单片机14-17
目录
LCD1602
LCD1602液晶显示屏
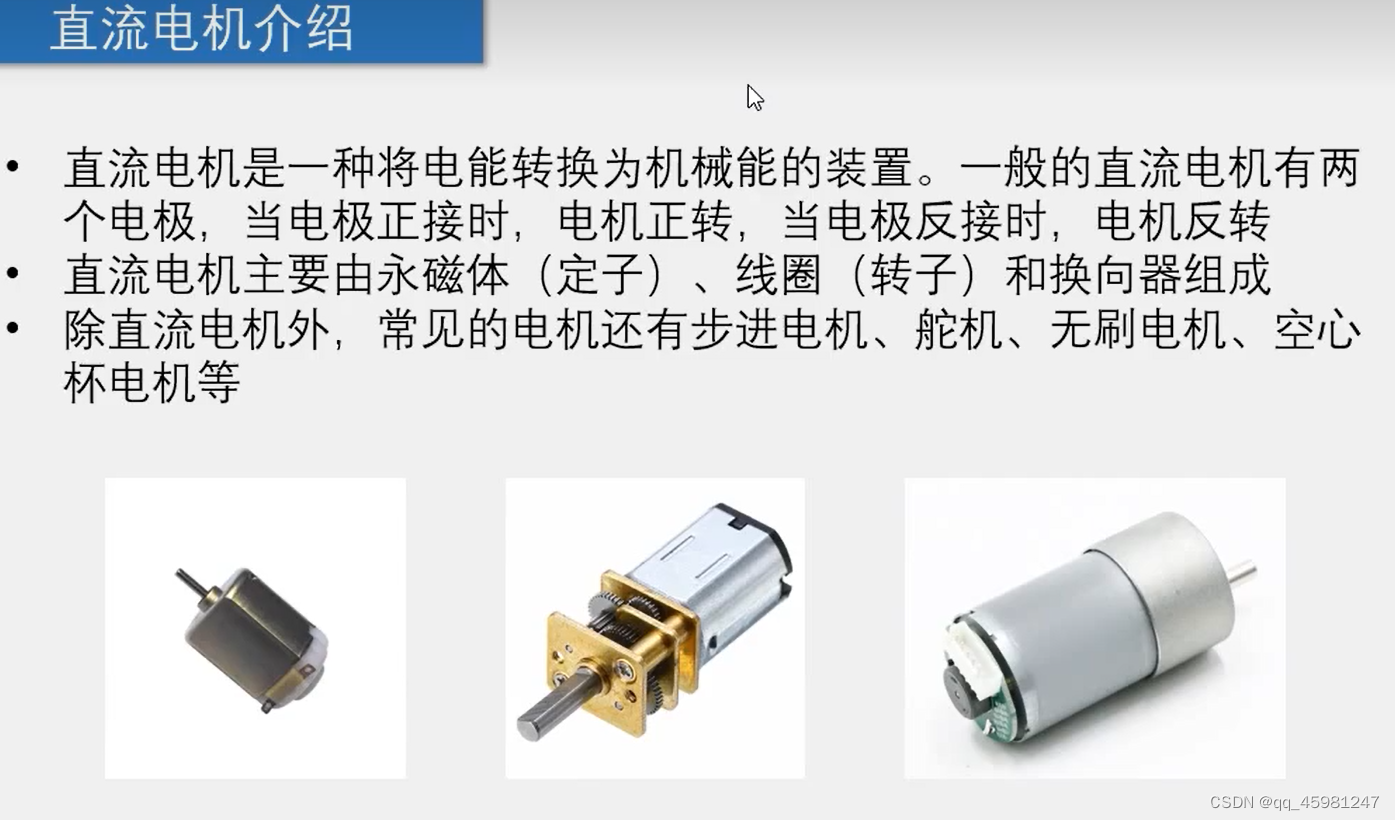
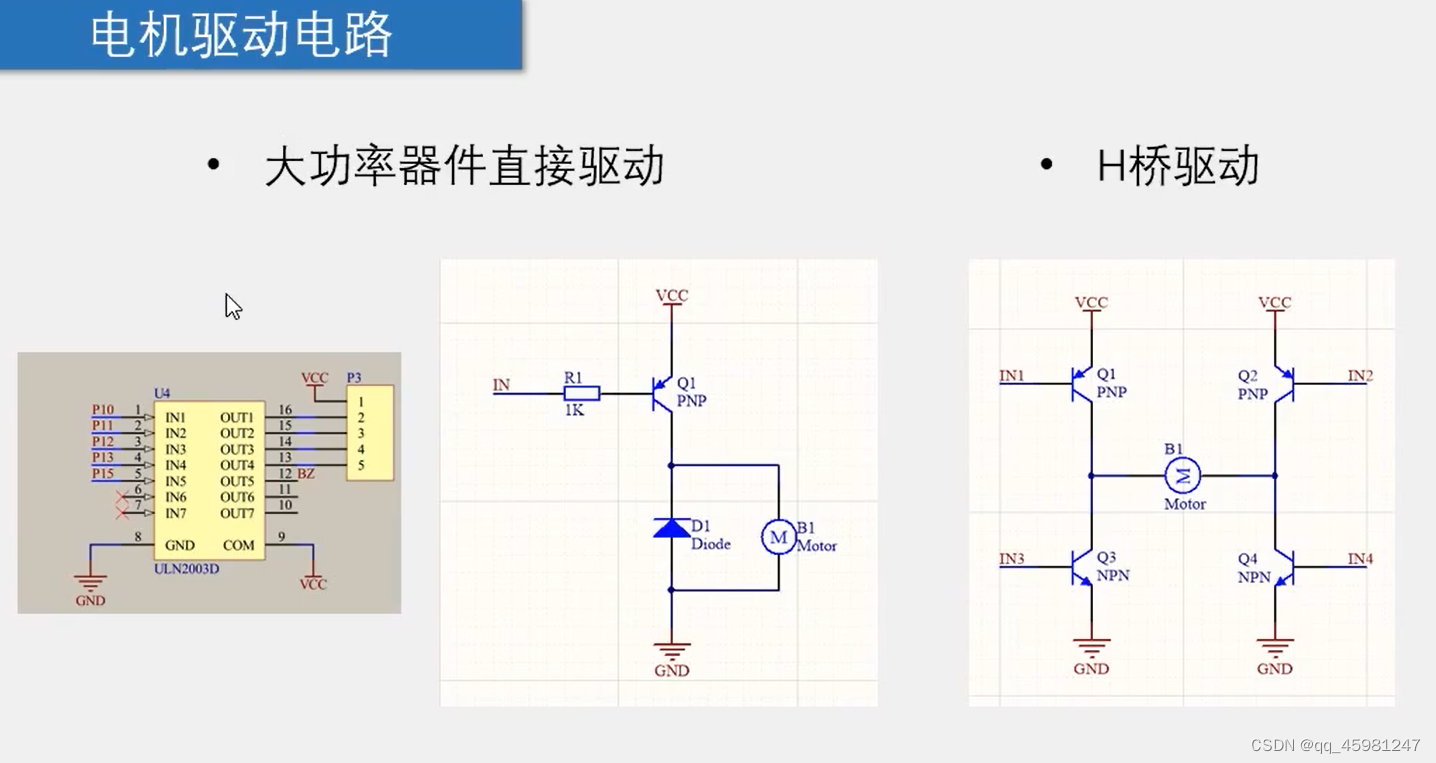
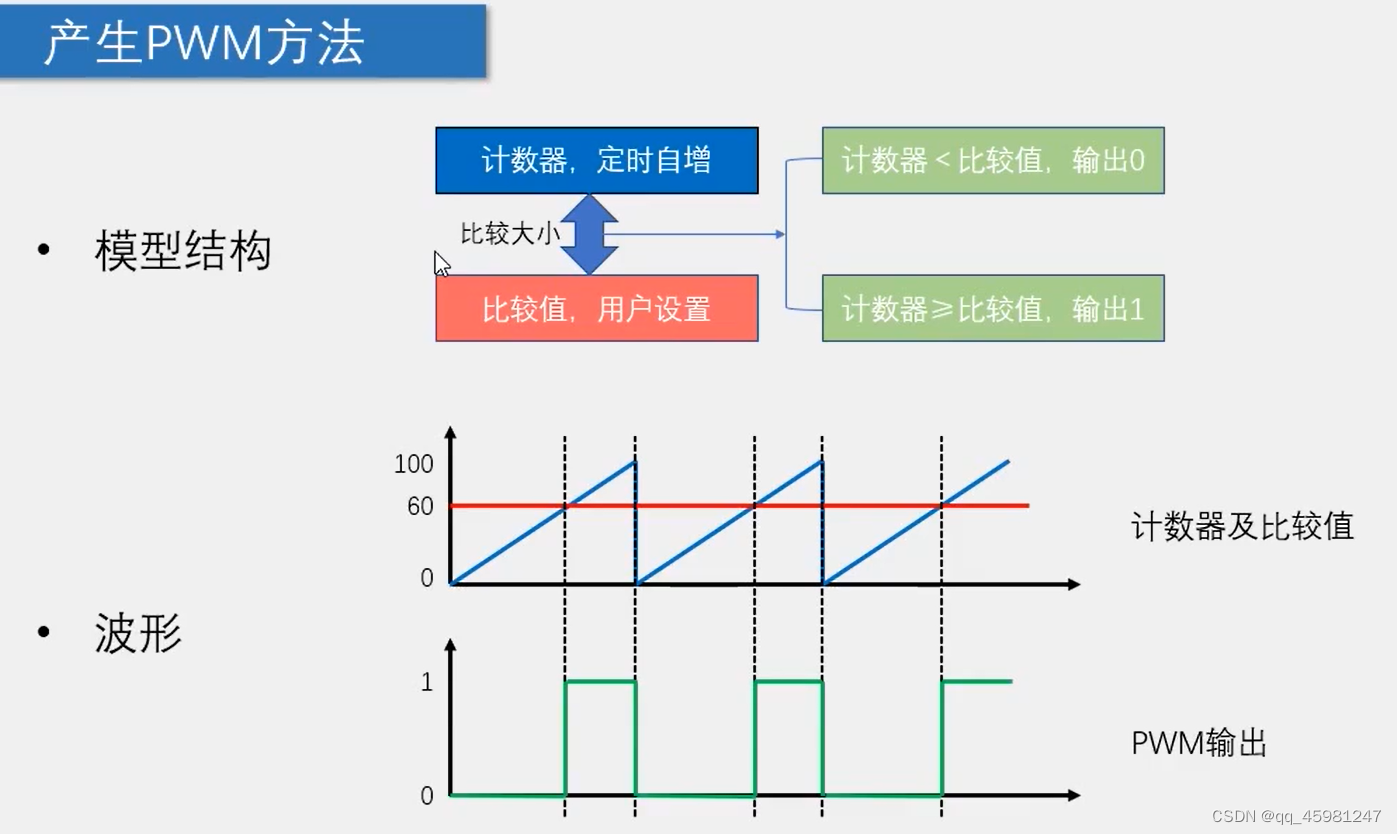
直流电机驱动(PWM)
LED呼吸灯
直流电机调速
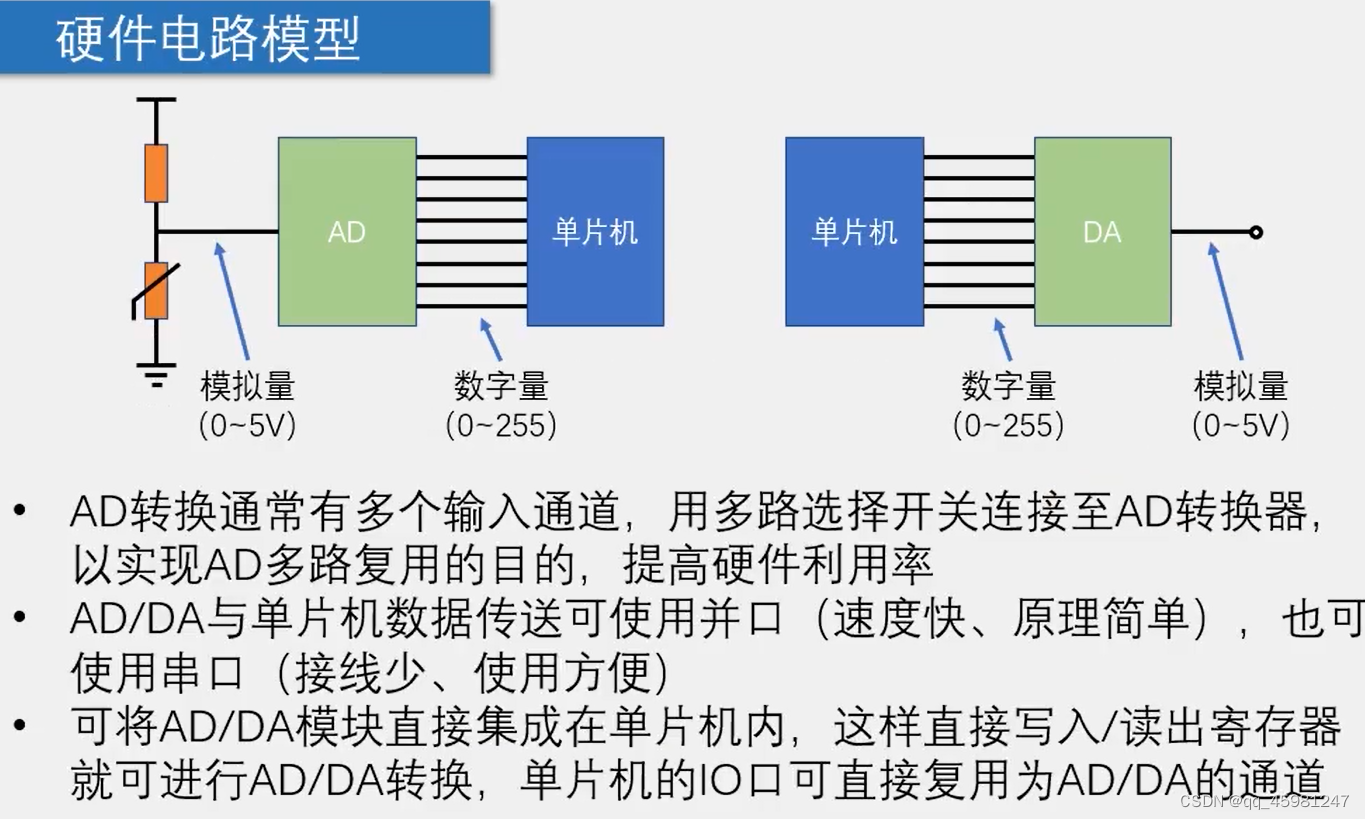
