linux 进程及调度基础知识
引用
Linux进程管理专题
Linux进程管理与调度-之-目录导航
Linux下0号进程的前世(init_task进程)今生(idle进程)----Linux进程的管理与调度(五)
蜗窝科技-进程管理
郭健: Linux进程调度技术的前世今生之“前世”
郭健: Linux进程调度技术的前世今生之“今生”
宋宝华:Linux的任督二脉——进程调度和内存管理
深度讲解Linux内存管理和Linux进程调度-打通任督二脉
宋宝华: Linux僵尸进程可以被“杀死”吗?
宋宝华: 聊一聊进程深度睡眠的TASK_KILLABLE这个状态
宋宝华: 关于Linux进程优先级数字混乱的彻底澄清
Linux进程优先级和nice值
Linux的进程线程及调度
Linux内核学习笔记(6)-- 进程优先级详解(prio、static_prio、normal_prio、rt_priority)
调度器简介,以及Linux的调度策略
理解Linux内核抢占模型(最透彻一篇)
灵魂拷问之调度与切换十六问
进程调度
内核基础设施——per cpu变量 - Notes about linux and my work (laoqinren.net)
#Linux进程管理 (qq.com)
一. 进程基础知识
1.1进程
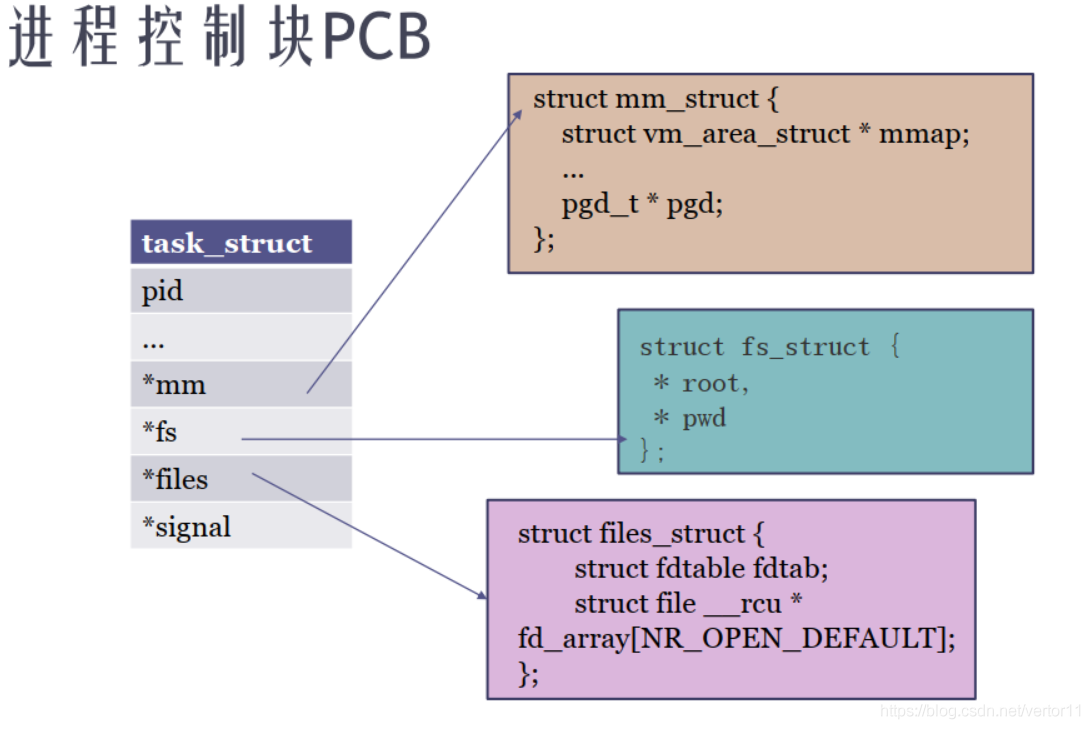
是资源的封装,是处于执行期的程序以及它所管理的资源(如 打开的文件,挂起的信号,进程状态,地址空间等)的总称。
用 PCB(Processing Control Block) 来描述,在linux中,用 struct task_struct 结构体来描述。
pid的数量是有限的,为 32768 (cat /proc/sys/kernel/pid_max)
1.2 线程
是调度单位。用struct thread_info(e.g. arm64)来描述 (线程描述符),该结构和进程的内核栈stack存放在同一个单独为进程分配的内存区域。(由于这个内存区域同时保存了thread_info和stack,所以,使用了union 来定义。)
为什么需要thread_info?
内核需要存储每个进程的PCB信息, linux内核是支持不同体系的的, 但是不同的体系结构可能进程需要存储的信息不尽相同, 这就需要我们实现一种通用的方式, 我们将体系结构相关的部分和无关的部门进行分离。
用一种通用的方式来描述进程, 这就是struct task_struct, 而thread_info就保存了特定体系结构的汇编代码段需要访问的那部分进程的数据。
进程最常用的是进程描述符结构task_struct,而不是thread_info结构的地址。为了获取当前CPU上运行进程的task_struct 结构,内核提供了current 宏。
union thread_union {//x86: CONFIG_ARCH_TASK_STRUCT_ON_STACK is not set.
#ifndef CONFIG_ARCH_TASK_STRUCT_ON_STACKstruct task_struct task;
#endif//x86,arm64: CONFIG_THREAD_INFO_IN_TASK=y
#ifndef CONFIG_THREAD_INFO_IN_TASKstruct thread_info thread_info;
#endif//x86: 8k, x86_64: 16k//arm: 8k, arm64: 16k//必须是8192的整数倍。unsigned long stack[THREAD_SIZE/sizeof(long)];
};1.3 进程内核栈
为什么需要内核栈?
因为进程在内核态运行时,需要保持自己的栈信息。该栈不同于用户态的进程所用的栈。
用户态进程所用的栈是在进程线性地址空间中。
进程内核栈除了需要保存内核空间过程调用外,还需要保存用户空间栈的数据和返回地址,以便 在返回用户空间继续执行。
进程通过syscall陷入内核时进行栈切换。
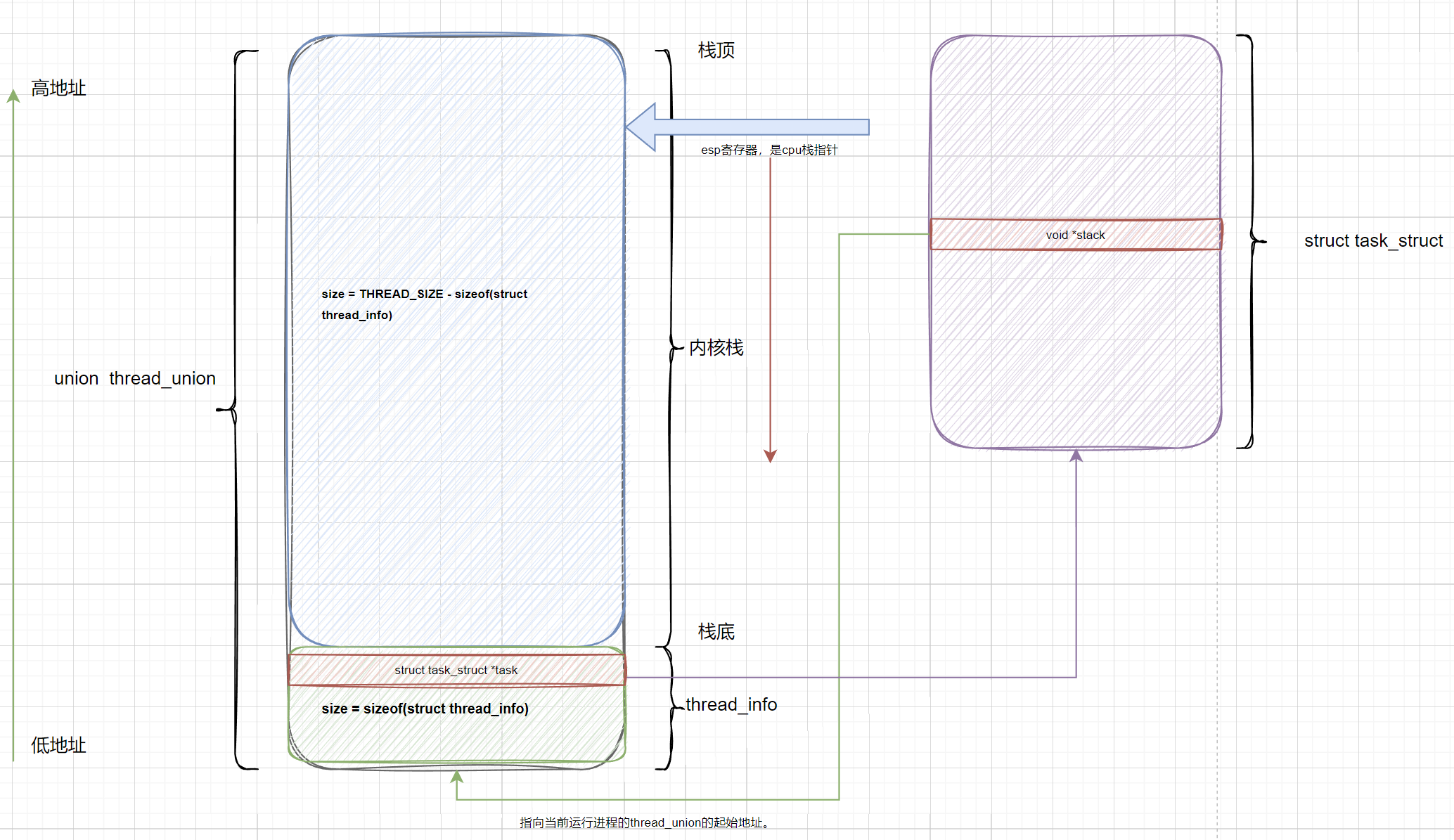
1.4 内核栈stack, struct thread_info, struct task_struct的关系:
经典关系 (CONFIG_THREAD_INFO_IN_TASK=n)
将thread_info存放在内核栈stack中。
在thread_info中保存task_struct指针。
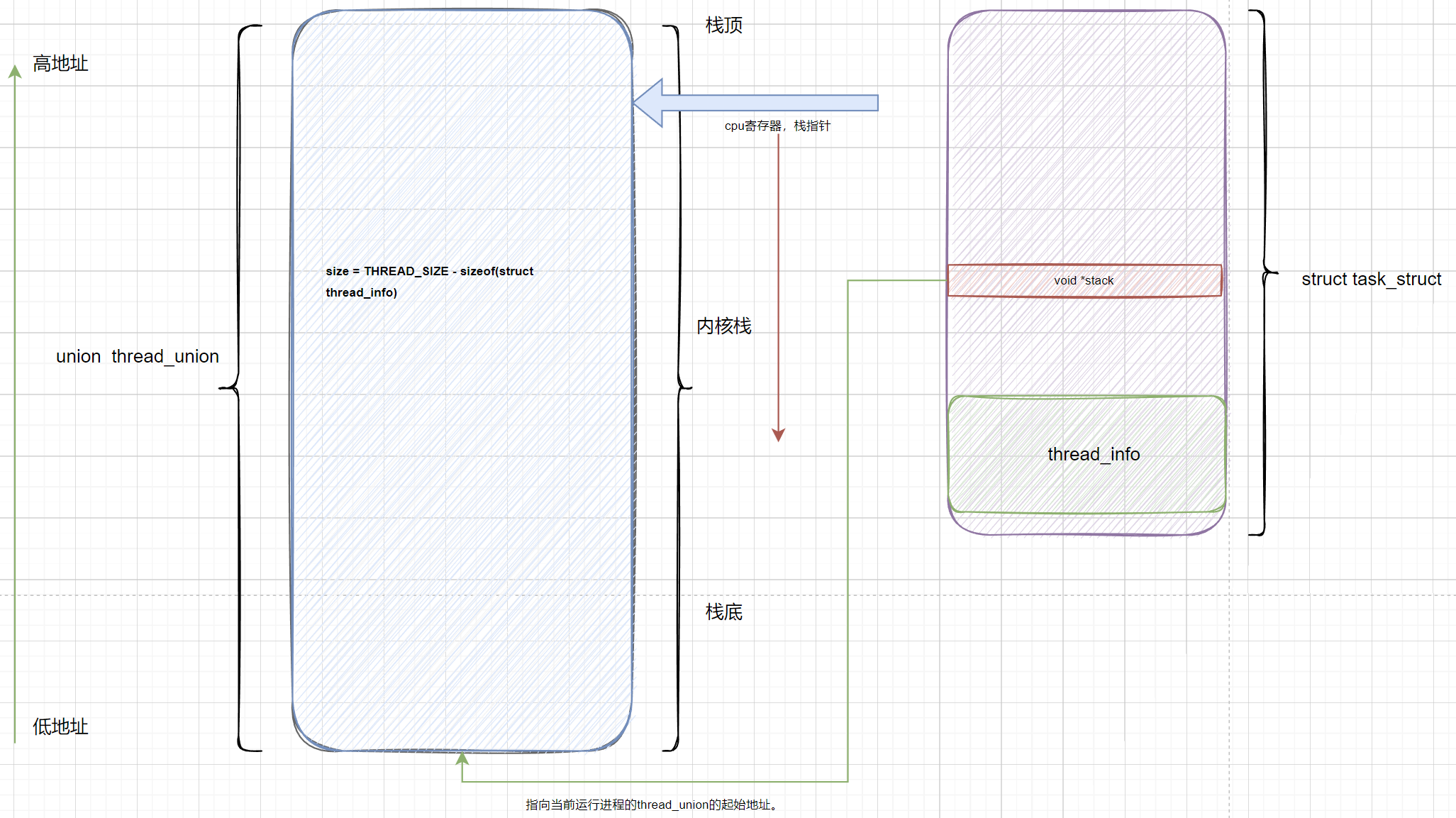
新版关系(CONFIG_THREAD_INFO_IN_TASK=y)
将thread_info放到task_struct中。
如何通过current宏找到当前的task_struct?
传统做法
通过寄存器(x86的esp寄存器, arm的sp栈栈顶寄存器)找到当前进程的内核栈顶,然后,找到thread_info,然后thread_info中保存了task_struct的指针,即就可以拿到当前进程的PCB了。
新做法(更高效)
x86
使用了current_task这个每CPU变量,来存储当前正在使用的cpu的进程描述符struct task_struct。x86上通用寄存器有限,无法像ARM中那样单独拿出寄存器来存储进程描述符task_sturct结构的地址。由于采用了每cpu变量current_task来保存当前运行进程的task_struct,所以在进程切换时,就需要更新该变量。在arch/x86/kernel/process_64.c文件中的__switch_to函数中有如下代码来更新此全局变量:
arm64:
会通过保存到寄存器(sp_el0)中,直接使用。
1.2 进程的各种状态和生命周期

