相机图像质量研究(3)图像质量测试介绍
系列文章目录
相机图像质量研究(1)Camera成像流程介绍
相机图像质量研究(2)ISP专用平台调优介绍
相机图像质量研究(3)图像质量测试介绍
相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距
相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深
相机图像质量研究(6)常见问题总结:光学结构对成像的影响--对焦距离
相机图像质量研究(7)常见问题总结:光学结构对成像的影响--镜片固化
相机图像质量研究(8)常见问题总结:光学结构对成像的影响--工厂调焦
相机图像质量研究(9)常见问题总结:光学结构对成像的影响--工厂镜头组装
I相机图像质量研究(10)常见问题总结:光学结构对成像的影响--光圈
相机图像质量研究(11)常见问题总结:光学结构对成像的影响--像差
相机图像质量研究(12)常见问题总结:光学结构对成像的影响--炫光
相机图像质量研究(13)常见问题总结:光学结构对成像的影响--鬼影
相机图像质量研究(14)常见问题总结:光学结构对成像的影响--伪像
相机图像质量研究(15)常见问题总结:光学结构对成像的影响--暗角
相机图像质量研究(16)常见问题总结:光学结构对成像的影响--IRCUT
相机图像质量研究(17)常见问题总结:CMOS期间对成像的影响--靶面尺寸
相机图像质量研究(18)常见问题总结:CMOS期间对成像的影响--CFA
相机图像质量研究(19)常见问题总结:CMOS期间对成像的影响--Sensor Noise
相机图像质量研究(20)常见问题总结:CMOS期间对成像的影响--全局快门/卷帘快门
相机图像质量研究(21)常见问题总结:CMOS期间对成像的影响--隔行扫描/逐行扫描
相机图像质量研究(22)常见问题总结:CMOS期间对成像的影响--光学串扰
相机图像质量研究(23)常见问题总结:CMOS期间对成像的影响--紫晕
相机图像质量研究(24)常见问题总结:CMOS期间对成像的影响--摩尔纹
相机图像质量研究(25)常见问题总结:CMOS期间对成像的影响--过曝、欠曝
相机图像质量研究(26)常见问题总结:CMOS期间对成像的影响--坏点
相机图像质量研究(27)常见问题总结:补光灯以及遮光罩对成像的影响--遮光罩
相机图像质量研究(28)常见问题总结:补光灯以及遮光罩对成像的影响--补光灯
相机图像质量研究(29)常见问题总结:图像处理对成像的影响--图像插值Demosaic
相机图像质量研究(30)常见问题总结:图像处理对成像的影响--重影
相机图像质量研究(31)常见问题总结:图像处理对成像的影响--图像差
相机图像质量研究(32)常见问题总结:图像处理对成像的影响--振铃效应
相机图像质量研究(33)常见问题总结:图像处理对成像的影响--锯齿
相机图像质量研究(34)常见问题总结:图像处理对成像的影响--拖影
相机图像质量研究(35)常见问题总结:图像处理对成像的影响--运动噪声
相机图像质量研究(36)常见问题总结:编解码对成像的影响--块效应
相机图像质量研究(37)常见问题总结:编解码对成像的影响--条带效应
相机图像质量研究(38)常见问题总结:编解码对成像的影响--呼吸效应
相机图像质量研究(39)常见问题总结:编解码对成像的影响--运动模糊
相机图像质量研究(40)常见问题总结:显示器对成像的影响--画面泛白
目录
目录
系列文章目录
前言
一、图像质量客观评价参数
二、图像质量主观评价维
前言
Camera图像质量需要通过一定的方法衡量,为了保证图像质量满足规格,一般有客观参数和主观评价两个方面进行衡量。
一、图像质量客观评价参数
客观图像质量评估方法主要通过仪器仪表测量出具体的数据,然后与标准进行对比,从而判断图像质量的好坏,目前主流的图像质量客观参数包含:解析度,色彩还原,白平衡,饱和度,灰阶,色度,信噪比,畸变,色散,最低照度。
下面是工作中总结的可以用客观参数衡量的维度。
| 类别 | 项目 | 子项目 | 设备形态 | 标准制定厂家 | 评测标准 | 测试图卡/图片 |