AD/DA(SPI通信)
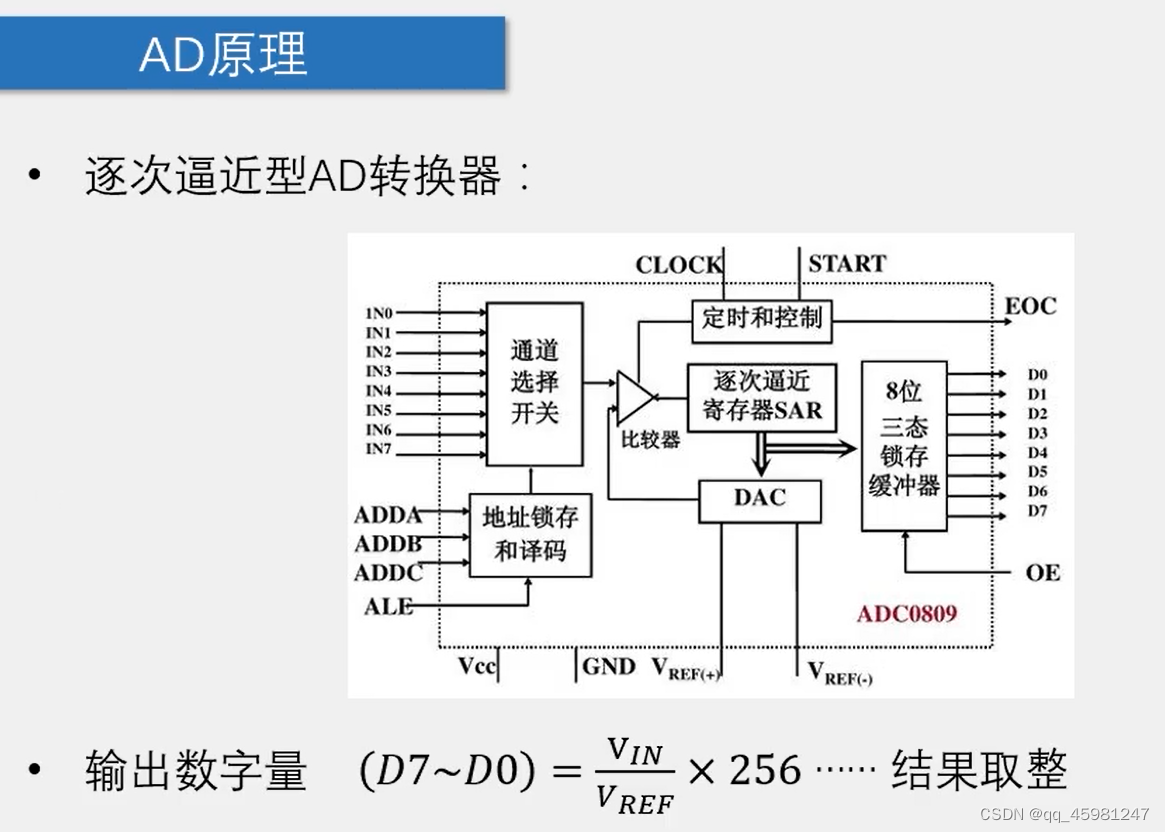
AD模数转换
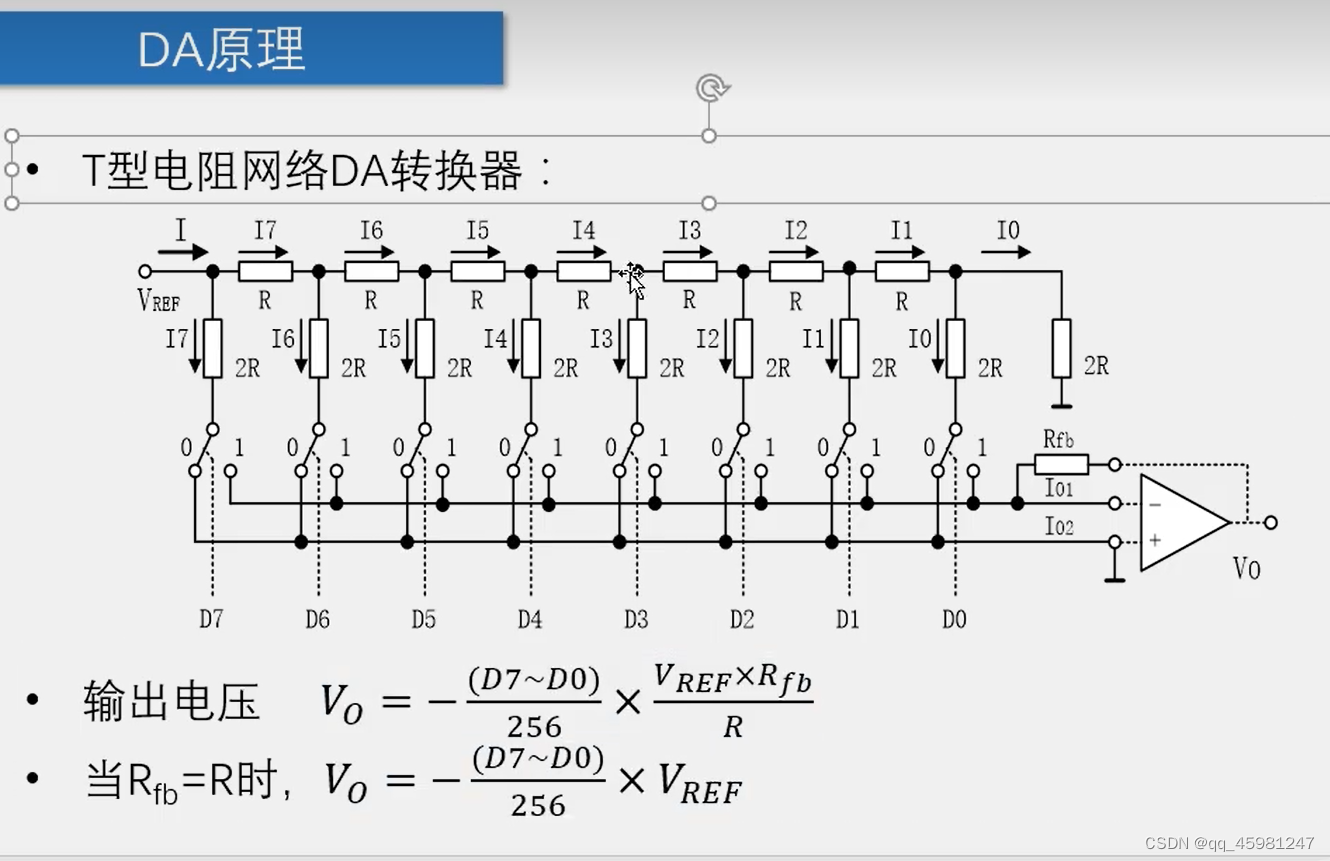
DA数模转换
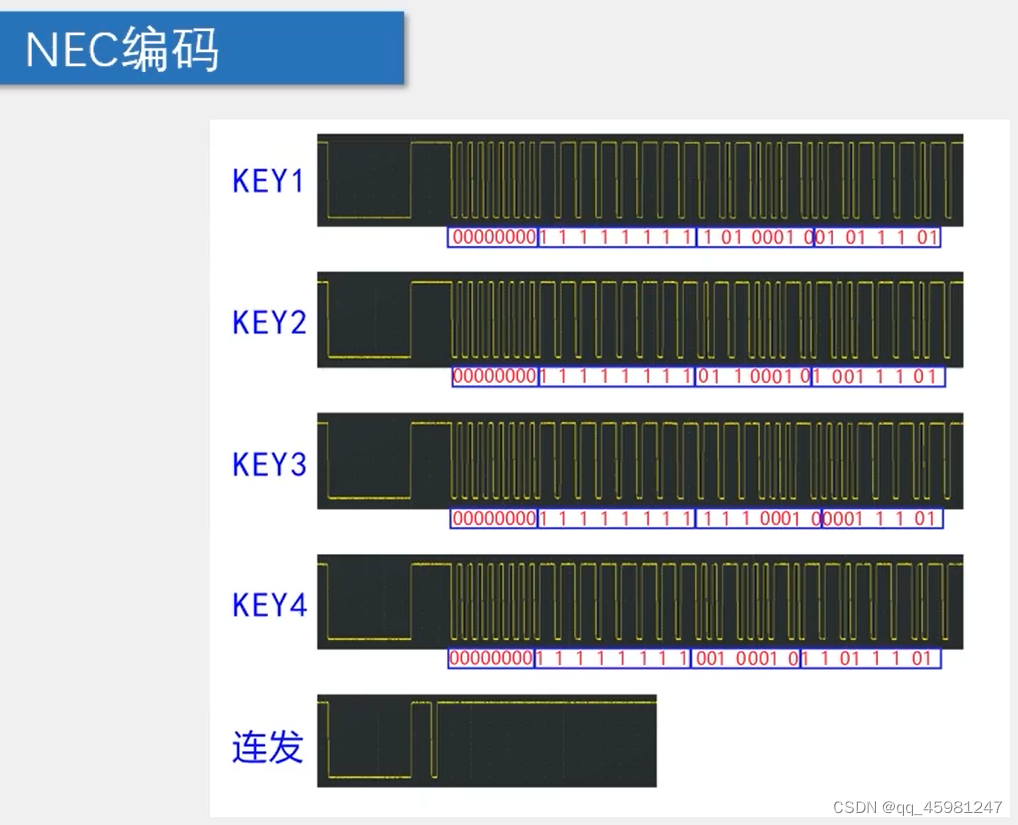
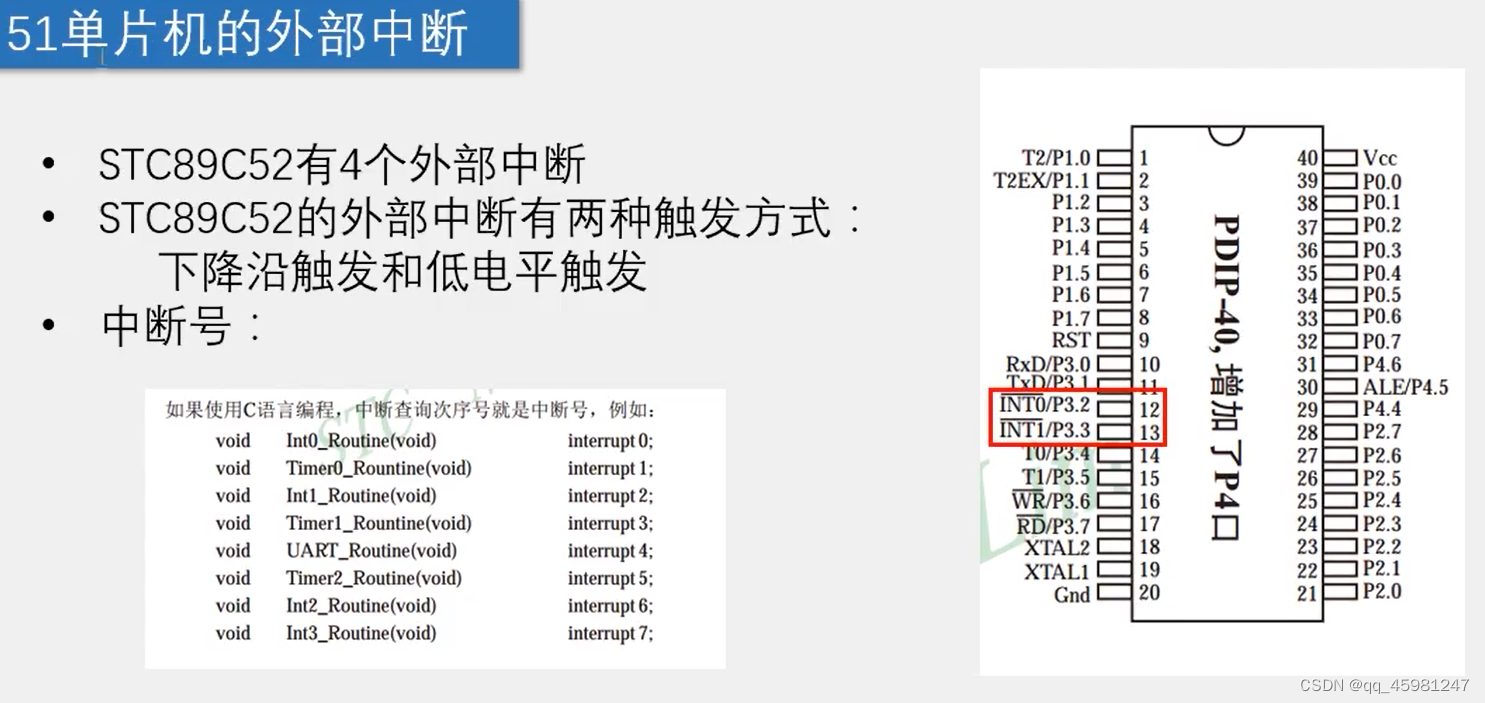
红外遥控(外部中断)
红外遥控
红外遥控电机调速
LCD1602