上图中左侧为操作系统中通俗的进程三状态模型,右侧为Linux对应的进程状态切换。每一个标志描述了进程的当前状态,这些状态都是互斥的;
Linux中的 就绪态 和 运行态 对应的都是TASK_RUNNING 标志位,就绪态 表示进程正处在队列中,尚未被调度;运行态 则表示进程正在CPU上运行;
5个互斥状态 state域能够取5个互为排斥的值(通俗一点就是这五个值任意两个不能一起使用,只能单独使用)。系统中的每个进程都必然处于以上所列进程状态中的一种。 | |
状态 | 描述 |
TASK_RUNNING | 表示进程要么正在执行,要么正要准备执行(已经就绪),正在等待cpu时间片的调度 |
TASK_INTERRUPTIBLE | 进程因为等待一些条件而被挂起(阻塞)而所处的状态。这些条件主要包括:硬中断、资源、一些信号……,一旦等待的条件成立,进程就会从该状态(阻塞)迅速转化成为就绪状态TASK_RUNNING |
TASK_UNINTERRUPTIBLE | 意义与TASK_INTERRUPTIBLE类似,除了不能通过接受一个信号来唤醒以外,对于处于TASK_UNINTERRUPIBLE状态的进程,哪怕我们传递一个信号或者有一个外部中断都不能唤醒他们。只有它所等待的资源可用的时候,他才会被唤醒。这个标志很少用,但是并不代表没有任何用处,其实他的作用非常大,特别是对于驱动刺探相关的硬件过程很重要,这个刺探过程不能被一些其他的东西给中断,否则就会让进城进入不可预测的状态 |
TASK_STOPPED | 进程被停止执行,当进程接收到SIGSTOP、SIGTTIN、SIGTSTP或者SIGTTOU信号之后就会进入该状态 |
TASK_TRACED | 表示进程被debugger等进程监视,进程执行被调试程序所停止,当一个进程被另外的进程所监视,每一个信号都会让进城进入该状态 |
2个终止状态 两个附加的进程状态既可以被添加到state域中,又可以被添加到exit_state域中。只有当进程终止的时候,才会达到这两种状态. | |
状态 | 描述 |
EXIT_ZOMBIE | 进程的执行被终止,但是其父进程还没有使用wait()等系统调用来获知它的终止信息,此时进程成为僵尸进程 |
EXIT_DEAD | 进程的最终状态 |
TASK_KILLABLE Linux 中的新进程状态(TASK_UNINTERRUPTIBLE + TASK_WAKEKILL = TASK_KILLABLE) | |
状态 | 描述 |
TASK_KILLABLE | 当进程处于这种可以终止的新睡眠状态中,它的运行原理类似于 TASK_UNINTERRUPTIBLE,只不过可以响应致命信号 |
1.3 进程地址空间
可用pmap查看