| ISP | 客观 | 1、解析度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要对好焦再测试,对焦距离为iso12233图卡占满图像的距离。 | 电信 | 测试要求: 使用D65光源,照度均匀,数值600±200lux 测试标准 建议值:1、选用 MTF50 的数值为参考标准: 200万像素 中心≥900LW/PH 边角≥600LW/PH 300万像素 中心≥1100LW/PH 边角≥800LW/PH 400万像素 中心≥1200LW/PH 边角≥900LW/PH |  |
| 移动 | 要求:6500K光源色温 判据:摄像机输出图像的中心水平分辨力不低于标称值,边缘水平分辨力不应低于中心水平分辨力的70% (线数以窄边像素*0.9为准)。 |
| ||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 测试标准 建议值:1、选用 MTF50 的数值为参考标准: 环境1: 全彩 H265+H264 1000lux±100lux, 300万像素 中心≥1100LW/PH 边角≥800LW/PH 400万像素 中心≥1200LW/PH 边角≥900LW/PH 环境2: 全彩 H265 600lux±100lux 300万像素 中心≥1100LW/PH 边角≥800LW/PH 400万像素 中心≥1200LW/PH 边角≥900LW/PH 环境3: 全彩 H26550lux±10lux 300万像素 中心≥1000LW/PH 边角≥700LW/PH 400万像素 中心≥1100LW/PH 边角≥800LW/PH 环境4:全彩+黑白 H265 1lux±0.2lux 300万像素 中心≥800LW/PH 边角≥560LW/PH 400万像素 中心≥900LW/PH 边角≥700LW/PH |
| ||||
| 2、色彩还原度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要保证灯箱内壁是标准N5中性灰 3、灯箱色温误差小于200K | 电信 | 测试要求: 使用D65光源,照度均匀,数值600±200lux 保证色卡占整张画面的1/3~1/2比例; 测试标准 ΔC数值越小,色彩还原度越高。 建议值:ΔCmean<6 ΔEmean<12 |  | ||
| 移动 | 要求:按照GA/T1127中的方法进行检验。 判据:对彩色图卡中每个色块的色彩还原误差平均值不超过15(6500K光源),白灰黑色块最大值不超过35(6500K光源), CIE L*a*b* 色彩误差单位。 |
| ||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 保证色卡占整张画面的1/3~1/2比例; 测试标准 ΔC数值越小,色彩还原度越高。 环境1:全彩 600±100lux Imatest:ΔCmean<6 ΔEmean<12 IQAnalyzer:ΔEmean<15 ΔEmax<35 环境2:全彩 50±10lux Imatest:ΔCmean<10 ΔEmean<15 环境3:全彩 1±0.2lux Imatest:ΔCmean<15 ΔEmean<20 |
| ||||
| 3、白平衡 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要保证灯箱内壁是标准N5中性灰 3、灯箱色温误差小于200K | 电信 | 测试要求: 使用D65光源,照度均匀,数值600±200lux 色卡占整张画面的1/3~1/2比例; 测试标准: ΔC数值越小,白平衡效果越好 参考值:ΔCmean<4 S<0.10 |
| ||
| 自定义 | 测试要求: 色卡占整张画面的1/3~1/2比例; 测试标准: ΔC数值越小,白平衡效果越好 环境1:全彩 600±100lux,使用D65、D50,TL84光源,照度均匀, D65:ΔCmean<4,S<0.10 D50,TL84:ΔCmean<6,S<0.10 环境2:全彩 50±10lux,使用D65、D50,TL84光源,照度均匀, D65:ΔCmean<4,S<0.10 D50,TL84:ΔCmean<6.4,S<0.10 环境3:全彩 1±0.2lux,使用D65光源,照度均匀, ΔCmean<6,S<0.15 |
| ||||
| 4、灰阶 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | 测试要求:使用D65光源,照度均匀,数值600±200lux。 测试标准 白皮书要求:阶数>14 建议值:阶数>16 | 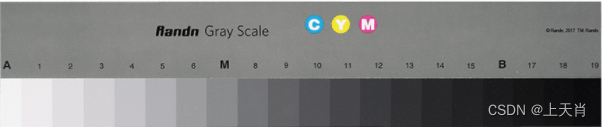 | ||