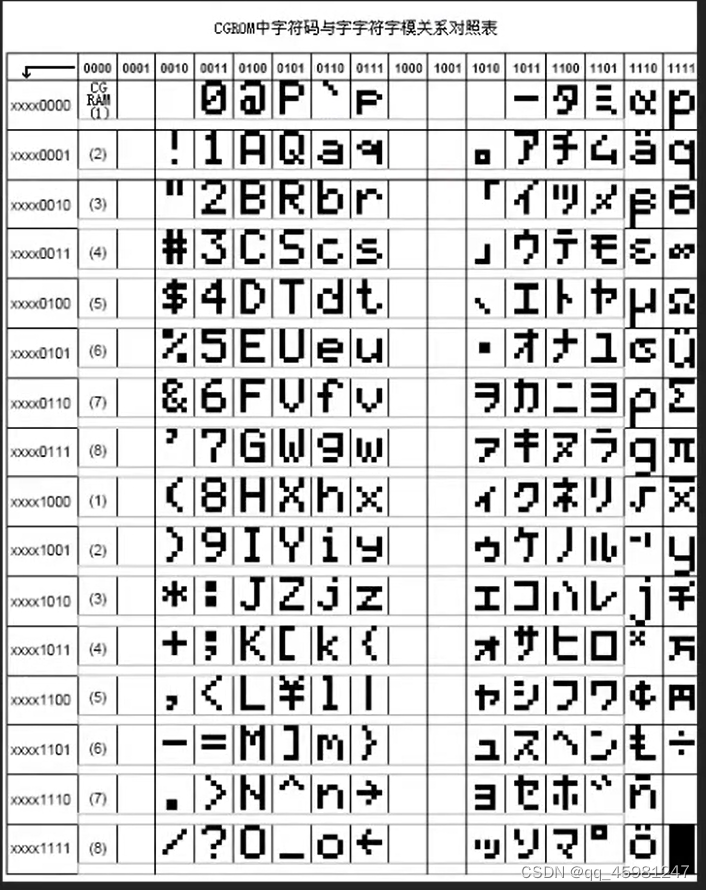




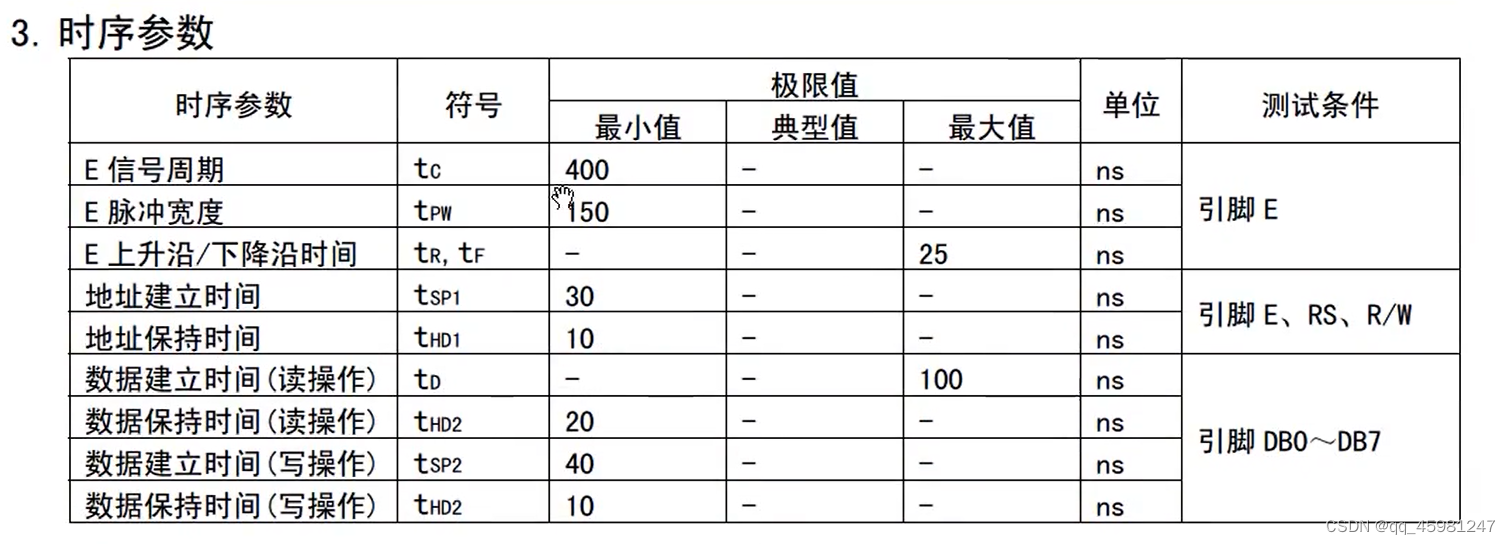
LCD1602液晶显示屏
LCD1602.c
#include <REGX52.H>
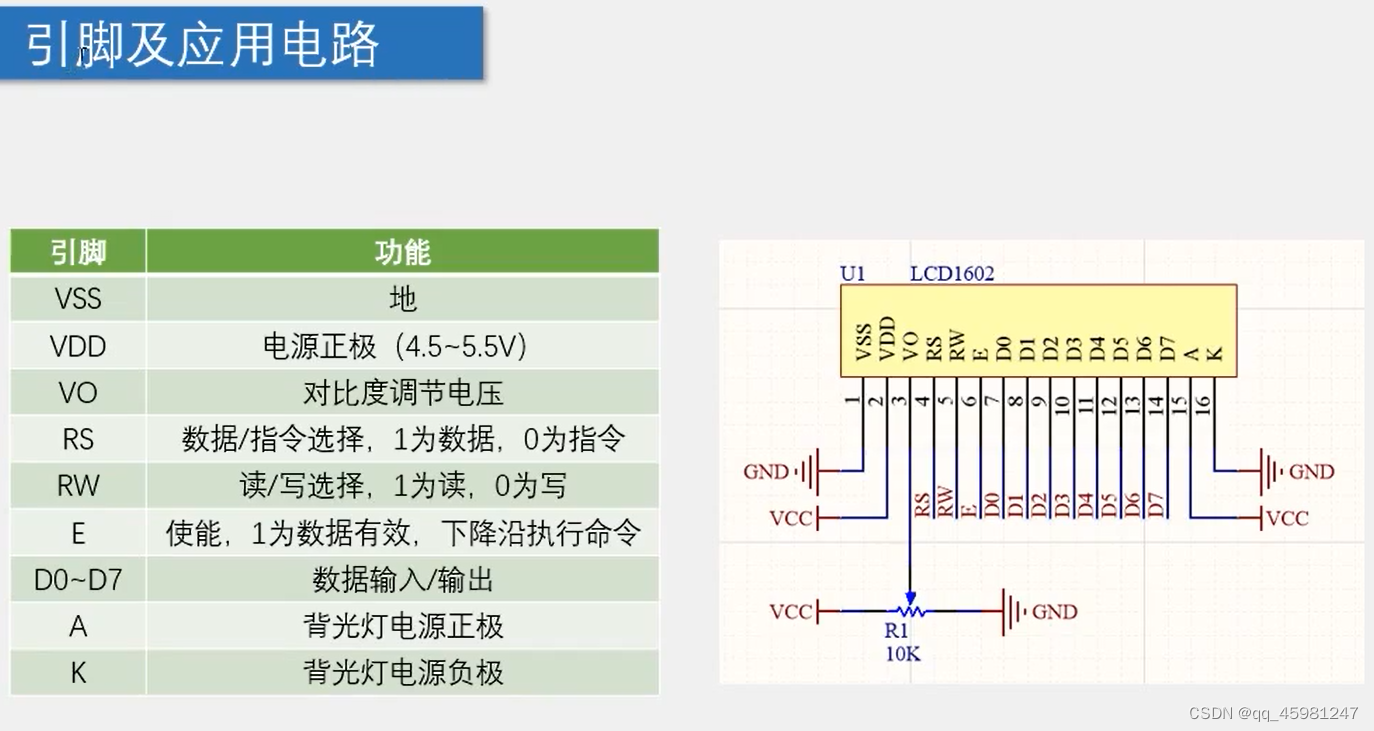
#include "intrins.h"sbit LCD_RS = P2^6;//引脚定义
sbit LCD_WR = P2^5;
sbit LCD_EN = P2^7;#define LCD_DataPort P0//寄存器定义,define不要使用分号void LCD_Delay() //@11.0592MHz,2ms
{unsigned char i, j;_nop_();i = 2;j = 199;do{while (--j) ;} while (--i);
}/*** @brief 写指令* @param Command 指令* @retval 无*/
void LCD_WriteCommand(unsigned char Command)//写指令
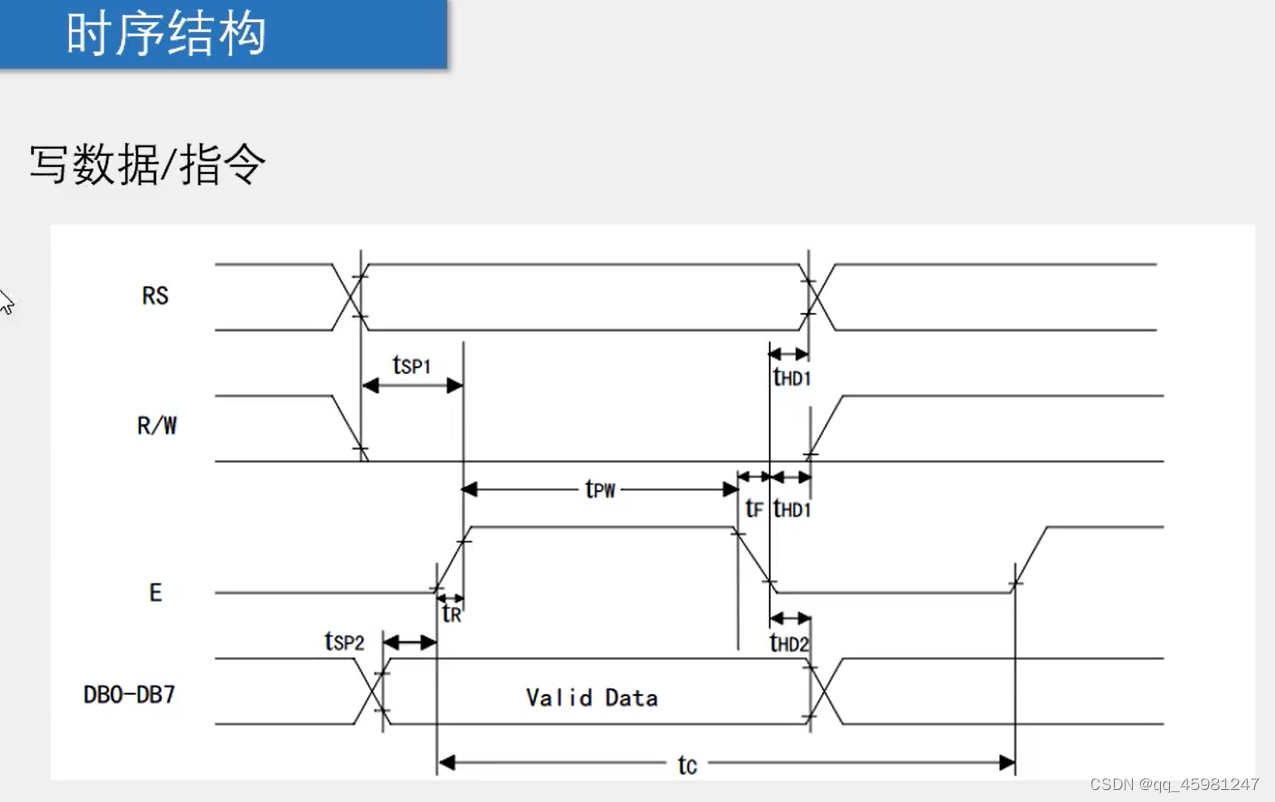
{LCD_RS = 0;//1为数据,0为指令LCD_WR = 0;//1为读,0为写LCD_DataPort = Command;//放入指令LCD_EN = 1;//使能LCD_Delay();//延时一毫秒LCD_EN = 0;//结束使能LCD_Delay();
}/*** @brief 写数据* @param Data 数据* @retval 无*/
void LCD_WriteData(unsigned char Data)//写数据
{LCD_RS = 1;//1为数据,0为指令LCD_WR = 0;//1为读,0为写LCD_DataPort = Data;//放入数据LCD_EN = 1;//使能LCD_Delay();//延时一毫秒LCD_EN = 0;//结束使能LCD_Delay();
}/*** @brief 初始化显示屏* @param 无* @retval 无*/
void LCD_Init(void)
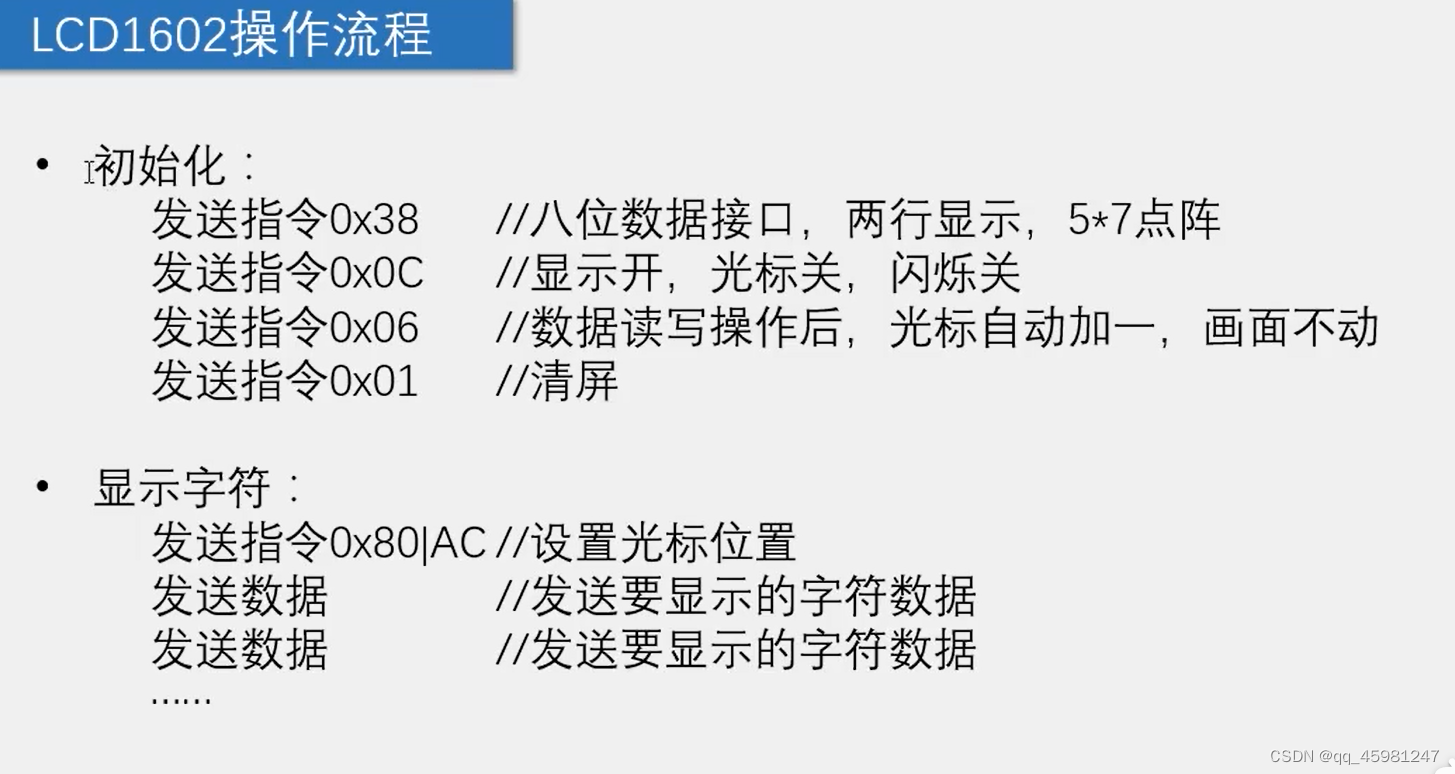
{LCD_WriteCommand(0x38);//八位数据,两行显示,5*7点阵LCD_WriteCommand(0x0C);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//清屏
}/*** @brief 移动光标到目标位置* @param Line行 Column列* @retval 无 */
void LCD_SetCursor(unsigned char Line,unsigned char Column)//设置光标位置
{if(Line == 1){LCD_WriteCommand(0x80|(Column - 1));//如果是第一行,那么实际地址即为列-1,//并设置光标位置,为什么是0x80,地址设置DDRAM}else{LCD_WriteCommand(0x80|(Column - 1) + 0x40);//如果是第二行,则进行偏移0x40即为实际地址//并设置光标位置}
}/*** @brief 显示字符* @param Line 行 * @param Column 列 * @param Char 显示的字符 * @retval 无*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,unsigned char Char)
{LCD_SetCursor(Line,Column);LCD_WriteData(Char);//写入数据
}/*** @brief 显示字符串* @param Line 行 * @param Column 列 * @param String 显示的字符串 * @retval 无*/
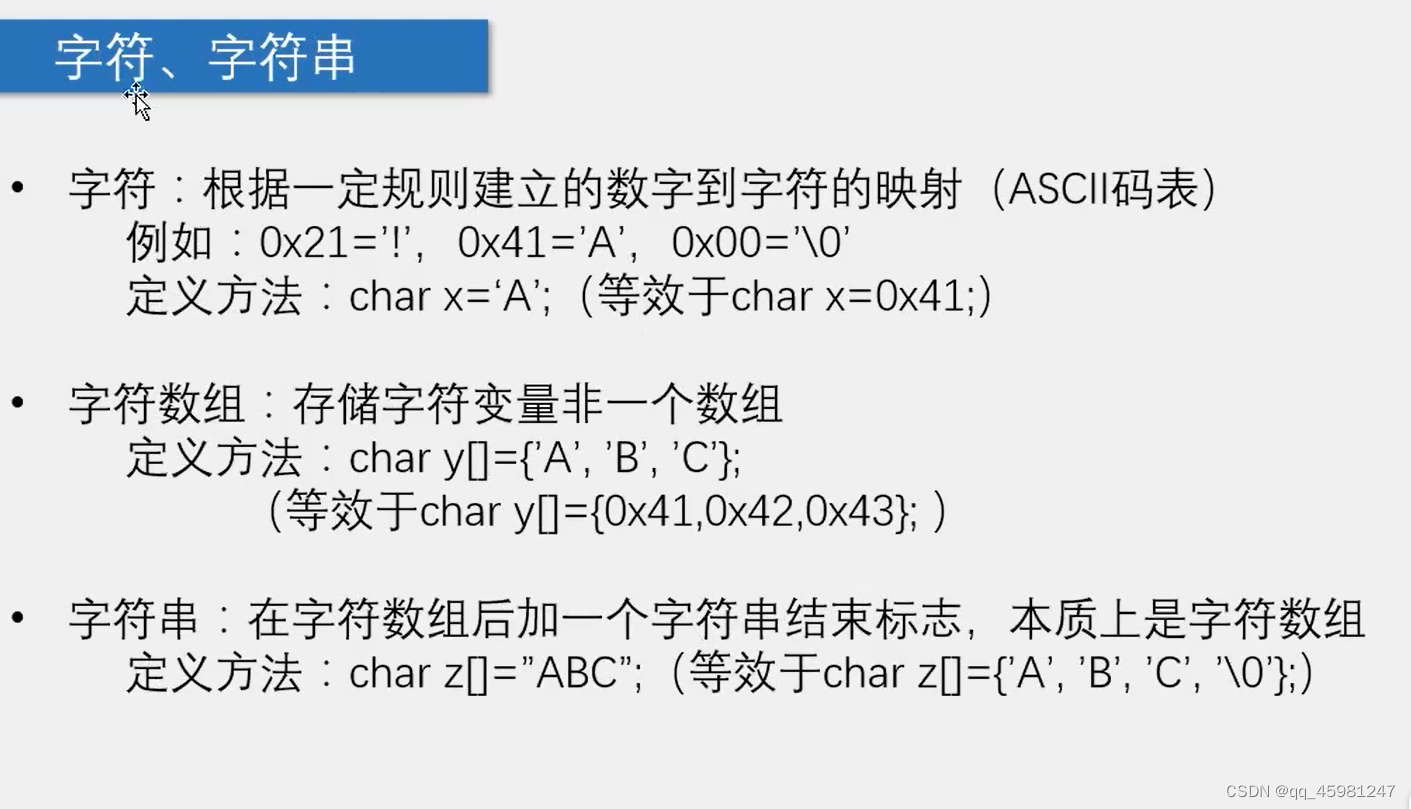
void LCD_ShowString(unsigned char Line,unsigned char Column, unsigned char *String)
