蓝桥杯嵌入式第六届真题(完成)STM32G431
蓝桥杯嵌入式第六届真题(完成)STM32G431
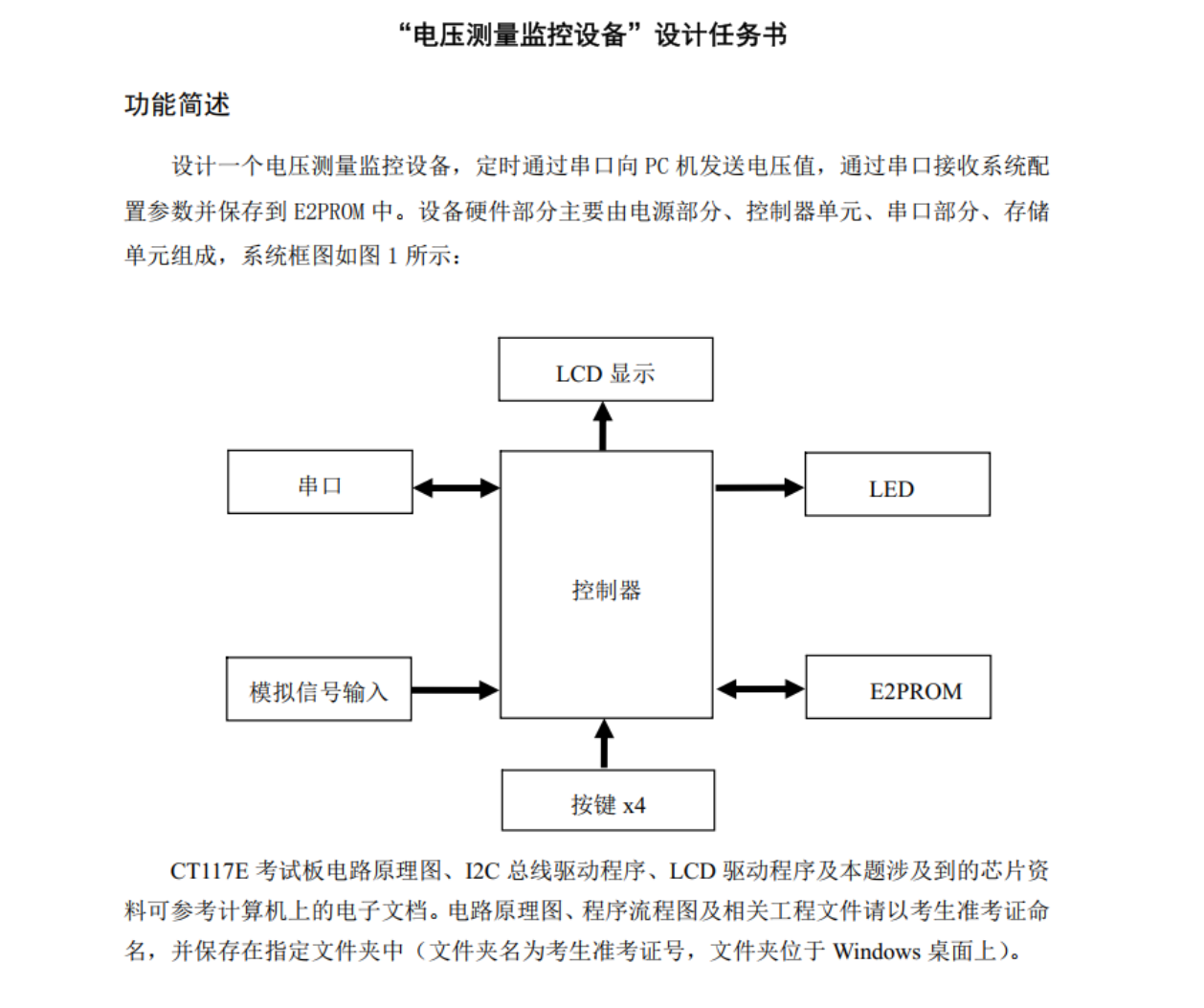
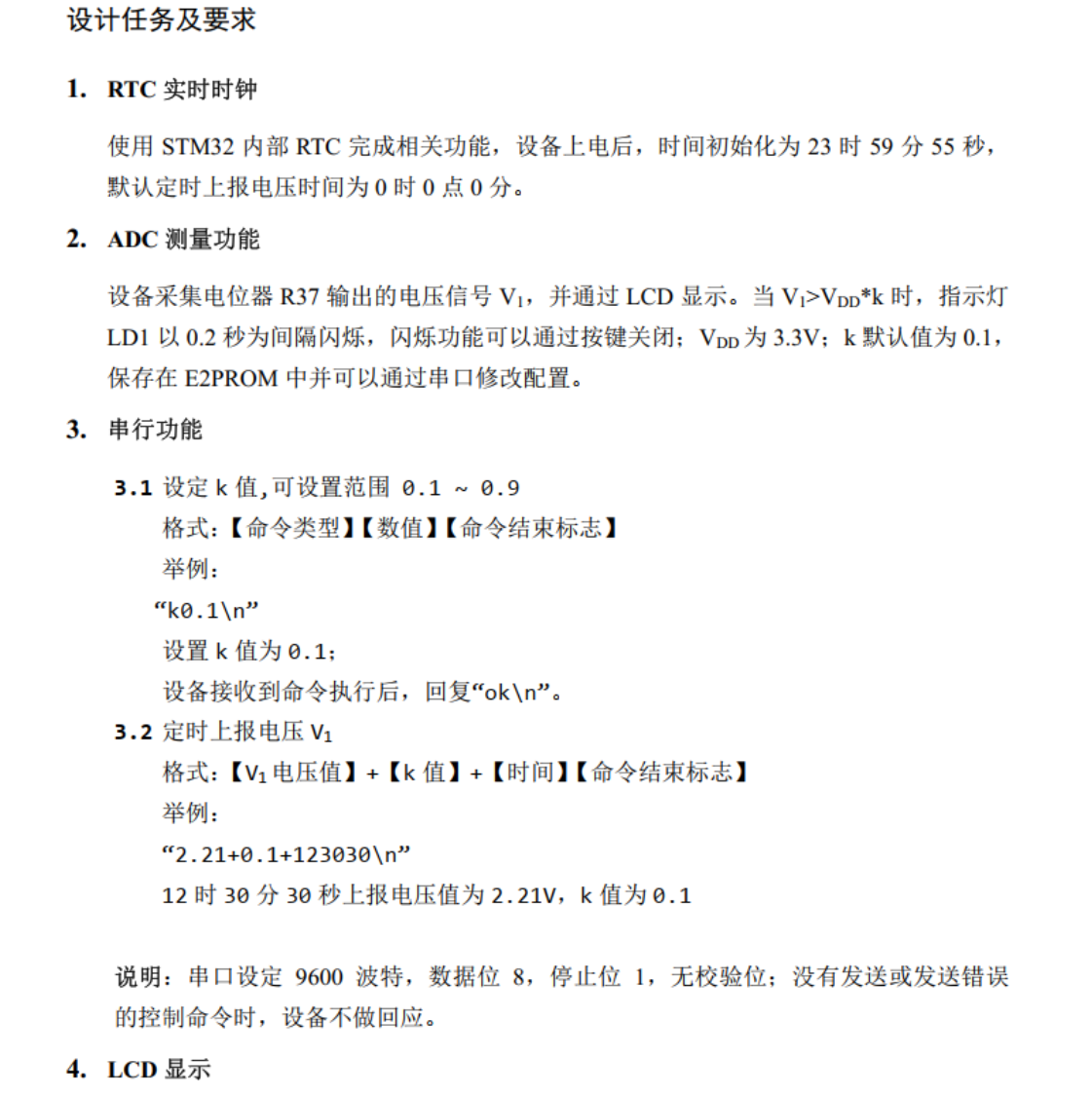
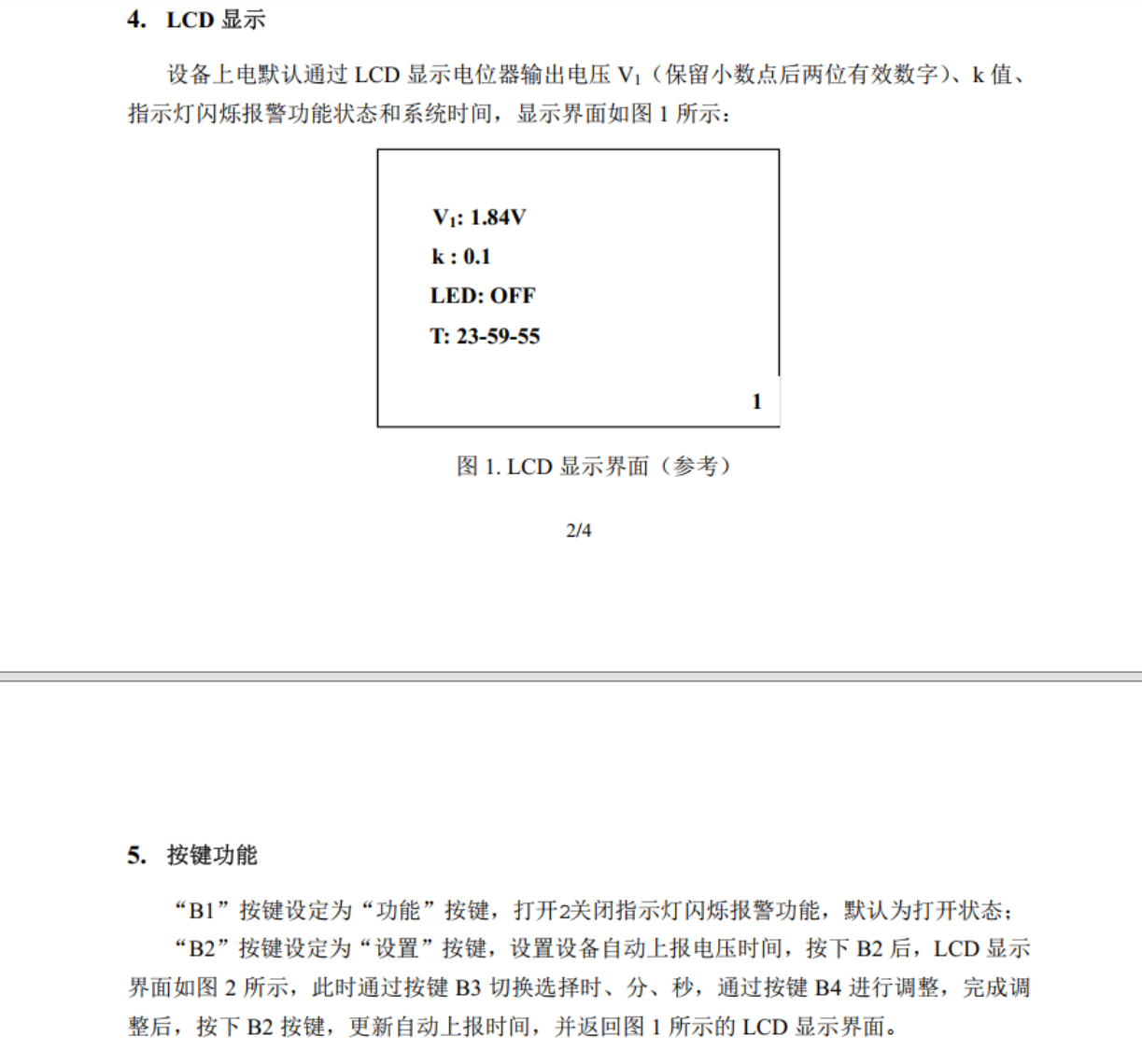
题目部分
相关文件
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "rtc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "i2c_hal.h"
#include "key.h"
#include "myadc.h"
#include "led.h"
#include "string.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
uint8_t lcdtext[30];
extern struct Key key[4];
uint8_t view = 0;//鍒濆lcd鏄剧ず
RTC_TimeTypeDef Time;
RTC_DateTypeDef Date;
uint8_t h=0,m=0,s=0;
float val;
float k = 0.1;
uint8_t ledflag = 1;
uint8_t ledtimes;
extern unsigned char Recive_Data[5];
extern unsigned char Temp_Data[1];
extern bool rxflag;
extern unsigned char rx_pointer;
uint32_t counter = 0;
bool ledState = false;
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_process(void);
void lcd_process(void);
void led_process(void);
void rx_process(void);
void tx_process(void);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_ADC2_Init();MX_RTC_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_TIM_Base_Start_IT(&htim2);HAL_UART_Receive_IT(&huart1, Temp_Data, 1);LCD_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);//EEPROM_Write_Float(0,0.9);//HAL_Delay(5);while (1){lcd_process();//EEPROM_Write(0,20);// HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN);// HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN);// sprintf((char *)lcdtext,"%.2f",get_adc(&hadc2));// LCD_DisplayStringLine(Line2,lcdtext);// sprintf((char *)lcdtext,"%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds);// LCD_DisplayStringLine(Line4,lcdtext);key_process();led_process();rx_process();tx_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.LSIState = RCC_LSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_RTC|RCC_PERIPHCLK_USART1|RCC_PERIPHCLK_ADC12;PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;PeriphClkInit.RTCClockSelection = RCC_RTCCLKSOURCE_LSI;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void key_process(void)
{if(key[0].key_flag==1&&view==0){LCD_Clear(Black);key[0].key_flag=0;view = 1;ledflag = 0;}else if(key[0].key_flag==1&&view==1){LCD_Clear(Black);key[0].key_flag=0;view = 0;ledflag = 1;}if(key[1].key_flag==1&&(view==0||view==1)){LCD_Clear(Black);key[1].key_flag=0;view = 2;}if(key[1].key_flag==1&&(view==3||view==4||view==5)){LCD_Clear(Black);key[1].key_flag=0;view = 0;}if(key[2].key_flag==1&&(view==2||view==3||view==4||view==5)){LCD_Clear(Black);key[2].key_flag=0;view++;if(view>5){view = 3;}}if(key[3].key_flag==1&&view==3){LCD_Clear(Black);key[3].key_flag=0;h++;if(h>24){h=0;}}else if (key[3].key_flag==1&&view==4){LCD_Clear(Black);key[3].key_flag=0;m++;if(m>60){m=0;}}else if (key[3].key_flag==1&&view==5){LCD_Clear(Black);key[3].key_flag=0;s++;if(s>60){s=0;}}}void lcd_process(void)
{switch (view){case 0: //LED鎵撳紑鐣岄潰{val = get_adc(&hadc2);sprintf((char *)lcdtext," V1:%.2f ",val);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," K:%.1f ",EEPROM_Read_Float(0));LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," LED:ON ");LCD_DisplayStringLine(Line5,lcdtext);HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN);HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN);sprintf((char *)lcdtext," T:%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds);LCD_DisplayStringLine(Line7,lcdtext);}break;case 1://LED鍏抽棴鐣岄潰{val = get_adc(&hadc2);sprintf((char *)lcdtext," V1:%.2f ",val);LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," K:%.1f ",EEPROM_Read_Float(0));LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," LED:OFF ");LCD_DisplayStringLine(Line5,lcdtext);HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN);HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN);sprintf((char *)lcdtext," T:%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds);LCD_DisplayStringLine(Line7,lcdtext);}break;case 2://璁剧疆鐣岄潰{sprintf((char *)lcdtext," Setting ");LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s);LCD_DisplayStringLine(Line5,lcdtext);}break;case 3://璁剧疆灏忔椂鐣岄潰{sprintf((char *)lcdtext," Setting ");LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," --");LCD_DisplayStringLine(Line6,lcdtext);}break;case 4://璁剧疆鍒嗛挓鐣岄潰{sprintf((char *)lcdtext," Setting ");LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," --");LCD_DisplayStringLine(Line6,lcdtext);}break;case 5://璁剧疆绉掔晫闈?