| 移动 | 判据:最大亮度鉴别等级应≧10级. |
| ||||
| 自定义 | 测试要求:使用D65光源,照度均匀 环境1:全彩 600±100lux 测试标准 Imatest:阶数>18 人眼:阶数>16 环境2:全彩 50±10lux 测试标准 Imatest:阶数>16 人眼:阶数>14 环境3:全彩+黑白 1±0.2lux 测试标准 Imatest:阶数>14 人眼:阶数>12 |
| ||||
| 5、信噪比 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要保证灯箱内壁是标准N5中性灰 3、灯箱色温误差小于200K | 电信 | 测试要求 :使用D65光源,照度均匀,数值600±200lux 色卡占整张画面的1/3~1/2比例; Noise display设置为Pixel SNR(dB)(20*log10(S/N)); 测试标准 R>41dB;G>41dB;B>41dB;Y>41dB |
| ||
| 自定义 | 测试要求 :使用D65光源,照度均匀 色卡占整张画面的1/3~1/2比例; Noise display设置为Pixel SNR(dB)(20*log10(S/N)); 环境1:全彩 600±100lux 测试标准 R>42dB;G>42dB;B>42dB;Y>42dB 环境2:全彩 50±10lux 测试标准 R>42dB;G>42dB;B>42dB;Y>42dB 环境3:全彩 1±0.2lux 测试标准 R>40dB;G>40dB;B>40dB;Y>40dB |
| ||||
| 6、畸变 | 1、普通枪机:光圈F2.2/F2.0,焦距4m | 电信 | 测试要求: 使用D65光源,照度均匀,数值600±200lux 测试标准 建议值:distortion <20% 备注 当前测试两款AI设备,中兴畸变:9.21%、旷视畸变:18.383%。 |  | ||
| 自定义 | 测试要求: 使用D65光源,照度均匀, 环境1:数值600±100lux distortion <20% |
| ||||
| 7、AE/AWB稳定性 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | 环境:D65光源,照度均匀,数值600±100lux 标准:画面恢复正常的时间≤1秒; | |||
| 移动 | ||||||
| 自定义 | 环境:D65光源,照度均匀 环境1:全彩 600±100lux 标准:遮挡画面恢复正常的时间≤1秒; 画面恢复后白平衡正常,无块效应或拖影现象。 环境2:黑白1±0.2lux 标准:遮挡画面恢复正常的时间≤1秒; | |||||
| 云台机 | ||||||
| 8、色散 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要对好焦再测试,对焦距离为iso12233图卡占满图像的距离。 | 电信 | 测试预置条件: 1)灯箱:D65光源,且保证光线照度为600 Lux 测试步骤: 1)设置终端采用H.265 CBR编码; 2)将SFR Chart置于灯箱中,调节camera的位置,测试距离1米进行拍摄; 3)Imatest 分析CA值(色散); 预期结果: CA值≤1.5 |
| ||
| 移动 | ||||||
| 自定义 | 测试预置条件: 1)灯箱:D65光源 环境1:全彩 600±100lux 预期结果: CA值≤0.5 环境2:全彩 50±10lux 预期结果: CA值≤1 环境3:全彩 1±0.2lux 预期结果: CA值≤1.5 |
| ||||
| 9、亮度均一性 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要对好焦再测试,对焦距离为iso12233图卡占满图像的距离。 | 电信 | 测试要求: 照度 600±200lux 色温5500±500k 测试标准 建议值:输出图像画面周边亮度平均值相对于中心亮度平均值之比应大于60% |  | ||
| 移动 | ||||||
| 自定义 | 测试要求: 色温D65 环境1:全彩 600±200lux 测试标准:输出图像画面周边亮度平均值相对于中心亮度平均值之比应大于60% |
| ||||