{unsigned char i;LCD_SetCursor(Line,Column);for(i = 0;String[i] != '\0';i++)//遍历字符串String{LCD_WriteData(String[i]);//写入数据}
}int LCD_Pow(int X,int Y)
{unsigned char i;int Result = 1;for( i=0;i<Y;i++){Result *= X;//X^Y}return Result;
}/*** @brief 显示无符号数字* @param Line 行 * @param Column 列 * @param Num 显示的无符号数字 * @retval 无*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){//LCD_WriteData(0x30 + Num / LCD_Pow(10,i-1)%10); //获取各位数值并写入显示屏LCD_WriteData('0' + Num / LCD_Pow(10,i-1)%10);//或者转化为ascii码}
}/*** @brief 显示有符号数字* @param Line 行 * @param Column 列 * @param Num 显示的有符号数字 * @retval 无*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Num,unsigned char Len)
{unsigned char i;unsigned int Num1;LCD_SetCursor(Line,Column);if(Num >= 0 ){LCD_WriteData('+');Num1 = Num;}else{LCD_WriteData('-');Num1 = -Num;}for(i=Len ; i>0 ;i--){//LCD_WriteData(0x30 + Num / LCD_Pow(10,i-1)%10); //获取各位数值并写入显示屏LCD_WriteData('0' + Num1 / LCD_Pow(10,i-1)%10);//或者转化为ascii码}
}/*** @brief 显示十六进制数字* @param Line 行 * @param Column 列 * @param Num 显示的十六进制数字 * @retval 无*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;unsigned char SingleNum;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){SingleNum = Num / LCD_Pow(16,i-1)%16;if(SingleNum < 10){LCD_WriteData('0' + SingleNum);//获取各位数值并写入显示屏}else{LCD_WriteData('A' + SingleNum - 10);//修改偏移量}}
}/*** @brief 显示二进制数字* @param Line 行 * @param Column 列 * @param Num 显示的二进制数字 * @retval 无*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){LCD_WriteData('0' + Num / LCD_Pow(2,i-1)%2);}
}#include <REGX52.H>
#include "LCD1602.h"
#include "Delay.h"void main(){LCD_Init();LCD_ShowChar(1,1,'A');//显示字符ALCD_ShowString(1,3,"Hello");//显示字符串LCD_ShowNum(1,9,66,2);//显示无符号数字LCD_ShowSignedNum(1,12,-66,2);//显示有符号数字LCD_ShowHexNum(2,1,0xA5,2);//显示十六进制LCD_ShowBinNum(2,4,0xA5,8);//显示二进制LCD_ShowChar(2,13,0xDF);//显示度数符号LCD_ShowChar(2,14,'C');//显示字符CLCD_ShowString(1,16,"Welcome to China!");while( 1 ){LCD_WriteCommand(0x18);//流动字幕(指令集)Delay(500);}}直流电机驱动(PWM)