{sprintf((char *)lcdtext," Setting ");LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," --");LCD_DisplayStringLine(Line6,lcdtext);}break;default:break;}}void led_process(void)
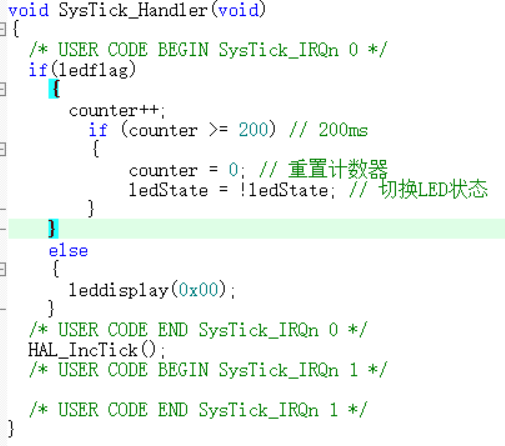
{if (ledflag && val > 3.3f * k){if (ledState){leddisplay(0x02);}else{leddisplay(0x00);}}
}void rx_process(void)
{if(rxflag){if(Recive_Data[3] == '1'){k = 0.1;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '2'){k = 0.2;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '3'){k = 0.3;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '4'){k = 0.4;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '5'){k = 0.5;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '6'){k = 0.6;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '7'){k = 0.7;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '8'){k = 0.8;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}else if(Recive_Data[3] == '9'){k = 0.9;char My_sentdata[30];sprintf(My_sentdata,"ok\n");HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50);}EEPROM_Write_Float(0,k);rx_pointer=0;rxflag=false; memset(Recive_Data,0,5);}}void tx_process(void)
{static bool already_sent = false;if(Time.Hours == h && Time.Minutes == m && Time.Seconds == s){if (!already_sent) // 检查是否已经发送过数据{char My_sentdata[30];sprintf(My_sentdata,"%.2f+%.1f+%02d%02d%02d\n", val, k, h, m, s);HAL_UART_Transmit(&huart1, (uint8_t*)My_sentdata, strlen(My_sentdata), 50);already_sent = true; // 标记已发送}}else{already_sent = false; // 当时间改变时重置标志}
}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/void key_process(void);
处理按键任务,用户多个界面之间的转换以及上报时间的设置,根据当前lcd的状态,来决定按键按下的功能
void lcd_process(void);
显示各种状态,使用状态机,显示不同状态,使用sprinf函数格式化重定向字符串
void led_process(void);
控制led闪烁,使用一个计数值,在抵达定时器中++实现200ms计数
void rx_process(void);
控制串口发送的数据,不知为何HAL_UART_Receive_IT(huart, Temp_Data, 1);中如果不是1,就会只能进入一次串口接收回调函数,所以使用每次接收一个然后设置一个缓冲区,控制指针来一次接收5个数据,只有接受完五个数据即进入5次串口接收回调函数后才执行解析函数,注意最后全波清0
void tx_process(void);
控制上报的数据,当rtc时钟的时间到达设置时间发送数据
led.c
#include "led.h"void leddisplay(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}该板子是低电平点亮,8个led灯使用的是高8位所以需要左移8位,led等于几就是将高8位中第几位设置成低电平即点亮,由于led与lcd复用引脚最后打开锁存器让值被写入之后,立刻关闭锁存器防止影响lcd
myadc.c
#include "myadc.h"float get_adc(ADC_HandleTypeDef *hadc)
{float val;// 等待ADC转换完成HAL_ADC_Start(hadc);val = HAL_ADC_GetValue(hadc);return val*3.3f/4096;
}usart1.c
#include "usart1.h"
#include "string.h"
#include "usart.h"
#include "stdbool.h"
extern float k;
unsigned char Recive_Data[5];
unsigned char Temp_Data[1];
unsigned char rx_pointer = 0;
bool rxflag = false;
char usartsend[30];
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance==USART1){Recive_Data[rx_pointer++] = Temp_Data[0];HAL_UART_Receive_IT(huart, Temp_Data, 1);if(Recive_Data[4]!=0){rxflag = true;}}
}接收完四个之后置一个标志位,rx_process才能执行,每次都需调用HAL_UART_Receive_IT函数重新开启串口接收
key.c
#include "key.h"
#include "led.h"
struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0; i<4;i++){switch (key[i].key_index){case 0:/* constant-expression */{if(key[i].key_gpio==0){key[i].key_index = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_index = 2;key[i].key_flag=1;}else{key[i].key_index = 0;}}case 2:{if(key[i].key_gpio==1){key[i].key_index=0;}}break;}}}
}使用状态机,第一次进入之后,进入下一个状态,如果电平还是刚刚的电平说明真的按下,如果不是重新进入第一个状态重新判断,定时器定时时间10ms刚好消抖,最后一个case2是判断如果按键松开,说明可以进入下一次判断。
i2c_hal.c
/*程序说明: CT117E-M4嵌入式竞赛板GPIO模拟I2C总线驱动程序软件环境: MDK-ARM HAL库硬件环境: CT117E-M4嵌入式竞赛板日 期: 2020-3-1