| 10、纹理 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要对好焦再测试,对焦距离为iso12233图卡占满图像的距离。 | 电信 | 测试要求: 使用D65光源,照度均匀,数值600±200lux 测试标准 MTF50>400LW/PH 备注 厂商均无该指标参考值,80%设备达到参考值 |  | ||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 600±100lux 测试标准 MTF50>400LW/PH 环境2:全彩 50±10lux 测试标准 MTF50>400LW/PH 环境3:全彩 1±0.2lux 测试标准 MTF50>200LW/PH |
| ||||
| 11、视场角 | 1、普通枪机:光圈F2.2/F2.0,焦距4m | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 测试标准:枪机水平视场角>60° |  | ||||
| 12、色彩饱和度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm 2、需要保证灯箱内壁是标准N5中性灰 3、灯箱色温误差小于200K | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 600±100lux 测试标准Saturation≥110% Saturation≤125% 环境2:全彩 50±10lux 测试标准 Saturation≥95% Saturation≤120% 环境3:全彩 1±0.2lux 测试标准 Saturation≥80% Saturation≤120% |
| ||||
| 13、动态范围 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 600±100lux 测试标准 Dynamiac Range≥35dB 环境2:全彩 50±10lux 测试标准 Dynamiac Range≥35dB 环境3:全彩+黑白 1±0.2lux 测试标准 Dynamiac Range≥35dB |
| ||||
| 14、最低照度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | 要求:将灰阶测试卡放置在测试卡位置;调整摄像机位置,让灰阶卡充满画面的中心,无其他阴影;将镜头光圈开到最大,通过客户端将快门和增益设置为最大值;调节光源,降低暗室环境光亮度,直至输出图像的分辨率不低于标称亮度下分辨率的70%;通过照度计读出此时的最低照度值。 判据:应符合产品标称的技术参数要求. |
| ||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 测试标准 最低照度≤1lux |
| ||||
| 15、拖影 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6, | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀,sensor帧率为20fps/25fps 环境1:全彩 600±100lux 拖影消失时间≤1帧 环境2:全彩 50±10lux 拖影消失时间≤5帧 环境3:全彩+黑白 1±0.2lux 拖影消失时间≤20帧 | |||||
| 16 | 电信 | |||||
| 移动 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 中心 600±100lux overshoot≤50% 环境2:全彩 中心 50±10lux overshoot≤50% 环境3:全彩+黑白 中心 1±0.2lux overshoot≤50% |
| ||||
| 17、对比度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 600±100lux 亮区对比度≥40% 暗区对比度≥25% 环境2:全彩 50±10lux 亮区对比度≥40% 暗区对比度≥25% 环境3:全彩+黑白 1±0.2lux 亮区对比度≥30% 暗区对比度≥25% |
| ||||