1.4 内核线程
用ps查看线程时,名字为 [..] 这样的线程,都是内核线程。例如:中断线程化使用的irq内核线程;软中断使用的内核线程ksoftirqd;以及work使用的kworker内核线程。
内核线程没有地址空间,所以task_struct->mm指针为NULL。
内核线程没有用户上下文。
内核线程只工作在内核空间,不会切换至用户空间。但内核线程同样是可调度且可抢占的。普通线程即可工作在内核空间,也可工作在用户空间。
内核线程只能访问3GB以上内核地址空间,而普通线程可访问所有4GB地址空间。
常见内核线程 | prio | policy |
irq | 49 | SCHED_FIFO |
softirq | 120 | SCHED_NORMAL |
worker | 120 | SCHED_NORMAL |
init | 120 | SCHED_NORMAL |
kthreadd | 120 | SCHED_NORMAL |
cfinteractive | 0 | SCHED_FIFO |
中断内核线程优先级很高,为49,并且使用了实时调度策略。softirq和worker都是普通内核线程。
init_workqueues中创建了绑定CPU0的两个kworker_pool,分别是nice=0和nice=-20。apply_workqueue_attrs创建unbund worker_pool,即kworker/uX:0,也有两个attr,分别是nice=0和nice=-20
其它特殊内核线程init优先级为120,kthreadd优先级为120.
cfinteractive优先级最高,主要处理CPU Frequency负载更新。
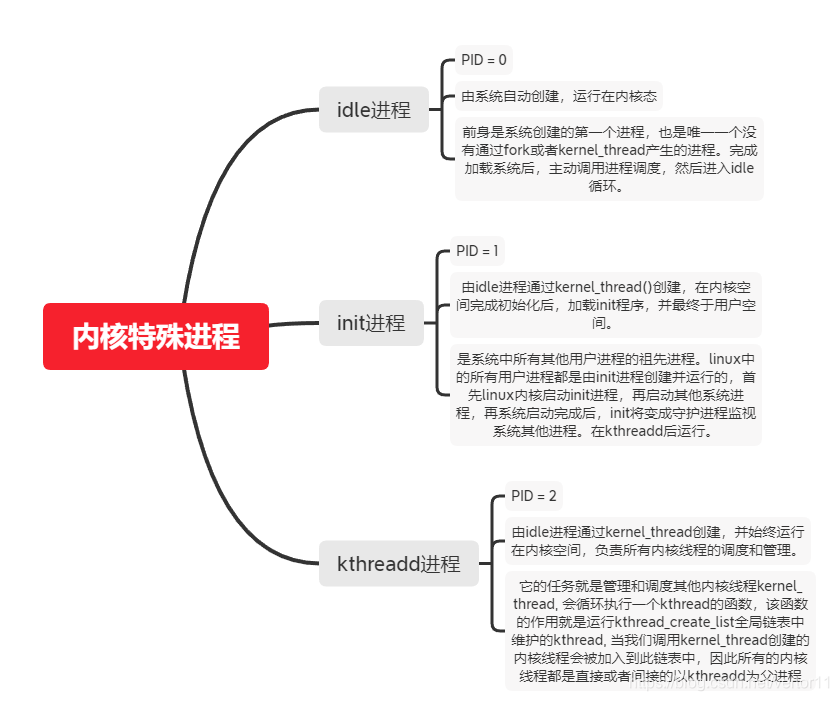
1.4.1几个特殊的内核进程
1.4.2内核线程相关API
kernel_thread()
kernel_thread接口,使用该接口创建的线程,必须在该线程中调用daemonize()函数,这是因为只有当线程的父进程指向”Kthreadd”时,该线程才算是内核线程,而恰好daemonize()函数主要工作便是将该线程的父进程改成“kthreadd”内核线程;默认情况下,调用deamonize()后,会阻塞所有信号,如果想操作某个信号可以调用allow_signal()函数。
kthread_create()
kthread_create接口,则是标准的内核线程创建接口,只须调用该接口便可创建内核线程;默认创建的线程是存于不可运行的状态,所以需要在父进程中通过调用wake_up_process()函数来启动该线程。
kthread_run()
创建并启动线程的函数; 线程一旦启动起来后,会一直运行,除非该线程主动调用do_exit函数,或者其他的进程调用kthread_stop函数,结束线程的运行。
kthread_should_stop(), kthread_stop()
停止线程
kthread_should_park(), kthread_parkme(), kthread_park(),kthread_unpark()
当在其他某个地方,调用 kthread_park(practice_task_p)后,线程将在kthread_parkme()处挂起睡眠,直到其他某个地方执行了kthread_unpark(practice_task_p)后,线程才被唤起,继续执行。
do_exit()
当线程执行到函数末尾时会自动调用内核中do_exit()函数来退出或其他线程调用kthread_stop()来指定线程退出。
1.6 抢占
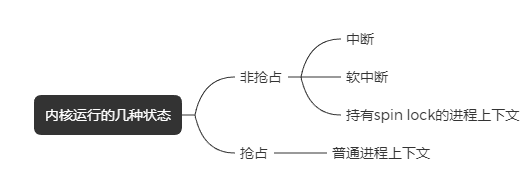
使用抢占式内核可以保证系统响应时间. 最高优先级的任务一旦就绪, 总能得到CPU的使用权。当一个运行着的任务使一个比它优先级高的任务进入了就绪态, 当前任务的CPU使用权就会被剥夺,或者说被挂起了,那个高优先级的任务立刻得到了CPU的控制权。如果是中断服务子程序使一个高优先级的任务进入就绪态,中断完成时,中断了的任务被挂起,优先级高的那个任务开始运行。
缺点
不能直接使用不可重入型函数。(即需要考虑高低优先级线程之间相关数据的竞态情况,需要加锁保护)
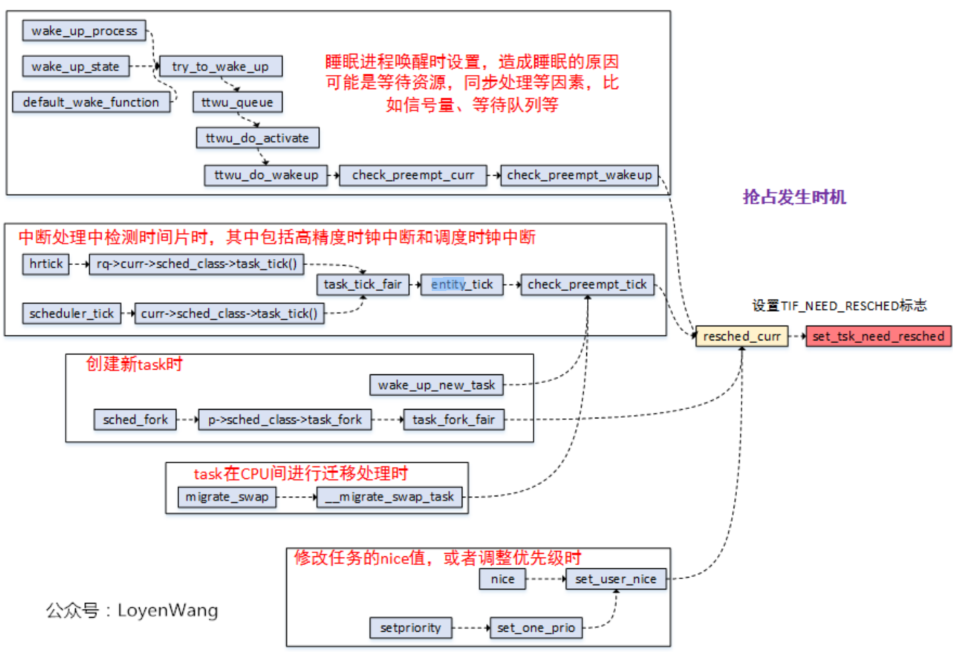
1.6.1 抢占触发点
不管是用户抢占还是内核抢占,抢占触发点是一样的。
内核提供了set_tsk_need_resched() 函数来将 thread_info中flag字段设置成TIF_NEED_RESCHED;
设置了TIF_NEED_RESCHED 标志,表明需要发生抢占调度;
1 | 信号量、等到队列、completion等机制唤醒时都是基于waitqueue的,而waitqueue的唤醒函数为default_wake_function(),其调用try_to_wake_up() 将被唤醒的任务更改为就绪状态并设置 need_resched 标志。 |
2 | 时钟中断处理例程检查当前任务的时间片,当任务的时间片消耗完时,scheduler_tick() 函数就会设置 need_resched 标志; |
3 | 新建一个任务时,可能会使高优先级的任务进入就绪状态; |
4 | 对CPU(SMP)进行负载均衡时,当前任务可能需要放到另外一个CPU上运行 |
5 | 设置用户进程的nice值时,可能会使高优先级的任务进入就绪状态; |
6 | 改变任务的优先级时,可能会使高优先级的任务进入就绪状态; |
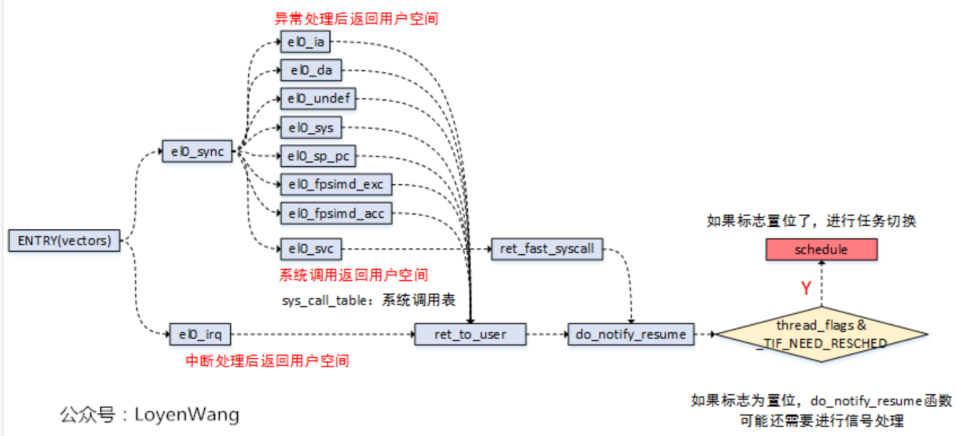
1.6.2 抢占执行点
用户抢占
抢占执行发生在进程处于用户态。抢占的执行,最明显的标志就是调用了schedule() 函数,来完成任务的切换。具体来说,在用户态执行抢占在以下几种情况:
异常处理后返回到用户态;
中断处理后返回到用户态;
系统调用后返回到用户态;
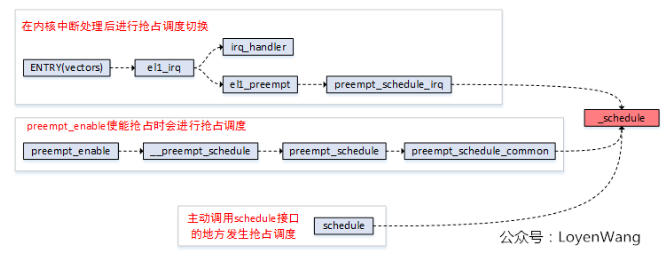
内核抢占
抢占执行发生在进程处于内核态。
Linux内核有三种内核抢占模型:
CONFIG_PREEMPT_NONE
不支持内核抢占,中断退出后,需要等到低优先级任务主动让出CPU才发生抢占切换;
一般服务器选择这种策略;
CONFIG_PREEMPT_VOLUNTARY
支持内核自愿抢占,即在一些耗时的routine中增加抢占点(提高实时性),在中断退出后遇到抢占点时进行抢占切换;
一般桌面系统选择这种策略;
CONFIG_PREEMPT
支持内核抢占,当中断退出后,如果遇到了更高优先级的任务,立即进行任务抢占;
有实时响应的内核选择这种策略;