*/#include "i2c_hal.h"
#include "main.h"
#define DELAY_TIME 20/*** @brief SDA线输入模式配置* @param None* @retval None*/
void SDA_Input_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_INPUT;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出模式配置* @param None* @retval None*/
void SDA_Output_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStructure.Pull = GPIO_NOPULL;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出一个位* @param val 输出的数据* @retval None*/
void SDA_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_7;}else{GPIOB->BRR |= GPIO_PIN_7;}
}/*** @brief SCL线输出一个位* @param val 输出的数据* @retval None*/
void SCL_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_6;}else{GPIOB->BRR |= GPIO_PIN_6;}
}/*** @brief SDA输入一位* @param None* @retval GPIO读入一位*/
uint8_t SDA_Input(void)
{if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET){return 1;}else{return 0;}
}/*** @brief I2C的短暂延时* @param None* @retval None*/
static void delay1(unsigned int n)
{uint32_t i;for ( i = 0; i < n; ++i);
}/*** @brief I2C起始信号* @param None* @retval None*/
void I2CStart(void)
{SDA_Output(1);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C结束信号* @param None* @retval None*/
void I2CStop(void)
{SCL_Output(0);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(1);delay1(DELAY_TIME);}/*** @brief I2C等待确认信号* @param None* @retval None*/
unsigned char I2CWaitAck(void)
{unsigned short cErrTime = 5;SDA_Input_Mode();delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);while(SDA_Input()){cErrTime--;delay1(DELAY_TIME);if (0 == cErrTime){SDA_Output_Mode();I2CStop();return ERROR;}}SDA_Output_Mode();SCL_Output(0);delay1(DELAY_TIME);return SUCCESS;
}/*** @brief I2C发送确认信号* @param None* @retval None*/
void I2CSendAck(void)
{SDA_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送非确认信号* @param None* @retval None*/
void I2CSendNotAck(void)
{SDA_Output(1);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送一个字节* @param cSendByte 需要发送的字节* @retval None*/
void I2CSendByte(unsigned char cSendByte)
{unsigned char i = 8;while (i--){SCL_Output(0);delay1(DELAY_TIME);SDA_Output(cSendByte & 0x80);delay1(DELAY_TIME);cSendByte += cSendByte;delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);}SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C接收一个字节* @param None* @retval 接收到的字节*/
unsigned char I2CReceiveByte(void)
{unsigned char i = 8;unsigned char cR_Byte = 0;SDA_Input_Mode();while (i--){cR_Byte += cR_Byte;SCL_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);cR_Byte |= SDA_Input();}SCL_Output(0);delay1(DELAY_TIME);SDA_Output_Mode();return cR_Byte;
}//
void I2CInit(void)
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7 | GPIO_PIN_6;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}void EEPROM_Write(uint8_t address,uint8_t Data)
{I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(address);I2CWaitAck();I2CSendByte(Data);I2CWaitAck();I2CStop();
}uint8_t EEPROM_Read(uint8_t address)
{uint8_t data;I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(address);I2CWaitAck();I2CStop();I2CStart();I2CSendByte(0xA1);I2CWaitAck();data = I2CReceiveByte();I2CWaitAck();I2CStop();return data;}void EEPROM_Write_Float(uint8_t address, float data)
{union FloatUnion fu;fu.floatval = data;for(int i = 0; i < sizeof(float); i++){EEPROM_Write(address + i, fu.bytes[i]);HAL_Delay(5); }
}float EEPROM_Read_Float(uint8_t address)
{union FloatUnion fu;for(int i = 0; i < sizeof(float); i++){fu.bytes[i] = EEPROM_Read(address + i);}return fu.floatval;
}只有最后四个函数是本人写的,其余为蓝桥杯官方提供,主要是两种i2c时序,指定地址写和指定地址读的时序,重点在读需要首先写入要读取的地址之后再开始读,浮点数的存储使用联合体union
floatval和bytes数组共用内存
可以看本人文章stm32教程中有对i2c四种时序的说明
相关文章:
蓝桥杯嵌入式第六届真题(完成)STM32G431
蓝桥杯嵌入式第六届真题(完成)STM32G431 题目部分 相关文件 main.c /* USER CODE BEGIN Header */ /********************************************************************************* file : main.c* brief : Main program b…...

