C++ pair+map+set+multimap+multiset+AVL树+红黑树(深度剖析)
文章目录
- 1. 前言
- 2. 关联式容器
- 3. pair——键值对
- 4. 树形结构的关联式容器
- 4.1 set
- 4.1.1 set 的介绍
- 4.1.2 set 的使用
- 4.2 map
- 4.2.1 map 的介绍
- 4.2.2 map 的使用
- 4.3 multiset
- 4.3.1 multiset 的介绍
- 4.3.2 multiset 的使用
- 4.4 multimap
- 4.4.1 multimap 的介绍
- 4.4.2 multimap 的使用
- 5. 底层结构
- 5.1 AVL 树
- 5.1.1 AVL 树的概念
- 5.1.2 AVL 树节点的定义
- 5.1.3 AVL 树的插入
- 5.1.4 AVL 树的旋转
- 5.1.5 AVL 树的验证
- 5.1.6 AVL 树的删除(了解)
- 5.1.7 AVL 树全部代码
- 5.1.8 AVL 树的性能
- 5.2 红黑树
- 5.2.1 红黑树的概念
- 5.2.2 红黑树的性质
- 5.2.3 红黑树节点的定义
- 5.2.4 红黑树的插入
- 5.2.5 红黑树的验证
- 5.2.6 红黑树的删除(了解)
- 5.2.7 红黑树全部代码
- 5.2.8 红黑树与 AVL 树的比较
- 5.3 红黑树模拟实现 STL 中的 map 与 set
- 5.3.1 迭代器实现
- 5.3.2 改造红黑树
- 5.3.3 map 的模拟实现
- 5.3.4 set 的模拟实现
1. 前言
在学习二叉搜索树的过程中,我们发现当二叉搜索树为单支树时,其搜索的效率是很低的。为了能让二叉搜索树的搜索效率稳定在 l o g 2 N log_2 N log2N,我们引入两种新的二叉搜索树—— AVL 树和红黑树。而 STL 库中的 map 和 set 在底层中用到的数据结构就是红黑树。
本篇文章将着重讲解关联式容器、键值对、树形结构的关联式容器(set、map、multiset 和 multimap)、AVL 树的模拟实现、红黑树的模拟实现以及 map 和 set 的模拟实现。
2. 关联式容器
在此之前,我们已经接触过 STL 中的部分容器,比如:vector、list、deque、forward_list 等,这些容器统称为序列式容器,因为其底层为线性序列的数据结构,里面存储的是元素本身。那什么是关联式容器?它与序列式容器有什么区别?
关联式容器也是用来存储数据的,与序列式容器不同的是,其里面存储的是<key, value>结构的键值对,在数据检索时比序列式容器效率更高。
3. pair——键值对
键值对用来表示具有一一对应关系的一种结构,该结构中一般只包含两个成员变量 key 和 value,key 代表键值,value 表示与 key 对应的信息。
比如:现在要建立一个英汉互译的字典,那该字典中必然有英文单词与其对应的中文含义,而且,英文单词与其中文含义是一一对应的关系,即通过该应该单词,在词典中就可以找到与其对应的中文含义。SGI-STL 中关于键值对的定义:
template <class T1, class T2> struct pair {typedef T1 first_type;typedef T2 second_type;T1 first;T2 second;pair() : first(T1()), second(T2()){}pair(const T1& a, const T2& b) : first(a), second(b){} };解释:
- pair 有两个模板参数,分别命名为 T1 和 T2,用于表示键和值的类型。
- pair 有两个公有成员类型别名:first_type 和 second_type,分别表示键和值的类型。
- pair 有两个公有成员变量:first 和 second,用于存储键值对的具体值。
补充:
我们构造键值对时常调用 make_pair 函数,其定义为:
template <class T1, class T2> pair<T1, T2> make_pair(T1 x, T2 y) {return (pair<T1, T2>(x, y)); }
4. 树形结构的关联式容器
根据应用场景的不同,STL 总共实现了两种不同结构的关联式容器:树型结构与哈希结构。
树型结构的关联式容器主要有四种:map、set、multimap、multiset。
这四种容器的共同点是:使用平衡搜索树(即红黑树)作为其底层结构,容器中的元素是一个有序的序列。下面一依次介绍每一个容器。
4.1 set
4.1.1 set 的介绍
英文解释:
也就是说:
set 是按照一定次序存储元素的容器。
在 set 中,元素的 value 也是其标识符(value 就是 key ,类型为 T),并且每个 value 必须是唯一的。set 中的元素不能在容器中修改(元素总是 const),但是可以从容器中插入或删除它们。
在内部,set 中的元素总是按照其内部比较规则(类型为 Compare)所指示的特定严格弱排序准则进行排序。
set 容器通过 key 访问单个元素的速度通常比 unordered_set 容器慢,但它们允许根据顺序对子集进行直接迭代。
set 在底层是用二叉搜索树(红黑树)实现的。
注意:
与 map/multimap 不同,map/multimap 中存储的是真正的键值对 <key, value>,set 中只存放 value。
set 中插入元素时,只需要插入 value 即可,不需要构造键值对。
set 中的元素不可以重复(因此可以使用set进行去重)。
使用 set 的迭代器遍历 set 中的元素,可以得到有序序列。
set 中的元素默认按照小于来比较。
set 中查找某个元素,时间复杂度为: l o g 2 n log_2 n log2n。
set 中的元素不允许修改。
set 中的底层使用二叉搜索树(红黑树)来实现。

4.1.2 set 的使用
- set 的模板参数列表

说明:
T:set中存放元素的类型。
Compare:set 中元素默认按照小于来比较。
Alloc:set 中元素空间的管理方式,使用 STL 提供的空间配置器管理。
- set 的构造函数
| 函数声明 | 功能介绍 |
|---|---|
explicit set (const key_compare& comp = key_compare(), const allocator_type& alloc = allocator_type()); | 构造空的 set。 |
template <class InputIterator>set (InputIterator first, InputIterator last, const key_compare& comp = key_compare(), const allocator_type& alloc = allocator_type()); | 用 [first, last) 区间中的元素构造 set。 |
set (const set& x); | set 的拷贝构造。 |
-
set 的容量操作
函数名称 函数声明 功能介绍 empty bool empty() const;检测 set 是否为空,空返回 true,否则返回 false。 size size_t size() const;返回 set 中有效元素的个数。 -
set 的修改操作
函数名称 函数声明 功能介绍 insert pair<iterator,bool> insert (const value_type& val);在 set 中插入元素 val。如果插入成功,返回 <val 位置的迭代器,true>;如果插入失败,说明 val 在 set 中已经存在,返回 <val 位置的迭代器,false>。 erase void erase (iterator position);size_t erase (const value_type& val);删除 set 中 position 位置上的元素。
删除 set 中值为 val 的元素,返回删除的元素的个数(这里只会返回0或1)。swap void swap (set& x);与 x 交换元素。 clear void clear();将 set 的元素清空。 -
set 的其它操作
函数名称 函数声明 功能介绍 find iterator find (const value_type& val) const;在 set 中查找值为 val 的元素,如果找到则返回该元素位置的迭代器,未找到则返回 end 迭代器。 count size_t count (const value_type& val) const;返回 set 中值为 val 的元素的个数(这里只会返回0或1)。 -
set 的用法举例
代码举例:(相关说明在代码注释中)
#include <iostream> #include <set> using namespace std; void TestSet() {// 用数组array中的元素构造setint array[] = { 1,3,5,7,9,9,7,5,3,1 };set<int> s(array, array + sizeof(array) / sizeof(array[0]));cout << s.size() << endl;// 正向打印set中的元素,从打印结果中可以看出:set可去重for (auto& e : s)cout << e << " ";cout << endl;// 插入pair<set<int>::iterator, bool> p1 = s.insert(0);pair<set<int>::iterator, bool> p2 = s.insert(1);cout << "val: " << *(p1.first) << " bool: " << p1.second << endl; // 插入成功cout << "val: " << *(p2.first) << " bool: " << p2.second << endl; // 原容器中已存在1,插入失败// 查找+删除set<int>::iterator it = s.find(9);s.erase(it);s.erase(7);// 使用迭代器逆向打印set中的元素for (auto it = s.rbegin(); it != s.rend(); ++it)cout << *it << " ";cout << endl;// set中值为3的元素出现了几次cout << s.count(3) << endl; } int main() {TestSet();return 0; }运行结果:

4.2 map
4.2.1 map 的介绍
英文解释:
也就是说:
map 是关联容器,它按照特定的次序(按照 key 来比较)存储由键值 key 和值 value 组合而成的元素。
在 map 中,键值 key 通常用于排序和唯一地标识元素,而值 value 中存储与此键值 key 关联的内容。键值 key 和值 value 的类型可能不同,并且在 map 的内部,key 与 value 通过成员类型 value_type 绑定在一起:
pair: typedef pair<const key, T> value_type;在内部,map中的元素总是按照键值 key 进行比较排序的。
map 中通过键值访问单个元素的速度通常比 unordered_map 容器慢,但 map 允许根据顺序对元素进行直接迭代(即对 map 中的元素进行迭代时,可以得到一个有序的序列)。
map 支持下标访问符,即在 [] 中放入 key,就可以找到与 key 对应的 value。
map 通常被实现为二叉搜索树(红黑树)。
注意:
map 中的的元素是键值对。
map 中的 key 是唯一的,并且不能修改。
默认按照小于的方式对 key 进行比较。
map 中的元素如果用迭代器去遍历,可以得到一个有序的序列。
map 的底层为平衡搜索树(红黑树),查找效率为 O ( l o g 2 N ) O(log_2 N) O(log2N)。
支持 [] 操作符,operator[] 中实际进行插入查找。

4.2.2 map 的使用
-
map的模板参数列表

说明:
key:键值对中 key 的类型。
T:键值对中 value 的类型。
Compare:比较器的类型,map 中的元素是按照 key 来比较的,缺省情况下按照小于来比较,一般情况下(内置类型元素)该参数不需要传递,如果无法比较时(自定义类型),需要用户自己显式传递比较规则(一般情况下按照函数指针或者仿函数来传递)。
Alloc:通过空间配置器来申请底层空间,不需要用户传递,除非用户不想使用标准库提供的空间配置器。 -
map 的构造函数
函数声明 功能介绍 explicit map (const key_compare& comp = key_compare(), const allocator_type& alloc = allocator_type());构造空的 map。 template <class InputIterator>map (InputIterator first, InputIterator last, const key_compare& comp = key_compare(), const allocator_type& alloc = allocator_type());用 [first, last) 区间中的元素构造 map。 map (const map& x);map 的拷贝构造。 -
map 的容量操作
函数名称 函数声明 功能简介 empty bool empty ( ) const;检测 map 中的元素是否为空,是返回 true,否则返回 false。 size size_t size() const;返回 map 中有效元素的个数。 -
map 的元素访问操作
函数名称 函数声明 功能简介 operator[] mapped_type& operator[] (const key_type& k);返回 k 对应的 value。 at mapped_type& at (const key_type& k);const mapped_type& at (const key_type& k) const;返回 k 对应的 value。 区分:
在元素访问时,有一个与 operator[] 类似的操作 at 函数(该函数不常用),都是通过 key 找到与 key 对应的 value 然后返回其引用,不同的是:当 key 不存在时,operator[] 用默认 value 与 key 构造键值对然后插入,返回该默认 value;at 函数直接抛异常。
-
map 的修改操作
函数名称 函数声明 功能介绍 insert pair<iterator,bool> insert (const value_type& val);在 map 中插入键值对 val。如果插入成功,返回 <val 位置的迭代器,true>;如果插入失败,说明 val 在 map 中已经存在,返回 <val 位置的迭代器,false>。 erase void erase (iterator position);size_t erase (const key_type& k);删除 map 中 position 位置上的元素。
删除 map 中键值为 k 的元素,返回删除的元素的个数(这里只会返回0或1)。swap void swap (map& x);与 x 交换元素。 clear void clear();将 map 的元素清空。 -
map 的其它操作
函数名称 函数声明 功能介绍 find iterator find (const key_type& k);const_iterator find (const key_type& k) const;在 map 中查找 key 为 x 的元素,找到返回该元素位置的迭代器,否则返回 end。
在 map 中查找 key 为 x 的元素,找到返回该元素位置的 const 迭代器,否则返回 cend。count size_t count (const key_type& k) const;返回 map 中值为 k 的键值在 map 中的个数(这里只会返回0或1)。 -
map 的用法举例
代码举例:(相关说明在代码注释中)
#include <iostream> #include <string> #include <map> using namespace std; void TestMap() {map<string, string> m;// 向map中插入元素的方式:// 将键值对<"peach","桃子">插入map中,用pair直接来构造键值对m.insert(pair<string, string>("peach", "桃子"));// 将键值对<"peach","桃子">插入map中,用make_pair函数来构造键值对m.insert(make_pair("banan", "香蕉"));// 借用operator[]向map中插入元素/*operator[]的原理是:用<key, T()>构造一个键值对,然后调用insert()函数将该键值对插入到map中如果key已经存在,插入失败,insert函数返回该key所在位置的迭代器如果key不存在,插入成功,insert函数返回新插入元素所在位置的迭代器operator[]函数最后将insert返回值键值对中的value返回*/// 将<"apple", "">插入map中,插入成功,返回value的引用,将“苹果”赋值给该引用结果,m["apple"] = "苹果";// key不存在时抛异常//m.at("waterme") = "水蜜桃";cout << m.size() << endl;// 用迭代器去遍历map中的元素,可以得到一个按照key排序的序列for (auto& e : m)cout << e.first << "--->" << e.second << endl;cout << endl;// map中的键值对key一定是唯一的,如果key存在将插入失败auto ret = m.insert(make_pair("peach", "桃色"));if (ret.second)cout << "<peach, 桃色>不在map中, 已经插入" << endl;elsecout << "键值为peach的元素已经存在:" << ret.first->first << "--->"<< ret.first->second << " 插入失败" << endl;// 删除key为"apple"的元素m.erase("apple");if (1 == m.count("apple"))cout << "apple还在" << endl;elsecout << "apple被吃了" << endl; } int main() {TestMap();return 0; }输出结果:

4.3 multiset
4.3.1 multiset 的介绍
英文解释:
也就是说:
multiset 是按照特定顺序存储元素的容器,其中元素是可以重复的。
在 multiset 中,元素的 value 是其识别符(value 本身就是 key,key 就是 value,类型为 T)。 multiset 元素的值不能在容器中进行修改(因为元素总是 const 的),但可以从容器中插入或删除。
在内部,multiset 中的元素总是按照其内部比较规则(类型为 Compare)所指示的特定严格弱排序准则进行排序。
multiset 容器通过 key 访问单个元素的速度通常比 unordered_multiset 容器慢,但当使用迭代器遍历时会得到一个有序序列。
multiset 底层结构为二叉搜索树(红黑树)。
注意:
multiset 只存放 value。
multiset 只需要插入 value 即可,不需要构造键值对。
与 set 的区别是,multiset 中的元素可以重复,set 是中 value 是唯一的。
使用迭代器对 multiset 中的元素进行遍历,可以得到有序的序列。
multiset 中的元素不能修改。
在 multiset 中找某个元素,时间复杂度为 O ( l o g 2 N ) O(log_2 N) O(log2N)。
multiset 的作用:可以对元素进行排序。

4.3.2 multiset 的使用
此处只简单演示 set 与 multiset 的不同,其他接口接口与 set 相同,可参考 set。
#include <iostream> using namespace std; #include <set> void TestMultiset() {int array[] = { 2,1,3,9,6,0,5,8,4,7,7,9,3,1,5 };// multiset 中的元素可以重复multiset<int> s(array, array + sizeof(array) / sizeof(array[0]));for (auto& e : s)cout << e << " ";cout << endl;return; } int main() {TestMultiset();return 0; }输出结果:

4.4 multimap
4.4.1 multimap 的介绍
英文解释:
也就是说:
multimap 是关联式容器,它按照特定的顺序,存储由 key 和 value 映射成的键值对 <key, value>,其中多个键值对之间的 key 是可以重复的。
在 multimap 中,通常按照 key 排序和唯一地标识元素,而映射的 value 存储与 key 关联的内容。key 和 value 的类型可能不同,通过 multimap 内部的成员类型 value_type 组合在一起,value_type是组合key和value的键值对:
typedef pair<const Key, T> value_type;在内部,multimap 中的元素总是通过其内部比较对象,按照指定的特定严格弱排序标准对 key 进行排序的。
multimap 通过 key 访问单个元素的速度通常比 unordered_multimap 容器慢,但是使用迭代器直接遍历 multimap 中的元素可以得到关于 key 有序的序列。
multimap 在底层用二叉搜索树(红黑树)来实现。
注意:
multimap 中的 key 是可以重复的。
multimap 中的元素默认将 key 按照小于来比较。
multimap 中没有重载 operator[] 操作。
使用时与map包含的头文件相同。

4.4.2 multimap 的使用
multimap 中的接口可以参考 map,功能都是类似的。不同点就是 multimap 中没有 operator[] ,key 值可以重复。此处只简单演示一下不同点。
#include <iostream> using namespace std; #include <map> void TestMultimap() {multimap<string, string> m;m.insert(make_pair("sort", "种类"));m.insert(make_pair("sort", "排序"));m.insert(make_pair("left", "左边"));m.insert(make_pair("left", "离开"));m.insert(make_pair("apple", "苹果"));for (auto& e : m)cout << e.first << "--->" << e.second << endl;return; } int main() {TestMultimap();return 0; }输出结果:

5. 底层结构
5.1 AVL 树
5.1.1 AVL 树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家 G.M.Adelson-Velskii 和 E.M.Landis 在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
它的左右子树都是 AVL 树。
左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)。
如果一棵二叉搜索树是高度平衡的,它就是 AVL 树。如果它有 n 个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。