抢占执行点
中断执行完毕后进行抢占调度;
主动调用preemp_enable() 或schedule() 等接口的地方进行抢占调度;
二. 进程调度
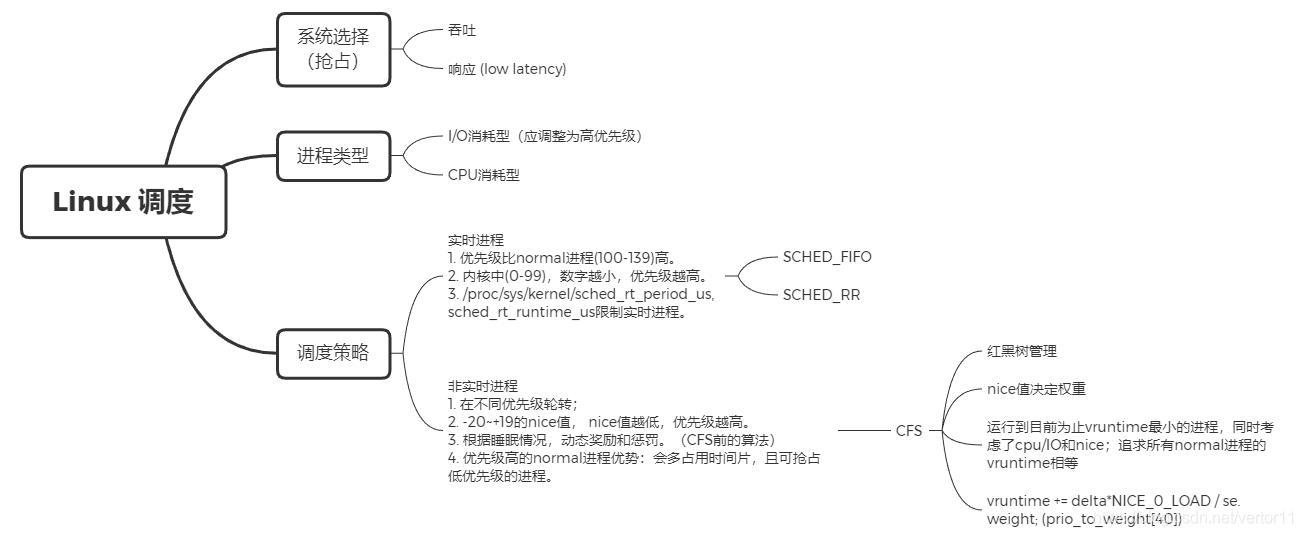
2.1吞吐 vs 响应:吞吐和响应之间的矛盾
响应:最小化某个任务的响应时间,哪怕牺牲其他任务为代价。
吞吐:全局视野,整个系统的workload被最大化处理。
2.2 I/O 消耗型 vs CPU消耗型
IO bound: CPU利用率低,进程的运行效率主要受限于I/O速度。
CPU bound:多数时间花在CPU上面(做运算)
2.3 优先级
linux系统中有多种优先级,下面是其关系:
优先级 | |
字段 | 描述 |
static_prio | 用于保存静态优先级,可以通过nice系统调用来进行修改;(100 ~ 139) |
rt_priority | 用于保存实时优先级;0 - MAX_RT_PRIO-1 (0 - 99) |
normal_prio | 值取决于静态优先级和调度策略; |
prio | 用于保存动态优先级,调度器最终使用的。0 ~ 139(包括 0 和 139) |
2.3.1 prio动态优先级
prio 的值是调度器最终使用的优先级数值,即调度器选择一个进程时实际选择的值。
prio 值越小,表明进程的优先级越高。prio 值的取值范围是 0 ~ MAX_PRIO,即 0 ~ 139(包括 0 和 139),根据调度策略的不同,又可以分为两个区间,其中区间 0 ~ 99 的属于实时进程,区间 100 ~139 的为非实时进程。
当进程为实时进程时, prio 的值由实时优先级值(rt_priority)计算得来;
prio = MAX_RT_PRIO - 1 - rt_priority // 进程为实时进程
当进程为非实时进程时,prio 的值由静态优先级值(static_prio)得来。
prio = static_prio // 进程为非实时进程
2.3.2 static_prio 静态优先级
静态优先级不会随时间改变,内核不会主动修改它,只能通过系统调用 nice 去修改 static_prio。
通过调用 NICE_TO_PRIO(nice) 来修改 static_prio 的值, static_prio 值的计算方法如下:
static_prio = MAX_RT_PRIO + nice +20
MAX_RT_PRIO 的值为100,nice 的范围是 -20 ~ +19,故 static_prio 值的范围是 100 ~ 139。 static_prio 的值越小,表明进程的静态优先级越高。
2.3.3 normal_prio归一化优先级
normal_prio 的值取决于静态优先级和调度策略,可以通过 _setscheduler() 函数来设置 normal_prio 的值 。
对于非实时进程,normal_prio = static_prio
对于实时进程,normal_prio = MAX_RT_PRIO-1 - p->rt_priority。
2.3.4 rt_priority实时优先级
rt_priority 值的范围是 0 ~ 99,只对实时进程有效。
prio = MAX_RT_PRIO-1 - p->rt_priority
即rt_priority 值越大,则 prio 值越小,故 实时优先级(rt_priority)的值越大,意味着进程优先级越高。
rt_priority 的值也是取决于调度策略的,可以在 _setscheduler 函数中对 rt_priority 值进行设置。
2.4 调度器类SCHED_CLASS和调度策略 policy
所谓调度,就是按照某种调度的算法,从进程的就绪队列中选取进程分配CPU,主要是协调对CPU等的资源使用。进程调度的目标是最大限度利用CPU时间。
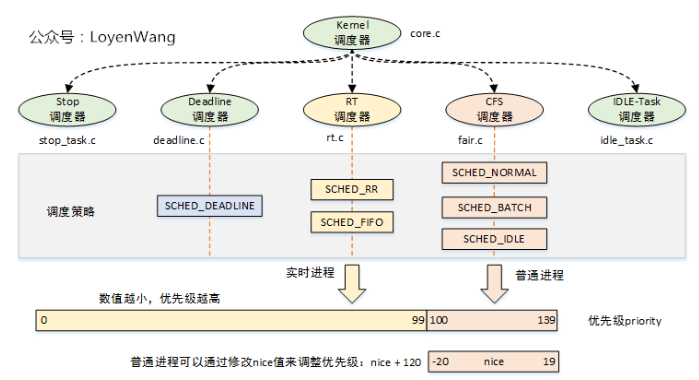
2.4.1调度器类
内核默认提供了5个调度器,Linux内核使用struct sched_class来对调度器进行抽象。
目前系統中,Scheduling Class的优先级顺序为stop_sched_class > dl_sched_class > rt_sched_class > cfs_sched_class > idle_sched_class
调度器类 SCHED_CLASS | 描述 | |
Stop调度器 stop_sched_class | 优先级最高的调度类,可以抢占其他所有进程,不能被其他进程抢占; 作用: 1.发生在cpu_stop_cpu_callback 进行cpu之间任务migration; 2.HOTPLUG_CPU的情况下关闭任务。 | |
Deadline调度器 dl_sched_class | 使用红黑树,把进程按照绝对截止期限进行排序,选择最小进程进行调度运行; | |
RT调度器 rt_sched_class | 实时调度器,为每个优先级维护一个队列; | |
CFS调度器 cfs_sched_class | 完全公平调度器,采用完全公平调度算法,引入虚拟运行时间概念; | |
IDLE-Task调度器 idle_sched_class | 空闲调度器,每个CPU都会有一个idle线程,当没有其他进程可以调度时,调度运行idle线程; |
2.4.2 调度策略
Linux内核提供了一些调度策略供用户程序来选择调度器,其中Stop调度器和IDLE-Task调度器,仅由内核使用,用户无法进行选择。
字段 POLICY | 描述 | 所在调度器类 |
SCHED_DEADLINE | 限期进程调度策略,使task选择Deadline调度器来调度运行; | Deadline |
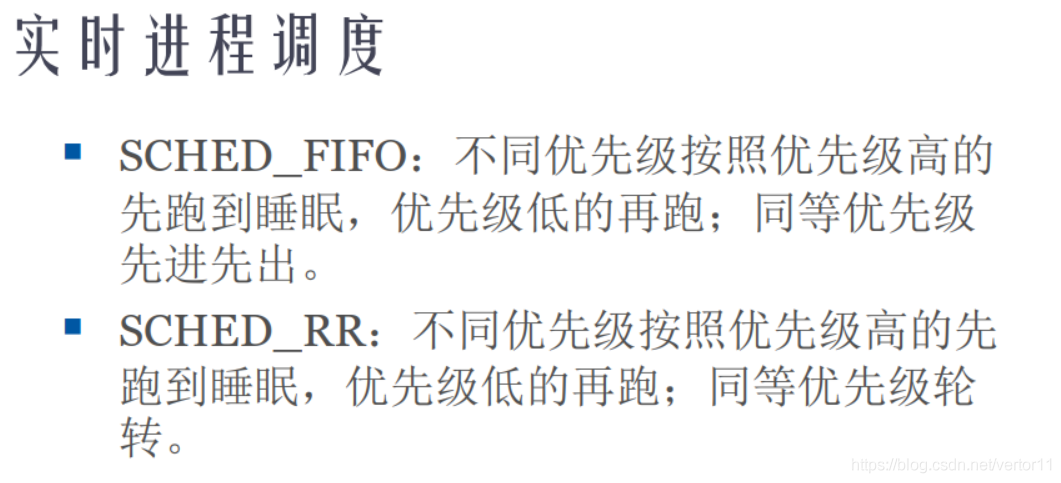
SCHED_RR | 实时进程调度策略,时间片轮转,进程用完时间片后加入优先级对应运行队列的尾部,把CPU让给同优先级的其他进程; | RT |
SCHED_FIFO | 实时进程调度策略,先进先出调度没有时间片,没有更高优先级的情况下,只能等待主动让出CPU; | RT |
SCHEE_NORMAL | 普通进程调度策略,使task选择CFS调度器来调度运行; | CFS |
SCHED_BATCH | 普通进程调度策略,批量处理,使task选择CFS调度器来调度运行; | CFS |
SCHED_IDLE | 普通进程调度策略,使task以最低优先级选择CFS调度器来调度运行; | CFS |
2.5 RT调度策略和普通进程在调度算法上的差异
Linux的RT调度策略和普通进程在调度算法上面有差异,RT的SCHED_FIFO和SCHED_RR采用的是一个bitmap:
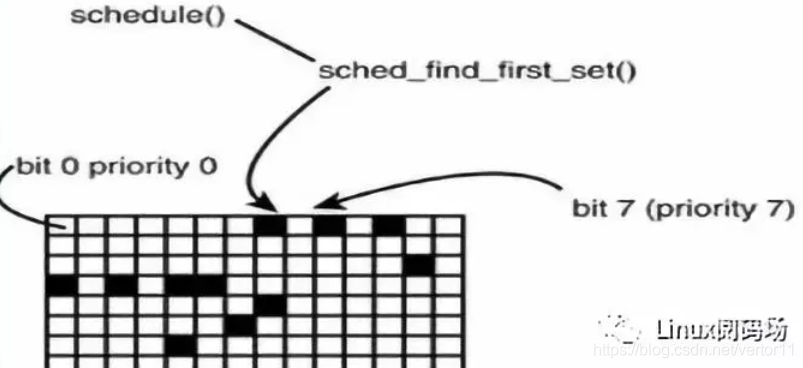
每次从第0bit开始往后面搜索第一个有进程ready的bit,然后调度这个优先级上面的进程执行,所以,在内核里面,prio数值越小,优先级越高。但是,从用户态的API里面,则是数值越大,优先级越高。
下面的代码,一个线程通过调用API把自己设置为SCHED_FIFO,优先级50。
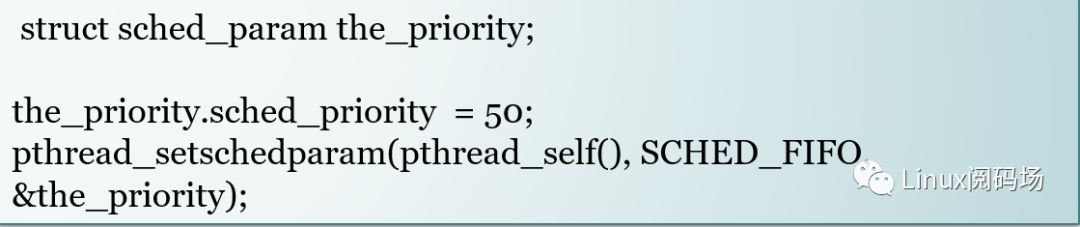
这个上面的50,对应内核的49 (从内核的视角上面来看,又会用99减去用户在chrt里面设置的优先级)。
如果我们把优先级设置为51:
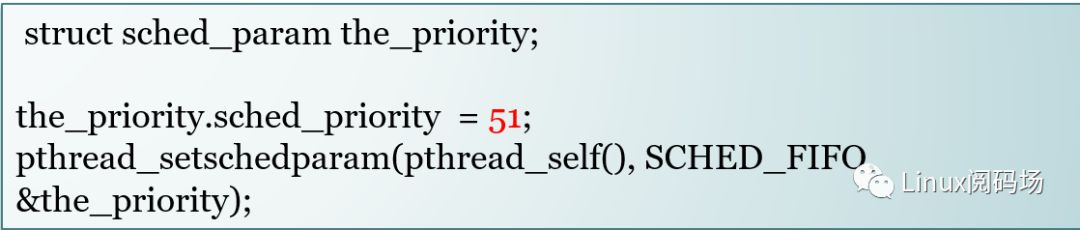
这个51,对应内核bitmap上面的48。
所以,你会发现,从用户的视角来看,数值变大,优先级变高。
对于RT的进程而言,TOP的视角里面的 PR= -1 -用户视角。