| 18、过曝欠曝抑制能力 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1: 600±100lux 过曝灰阶数≤4 欠曝灰阶数≤24 环境2:全彩 50±10lux 过曝灰阶数≤4 欠曝灰阶数≤24 环境3:全彩+黑白 1±0.2lux 过曝灰阶数≤4 欠曝灰阶数≤24 |  | ||||
| 19、运动物体清晰度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 200±20lux,0.5m/s,相距3m 视力表≥4.0 环境2:全彩+黑白1±0.2lux,0.5m/s,相距3m 视力表≥4.0 |  | ||||
| 20、抗炫光能力 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 600lux±100lux 对比度 ≥ 70% |
| ||||
| 21、视力表清晰度 | 1、普通枪机:光圈F2.2/F2.0,焦距4m | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 环境1:全彩 600±100lux 视力表 400w≥4.6 300w≥4.5 环境2:全彩 50±10lux 400w≥4.6 300w≥4.5 环境3:全彩+黑白 1±0.2lux 400w≥4.4 300w≥4.3 |  | ||||
| 22、白平衡抗干扰能力 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀,600±100lux 全彩 600lux±100lux W Bal△Cmean ≤ 8 W Bal△Cmax ≤ 20 |
| ||||
| 23、噪声 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 1、全彩 600lux±100lux Noise Y≤ 0.5% 2、全彩 50lux±100lux Noise Y≤ 0.5% 3、全彩+黑白 1lux±0.2lux Noise Y≤ 1% 4、全彩+黑白 0.2lux±0.1lux Noise Y≤ 5% |
| ||||
| 24、抗频闪能力 | 1、普通枪机:光圈F2.2/F2.0,焦距4m AI枪机:光圈F1.6,6mm | 电信 | ||||
| 移动 | ||||||
| 自定义 | 测试要求: 使用D65光源,照度均匀 全彩 频闪失效照度≥100lux |
|
二、图像质量主观评价维度
图像主观评价维度是从人眼的角度,主观评价一幅图像的好坏。之所以要用人眼评价是因为人眼是接收图像的最终载体,而人因此大量的平均的主观评价问问是最为准确的,只是实际工程实践当中大量评价耗时费力,因此往往只进行少量人数的主观评价,验证前面主观评价的结果
评价场景:人物场景,静物场景,远景场景,宽动态场景,低照度场景,红外场景,复杂纹理场景,运动场景,光线变化场景,强光场景,大面积单色场景。
评价维度:强光抑制和弱光补强,紫边,光晕,色散,色彩还原,清晰度,通透性,清晰度。
总结
本节讲了相机图像质量评估方法,凭借这些方法能够较为客观的评价图像质量的好坏。
相关文章:
相机图像质量研究(3)图像质量测试介绍
系列文章目录 相机图像质量研究(1)Camera成像流程介绍 相机图像质量研究(2)ISP专用平台调优介绍 相机图像质量研究(3)图像质量测试介绍 相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距 相机图像质量研究(5)常见问题总结:光学结构对成…...
)
PaddleDetection学习5——使用Paddle-Lite在 Android 上实现实时的人脸检测(C++)
使用Paddle-Lite在 Android 上实现实时的人脸检测 1 环境准备2. 部署步骤2.1 下载Paddle-Lite-Demo2.2 运行face_detection_demo项目3 使用Opencv对后处理进行优化4 开启手机摄像头进行人脸检测1 环境准备 参考前一篇在 Android 上使用Paddle-Lite实现实时的目标检测功能 2. …...
全套电气自动化样例图纸分享,使用SuperWorks自动化版免费设计软件!
今天给大家分享一套完备的电气自动化样例图纸,结构准确、内容清晰,适合初学者入门操作练习。 整套图纸包含图纸目录、原理图、端子列表、连接列表、元件列表、接线图,具有较高的参考价值,请大家点击自行下载文件! 1e8…...