【日志记录】——主MCU 通过私有协议更新从MCU程序固件
一:需求分析 在一些系统较为复杂的嵌入式设备中,往往不止一片MCU或者处理模块,通常为一片主MCU负责应用逻辑处理和对外网络通信,其他从MCU负责实时采集处理高频数据,在设备运营过程中,往往伴随新需求或者bu…...
)
【0253】深入分析Query Execution(一)
下一篇:【0254】深入分析Query Execution(二) 1. 查询执行阶段(Query Execution Stages) 1.1 简单查询协议(Simple Query Protocol) 客户端-服务器协议的一个简单版本支持SQL查询执行:它将查询的文本发送到服务器,并在响应中获得完整的执行结果,而不管它包含多少行…...
编译opencv4.6问题汇总,第三方软件包见我发的资源
win10系统 python3.8.2,cmake-3.15.5-win64-x64,opencv4.6 编译方式见:OpenCV的编译 - 知乎 本文主要总结问题。赠人玫瑰手留余香。 问题1 Problem with installing OpenCV using Visual Studio and CMake (error code: MSB3073) 解决方法…...
Matplotlib炫酷气泡图:代码实战与参数解析【第55篇—python:Matplotlib炫酷气泡图】
文章目录 Matplotlib炫酷气泡图:代码实战与参数解析1. 基础气泡图2. 网格气泡图3. 自定义颜色气泡图4. 钟型气泡图5. 交互式气泡图6. 打卡气泡图7. 动态气泡图总结 Matplotlib炫酷气泡图:代码实战与参数解析 气泡图是一种展示数据分布、关联和趋势的强大…...
Android学习之路(29) Gradle初探
前言: 大家回想一下自己第一次接触Gradle是什么时候? 相信大家也都是和我一样,在我们打开第一个AS项目的时候, 发现有很多带gradle字样的文件:setting.gradle, build.gradle,gradle.warpper,以及在gradle文件中各种配置ÿ…...
python-自动化篇-运维-语音识别
文章目录 理论文本转换为语音使用 pyttsx使用 SAPI使用 SpeechLib 语音转换为文本 代码和效果01使用pyttsx实现文本_语音02使用SAPI实现文本_语音03使用SpeechLib实现文本_语音04使用PocketSphinx实现语音转换文本 理论 语音识别技术,也被称为自动语音识别…...
ElasticSearch-ElasticSearch实战-仿京东商城搜索(高亮)
注:此为笔者学习狂神说ElasticSearch的实战笔记,其中包含个人的笔记和理解,仅做学习笔记之用,更多详细资讯请出门左拐B站:狂神说!!! 七、ElasticSearch实战 仿京东商城搜索(高亮) 1、工程创建…...
是什么?如何在 Python 中实现一个简单的 ORM(对象关系映射)?)
解释 Python 中的描述符(Descriptor)是什么?如何在 Python 中实现一个简单的 ORM(对象关系映射)?
解释 Python 中的描述符(Descriptor)是什么?举例说明其用法。 在 Python 中,描述符(Descriptor)是一种对象属性的扩展机制,它允许你在访问或修改属性时执行自定义的操作。描述符是实现了特定协…...
IP数据云识别真实IP与虚假流量案例
随着互联网的普及,企业在数字领域面临着越来越复杂的网络威胁。为了保护网站免受虚假流量和恶意攻击的影响,许多企业正在采用IP数据云。本文将结合一个真实案例,深入探讨IP数据云如何成功准确地识别真实用户IP和虚假流量IP,提高网…...