LED呼吸灯
main.c
#include <REGX52.H>sbit LED = P2^0;void Delay(unsigned int t)
{while(t--);
}void main(){unsigned char Time,i;while( 1 ){for(Time = 0; Time < 100;Time++){for(i = 0; i < 20;i++){LED = 0;Delay(Time);LED = 1;Delay(100 - Time);}}for(Time = 100; Time > 0;Time--){for(i = 0; i < 20;i++){LED = 0;Delay(Time);LED = 1;Delay(100 - Time);}}}}直流电机调速
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Timer0.h"unsigned char Counter,Compare;
unsigned char KeyNum,Speed;
sbit Motor = P1^0;//ULN2003Dvoid main(){Timer0Init();//Compare值看自己如何设置,主要看与之比较后你想输出高/低电平,//这里是小于输出高电平while( 1 ){KeyNum = Key();if(KeyNum == 1){Speed++;Speed %= 4;//重置为0if(Speed==0){Compare=0;}if(Speed==1){Compare=50;}if(Speed==2){Compare=75;}if(Speed==3){Compare=100;}}Nixie(1,Speed);}}void Timer0_Routine() interrupt 1{TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值
//100us定时器Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){Motor = 1;//高电平转}else{Motor = 0;}
}AD/DA(SPI通信)