带你实现用自己域名打开Tomcat
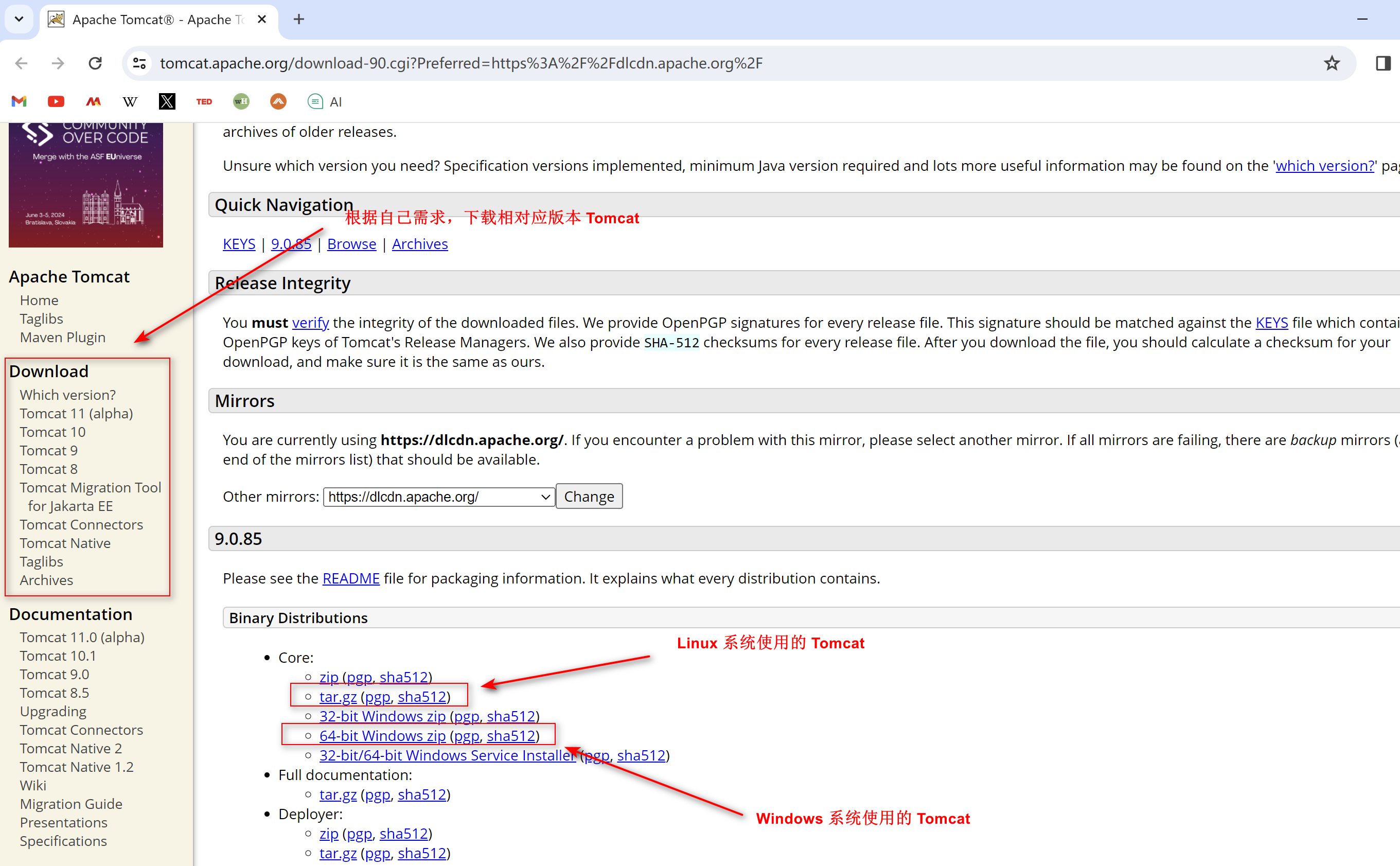
文章目录 Tomcat1.1、Tomcat 下载1.2、Tomcat 文件图解1.3、 启动或关闭 Tomcat1.3.1、 启动1.3.2、 关闭程序2.1、 修改端口号2.2、修改主机名称Tomcat 1.1、Tomcat 下载 首先去Tomcat 官网下载找到我们需要下载的版本 1.2、To...
python coding with ChatGPT 打卡第18天| 二叉树:从中序与后序遍历序列构造二叉树、最大二叉树
相关推荐 python coding with ChatGPT 打卡第12天| 二叉树:理论基础 python coding with ChatGPT 打卡第13天| 二叉树的深度优先遍历 python coding with ChatGPT 打卡第14天| 二叉树的广度优先遍历 python coding with ChatGPT 打卡第15天| 二叉树:翻转…...