signalR+websocket:实现消息实时通讯——技能提升
signalR 解决步骤1:npm install microsoft/signalr6.0.6 安装指定版本的microsoft/signalr,我这边安装的版本是6.0.6 解决步骤2:引入import * as signalR from microsoft/signalr; import * as signalR from microsoft/signalr; 下面第三…...
机器学习入门-----sklearn
机器学习基础了解 概念 机器学习是人工智能的一个实现途径 深度学习是机器学习的一个方法发展而来 定义:从数据中自动分析获得模型,并利用模型对特征数据【数据集:特征值+目标值构成】进行预测 算法 数据集的目标值是类别的话叫做分类问题;目标值是连续的数值的话叫做回…...
双非本科准备秋招(15.3)—— 力扣二叉树
今天学了二叉树结点表示法,建树代码如下。 public class TreeNode {public int val;public TreeNode left;public TreeNode right;public TreeNode(int val) {this.val val;}public TreeNode(int val, TreeNode left, TreeNode right) {this.val val;this.left …...
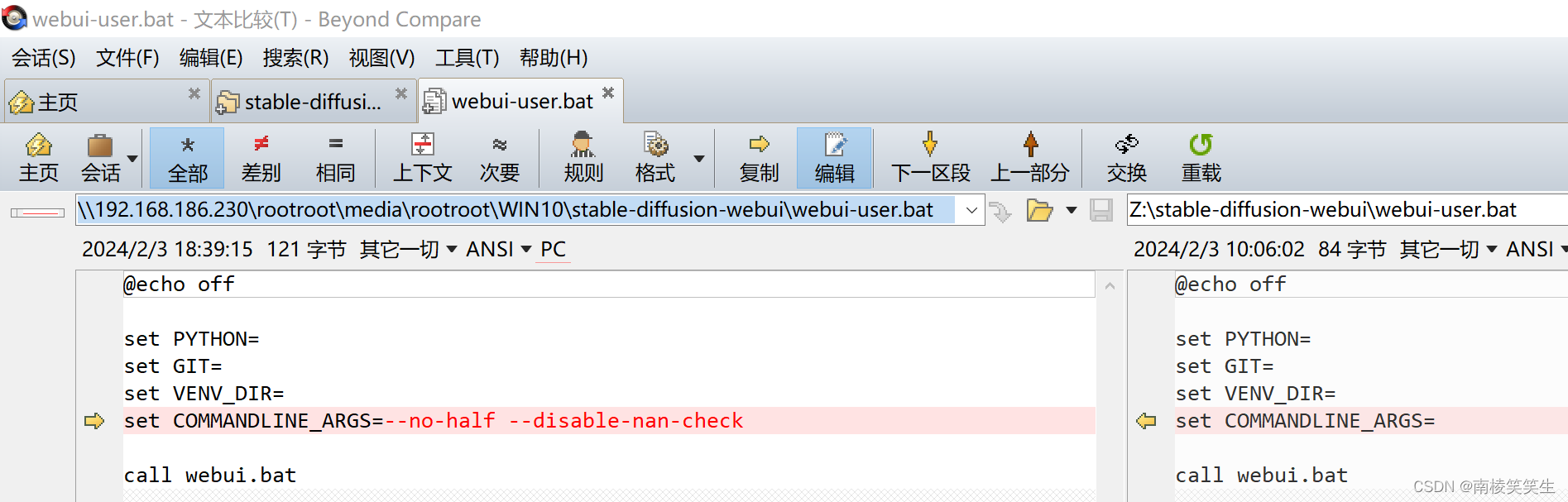
20240203在WIN10下使用GTX1080配置stable-diffusion-webui.git不支持float16精度出错的处理
20240203在WIN10下使用GTX1080配置stable-diffusion-webui.git不支持float16精度出错的处理 2024/2/3 21:23 缘起:最近学习stable-diffusion-webui.git,在Ubuntu20.04.6下配置SD成功。 不搞精简版本:Miniconda了。直接上Anacoda! …...