AD模数转换
ET2046.c
#include <REGX52.H>
#include "Delay.h"sbit ET2046_CS = P3^5;
sbit ET2046_DCLK = P3^6;
sbit ET2046_DIN = P3^4;
sbit ET2046_DOUT = P3^7;/*** @brief 相当于当过电阻变化,来输出一些数据* @param Command 控制字* @retval ADValue 读取到的数据*/
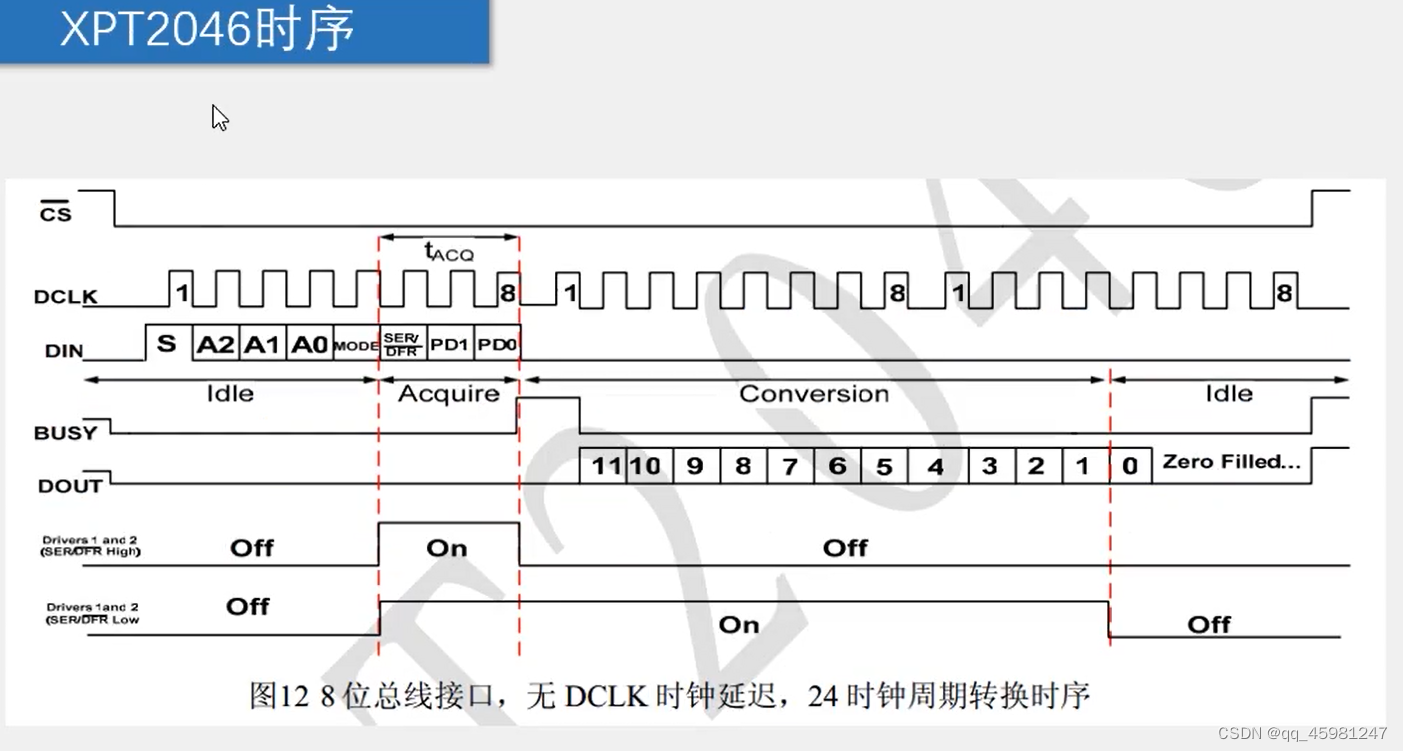
unsigned int ET2046_ReadAD(unsigned char Command)//控制字
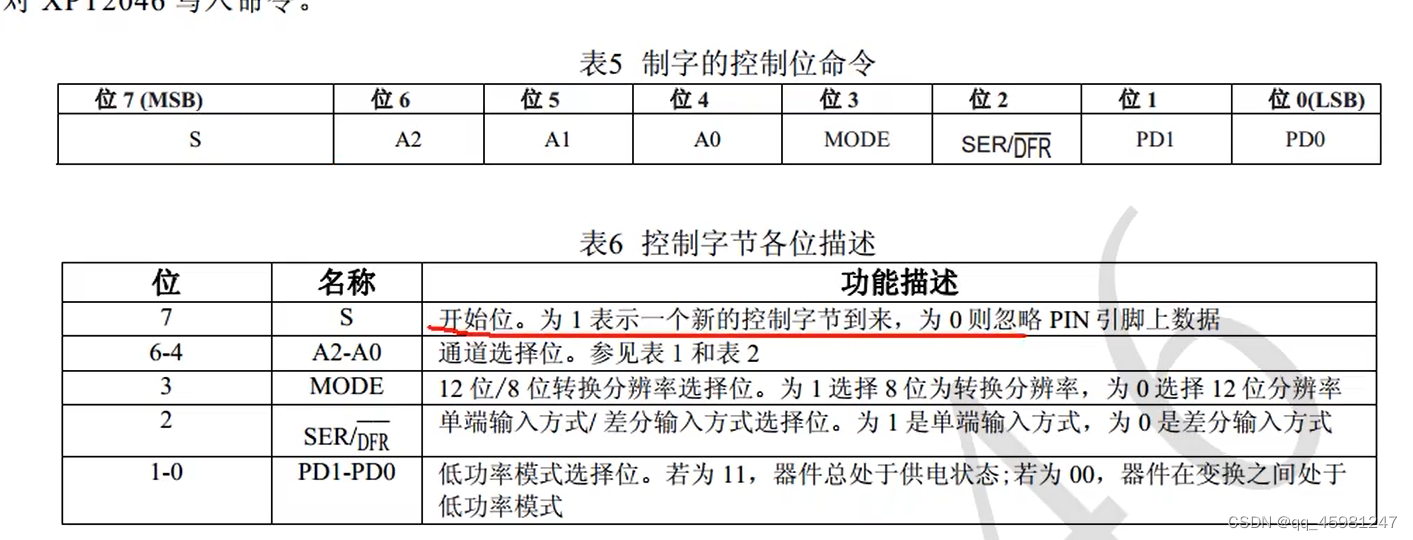
{unsigned char i;unsigned int ADValue = 0;ET2046_DCLK = 0;ET2046_CS = 0;//拉低进入时序for(i = 0; i<8 ; i++)//发送一个字节{ET2046_DIN = Command & (0x80 >> i);//获得最高位并将其放入DINET2046_DCLK = 1;ET2046_DCLK = 0;}for(i = 0; i < 16;i++)//读取两个字节长度{ET2046_DCLK = 1;ET2046_DCLK = 0;if(ET2046_DOUT){ADValue |= (0x8000>>i);//提前给三位}Delay(50);}ET2046_CS = 1;//结束时序if(Command & 0x08)//查看为什么模式,若得出为1,则是12位。0则为8位{return ADValue>>8;}else{return ADValue>>4;}
}ET2046.h
#ifndef __ET2046_H__
#define __ET2046_H__#define ET2046_XP_8 0x9C//0x8C
#define ET2046_YP_8 0xDC
#define ET2046_VBAT_8 0xAC
#define ET2046_AUX_8 0xEC#define ET2046_XP_12 0x94//0x84
#define ET2046_YP_12 0xD4
#define ET2046_VBAT_12 0xA4
#define ET2046_AUX_12 0xE4unsigned int ET2046_ReadAD(unsigned char Command);
#endifmain.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Delay.h"
#include "ET2046.h"unsigned int ADValue;void main(){LCD_Init();LCD_ShowString(1,1,"ADJ NTC RG");while( 1 ){ADValue = ET2046_ReadAD(ET2046_XP_8);//XPLCD_ShowNum(2,1,ADValue,3);ADValue = ET2046_ReadAD(ET2046_YP_8);//YPLCD_ShowNum(2,6,ADValue,3);ADValue = ET2046_ReadAD(ET2046_VBAT_8);//LCD_ShowNum(2,11,ADValue,3);Delay(10);}}DA数模转换
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Timer0.h"unsigned char Counter,Compare;sbit DA = P2^1;//DAunsigned char i;
void main(){Timer0Init();//Compare值越小LED越暗while( 1 ){for(i = 0;i < 100;i++){Compare = i;Delay(10);}for(i = 100;i > 0;i--){Compare = i;Delay(10);}}}void Timer0_Routine() interrupt 1{TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){DA = 1;}else{DA = 0;}
}红外遥控(外部中断)