5.1.2 AVL 树节点的定义
template<class K, class V> struct AVLTreeNode {AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){} };
AVLTreeNode中的成员包括:
_left:指向左子节点的指针。_right:指向右子节点的指针。_parent:指向父节点的指针。_kv:存储键值对的pair对象,其中键的类型为K,值的类型为V。_bf:平衡因子,用于表示节点的平衡状态。
5.1.3 AVL 树的插入
AVL 树就是在二叉搜索树的基础上引入了平衡因子,因此 AVL 树也可以看成是二叉搜索树。那么 AVL 树的插入过程可以分为两步:
按照二叉搜索树的方式插入新节点。
调整节点的平衡因子。
代码实现:(相关说明在代码注释中)
bool Insert(const pair<K, V>& kv) {// 1. 先按照二叉搜索树的规则将节点插入到AVL树中if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}// 2. 新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,// 并检测是否破坏了AVL树的平衡性/*cur插入后,parent的平衡因子一定需要调整,在插入之前,parent的平衡因子分为三种情况:-1,0, 1, 分以下两种情况:1. 如果cur插入到parent的左侧,只需给parent的平衡因子-1即可2. 如果cur插入到parent的右侧,只需给parent的平衡因子+1即可此时:parent的平衡因子可能有三种情况:0,正负1, 正负21. 如果parent的平衡因子为0,说明插入之前parent的平衡因子为正负1,插入后被调整成0,此时满足AVL树的性质,插入成功2. 如果parent的平衡因子为正负1,说明插入前parent的平衡因子一定为0,插入后被更新成正负1,此时以parent为根的树的高度增加,需要继续向上更新3. 如果parent的平衡因子为正负2,则parent的平衡因子违反平衡树的性质,需要对其进行旋转处理,具体细节请看后文*/while (parent){if (cur == parent->_left){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}break;}else{assert(false);}}return true; }
5.1.4 AVL 树的旋转
如果在一棵原本是平衡的 AVL 树中插入一个新节点,可能造成不平衡,此时必须调整树的结构,使之平衡化。根据节点插入位置的不同,AVL 树的旋转分为四种:
- 新节点插入较高左子树的左侧—左左:右单旋
代码实现:(相关说明在代码注释中)
/* 上图在插入前,AVL树是平衡的,新节点插入到30的左子树(注意:此处不是左孩子)中,30左 子树增加了一层,导致以60为根的二叉树不平衡,要让60平衡,只能将60左子树的高度减少一层, 右子树增加一层,即将左子树往上提,这样60转下来,因为60比30大,只能将其放在30的右子树, 而如果30有右子树,右子树根的值一定大于30,小于60,只能将其放在60的左子树,旋转完成后, 更新节点的平衡因子即可。在旋转过程中,有以下几种情况需要考虑: 1. 30节点的右孩子可能存在,也可能不存在 2. 60可能是根节点,也可能是子树 如果是根节点,旋转完成后,要更新根节点 如果是子树,可能是某个节点的左子树,也可能是右子树 */ void RotateR(Node* parent) {// subL: parent的左孩子// subLR: parent左孩子的右孩子Node* subL = parent->_left;Node* subLR = subL->_right;// 30的右孩子作为双亲的左孩子parent->_left = subLR;// 如果60的左孩子的右孩子存在,更新节点双亲if (subLR)subLR->_parent = parent;// 60作为30的右孩子subL->_right = parent;// 因为60可能是棵子树,因此在更新其双亲前必须先保存60的双亲Node* grandparent = parent->_parent;// 更新60的双亲parent->_parent = subL;// 如果60是根节点,更新指向根节点的指针if (_root == parent){_root = subL;// 更新30的双亲subL->_parent = nullptr;}else{// 如果60是子树,可能是其双亲的左子树,也可能是右子树if (grandparent->_left == parent){grandparent->_left = subL;}else{grandparent->_right = subL;}// 更新30的双亲subL->_parent = grandparent;}// 根据调整后的结构更新部分节点的平衡因子subL->_bf = parent->_bf = 0; }
- 新节点插入较高右子树的右侧—右右:左单旋
实现及情况考虑可参考右单旋。代码会在最后整体给出。
- 新节点插入较高左子树的右侧—左右:先左单旋再右单旋
将双旋变成单旋后再旋转,即:先对30进行左单旋,然后再对90进行右单旋,旋转完成后再考虑平衡因子的更新。
代码实现:(相关说明已在代码注释中)
// 旋转之前,60的平衡因子可能是-1/0/1,旋转完成之后,根据情况对其他节点的平衡因子进行调整 void RotateLR(Node* parent) {Node* subL = parent->_left;Node* subLR = subL->_right;// 旋转之前,保存subLR的平衡因子,旋转完成之后,需要根据该平衡因子来调整其他节点的平衡因子int bf = subLR->_bf;// 先对30进行左单旋RotateL(subL);// 再对90进行右单旋RotateR(parent);if (0 == bf){// subLR自己就是新增parent->_bf = subL->_bf = subLR->_bf = 0;}else if (-1 == bf){// subLR的左子树新增parent->_bf = 1;subLR->_bf = 0;subL->_bf = 0;}else if (1 == bf){// subLR的右子树新增parent->_bf = 0;subLR->_bf = 0;subL->_bf = -1;}else{assert(false);} }
- 新节点插入较高右子树的左侧—右左:先右单旋再左单旋
参考右左双旋。代码会在最后整体给出。




总结:
假如以 parent 为根的子树不平衡,即 parent 的平衡因子为2或者-2,分以下情况考虑
- parent 的平衡因子为2,说明 parent 的右子树高,设 parent 的右子树的根为 subR:
- 当 subR 的平衡因子为1时,执行左单旋。
- 当 subR 的平衡因子为-1时,执行右左双旋。
- parent 的平衡因子为-2,说明 parent 的左子树高,设 parent 的左子树的根为 subL:
- 当 subL 的平衡因子为-1是,执行右单旋。
- 当 subL 的平衡因子为1时,执行左右双旋。
旋转完成后,原 parent 为根的子树个高度降低,已经平衡,不需要再向上更新。
5.1.5 AVL 树的验证
AVL 树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证 AVL 树,可以分两步:
- 验证其为二叉搜索树
如果中序遍历可得到一个有序的序列,就说明为二叉搜索树。
- 验证其为平衡树
每个节点子树高度差的绝对值不超过1(注意节点中如果没有平衡因子)节点的平衡因子是否计算正确。
代码实现:(相关说明在代码注释中)
bool _IsBalance(Node* root) {// 空树也是AVL树if (root == nullptr)return true;// 计算root节点的平衡因子:即root左右子树的高度差int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);// 如果计算出的平衡因子与root的平衡因子不相等,则一定不是AVL树if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}// root平衡因子的绝对值超过1,则一定不是AVL树// root的左和右如果都是AVL树,则该树一定是AVL树return abs(rightHeight - leftHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right); }bool IsBalance() {return _IsBalance(_root); }
5.1.6 AVL 树的删除(了解)
因为 AVL 树也是二叉搜索树,可按照二叉搜索树的方式将节点删除,然后再更新平衡因子,只不错与删除不同的时,删除节点后的平衡因子更新,最差情况下一直要调整到根节点的位置。
具体实现可参考:平衡二叉树。
5.1.7 AVL 树全部代码
#pragma once
#include<assert.h>template<class K, class V>
struct AVLTreeNode
{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent){if (cur == parent->_left){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}break;}else{assert(false);}}return true;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if(subRL)subRL->_parent = parent;Node* grandparent = parent->_parent;subR->_left = parent;parent->_parent = subR;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subR;}else{grandparent->_right = subR;}subR->_parent = grandparent;}subR->_bf = parent->_bf = 0;}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* grandparent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subL;}else{grandparent->_right = subL;}subL->_parent = grandparent;}subL->_bf = parent->_bf = 0;}void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(subR);RotateL(parent);if (0 == bf){// subRL自己就是新增parent->_bf = subR->_bf = subRL->_bf = 0;}else if (-1 == bf){// subRL的左子树新增parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;}else if (1 == bf){// subRL的右子树新增parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;}else{assert(false);}}void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(subL);RotateR(parent);if (0 == bf){// subLR自己就是新增parent->_bf = subL->_bf = subLR->_bf = 0;}else if (-1 == bf){// subLR的左子树新增parent->_bf = 1;subLR->_bf = 0;subL->_bf = 0;}else if (1 == bf){// subLR的右子树新增parent->_bf = 0;subLR->_bf = 0;subL->_bf = -1;}else{assert(false);}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}bool IsBalance(){return _IsBalance(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}bool _IsBalance(Node* root){if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}private:Node* _root = nullptr;
};
5.1.8 AVL 树的性能
AVL 树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。但是如果要对 AVL 树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑 AVL 树,但一个结构经常修改,就不太适合。
5.2 红黑树
5.2.1 红黑树的概念
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是 Red 或 Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。
如图所示:

5.2.2 红黑树的性质
每个结点不是红色就是黑色。
根节点是黑色的。
如果一个节点是红色的,则它的两个孩子结点是黑色的。
对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点。
每个叶子结点都是黑色的(此处的叶子结点指的是空结点)。
5.2.3 红黑树节点的定义
enum Colour {RED,BLACK };template<class K, class V> struct RBTreeNode {RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Colour _col;RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED){} };
RBTreeNode中的成员包括:
_left:指向左子节点的指针。_right:指向右子节点的指针。_parent:指向父节点的指针。_kv:存储键值对的pair对象,其中键的类型为K,值的类型为V。_col:节点的颜色,用枚举类型Colour表示,可能的取值为RED和BLACK。构造函数默认将 _col 初始化为 RED。
5.2.4 红黑树的插入
红黑树是在二叉搜索树的基础上加上其平衡限制条件,因此红黑树的插入可分为两步:
按照二叉搜索的树规则插入新节点。
检测新节点插入后,红黑树的性质是否造到破坏。
因为新节点的默认颜色是红色,因此,如果其双亲节点的颜色是黑色,没有违反红黑树任何性质,则不需要调整;但当新插入节点的双亲节点颜色为红色时,就违反了性质三不能有连在一起的红色节点,此时需要对红黑树分情况来讨论:
约定:cur 为当前节点,p 为父节点,g 为祖父节点,u 为叔叔节点。
情况一:cur 为红,p 为红,g 为黑,u 存在且为红。
解决方式:将 p,u 改为黑,g 改为红,然后把 g 当成 cur,继续向上调整。
情况二:cur 为红,p 为红,g 为黑,u 不存在或者 u 存在且为黑。
解决方式:p 为 g 的左孩子,cur 为 p 的左孩子,则针对 p 进行右单旋转;相反,p 为 g 的右孩子,cur 为 p 的右孩子,则针对 p 进行左单旋转。p,g 变色,p 变黑,g 变红。
情况三:cur 为红,p 为红,g 为黑,u 不存在或者 u 存在且为黑。
解决方式:p 为 g 的左孩子,cur 为 p 的右孩子,则针对 p 进行左单旋转;相反,p 为 g 的右孩子,cur 为 p 的左孩子,则针对 p 进行右单旋转,此时转换成了情况2。
针对每种情况进行相应的处理即可。
代码实现:(相关说明在代码注释中)
bool Insert(const pair<K, V>& kv) {// 1. 先按照二叉搜索树的规则将节点插入到红黑树中if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);cur->_col = RED;if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}// 2. 检测新节点插入后,红黑树的性质是否造到破坏。while (parent && parent->_col == RED){Node* grandparent = parent->_parent;if (parent == grandparent->_left){// g// p u// cNode* uncle = grandparent->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上更新处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}else // parent == grandparent->_right{// g// u p // cNode* uncle = grandparent->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_right){// 单旋// g// p// cRotateL(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p // cRotateR(parent);RotateL(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}}_root->_col = BLACK;return true; }


5.2.5 红黑树的验证
红黑树的检测分为两步:
检测其是否满足二叉搜索树(中序遍历是否为有序序列)。
检测其是否满足红黑树的性质。
代码实现:(相关说明在代码注释中)
bool Check(Node* root, int blacknum, const int refVal) {//走到 null 之后,判断blacknum和refVal是否相等if (root == nullptr){if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}// 检测当前节点与其双亲是否都为红色if (root->_col == RED && root->_parent->_col == RED){cout << "有连续的红色节点" << endl;return false;}// 统计黑色节点的个数if (root->_col == BLACK){++blacknum;}return Check(root->_left, blacknum, refVal)&& Check(root->_right, blacknum, refVal); } bool IsBalance() {// 空树也是红黑树if (_root == nullptr)return true;// 检测根节点是否满足情况if (_root->_col == RED){cout << "根节点必须为黑色" << endl;return false;}// 获取任意一条路径中黑色节点的个数int refVal = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refVal;}cur = cur->_left;}// 检测是否满足红黑树的性质,blacknum用来记录路径中黑色节点的个数int blacknum = 0;return Check(_root, blacknum, refVal); }
5.2.6 红黑树的删除(了解)
红黑树的删除本节不做讲解,具体实现可参考:红黑树。
5.2.7 红黑树全部代码
#pragma once
#include <assert.h>enum Colour
{RED,BLACK
};template<class K, class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Colour _col;RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED){}
};template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);cur->_col = RED;if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent && parent->_col == RED){Node* grandparent = parent->_parent;if (parent == grandparent->_left){// g// p u// cNode* uncle = grandparent->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上更新处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}else // parent == grandparent->_right{// g// u p // cNode* uncle = grandparent->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_right){// 单旋// g// p// cRotateL(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p // cRotateR(parent);RotateL(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}}_root->_col = BLACK;return true;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* grandparent = parent->_parent;parent->_parent = subR;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subR;}else{grandparent->_right = subR;}subR->_parent = grandparent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* grandparent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subL;}else{grandparent->_right = subL;}subL->_parent = grandparent;}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}bool Check(Node* root, int blacknum, const int refVal){if (root == nullptr){if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "有连续的红色节点" << endl;return false;}if (root->_col == BLACK){++blacknum;}return Check(root->_left, blacknum, refVal)&& Check(root->_right, blacknum, refVal);}bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED){cout << "根节点必须为黑色" << endl;return false;}// 参考值int refVal = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refVal;}cur = cur->_left;}int blacknum = 0;return Check(_root, blacknum, refVal);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}size_t Size(){return _Size(_root);}size_t _Size(Node* root){if (root == NULL)return 0;return _Size(root->_left)+ _Size(root->_right) + 1;}bool Empty(){return _root == nullptr;}Node* Find(const K& key){Node* cur = _root;while (cur){if (cur->_kv.first < key){cur = cur->_right;}else if (cur->_kv.first > key){cur = cur->_left;}else{return cur;}}return NULL;}private:Node* _root = nullptr;
};
5.2.8 红黑树与 AVL 树的比较
红黑树和 AVL 树都是高效的平衡二叉树,增删改查的时间复杂度都是O( l o g 2 N log_2 N log2N),红黑树不追求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,所以在经常进行增删的结构中性能比 AVL 树更优,而且红黑树实现比较简单,所以实际运用中红黑树更多。
5.3 红黑树模拟实现 STL 中的 map 与 set
5.3.1 迭代器实现
template<class T>
struct __TreeIterator
{typedef RBTreeNode<T> Node;typedef __TreeIterator<T> Self;Node* _node;__TreeIterator(Node* node):_node(node){}T& operator*(){return _node->_data;}T* operator->(){return &_node->_data;}Self& operator--(){if (_node->_left){// 上一个就是左子树的最右节点Node* cur = _node->_left;while (cur->_right){cur = cur->_right;}_node = cur;}else{// 左为空,找孩子是父亲右的那个父亲结点Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_left){cur = parent;parent = parent->_parent;}assert(parent);_node = parent;}return *this;}Self& operator++(){assert(_node);if (_node->_right){// 下一个就是右子树的最左节点Node* cur = _node->_right;while (cur->_left){cur = cur->_left;}_node = cur;}else{// 右为空,找孩子是父亲左的那个父亲结点Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}
};
5.3.2 改造红黑树
为了方便封装 map 和 set,我们插入了迭代器的操作,然后将之前节点的模板参数
<K, V>改成<T>,将红黑树的模板参数<K, V>改成<K, T, KeyOfT>,解释如下:
k:key 的类型。T:如果是 map,则为 pair<K, V>;如果是 set,则为 k。KeyOfT:通过 T 来获取 key 的一个仿函数类。改造后代码实现:
// 文件名:RBTree.h enum Colour {RED,BLACK };template<class T> struct RBTreeNode {RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){} };template<class K, class T, class KeyOfT> class RBTree {typedef RBTreeNode<T> Node; public:typedef __TreeIterator<T> iterator;iterator begin(){Node* cur = _root;while (cur && cur->_left){cur = cur->_left;}return iterator(cur);}iterator end(){return iterator(nullptr);}pair<iterator, bool> Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(iterator(_root), true);}Node* parent = nullptr;Node* cur = _root;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(iterator(cur), false);}}cur = new Node(data);Node* newnode = cur;cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent && parent->_col == RED){Node* grandparent = parent->_parent;if (parent == grandparent->_left){// g// p u// cNode* uncle = grandparent->_right;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上更新处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_left){// 单旋// g// p// cRotateR(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p// cRotateL(parent);RotateR(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}else // parent == grandparent->_right{// g// u p // cNode* uncle = grandparent->_left;if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandparent->_col = RED;// 继续往上处理cur = grandparent;parent = cur->_parent;}else{if (cur == parent->_right){// 单旋// g// p// cRotateL(grandparent);parent->_col = BLACK;grandparent->_col = RED;}else{// 双旋// g// p // cRotateR(parent);RotateL(grandparent);cur->_col = BLACK;grandparent->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(iterator(newnode), true);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* grandparent = parent->_parent;parent->_parent = subR;if (subRL)subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subR;}else{grandparent->_right = subR;}subR->_parent = grandparent;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* grandparent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (grandparent->_left == parent){grandparent->_left = subL;}else{grandparent->_right = subL;}subL->_parent = grandparent;}}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << kot(root->_data) << " ";_InOrder(root->_right);}bool Check(Node* root, int blacknum, const int refVal){if (root == nullptr){if (blacknum != refVal){cout << "存在黑色节点数量不相等的路径" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "有连续的红色节点" << endl;return false;}if (root->_col == BLACK){++blacknum;}return Check(root->_left, blacknum, refVal)&& Check(root->_right, blacknum, refVal);}bool IsBalance(){if (_root == nullptr)return true;if (_root->_col == RED)return false;// 参考值int refVal = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK){++refVal;}cur = cur->_left;}int blacknum = 0;return Check(_root, blacknum, refVal);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}size_t Size(){return _Size(_root);}size_t _Size(Node* root){if (root == NULL)return 0;return _Size(root->_left)+ _Size(root->_right) + 1;}bool Empty(){return _root == nullptr;}Node* Find(const K& key){Node* cur = _root;while (cur){if (kot(cur->_data) < key){cur = cur->_right;}else if (kot(cur->_data) > key){cur = cur->_left;}else{return cur;}}return nullptr;}private:Node* _root = nullptr;KeyOfT kot; };
5.3.3 map 的模拟实现
map 的底层结构就是红黑树,因此在 map 中直接封装一棵红黑树,然后将其接口包装下即可。
代码实现如下:
#pragma once #include "RBTree.h"namespace my_map {template<class K, class V>class map{public:struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};// 对类模板取内嵌类型,加typename告诉编译器这里是类型typedef typename RBTree<K, pair<K, V>, MapKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.Insert(kv);}size_t size(){return _t.Size();}bool empty(){return _t.Empty();}iterator find(const K& key){return iterator(_t.Find(key));}private:RBTree<K, pair<K, V>, MapKeyOfT> _t;}; }
5.3.4 set 的模拟实现
set 的底层为红黑树,因此只需在 set 内部封装一棵红黑树,然后将其接口包装下即可。
代码实现如下:
#pragma once #include"RBTree.h"namespace my_set {template<class K>class set{public:struct SetKeyOfT{const K& operator()(const K& key){return key;}};// 对类模板取内嵌类型,加typename告诉编译器这里是类型typedef typename RBTree<K, K, SetKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}pair<iterator, bool> insert(const K& key){return _t.Insert(key);}size_t size(){return _t.Size;}bool empty(){return _t.Empty();}iterator find(const K& key){return iterator(_t.Find(key));}private:RBTree<K, K, SetKeyOfT> _t;}; }
相关文章:

C++ pair+map+set+multimap+multiset+AVL树+红黑树(深度剖析)
文章目录 1. 前言2. 关联式容器3. pair——键值对4. 树形结构的关联式容器4.1 set4.1.1 set 的介绍4.1.2 set 的使用 4.2 map4.2.1 map 的介绍4.2.2 map 的使用 4.3 multiset4.3.1 multiset 的介绍4.3.2 multiset 的使用 4.4 multimap4.4.1 multimap 的介绍4.4.2 multimap 的使…...
指针的学习1
目录 什么是指针? 野指针 造成野指针的原因: 如何避免野指针? 内存和指针 如何理解编址? 指针变量和地址 取地址操作符& 指针变量和解引用操作符 指针变量 如何拆解指针类型? 指针变量的大小 指针变量…...

c++:敲桌子
先输出1-100数字,从100个数字中找到这些特殊数字改为敲桌子。 特殊数字:1.7的倍数 2.十位数上有7 3.个位数上有7 #include<iostream> using namespace std; int main() {for (int i 1; i < 100; i) {if (i / 10 7 || i % 10 7|| i % 7 0)…...

Linux中判断文件系统的方法
文章目录 Linux中判断文件系统的方法1.使用mount命令2.使用blkid命令3.使用file命令4.使用fstab文件5.使用df命令(这个用的比较多)6.使用fsck命令7.使用lsblk命令(推荐-简单好用) Linux中判断文件系统的方法 1.使用mount命令 # 这样查看的只有已经挂载…...
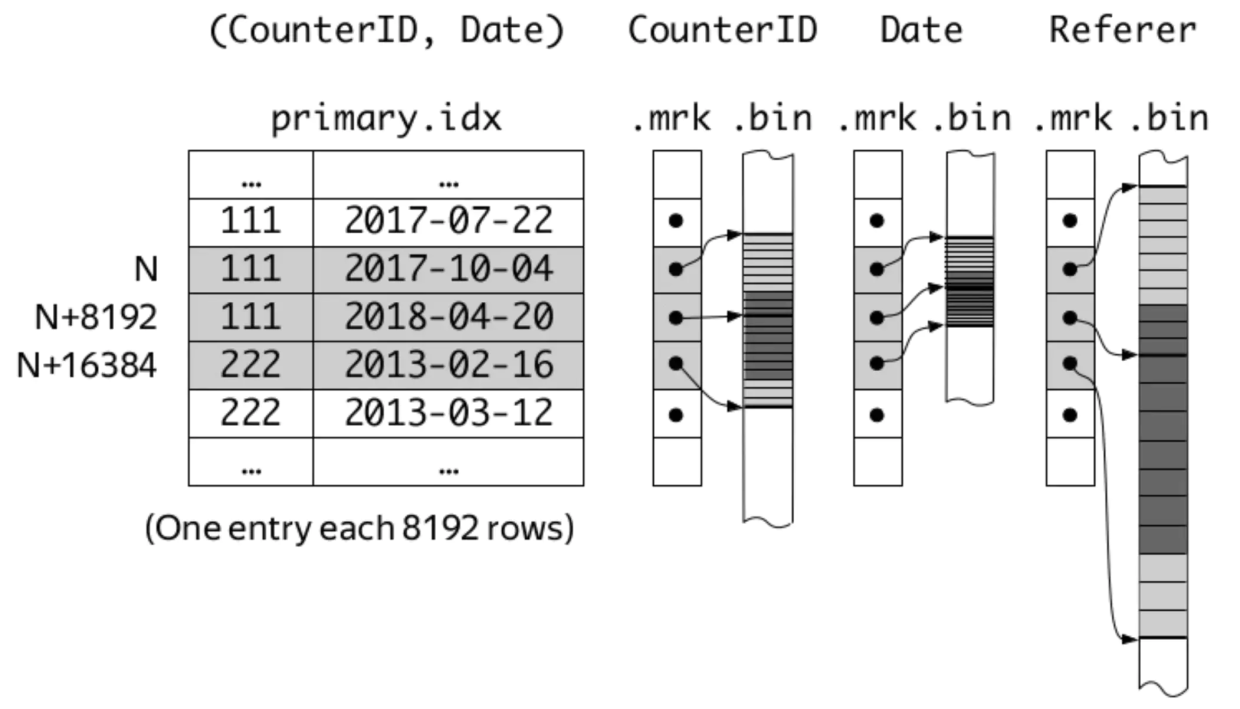
聊聊ClickHouse MergeTree引擎的固定/自适应索引粒度
前言 我们在刚开始学习ClickHouse的MergeTree引擎时,就会发现建表语句的末尾总会有SETTINGS index_granularity 8192这句话(其实不写也可以),表示索引粒度为8192。在每个data part中,索引粒度参数的含义有二…...
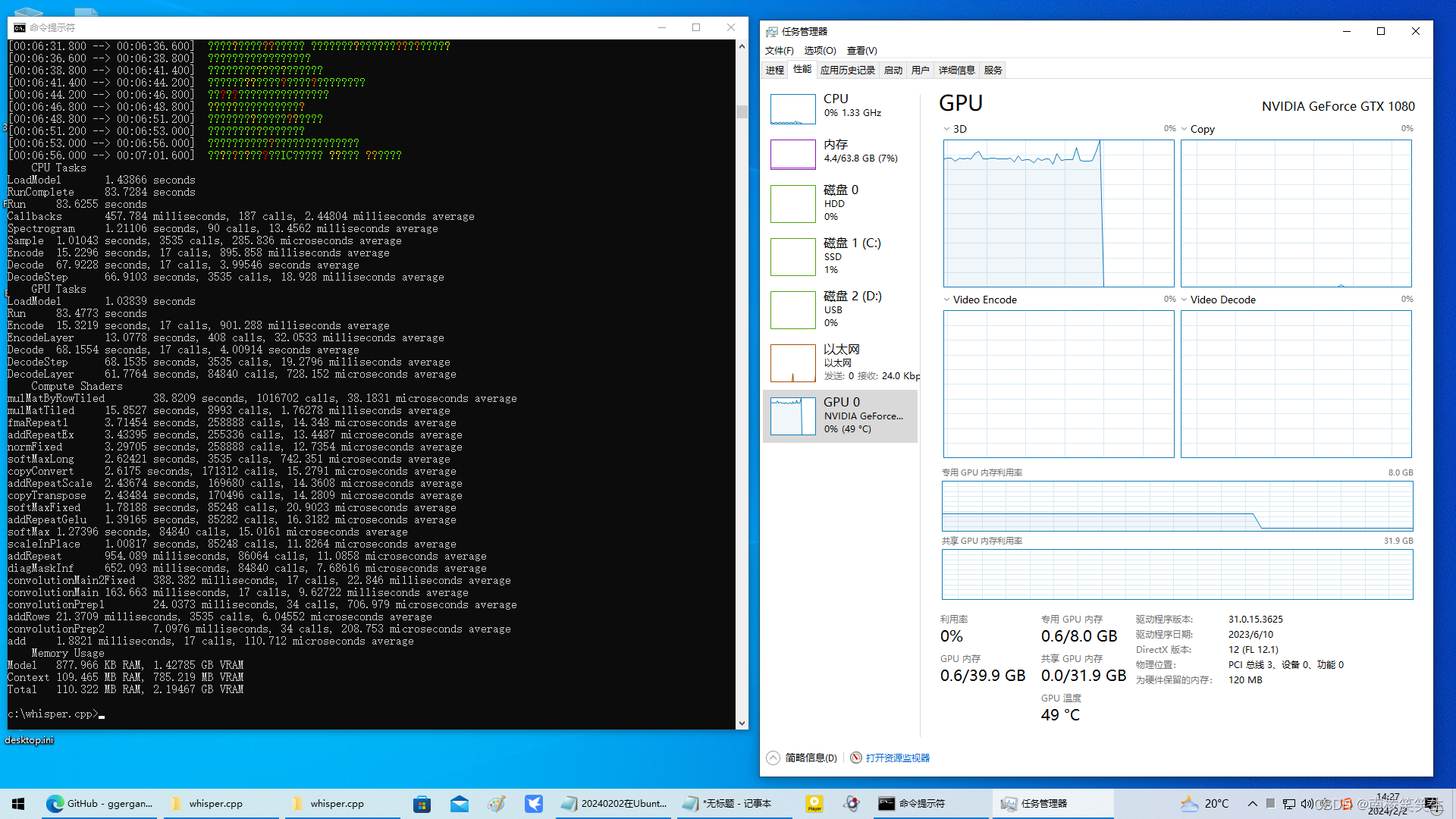
20240202在WIN10下使用whisper.cpp
20240202在WIN10下使用whisper.cpp 2024/2/2 14:15 【结论:在Windows10下,确认large模式识别7分钟中文视频,需要83.7284 seconds,需要大概1.5分钟!效率太差!】 83.7284/4200.1993533333333333333333333333…...
【Linux】基本指令(上)
🦄个人主页:修修修也 🎏所属专栏:Linux ⚙️操作环境:Xshell (操作系统:CentOS 7.9 64位) 目录 Xshell快捷键 Linux基本指令 ls指令 pwd指令 cd指令 touch指令 mkdir指令 rmdir指令/rm指令 结语 Xshell快捷键 AltEnter 全屏/取消全屏 Tab 进…...