京东微前端框架MicroApp简介
一、MicroApp 1.1 MicroApp简介 MicroApp是由京东前端团队推出的一款微前端框架,它从组件化的思维,基于类WebComponent进行微前端的渲染,旨在降低上手难度、提升工作效率。MicroApp无关技术栈,也不和业务绑定,可以用于任何前端框架。 官网链接:https://micro-zoe.gith…...
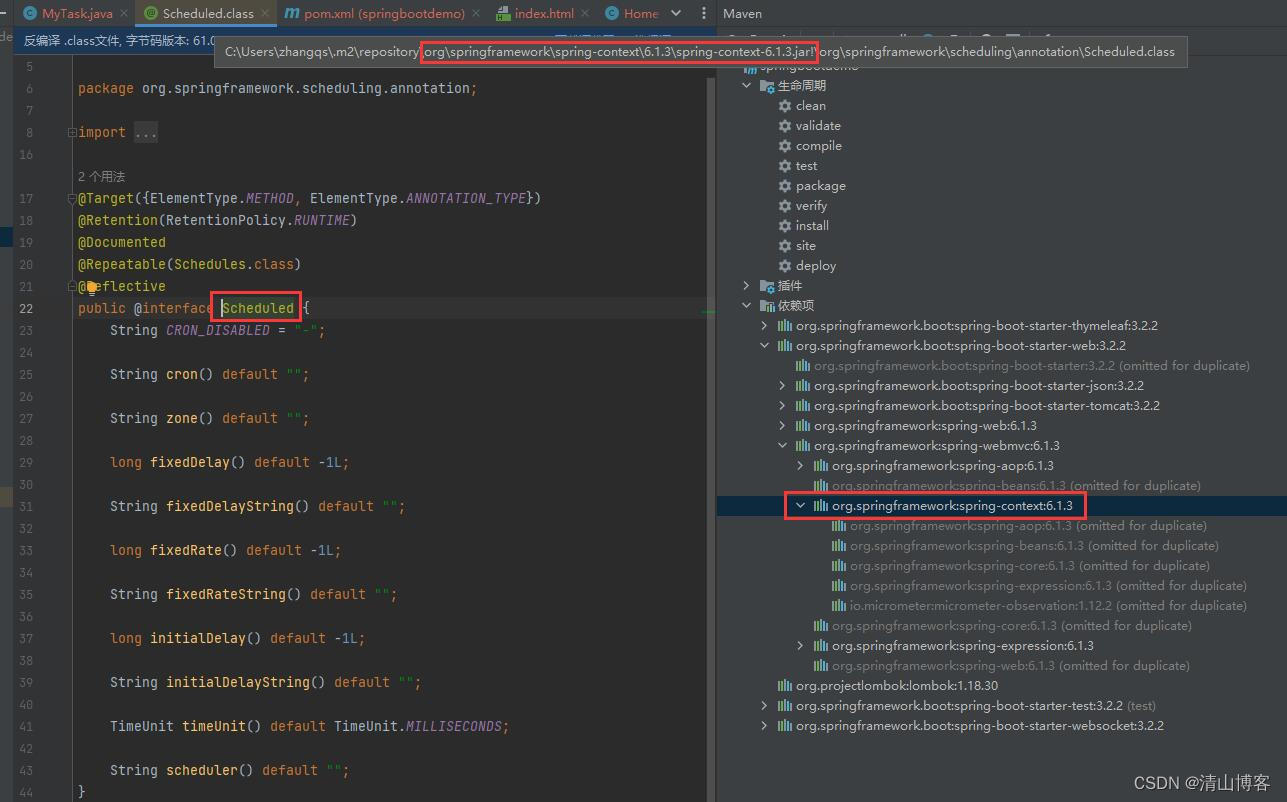
SpringBoot 使用定时任务(SpringTask)
Spring3.0以后自带的task,可以将它看成一个轻量级的Quartz,而且使用起来比Quartz简单许多。 使用步骤: 1.导入坐标 在spring-boot-starter-web坐标中,就包含了SpringTask,所以一般的Web项目都包含了。 <depende…...
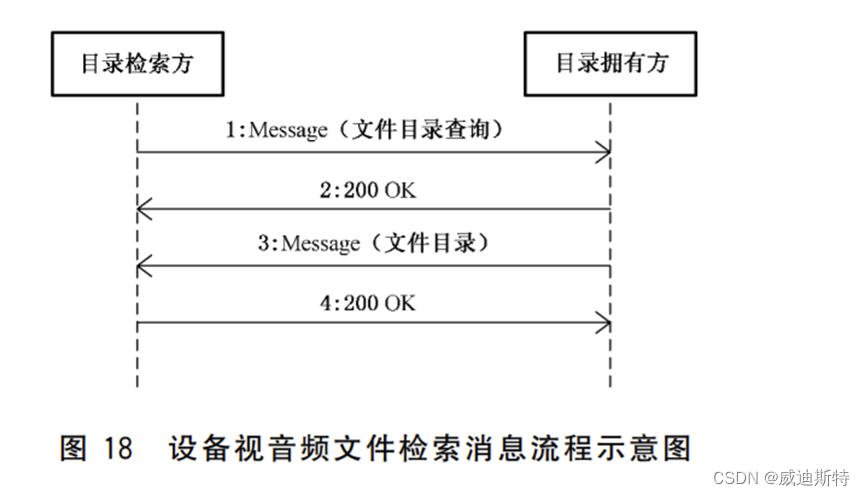
国标GB/T 28181详解:设备视音频文件检索消息流程
目 录 一、设备视音频文件检索 二、设备视音频文件检索的基本要求 三、命令流程 1、流程图 2、流程描述 四、协议接口 五、产品说明 六、设备视音频文件检索的作用 七、参考 在国标GBT28181中,定义了设备视音频文件检索消息的流程,主…...

