leetcode.cn/problems/number-of-islands leetcode AC记录: 思路:深度优先遍历,从0,0开始遍历数组,使用boolean类型数组used记录是否被访问过,进行一…...

【0177】Linux中POSIX信号量实现机制
文章目录 1. 信号量概念1.1 信号量类比1.2 重要的观察1.3 信号量分类2. POSIX与System V信号量3. 信号量API4. 代码演示5. 信号量内核实现1. 信号量概念 在计算机科学中,信号量(semaphores )是一种变量或抽象数据类型,用于控制多个进程对公共资源的访问,并避免并发系统(如…...
跳表--C++实现
目录 作者有话说 为何要学习跳表?为了快,为了更快,为了折磨自己..... 跳表作用场景 1.不少公司自己会设计哈希表,如果解决哈希冲突是不可避免的事情。通常情况下会使用链址,很好理解,当有冲突产生时&#…...

c#:System.Text.Json 的使用一
环境: .net 6.0vs2022 参考: 从 Newtonsoft.Json 迁移到 System.Text.Json System.Text.Json 常规用法 一、写入时的控制 1.1 非ascii码转换 直接看代码: var str System.Text.Json.JsonSerializer.Serialize(new Model { Id 1, Name …...
kaggle数据集下载当中所遇到的问题
kaggle数据集下载当中所遇到的问题报错分析pip install kagglethe SSL module is not available解决方法pip的版本升级解决办法下载kaggle包kaggle数据集下载问题解决参考内容报错分析 今天在尝试使用pip install kaggle的方法去下载我需要的数据集的时候遇到了一些报错的问题…...

TEX:高阶用法
文章目录定制LATEX记数器创建记数器改变记数器的值显示记数器的值长度橡皮长度用户定义命令用户定义的环境标题定制正文中标题设置使用titlesec宏包设置标题格式目录中标题设置LATEX 2ε\varepsilonε程序设计语言命令的层次文件识别上载其他类和宏包输入文件检测文件选项的处理…...
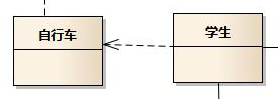
UML 类图
车的类图结构为<>,表示车是一个抽象类; 它有两个继承类:小汽车和自行车;它们之间的关系为实现关系,使用带空心箭头的虚线表示; 小汽车为与SUV之间也是继承关系,它们之间的关系为泛化关系…...

项目实战典型案例1——redis只管存不管删除 让失效时间删除的问题
redis只管存不管删除 让失效时间删除的问题一:背景介绍二:思路&方案三:代码模拟1.错误示范通过班级id查询课程名称执行结果通过班级id修改课程名称(并没有删除对应缓存)执行结果2.正确示范在错误示范的更新接口上添…...
@RequestParam和@PathVariable的用法与区别
PathVariable PathVariable 映射 URL 绑定的占位符带占位符的 URL 是 Spring3.0 新增的功能,该功能在SpringMVC 向 REST 目标挺进发展过程中具有里程碑的意义通过 PathVariable 可以将 URL 中占位符参数绑定到控制器处理方法的入参中:URL 中的 {xxx} 占…...

【大数据 AI 人工智能】数据科学家必学的 9 个核心机器学习算法
如今,机器学习正改变着我们的世界。借助机器学习(ML),谷歌在为我们推荐搜索结果,奈飞在为我们推荐观看影片,脸书在为我们推荐可能认识的朋友。 机器学习从未像在今天这样重要。但与此同时,机器学习这一领域也充斥着各种术语,晦涩难懂,各种机器学习的算法每年层出不穷…...
IronPDF for .NET 2023.2.4 Crack
适用于 .NET 2023.2.4 的 IronPDF 添加对增量 PDF 保存的支持。 2023 年 3 月 2 日 - 10:23新版本 特征 添加了对 IronPdfEngine Docker 的支持。 添加了对增量 PDF 保存的支持。 重新设计了 PDF 签名和签名。 删除了 iTextSharp 依赖项。 在文本页眉/页脚中添加了 DrawDivider…...

3.4-前端的10个问题
01、null和undefined undefined是全局对象的一个属性,当一个变量没有赋值或者访问一个对象不存在的属性,这时候都是undefined。 null:表示是一个空对象。在需要释放一个对象的时候,直接赋值为null即可。 02、箭头函数 箭头函数…...