【DB2】—— 一次关于db2 sqlcode -420 22018的记录
情况描述 在DB2 10.5数据库中执行以下SQL语句: SELECT * FROM aa WHERE aa.ivc_typ IN (213,123,12334,345)其中aa.ivc_typ列的类型为VARCHAR(10) 关于执行会发生以下情况 类型转换:SQL引擎会尝试把IN列表中的整数常量转换为VARCHAR(10)类型…...
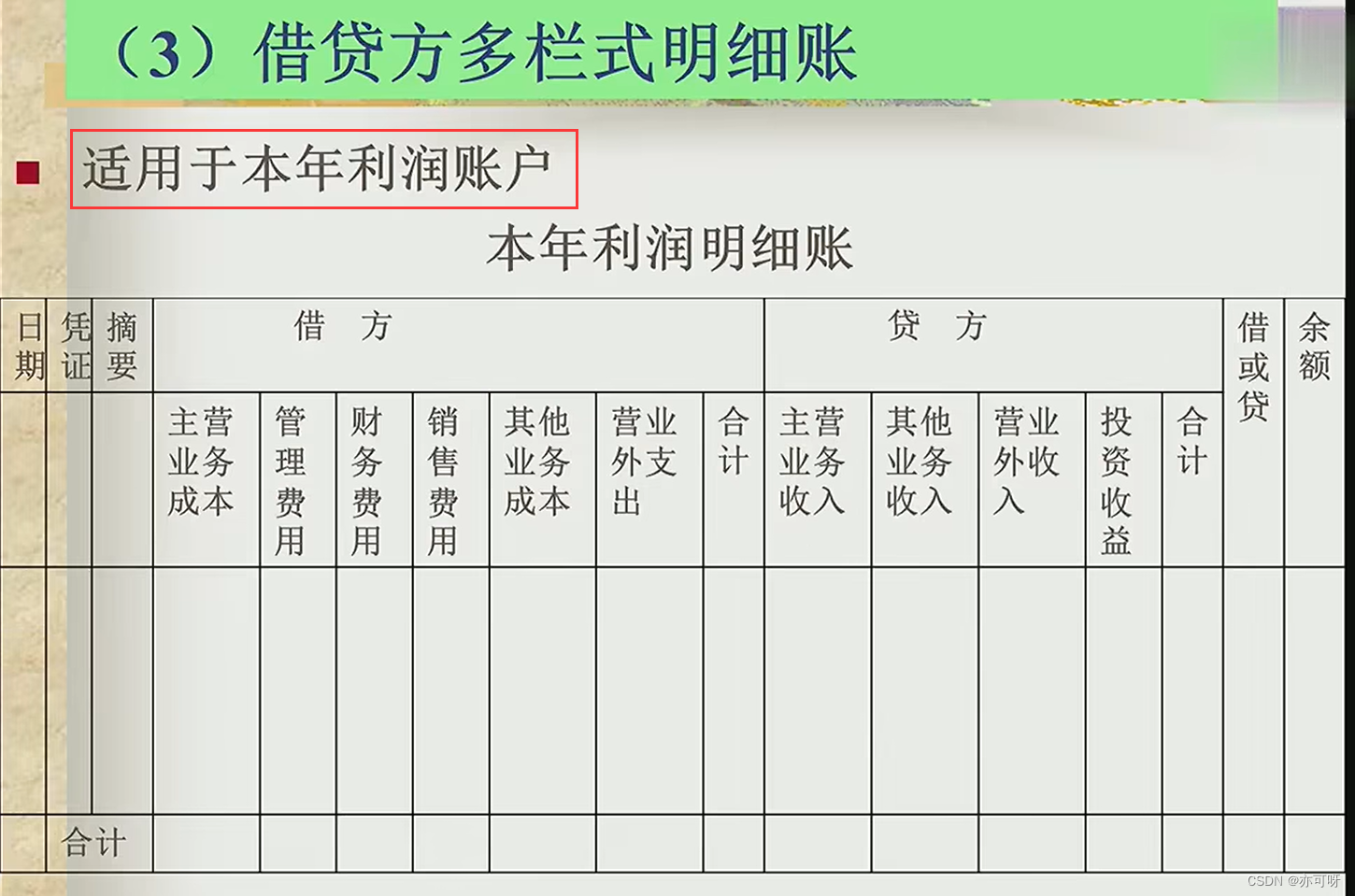
账簿和明细账
目录 一. 账簿的意义和种类二. 明细账 \quad 一. 账簿的意义和种类 \quad 账簿是由一定格式、互有联系的账页组成,以审核无误的会计凭证为依据,用来序时地、分类地记录和反映各项经济业务的会计簿籍(或称账本)。设置和登记账簿是会计工作的重…...
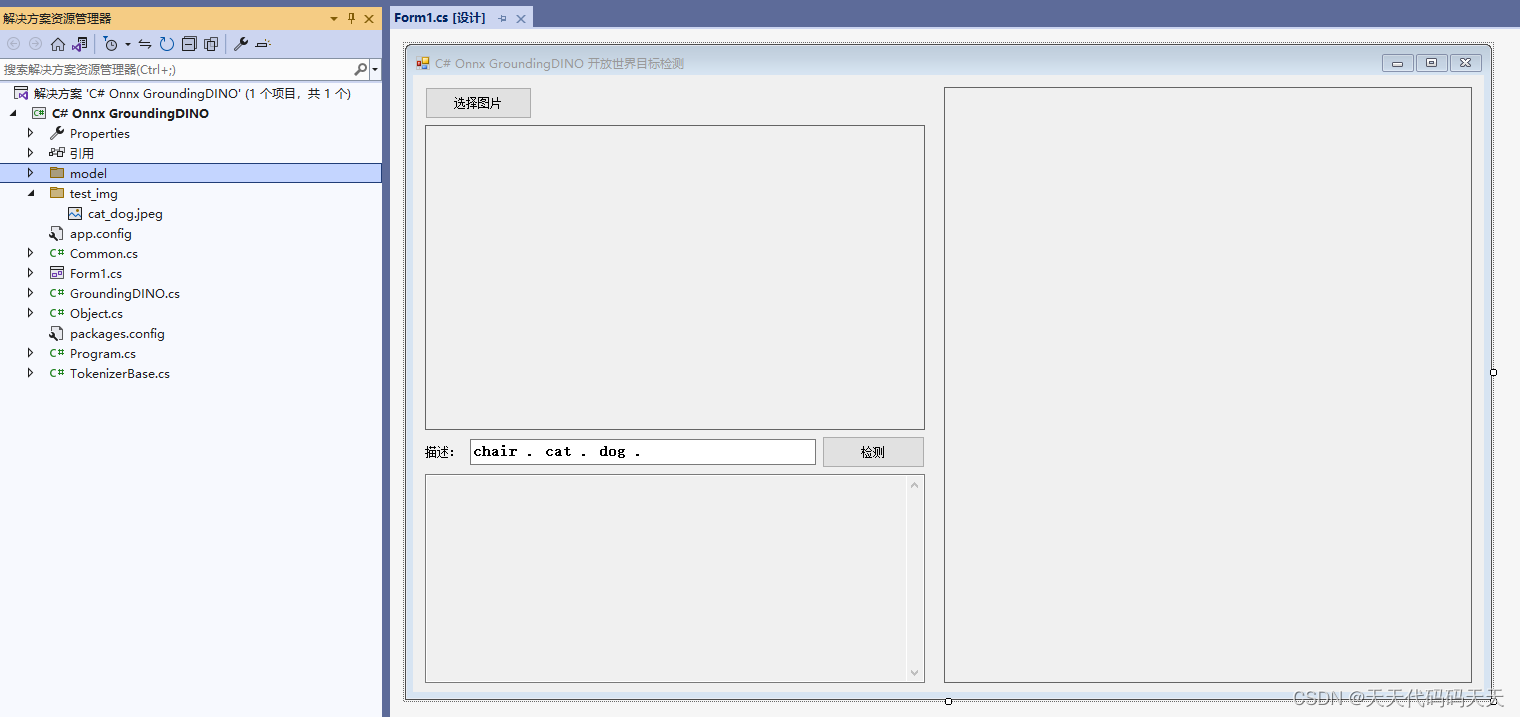
C# Onnx GroundingDINO 开放世界目标检测
目录 介绍 效果 模型信息 项目 代码 下载 介绍 地址:https://github.com/IDEA-Research/GroundingDINO Official implementation of the paper "Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection" 效果 …...
PyCharm / DataSpell 导入WSL2 解析器,实现GPU加速
PyCharm / DataSpell 导入WSL2 解析器的实现 Windows的解析器不好么?设置WSL2和实现GPU加速为PyCharm / DataSpell 设置WSL解析器设置Interpreter Windows的解析器不好么? Windows上的解析器的确很方便,也省去了我们很多的麻烦。但是WSL2的解…...
Android矩阵Matrix裁切setRectToRect拉伸Bitmap替代Bitmap.createScaledBitmap缩放,Kotlin
Android矩阵Matrix裁切setRectToRect拉伸Bitmap替代Bitmap.createScaledBitmap缩放,Kotlin class MyImageView : AppCompatImageView {private var mSrcBmp: Bitmap? nullprivate var testIV: ImageView? nullconstructor(ctx: Context, attrs: AttributeSet) :…...