openssl自签名CA根证书、服务端和客户端证书生成并模拟单向/双向证书验证
1. 生成根证书 1.1 生成CA证书私钥 openssl genrsa -aes256 -out ca.key 2048 1.2 取消密钥的密码保护 openssl rsa -in ca.key -out ca.key 1.3 生成根证书签发申请文件(csr文件) openssl req -new -sha256 -key ca.key -out ca.csr -subj "/CCN/STFJ/LXM/ONONE/OU…...

NIO Selector简介
1.Selector和Channel关系 Selector一般称为选择器,也叫多路复用器,NIO的核心组件,用于检查一个或多个Channel的状态是否处于可读、可写的状态。 2.可选择通道 (1)不是所有的channel都能被selector复用,…...
2023-12蓝桥杯STEMA考试 C++ 中高级试卷解析
蓝桥杯STEMA考试 C++ 中高级试卷(12月) 一、选择题 第一题 定义字符串 string a = "Hello C++",下列选项可以获取到字符 C 的是(B)。 A、a[7] B、a[6] C、a[5] D、a[4] 第二题 下列选项中数值与其它项不同的是( C)。 A、 B、 C、 D、 第三题 定义变量 int i =…...

Cursor AI破解免费VIP 2025终极完整教程:如何绕过试用限制享受Pro功能
Cursor AI破解免费VIP 2025终极完整教程:如何绕过试用限制享受Pro功能 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve r…...