注:只有最高优先级的RT进程,才在top里面显示为rt。(用户视角的99---内核bitmap视角的0)
2.6 普通进程的优先级 nice
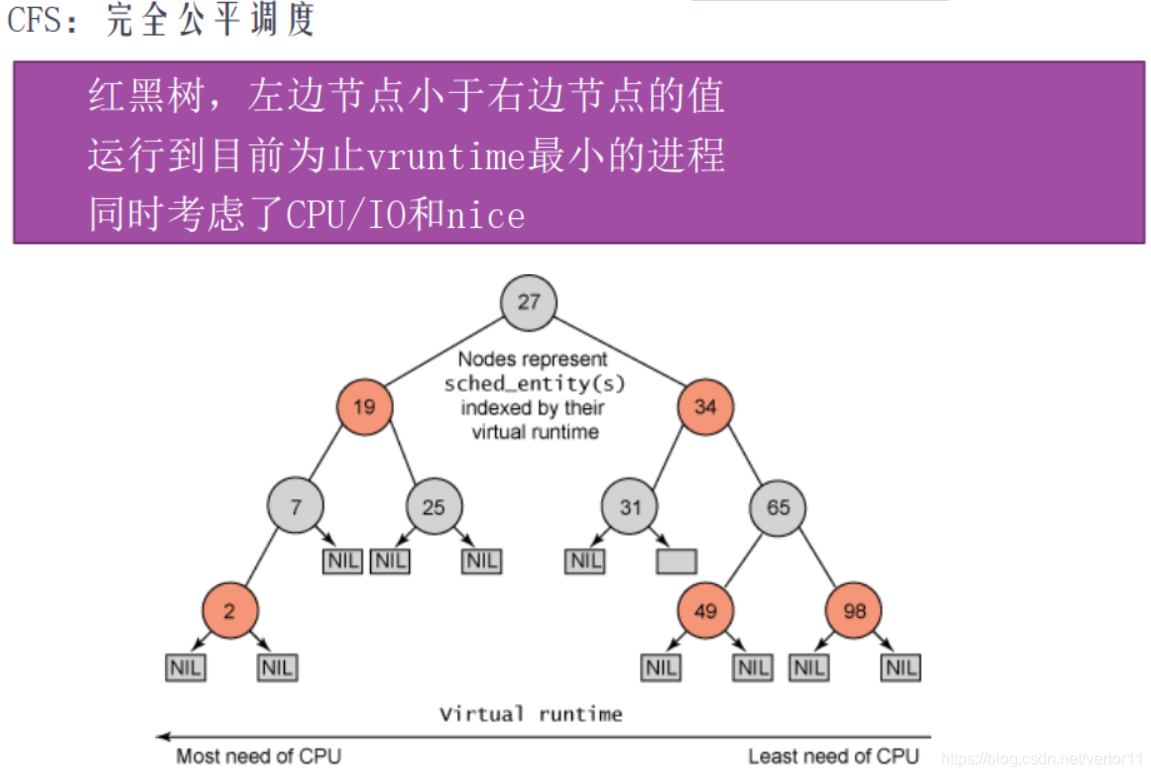
普通的讲nice的人相对来说比较简单,我们更关注它的nice值,-20~19之间,nice越低,优先级越高,权重越大,在CFS的红黑树左边的机会大。
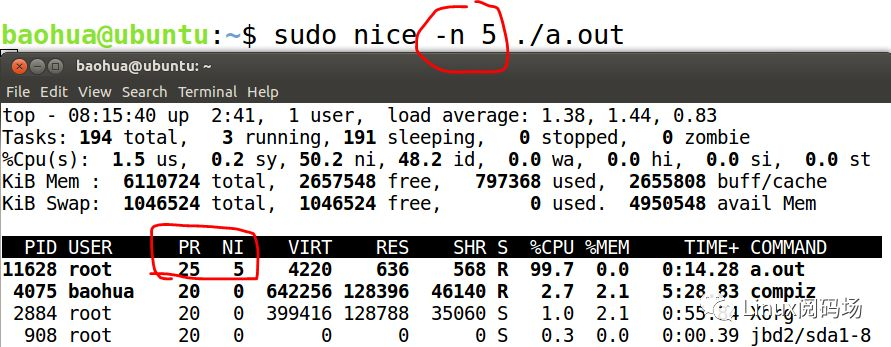
你发现.nice为5的进程,在top命令显示PR是25。
下面我们看nice是-5的:
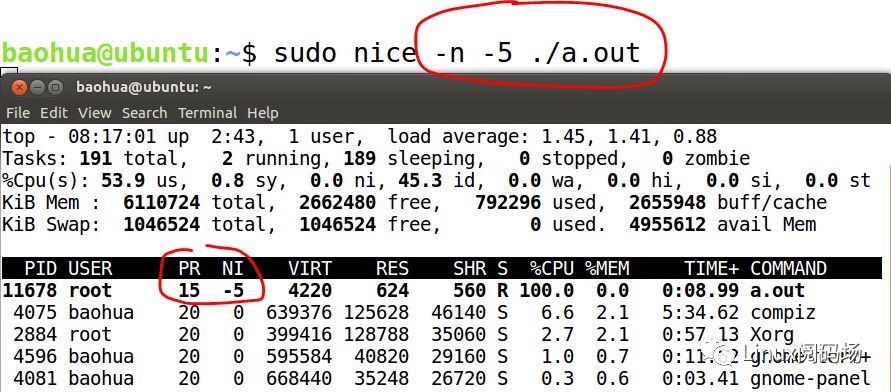