)
java基础训练题(1)
1.下列代码段中,存在编译错误的语句是(B C D) byte b1 1,b2 2,b3,b6,b8; final byte b4 4,b5 6,b7; b3 (b1 b2);/*语句1*/ b6 b4 b5 ; /*语句2*/ b8 (b1 b4);/*语句3*/ b7 (b2 b5);/*语句4*/ System.out.println(b3 b6);A: 语句2 B: 语句1 C: 语句3…...

【自定义序列化器】⭐️通过继承JsonSerializer和实现WebMvcConfigurer类完成自定义序列化
目录 前言 解决方案 具体实现 一、自定义序列化器 二、两种方式指定作用域 1、注解 JsonSerialize() 2、实现自定义全局配置 WebMvcConfigurer 三、拓展 WebMvcConfigurer接口 章末 前言 小伙伴们大家好,上次做了自定义对象属性拷贝&#x…...

闲聊电脑(5)装个 Windows(一)
夜深人静,万籁俱寂,老郭趴在电脑桌上打盹,桌子上的小黄鸭和桌子旁的冰箱又开始窃窃私语…… 小黄鸭:冰箱大哥,上次说到硬盘分区和格式化,弄完之后,就该装系统了吧? 冰箱&#x…...
第414题第三大的数(Python))
力扣(leetcode)第414题第三大的数(Python)
414.第三大的数 题目链接:414.第三大的数 给你一个非空数组,返回此数组中 第三大的数 。如果不存在,则返回数组中最大的数。 示例 1: 输入:[3, 2, 1] 输出:1 解释:第三大的数是 1 。 示例 2&a…...
使用wda框架实现IOS自动化测试详解
目录 1、weditor元素定位工具 1.1、weditor的安装和使用 2、wda iOS自动化框架 2.1、wda概述 2.2、wda安装 2.3、wda的使用 2.3.1、全局配置 2.3.2、创建客户端 2.3.3、APP相关操作 1、启动APP 2、关闭APP 3、获取APP状态信息 4、获取当前APP的运行信息 2.3.4、设…...

LeetCode--代码详解 2.两数相加