红外遥控
Int0.c
#include <REGX52.H>/*** @brief 外部中断0初始化* @param 无* @retval 无*/
void Int0_Init(void)
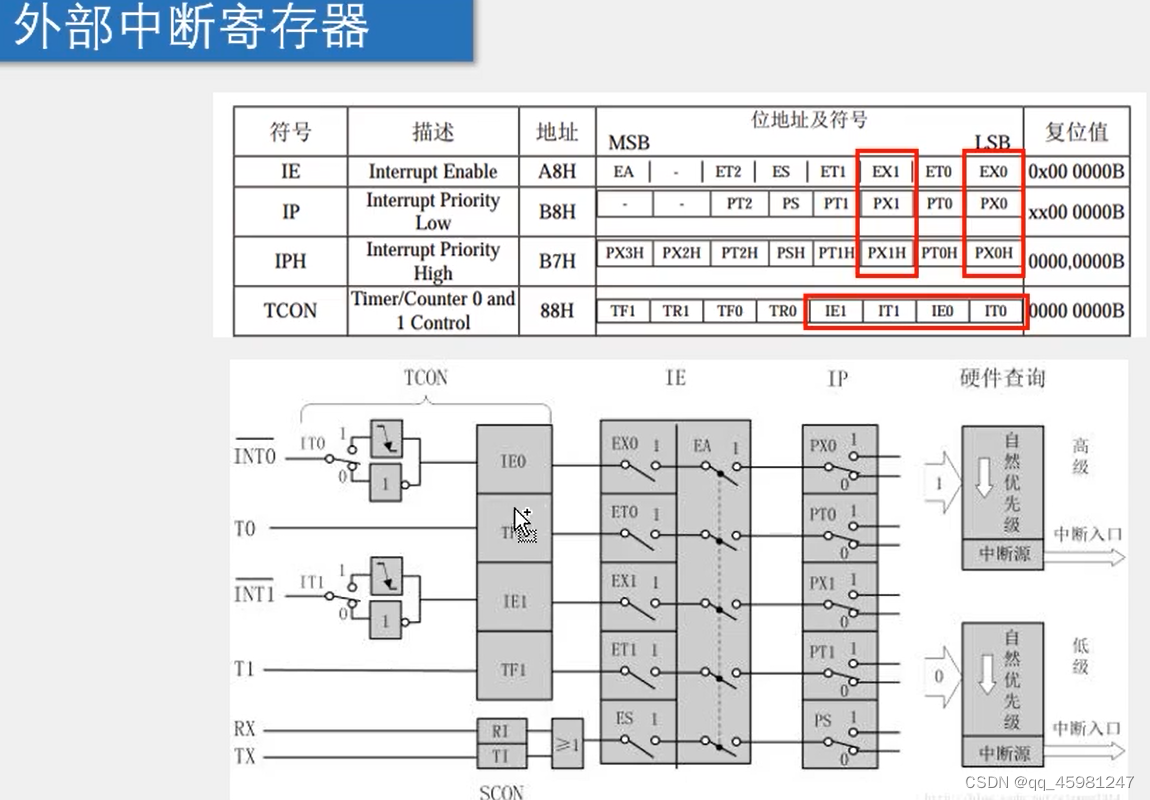
{IT0 = 1;//1下降沿触发,0低电平触发IE0 = 0;//中断标志EX0 = 1;//打开中断EA = 1;//允许所有中断PX0 = 1;//中断优先级
}/*外部中断0函数模板
void Int0_Routine(void) interrupt 0
{Num++;} */
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void) //1微秒@12.000MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0开始计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0 = Value / 256;TL0 = Value % 256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0 << 8 )| TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0 = Flag;
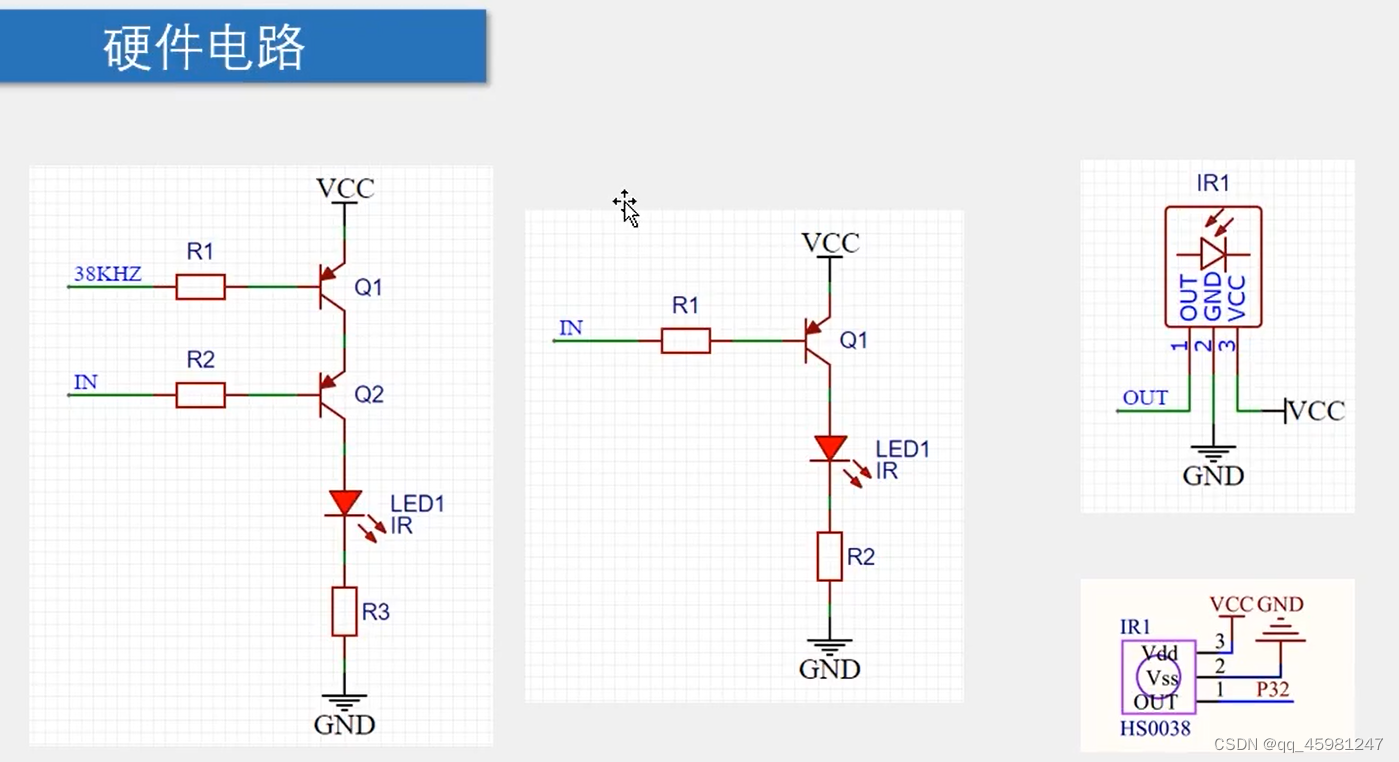
}IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];//数据缓存
unsigned char IR_PData;//指向当前位置unsigned char IR_DataFlag;//结束位
unsigned char IR_RepeatFlag;//重置位
unsigned char IR_Address;//地址码
unsigned char IR_Command;//变量码/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag = 0;//清零return 1;//代表收到}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag = 0;//清零return 1;//代表收到}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
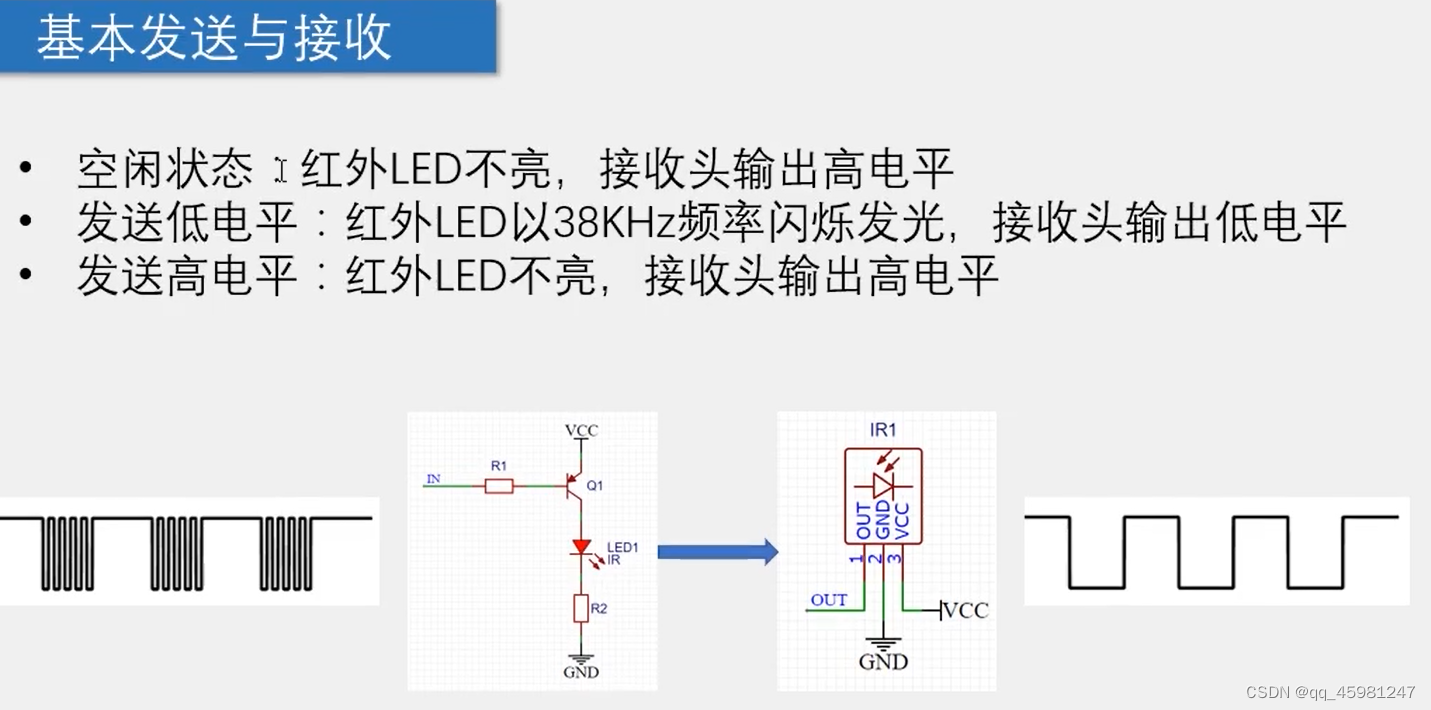
}void Int0_Routine(void) interrupt 0
{if(IR_State == 0)//状态0,下降沿触发{Timer0_SetCounter(0);//定时器清零Timer0_Run(1);//定时器启动IR_State = 1;//调整状态为1}else if(IR_State == 1)//为状态1时,等待Start信号或Repeat信号{IR_Time = Timer0_GetCounter();//获取上次中断到此次中断的时间Timer0_SetCounter(0);//便于下次计时if(IR_Time > 12442 - 500 && IR_Time < 12442 + 500 ){IR_State = 2;//置状态为2}else if(IR_Time > 10368 - 500 && IR_Time < 10368 + 500)//接收到Repeat信号{IR_RepeatFlag = 1;//连发帧标志为1Timer0_Run(0);//停止计时器IR_State = 0;//转为空闲}else{IR_State = 1;//搜寻起始信号}}else if(IR_State == 2)//状态2,接收数据{IR_Time = Timer0_GetCounter();Timer0_SetCounter(0);//获得上个中断到这个中断之间的时间,并立即清零if(IR_Time > 1032 - 500 && IR_Time < 1032 + 500 )//如果接收到0{IR_Data[IR_PData/8] &= ~(0x01<<(IR_PData % 8));//将数据存入IR_Data中(32位),对应数据置0IR_PData++;//位置指针自增}else if(IR_Time > 2250 - 500 && IR_Time < 2250 + 500 )//如果接收到1{IR_Data[ IR_PData / 8] |= (0x01<<(IR_PData % 8));//将数据对应位置置1,将数据存入IR_Data中IR_PData++;}else{IR_PData = 0;//数据位置指针清零IR_State = 1;//搜寻起始信号}if(IR_PData >= 32)//如果接收到32位数据{IR_PData = 0;//数据位置指针清零if((IR_Data[0] == ~IR_Data[1]) && (IR_Data[2] == ~IR_Data[3]))//数据验证{IR_DataFlag = 1;IR_Address = IR_Data[0];//存入地址码IR_Command = IR_Data[2];//存入命令码IR_DataFlag = 1;//接收到数据}Timer0_Run(0);//停止定时器IR_State = 0;//恢复空闲}}
} main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main(){LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init();while( 1 ){if(IR_GetDataFlag() || IR_GetRepeatFlag())//如果收到数据帧或者连续发送{Address = IR_GetAddress();//获取遥控器地址码Command = IR_GetCommand();//获取遥控器命令码LCD_ShowHexNum(2,1,Address,2);//显示遥控器地址码LCD_ShowHexNum(2,8,Command,2);//显示遥控器命令码if(Command == IR_VOL_MINUS)//如果遥控器VOL-按键按下{Num --;}if(Command ==IR_VOL_ADD)//如果遥控器VOL+按键按下{Num ++;}LCD_ShowNum(2,14,Num,3);}}}
红外遥控电机调速
Timer1.c
#include <REGX52.H>/*** @brief 定时器1初始化,100微秒* @param 无* @retval 无*/
void Timer1Init(void) //100微秒@11.0592MHz
{TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10; //设置定时器模式TL1 = 0xA4; //设置定时初值TH1 = 0xFF; //设置定时初值TF1 = 0; //清除TF1标志TR1 = 1; //定时器1开始计时ET1 = 1; EA = 1;PT1 = 0;
}/* 定时器中断函数模板
void Timer1_Routine() interrupt 3{static unsigned int T1Count;TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值T1Count ++;if( T1Count >= 1000 ){T1Count = 0;}}
*/Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void) //1微秒@12.000MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0开始计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0 = Value / 256;TL0 = Value % 256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0 << 8 )| TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0 = Flag;
}Motor.c
#include <REGX52.H>
#include "Timer1.h"sbit Motor = P1^0;//ULN2003D
unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init()
{Timer1Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare = Speed;
}void Timer1_Routine() interrupt 3{TL1 = 0xA4; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){Motor = 1;//高电平转}else{Motor = 0;}
}main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main(){Motor_Init();IR_Init();while( 1 ){if(IR_GetDataFlag())//如果收到数据帧{Command = IR_GetCommand();//获取遥控器命令码if(Command == IR_0){Speed = 0;} //根据遥控器命令码设置速度if(Command == IR_1){Speed = 1;}if(Command == IR_2){Speed = 2;}if(Command == IR_3){Speed = 3;}if(Speed==0){Motor_SetSpeed(0);}//速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed);}}相关文章:
单片机14-17
目录 LCD1602 LCD1602液晶显示屏 直流电机驱动(PWM) LED呼吸灯 直流电机调速 AD/DA(SPI通信) AD模数转换 DA数模转换 红外遥控(外部中断) 红外遥控 红外遥控电机调速 LCD1602 LCD1602液晶显示屏 …...
)
DAY_12(树链剖分)
中途摆烂了几天加上考试比赛啥的,导致目前写博客断了。。差了好几天的题目没学了qwq,现在还是按照每天学的东西来写博客吧 今天主要学了树链剖分,怎么说呢,虽然随便拿出今天写的一道题目来看,码量都是一两百行的&…...
 | Column,Row - 线性布局)
Compose | UI组件(九) | Column,Row - 线性布局
文章目录 前言Column 的含义Column 的使用给 Column 加边框Column 使用 verticalArrangement 定位子项位置Column 使用 horizontalAlignment 定位子组件位置Column 设置了大小,可使用Modifier.align修饰符设置子组件对齐方式 Row 的含义Row 的使用 总结 前言 传统的…...
QT+VS实现Kmeans++
1、Kmeans的原理如下: (1)首先选取样本中任一数据点作为第一个聚类中心; (2)计算样本每一个数据点至现所有聚类中心的最近距离,并记录下来; (3)逐一挑选所…...