0331作业
...

Android OkHtttp 流程分析
文章目录概述核心类执行流程请求发起拦截器链连接池异步任务调度器概述 OkHttp 是一个由 Square 公司开发的高效、简洁的 HTTP 客户端库。 OkHttp 包含一个连接池,可以复用 TCP 连接,避免了多次握手的开销。自动处理 GZip、HTTP 缓存、响应重试。 核心…...

实战派必备:基于快马平台打造全能型ventoy系统救援启动盘
实战派必备:基于快马平台打造全能型ventoy系统救援启动盘 最近在折腾系统维护工具时,发现ventoy真是个神器。它不仅能同时装多个系统镜像到一个U盘,还能自定义菜单和工具包。不过网上的ventoy教程大多只教基础用法,真正适合实战的…...

League Director:开源英雄联盟录像编辑工具,释放你的游戏视频创作潜能
League Director:开源英雄联盟录像编辑工具,释放你的游戏视频创作潜能 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/l…...

Godot解包工具完整指南:3分钟提取游戏资源
Godot解包工具完整指南:3分钟提取游戏资源 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker godot-unpacker 是一个专为Godot游戏引擎设计的资源解包工具,能够快速提取非加密的…...

09-开关电源滤波设计
1.开关电源滤波设计-差模干扰 (1)LISN电源 传导干扰(CE)测试的仪器,CE测试的频率范围为:150kHz到30MHz,其本质是噪声电流,将噪声电流转换为噪声电压来测量。 1uF和50uH,…...

一次性拖鞋自动下料系统设计超声波热熔裁剪机设计【论文+CAD图纸+solidworks三维+开题报告+任务书+实习调研报告+其它相关资料】
一次性拖鞋自动下料系统与超声波热熔裁剪机的设计,聚焦于提升拖鞋制造环节的效率与精度。传统拖鞋生产中,人工下料易受操作误差影响,导致材料浪费与产品尺寸偏差;而普通裁剪方式可能因热熔不充分,出现边缘毛刺或连接不…...

VRM Addon for Blender全流程指南:从安装到高级角色创作
VRM Addon for Blender全流程指南:从安装到高级角色创作 【免费下载链接】VRM-Addon-for-Blender VRM Importer, Exporter and Utilities for Blender 2.93 to 5.0 项目地址: https://gitcode.com/gh_mirrors/vr/VRM-Addon-for-Blender VRM Addon for Blende…...

揭秘OZON热销榜:这些国货好口碑品牌,凭什么让老外也抢购?
近年来,俄罗斯电商平台OZON已成为中国卖家出海的新蓝海。一个有趣的现象是,许多在国内司空见惯的国货品牌,竟在OZON上掀起抢购热潮,成为俄罗斯消费者眼中的“香饽饽”。它们究竟凭什么征服了万里之外的消费者?今天&…...