它显示的是PR=15。
由此大家可以发现规律,对于普通的采用CFS策略的NORMAL进程,top里面的 PR=20+NICE
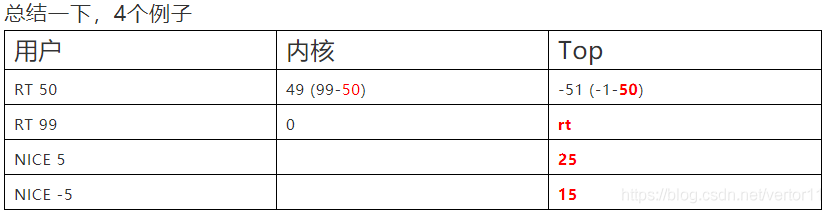
由此发现,在top里面,RT策略的PR都显示为负数;最高优先级的RT,显示为rt。top命令里面也是,数字越小,优先级越高。
2.7 ps 中的RTPRIO, PRI,NI
一个是PRI,一个是NI,这到底是什么东西?相对而言,PRI也还是比较好理解的,即进程的优先级,或者通俗点说就是程序被CPU执行的先后顺序,此值越小进程的优先级别越高。那NI呢?就是我们所要说的nice值了,其表示进程可被执行的优先级的修正数值。如前面所说,PRI值越小越快被执行,那么加入nice值后,将会使得PRI变为:PRI(new)=PRI(old)+nice。这样,当nice值为负值的时候,那么该程序将会优先级值将变小,即其优先级会变高,则其越快被执行。
到目前为止,更需要强调一点的是,进程的nice值不是进程的优先级,他们不是一个概念,但是进程nice值会影响到进程的优先级变化。
注:这里的PRI = 139 - 内核中prio。即该值越大,优先级越高。
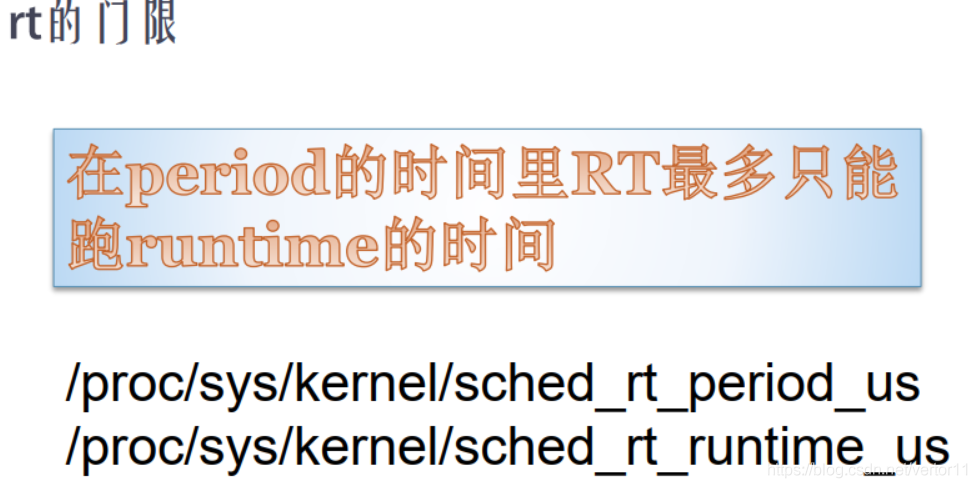
2.8 rt的门限
2.9 CFS调度


2.10 怎样修改进程优先级?