上位机图像处理和嵌入式模块部署(算法库的编写)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 作为图像处理的engineer来说,有时候我们需要提供上位机软件,有时候需要提供下位机程序,还有一种情况࿰…...

LeetCode1504. Count Submatrices With All Ones
文章目录 一、题目二、题解 一、题目 Given an m x n binary matrix mat, return the number of submatrices that have all ones. Example 1: Input: mat [[1,0,1],[1,1,0],[1,1,0]] Output: 13 Explanation: There are 6 rectangles of side 1x1. There are 2 rectangles…...
信息系统项目管理(第四版)(高级项目管理)考试重点整理第8章 项目整合管理(九))
(每日持续更新)信息系统项目管理(第四版)(高级项目管理)考试重点整理第8章 项目整合管理(九)
博主2023年11月通过了信息系统项目管理的考试,考试过程中发现考试的内容全部是教材中的内容,非常符合我学习的思路,因此博主想通过该平台把自己学习过程中的经验和教材博主认为重要的知识点分享给大家,希望更多的人能够通过考试&a…...

帕金森早期诊断准确率提高至 90.2%,深圳先进院联合中山一院提出 GSP-GCNs 模型
中山大学附属第一医院&中科大先进院等研究团队,提出了一种深度学习模型——图信号处理-图卷积网络 (GSP-GCNs),利用从涉及声调调节的特定任务中获得的事件相关脑电图数据来诊断帕金森病。 震颤、动作迟缓、表情僵硬……提起帕金森病,多数…...
java servlet果蔬产业监管系统Myeclipse开发mysql数据库web结构java编程计算机网页项目
一、源码特点 java Web果蔬产业监管系统是一套完善的java web信息管理系统 serlvetdaobean mvc 模式开发 ,对理解JSP java编程开发语言有帮助,系统具有完整的源代码和数据库,系统主 要采用B/S模式开发。开发环境为TOMCAT7.0,Myeclipse8.5…...
Flask 入门
1. 关于 Flask Flask诞生于2010年, Armin Ronacher的一个愚人节玩笑。不过现在已经是一个用python语言基于Werkzeug工具箱编写的轻量级web开发框架,它主要面向需求简单,项目周期短的小应用。 Flask本身相当于一个内核,其他几乎所…...

微信小程序Skyline在手机端不渲染的问题之一及其解决方式
问题:电脑端是skyline渲染,手机端是webview渲染?如何解? 开发者工具 当前渲染模式:Skyline 当进行预览时手机端却是: 请注意看轮播图的显示情况 请注意看轮播图的显示情况 请注意看轮播图的显示情况 从轮播图上来看,手机端是webview渲染…...
怎样做好Code Review
Code Review方案 定义 Code Review代码评审是指在软件开发过程中,通过对源代码进行系统性检查的过程。通常的目的是查找各种缺陷,包括代码缺陷、功能实现问题、编码合理性、性能优化等;保证软件总体质量和提高开发者自身水平 code review …...
臻于至善,CodeArts Snap 二维绘图来一套不?
前言 我在体验 华为云的 CodeArts Snap 时,第一个例子就是绘制三角函数图像,功能注释写的也很简单。 业务场景中,有一类就是需要产出各种二维图形的,比如,折线图、散点图、柱状图等。 为了提前积累业务素材…...
STM32学习笔记(二) —— 调试串口
我们在调试程序时,经常会使用串口打印相关的调试信息,但是单片机串口不能直接与 PC 端的 USB 接口通讯,需要用到一个USB转串口的芯片来充当翻译的角色。我们使用的开发板上有这个芯片,所以在打印调试信息的时候直接使用USB线连接开…...

Ubuntu20.0.4下设置frpc开机自启动
目录 一、下载frp 二、解压 三、服务端部署 1.配置 2.运行 三、客户端部署 1、配置 2、后台运行 四、开机启动 1、拷贝frpc.service 2、修改配置 3、启用服务 五、ubuntu20.04使用 rc-local.service设置开机启动 1、建立开机服务添加 [Install] 段 2、授权rc-local.service 3、…...
05 Redis之Benchmark+简单动态字符串SDS+集合的底层实现
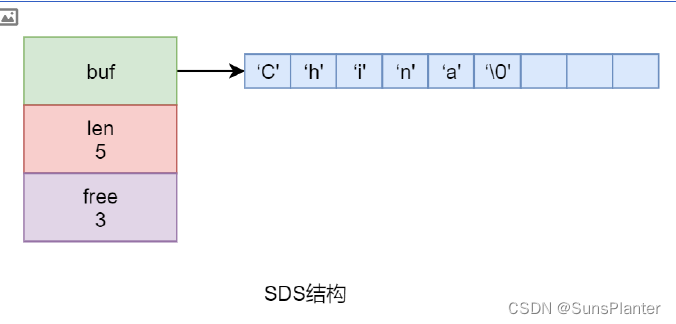
3.8 Benchmark Redis安装完毕后会自动安装一个redis-benchmark测试工具,其是一个压力测试工具,用于测试 Redis 的性能。 src目录下可找到该工具 通过 redis-benchmark –help 命令可以查看到其用法 3.8.1 测试1 3.9 简单动态字符串SDS 无论是 Redis …...

【C++】priority_queue优先队列
头文件#include <queue> 优先队列具有队列的所有特性,本质是一个堆实现的,和队列基本操作相同: top 访问队头元素 empty 队列是否为空 size 返回队列内元素个数 push 插入元素到队尾 (并排序) emplace 原地构造一个元素并插入队列 pop 弹出队头元素…...

蓝桥杯---三国游戏
问题描述 小蓝正在玩一款游戏。游戏中魏蜀吴三个国家各自拥有一定数量的士兵 X, Y, Z (一开始可以认为都为 0 )。游戏有 n 个可能会发生的事件,每个事件之 间相互独立且最多只会发生一次,当第 i 个事件发生时会分别让 X, Y, Z 增加 Ai , Bi ,Ci 。…...

设计一个分布式ID
为了保证全局唯一性可以用时间作为区分点一部分,时间尽可能细化,可以精确到毫秒,甚至是微秒和纳秒。如果是分布式系统有多态机器,可以根据机器ID再进行以下区分。如哦机器运行的特别快,1毫秒有大量ID生成,可…...

259:vue+openlayers: 显示海量多边形数据,10ms加载完成
第259个 点击查看专栏目录 本示例的目的是介绍演示如何在vue+openlayers项目中通过WebGLVectorLayerRenderer方式加载海量多边形数据。这里相当于将海量的数据放在同一个层的source中,然后通过webglTile的方式渲染出这一层。 本示例数据为5000个多边形,加载速度超级快。 直接…...

保姆级教程:用iSYSTEM winIDEA和iC5000给S32K148烧录程序,附完整配置流程
从零掌握iSYSTEM工具链:S32K148开发板烧录与调试全流程实战第一次接触iSYSTEM的winIDEA和iC5000仿真器时,很多嵌入式开发者都会感到无从下手。不同于常见的开源工具链,这套专业级开发环境在汽车电子和工业控制领域有着广泛应用,尤…...
)
Windows 10/11系统下,SecureCRT 8.7.2保姆级安装与激活图文指南(含Keygen使用避坑点)
Windows平台SecureCRT 8.7.2全流程部署与安全配置指南在当今远程运维与网络管理的日常工作中,一款可靠的终端仿真工具如同工程师的瑞士军刀。作为行业标杆的SecureCRT,其8.7.2版本在Windows 10/11环境下的部署却常让新手陷入各种技术陷阱——从安装路径选…...

13456
12356...
)
别再用SonarQube凑数了!DeepSeek原生圈复杂度引擎的6大颠覆性能力(含GitHub私有部署密钥)
更多请点击: https://kaifayun.com 第一章:DeepSeek圈复杂度分析的底层原理与范式革命 DeepSeek圈复杂度分析并非传统McCabe度量的简单复刻,而是基于控制流图(CFG)动态重构与语义感知路径裁剪的双重机制构建的新范式。…...

[智能体-81]:工程化智能体 = 模型做脑力拆解 + 框架做流程落地。前者是决策者,后者是管理者,tools/function call是内部员工;mcp server是外部资源;
一、全角色人设 & 对应技术组件角色定位对应技术模块核心职责决策者(脑力大脑)大模型 LLM理解目标、任务拆解、逻辑判断、分支决策、内容生成,负责 “想方案、定步骤”管理者(流程总管)智能体编排框架(…...

基于可解释机器学习的城市人口流动空间降尺度分析实践
1. 项目概述:从宏观到微观,解码城市脉搏在城市的肌理中,人口的流动如同血液的循环,承载着经济活力、社会互动与空间结构的全部信息。无论是城市规划师优化公交线路,还是商业分析师评估店铺选址,亦或是公共卫…...

谷氨酸发酵过程的软测量建模【附模型】
✨ 长期致力于软测量、谷氨酸发酵、动力学模型、支持向量机、高斯过程、变量选择、异常状态研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)多阶段高斯…...

【DeepSeek漏洞扫描辅助实战指南】:20年安全专家亲授3大避坑法则与5步提效流程
更多请点击: https://intelliparadigm.com 第一章:DeepSeek漏洞扫描辅助的核心价值与适用边界 DeepSeek漏洞扫描辅助并非通用型渗透测试引擎,而是一个聚焦于大语言模型(LLM)应用层安全的轻量级分析工具。其核心价值在…...

告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南
告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南第一次点击"打包项目"按钮时,进度条仿佛被冻结的场景,每个UE5开发者都经历过。尤其当项目规模达到数十GB时,等待时间可能超过一小时——这背后隐藏着引擎底…...

深度解析:UI-TARS视觉语言模型驱动的自动化操作框架核心技术架构
深度解析:UI-TARS视觉语言模型驱动的自动化操作框架核心技术架构 【免费下载链接】UI-TARS-desktop The Open-Source Multimodal AI Agent Stack: Connecting Cutting-Edge AI Models and Agent Infra 项目地址: https://gitcode.com/GitHub_Trending/ui/UI-TARS-…...