TensorFlow2实战-系列教程11:RNN文本分类3
🧡💛💚TensorFlow2实战-系列教程 总目录 有任何问题欢迎在下面留言 本篇文章的代码运行界面均在Jupyter Notebook中进行 本篇文章配套的代码资源已经上传 6、构建训练数据 所有的输入样本必须都是相同shape(文本长度,…...

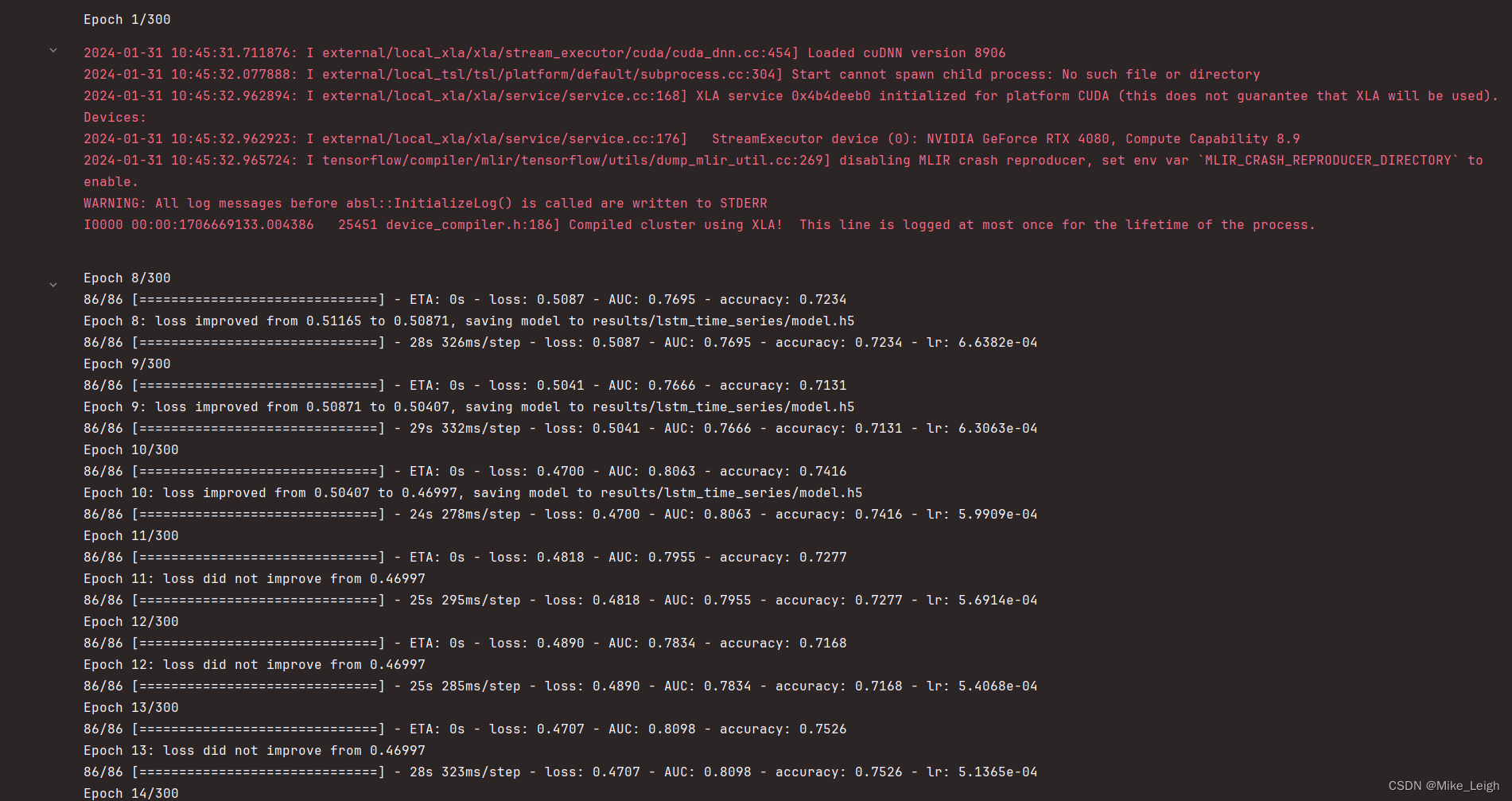
故障诊断 | 一文解决,RF随机森林的故障诊断(Matlab)
效果一览 文章概述 故障诊断 | 一文解决,RF随机森林的故障诊断(Matlab) 模型描述 随机森林(Random Forest)是一种集成学习(Ensemble Learning)方法,常用于解决分类和回归问题。它由多个决策树组成,每个决策树都独立地对数据进行训练,并且最终的预测结果是由所有决策…...

DAO设计模式
概念:DAO(Data Access Object) 数据库访问对象,**面向数据库SQL操作**的封装。 (一)场景 问题分析 在实际开发中,针对一张表的复杂业务功能通常需要和表交互多次(比如转账)。如果每次针对表的…...

【Midjourney】新手指南:参数设置
1.--aspect 或 --ar 用于设置图片长宽比,例如 --ar 16:9就是设置图片宽为16,高为9 2.--chaos 用于设置躁点,噪点值越高随机性越大,取值为0到100,例如 --chaos 50 3.--turbo 覆盖seetings的设置并启用极速模式生成…...