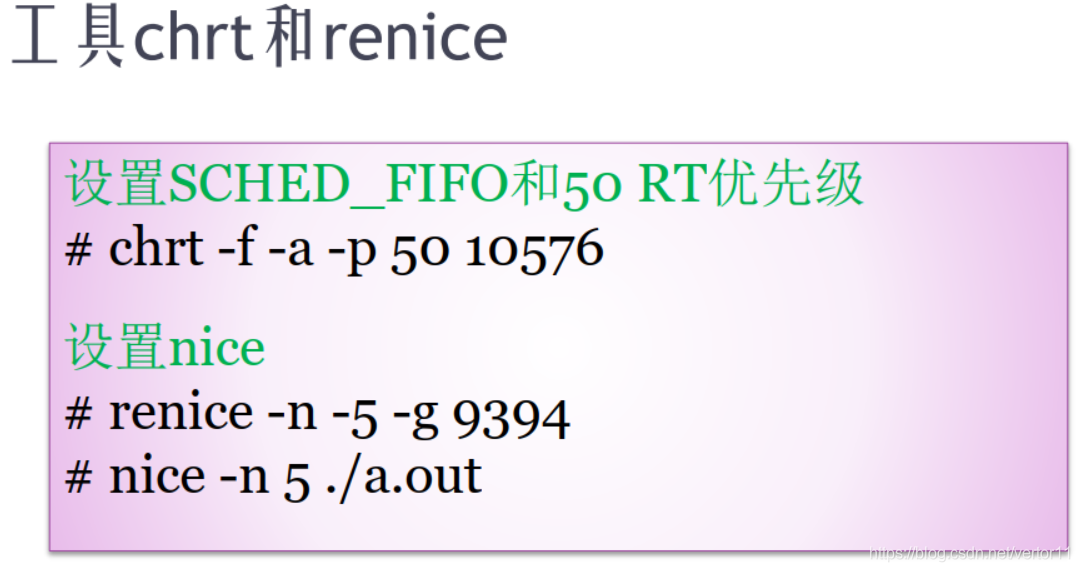
2.10.1 实时进程调度
2.10.2 非实时进程的调度和动态优先级

2.11 怎样查看linux系统中的实时进程和普通进程?
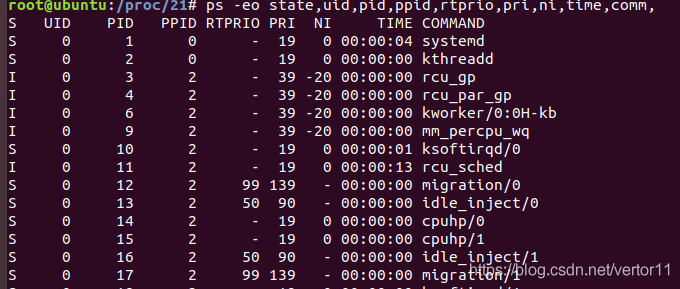
ps -eo state,uid,pid,ppid,rtprio,time,comm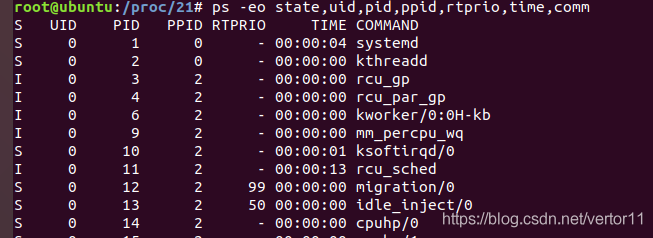
RTPRIO
"-": 表示普通进程
"数字": 表示优先级为xx的实时进程
相关文章:
linux 进程及调度基础知识
引用Linux进程管理专题Linux进程管理与调度-之-目录导航Linux下0号进程的前世(init_task进程)今生(idle进程)----Linux进程的管理与调度(五)蜗窝科技-进程管理郭健: Linux进程调度技术的前世今生之“前世”郭健: Linux进程调度技术…...
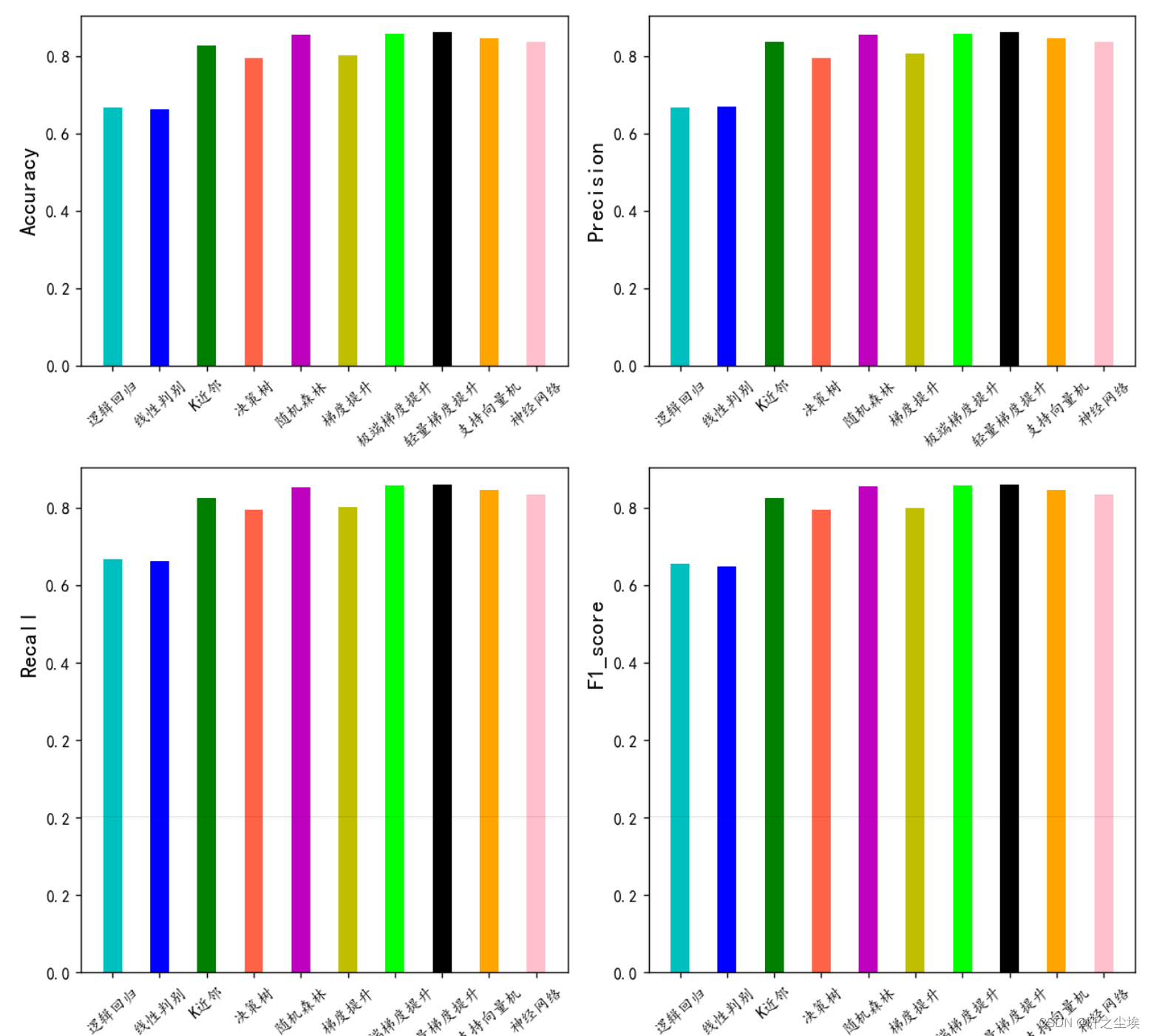
Python计算分类问题的评价指标(准确率、精确度、召回率和F1值,Kappa指标)
机器学习的分类问题常用评论指标有:准确率、精确度、召回率和F1值,还有kappa指标 。 每次调包去找他们的计算代码很麻烦,所以这里一次性定义一个函数,直接计算所有的评价指标。 每次输入预测值和真实值就可以得到上面的指标值&a…...

51单片机LCD1602的使用
文章目录前言一、LCD1602简单介绍二、LCD1602中各个引脚的作用四、LCD1602命令解析1.写命令2.写数据3.清屏指令4.光标归位指令5.进入模式设置指令6.显示开关控制指令7.设定显示屏或光标移动方向指令三、LCD1602代码编写四、代码测试总结前言 本篇文章将为大家讲解LCD1602的使用…...

[深入理解SSD系列综述 1.5] SSD固态硬盘参数图文解析_选购固态硬盘就像买衣服?
版权声明:付费作品,未经许可,不可转载前言SSD (Solid State Drive),即固态硬盘,通常是一种以半导体闪存(NAND Flash)作为介质的存储设备。SSD 以半导体作为介质存储数据&…...

zio1升级到zio2踩坑和总结
并不全,记录了一些流程和注意点。新项目建议直接用zio2! 首先,从1.0迁移到2.0,可以使用官方的scalefix规则完成一部分方法自动替换(迁移主要解决方法重命名,去掉Has)。 然后,添加依…...

【算法题】1834. 单线程 CPU
插: 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 坚持不懈,越努力越幸运,大家一起学习鸭~~~ 题目: 给你一个二维数组 tasks ÿ…...
Vue学习[2023]
笔记 一、Vue基础: 1.模板语法有2大类: 插值语法: 功能:用于解析标签体内容。 写法:{{xxx}},xxx是js表达式,且可以直接读取到data中的所有属性。 指令语法: 功能:用于…...
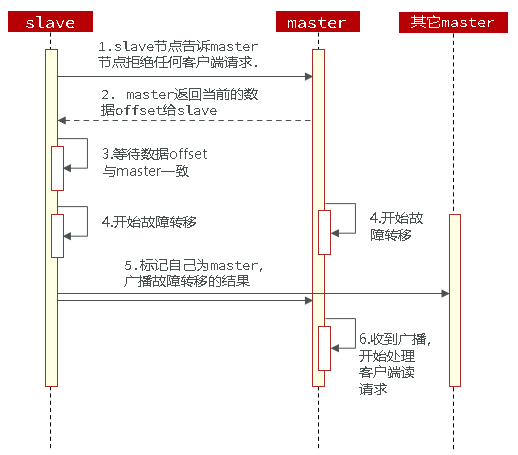
【Redis】Redis分片集群
【Redis】Redis分片集群 文章目录【Redis】Redis分片集群1. 搭建分片集群1.1 分片集群结构1.2 搭建分片集群1.2.1 集群结构1.2.2 准备实例和配置1.2.3 启动1.2.4 创建集群1.2.5 测试2. 散列插槽2.1 总结3. 集群伸缩4. 故障转移4.1 数据迁移5. RedisTemplate访问分片集群1. 搭建…...

【Android笔记81】Android之RxJava的介绍及其使用
这篇文章,主要介绍Android之RxJava及其使用。 目录 一、RxJava响应式编程 1.1、RxJava介绍 1.2、RxJava常用方法 (1)引入RxJava依赖...

Pr 定格拍照动画
哈喽,各位小伙伴!今天我们来学习一下如何制作定格拍照动画? 新建序列 新建一个1920*1080的序列,将视频拖入序列中 选择定格画面右键—插入帧定格分段中间部分就会变成一张图片(图片时长可伸缩) 复制素…...

放弃node-sass,启用sass
在下载一个新项目时运行:npm run install 发现报错 npm uninstall 异常 Error: Could not find any Visual Studio installation to use 或是 ------------------------- You need to install the latest version of Visual Studio npm ERR! gyp ERR! find VS incl…...
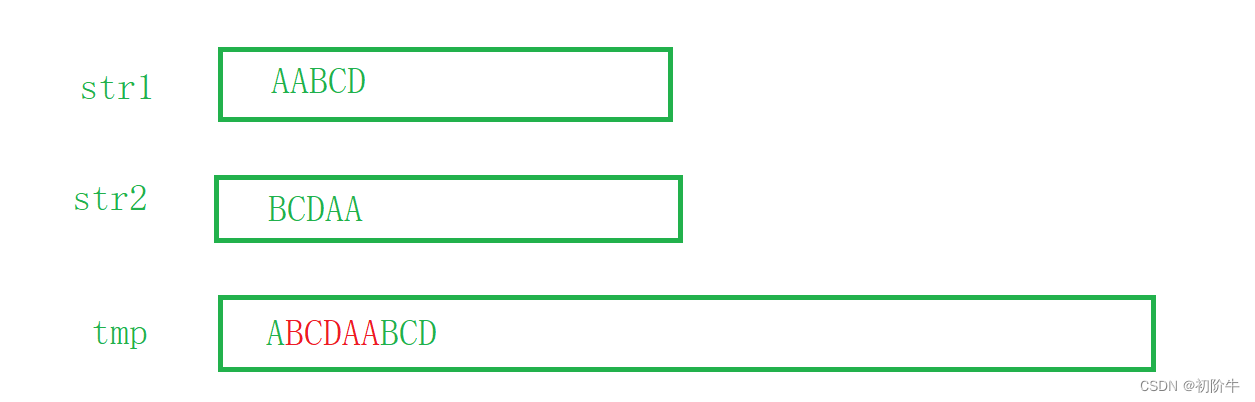
力扣旋转字符串
🎈个人主页:🎈 :✨✨✨初阶牛✨✨✨ 🐻推荐专栏: 🍔🍟🌯 c语言初阶 🔑个人信条: 🌵知行合一 🍉本篇简介:>:介绍字符串旋转,左旋,右旋即旋转结果. 金句分享: ✨好好干&…...