开发手册——一、编程规约_9.其他
这篇文章主要梳理了在java的实际开发过程中的编程规范问题。本篇文章主要借鉴于《阿里巴巴java开发手册终极版》 下面我们一起来看一下吧。 1. 【强制】在使用正则表达式时,利用好其预编译功能,可以有效加快正则匹配速度。 说明:不要在方法…...

前端框架选择指南:别再盲目跟风了!
前端框架选择指南:别再盲目跟风了! 毒舌时刻 前端框架?听起来就像是前端工程师为了显得自己很专业而特意搞的一套复杂流程。你以为随便选个框架就能解决所有问题?别做梦了!到时候你会发现,框架的坑比你想象…...

突破限制与全版本支持:MediaCreationTool.bat重新定义Windows安装介质制作
突破限制与全版本支持:MediaCreationTool.bat重新定义Windows安装介质制作 【免费下载链接】MediaCreationTool.bat Universal MCT wrapper script for all Windows 10/11 versions from 1507 to 21H2! 项目地址: https://gitcode.com/gh_mirrors/me/MediaCreatio…...

Qwen3.5-2B企业应用案例:制造业设备手册图像问答系统搭建全流程
Qwen3.5-2B企业应用案例:制造业设备手册图像问答系统搭建全流程 1. 项目背景与需求分析 在制造业生产现场,设备操作手册是工人日常工作的必备参考资料。传统纸质手册或PDF文档存在以下痛点: 查找效率低:遇到问题时需要手动翻阅…...

为什么Snap卸载Docker总卡在快照?揭秘自动备份机制与3种强制中断方案
为什么Snap卸载Docker总卡在快照?深度解析与实战解决方案 当你尝试卸载通过Snap安装的Docker时,是否遇到过进度条卡在"Save data of snap docker in automatic snapshot set #3"的情况?这种看似简单的卸载操作背后,隐藏…...

AI黑科技展示:CYBER-VISION零号协议实时视频分割效果
AI黑科技展示:CYBER-VISION零号协议实时视频分割效果 1. 未来已来:当AI视觉遇见赛博朋克 想象一下这样的场景:一位视障人士戴上智能眼镜,眼前的世界突然变得清晰可辨——人行道上的盲道被高亮标注,前方的障碍物用醒目…...

Graphormer高性能部署:PyTorch 2.8.0 + Torch-Geometric 2.4优化实践
Graphormer高性能部署:PyTorch 2.8.0 Torch-Geometric 2.4优化实践 1. 引言 Graphormer是一种基于纯Transformer架构的图神经网络,专为分子属性预测任务设计。与传统的图神经网络(GNN)相比,Graphormer通过全局注意力机制直接建模分子图中原…...

VBA UserForm控件交互实战:跨窗体数据传递与动态更新
1. UserForm基础与跨窗体数据传递原理 刚接触VBA UserForm时,我经常被各种控件的交互问题困扰。特别是当需要多个窗体协同工作时,数据传递就成了大难题。记得有次做订单管理系统,主窗体收集客户信息,子窗体处理产品明细࿰…...

PyTorch 2.8镜像实操手册:Git+vim+htop+screen开发运维一体化工作流
PyTorch 2.8镜像实操手册:Gitvimhtopscreen开发运维一体化工作流 1. 镜像概述与环境准备 PyTorch 2.8深度学习镜像是一个为专业开发者打造的全功能工作环境,基于RTX 4090D 24GB显卡和CUDA 12.4进行了深度优化。这个镜像不仅预装了最新版的PyTorch框架&…...

玩转openrgb
缘由我的asus b760m有rgb,但是华硕Armoury Crate 确实比较臃肿,经常啥也没干它占用3-5%。而开源界有个openrgb,虽然看似简陋但是它小啊。于是采用python脚本openrgb来玩转它。本方案应该也适用于其他rgb主板。准备工作1、下载openrgb…...

DYOR 嘉创地产 02421.HK
文章目录1.公司概况1.1 简介1.2 股权结构1.3 核心资质与定位2.业务布局3.财务与市场表现:业绩承压,规模迷你3.1 业绩大幅下滑3.2 市场表现落后3.3 规模在行业中垫底4.核心优势5.潜在风险与隐忧6.小结参考文献1.公司概况 1.1 简介 嘉创地产是一家脱胎于…...