阿里云a10GPU,centos7,cuda11.2环境配置
Anaconda3-2022.05-Linux-x86_64.sh gcc升级 centos7升级gcc至8.2_centos7 yum gcc8.2.0-CSDN博客 paddlepaddle python -m pip install paddlepaddle-gpu2.5.1.post112 -f https://www.paddlepaddle.org.cn/whl/linux/mkl/avx/stable.html 报错 ImportError: libssl.so…...
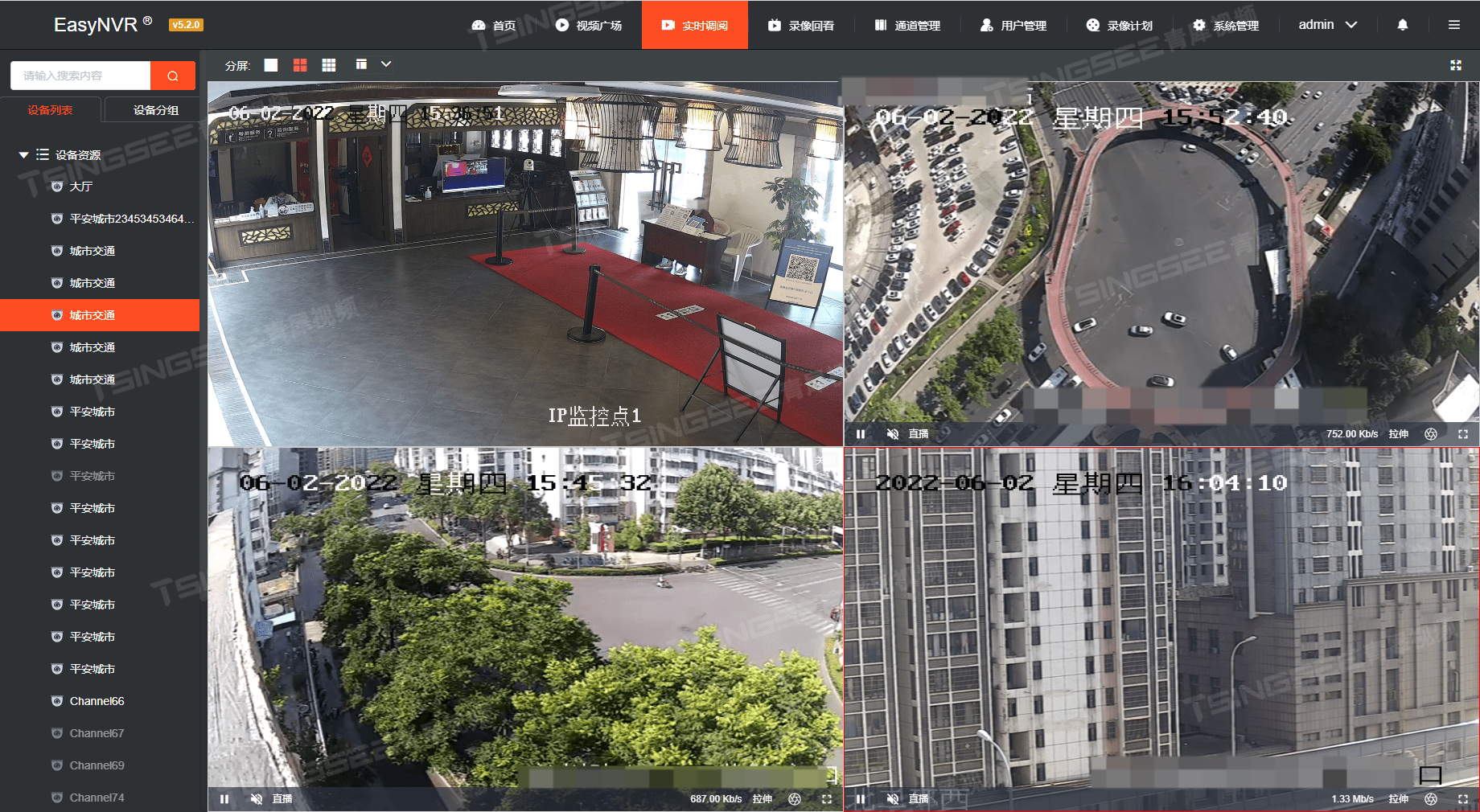
RTSP/Onvif协议视频平台EasyNVR激活码授权异常该如何解决
TSINGSEE青犀视频安防监控平台EasyNVR可支持设备通过RTSP/Onvif协议接入,并能对接入的视频流进行处理与多端分发,包括RTSP、RTMP、HTTP-FLV、WS-FLV、HLS、WebRTC等多种格式。在智慧安防等视频监控场景中,EasyNVR可提供视频实时监控直播、云端…...

React16源码: React中event事件对象的创建过程源码实现
event 对象 1 ) 概述 在生产事件对象的过程当中,要去调用每一个 possiblePlugin.extractEvents 方法现在单独看下这里面的细节过程,即如何去生产这个事件对象的过程 2 )源码 定位到 packages/events/EventPluginHub.js#L172 f…...
深度学习(12)--Mnist分类任务
一.Mnist分类任务流程详解 1.1.引入数据集 Mnist数据集是官方的数据集,比较特殊,可以直接通过%matplotlib inline自动下载,博主此处已经完成下载,从本地文件中引入数据集。 设置数据路径 from pathlib import Path# 设置数据路…...

实战解析:基于EB工具的AUTOSAR多任务配置与代码生成全流程
1. EB工具与AUTOSAR开发入门 第一次接触EB工具时,我完全被AUTOSAR标准里那些晦涩的术语搞懵了。直到在真实项目中用它完成了ECU软件开发,才发现这套工具链就像汽车电子领域的"乐高积木"——通过标准化模块让不同厂商的零部件能无缝拼接。EB tr…...

实测对比:CST仿真3.5GHz波导魔T的5种边界条件设置方案
实测对比:CST仿真3.5GHz波导魔T的5种边界条件设置方案 在射频工程领域,波导魔T作为关键的无源器件,其性能直接影响整个系统的信号质量。特别是在5G基站滤波器等应用中,3.4-4GHz频段的特性控制尤为关键。本文将深入探讨五种不同边界…...

EtherLab IGH1.6.5新版本发布:7年等待后的全面升级
1. 七年磨一剑:EtherLab IGH1.6.5的诞生背景 2017年10月发布的EtherLab IGH1.5.2版本,曾经是工业自动化领域的一个重要里程碑。这个开源EtherCAT主站解决方案,凭借其稳定性和灵活性,在机器人控制、数控机床、自动化生产线等场景中…...

深度技术解析:QKeyMapper如何实现Windows系统级按键重映射与虚拟手柄模拟
深度技术解析:QKeyMapper如何实现Windows系统级按键重映射与虚拟手柄模拟 【免费下载链接】QKeyMapper [按键映射工具] QKeyMapper,Qt开发Win10&Win11可用,不修改注册表、不需重新启动系统,可立即生效和停止。支持游戏手柄映射…...

基于File-Based App开发MVP项目级
Issue 概述 先来看看提交这个 Issue 的作者是为什么想到这个点子的,以及他初步的核心设计概念。?? 本 PR 实现了 Apache Gravitino 与 SeaTunnel 的集成,将其作为非关系型连接器的外部元数据服务。通过 Gravitino 的 REST API 自动获取表结构和元数据&…...
)
Docker桌面版隐藏功能:原来迁移WSL数据可以不用命令行(附完整操作截图)
Docker桌面版隐藏功能:图形化迁移WSL数据全攻略 每次打开Docker桌面版时,你是否注意到C盘空间正在以肉眼可见的速度减少?这个问题困扰着许多Windows平台下的开发者。传统解决方案往往要求用户通过命令行执行一系列复杂的WSL操作,但…...

玉米脱粒机设计
传统玉米脱粒依赖人工敲打或简易工具,效率低且易损伤籽粒,遇到潮湿或成熟度不均的玉米,脱粒效果更难以保证。玉米脱粒机的出现,彻底改变了这一局面。它通过旋转的脱粒滚筒与固定筛网的配合,利用机械力将玉米粒从穗轴上…...

科普大白话:布尔代数
你好呀,我是布尔代数。别一听到“代数”两个字就想逃跑——我和那个满脑子都是 xx 和 yy 的普通代数可不是同一个物种。如果说普通代数像一台精密的体重秤,总在计算“你有多少”的话,那我更像一个简单又果断的裁判,只关心一件事&a…...

战地2042 0xc000007b错误解决方法:不重装系统的修复教程
《战地风云2042》启动时弹出一个“应用程序无法正常启动(0xc000007b)”的错误窗口,这几乎是PC游戏玩家最头疼的报错之一。这个错误代码本身比较笼统,它不代表你的游戏文件坏了,也不代表你的系统彻底崩溃了,而是系统在尝试运行程序…...

【信息科学与工程学】【通信工程】【制造工程】【产品体系】第六十一篇 数据中心核心交换机全生命周期工序列表 第三十七卷
第三十七卷:国际化:全球市场拓展(第2351-2400章)章号范围章标题章节示例该章预估工序数关键时序节点2351-2360全球准入与认证攻坚2353.2.5 CE-EMC指令符合性测试(EN 55032/35)800T-180天 ~ T-90天2361-2370多区域电气与安全…...