Java 代码组织机制
包 使用任何语言进行编程都有一个相同的问题,就是命名冲突。 包类似于计算机中的文件夹,正如文件放在文件夹中,类和接口放在包中,为便于组织,文件夹一般是一个层次结构,包也类似。 包有包名,…...
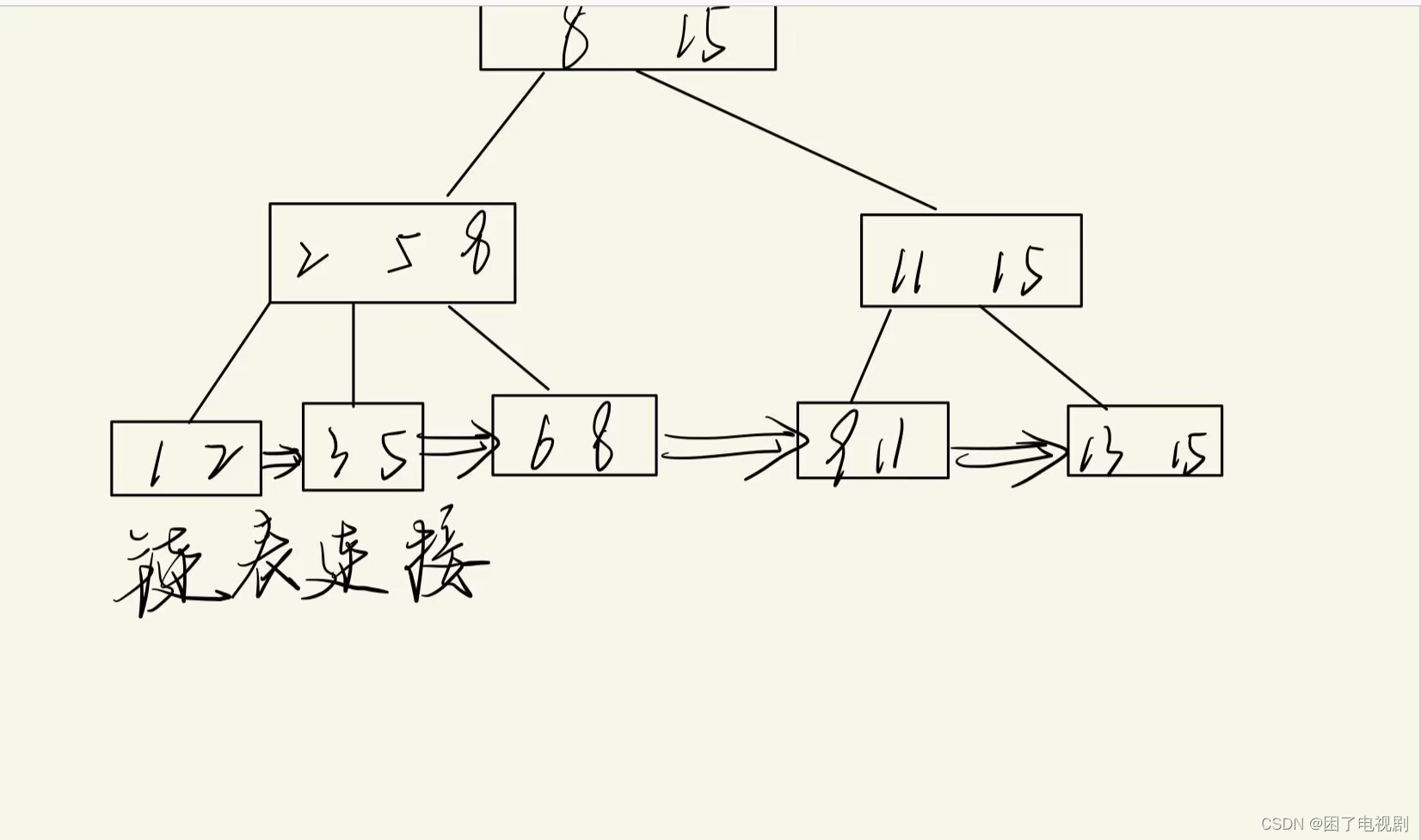
【剧前爆米花--爪哇岛寻宝】MySQL中索引和事务
作者:困了电视剧 专栏:《MySQL数据库》 文章分布:这是一篇关于Java中异常类的文章,在本篇文章中详细讲解了异常的使用逻辑和底层的执行过程,如有疏漏,欢迎大佬指正! 目录 索引 用法 底层逻辑…...
C++ 线程库
文章目录thread 创建mutexmutexrecursive_mutextimed_mutexlock_guard原子操作atomic条件变量condition_variable其他线程安全问题shared_ptr单例模式C 线程库是 C11 标准中引入的一个特性,它使得 C 在语言级别上支持多线程编程,不需要依赖第三方库或操作…...

python字典和集合——笔记
一、介绍 1、泛映射类型 collections.abc模块中有Mapping和MutableMapping这两个抽象基类,它们的作用是为dict和其他类似的类型定义形式接口(在Python 2.6到Python 3.2的版本中,这些类还不属于collections.abc模块,而是隶属于coll…...

TEX:显示文本
文章目录字体选择字体fontspec宏包根据字体形状控制字体为不同的字体形状选择不同的特征为不同的字体大小状选择不同的特征中文字体选择xeCJK宏包字体选择与设置XELATEX字体名查找字体集与符号居中与缩进居中单边调整两边缩进诗歌缩进列表itemize样例enumerate样例description样…...

SS-ELM-AE与S2-BLS相关论文阅读记录
Broad learning system for semi-supervised learning 摘要:本文认为,原始BLS采用的稀疏自编码器来生成特征节点是一种无监督学习方法,这意味着忽略了标注数据的一些信息,并且难以保证同类样本之间的相似性和相邻性,同…...

ESP32设备驱动-MAX6675冷端补偿K热电偶数字转换器
MAX6675冷端补偿K热电偶数字转换器 1、MAX6675介绍 MAX6675执行冷端补偿并将来自K型热电偶的信号数字化。 数据以 12 位分辨率、SPI™ 兼容的只读格式输出。 该转换器可将温度解析为 0.25C,读数高达 +1024C,并且在 0C 至 +700C 的温度范围内具有 8 LSB 的热电偶精度。 MAX…...
)
Python基础知识汇总(字符串四)
目录 字母的大小写转换 lower()方法 upper()方法 删除字符串中的空格和特殊字符 strip()方法...

OpenClaw压力测试:Phi-3-mini-128k-instruct持续运行24小时稳定性报告
OpenClaw压力测试:Phi-3-mini-128k-instruct持续运行24小时稳定性报告 1. 测试背景与目标 上周在本地部署了OpenClawPhi-3-mini组合后,我一直在思考这套方案的稳定性边界。作为个人自动化助手,它能否胜任724小时不间断工作?当我…...

PWM技术原理与工程实践全解析
1. PWM技术基础解析脉冲宽度调制(PWM)作为现代电子电力控制的核心技术,其本质是通过调节脉冲信号的导通时间比例来实现对功率的有效控制。我第一次接触这个概念是在调试直流电机调速项目时,当时被其精妙的设计思想所震撼。1.1 关键…...

马年市场快报分析:欧美组合式一氧化碳及可燃气体报警器指南
马年市场快报分析:欧美组合式一氧化碳及可燃气体报警器指南根据您提供的快报内容,我将从专业角度逐步分析欧美组合式一氧化碳(CO)及可燃气体报警器的关键信息,包括安全标准、风险因素、探测器区别、安装建议以及相关产…...

电子测试岗面试翻车实录:我的硬件知识与英语短板,以及如何逆袭”
一:首先进行英文的自我介绍Hello, my name isxxx .你好,我叫xxx。I’m 20 years old, and I’m currently a third-year student majoring inElectronic Information Engineering at xxxx我今年20岁,目前是xxx电子信息工程专业的大三学生。My…...

【手把手教学】使用stitch 生成ui图,导入figma,再用codebuddy生成工程代码
目录 一.stich使用 1.1 关键词生成 1.2 生成ui图 1.3 导出figma编辑 二. codebuddy使用 编辑2.1打开figma 编辑 2.2 复制ui到设计面板 2.3生成工程代码 三. 结语 一.stich使用 stich官网地址 Google Stitch 是 Google Labs 推出的、基于 Gemini 大模型驱动的A…...

微型LORA数传模块:科技赋能,传统楼宇智能蜕变
微型LoRa数传模块凭借小体积、低功耗、远距离、强穿透、易部署的核心优势,是智慧楼宇实现无线化、低成本、广覆盖物联网感知与控制的理想选择,尤其适合老旧楼宇改造与新建楼宇的轻量化智能化升级。一、核心优势(适配智慧楼宇场景)小体积易安装࿱…...

开源!手搓ESP-VoCat 喵伴桌面AI助手,帮你养萌宠 OpenClaw龙虾,内置豆包,会听、会动、会陪伴
模组选型:ttps://item.taobao.com/item.htm?ftt&id1033585120956&spma21dvs.23580594.0.0.4fee2c1bAqCiqc&skuId6211360130611 ESP-VoCat 喵伴是乐鑫携手火山引擎扣子大模型团队打造的智能 AI 开发套件,适用于玩具、智能音箱、智…...

坚定信心,顺势而为 ——中国企业出海与人工智能时代语言服务行业的新机遇
坚定信心,顺势而为——中国企业出海与人工智能时代语言服务行业的新机遇前言人工智能技术的逐步成熟以及智能体的普遍应用是最近两三年的热点和趋势,很多人说,2026年是智能体爆发的元年。春节期间,豆包、千问、元宝等50亿元的红包…...
)
别再只会用Arduino了!用ESP8266+MicroPython快速搭建你的第一个物联网小项目(附完整代码)
用MicroPython解锁ESP8266的物联网潜能:10分钟搭建温湿度监测系统 当提到物联网开发时,大多数人的第一反应可能是Arduino和C。但今天,我要带你体验一种更高效、更友好的方式——MicroPython。这种基于Python的嵌入式编程语言,让物…...

新手入门服务器:用快马生成你的第一个xshell等效连接程序
作为一个刚接触服务器运维的新手,第一次使用xshell这类工具时,面对各种专业术语和复杂操作确实容易一头雾水。最近我发现用InsCode(快马)平台生成学习项目特别适合入门,今天就分享一下如何通过可运行的代码实例来理解SSH连接的核心概念。 理解…...