2.两数相加 题目 难度:中等 给你两个 非空 的链表,表示两个非负的整数。它们每位数字都是按照 逆序 的方式存储的,并且每个节点只能存储 一位 数字。 请你将两个数相加,并以相同形式返回一个表示和的链表。 你可以假设除了数…...
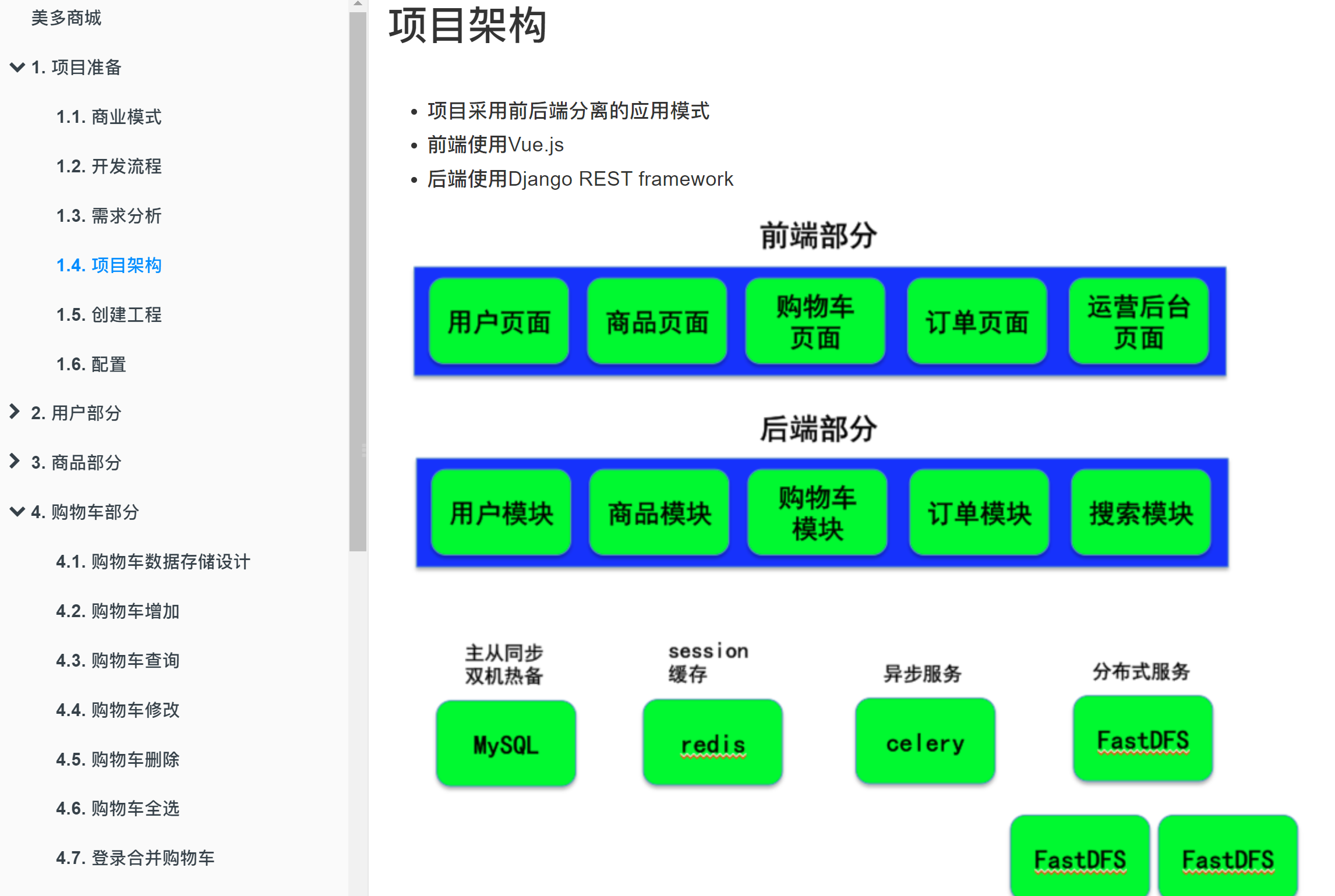
【Django开发】美多商城项目第3篇:用户注册和图片验证码开发(附代码,文档已分享)
本系列文章md笔记(已分享)主要讨论django商城项目开发相关知识。本项目利用Django框架开发一套前后端不分离的商城项目(4.0版本)含代码和文档。功能包括前后端不分离,方便SEO。采用Django Jinja2模板引擎 Vue.js实现…...
代码随想录算法训练营DAY10 | 栈与队列 (1)
理论基础及Java实现参考文章:栈和队列 一、LeetCode 232 用栈实现队列 题目链接:232.用栈实现队列https://leetcode.cn/problems/implement-queue-using-stacks/ 思路:使用两个栈stack1、stack2实现队列;stack1用来存储入队元素&…...

flinkjar开发 自定义函数
编写自定义加密函数,继承ScalarFunction类,实现eval方法,参数个数类型和返回值根据业务来自定义。 import org.apache.flink.table.functions.ScalarFunction; import javax.crypto.Cipher; import javax.crypto.KeyGenerator; import javax…...
Golang 学习(一)基础知识
面向对象 Golang 也支持面向对象编程(OOP),但是和传统的面向对象编程有区别,并不是纯粹的面向对象语言。 Golang 没有类(class),Go 语言的结构体(struct)和其它编程语言的类(class)有同等的地位,Golang 是基于 struct 来实现 OOP…...

C++学习:string的了解
1.string的介绍 #include<string> 对于字符串的操作 自动处理内存的分配和释放 2.string的声明与初始化 1.std::string str1;空的 2.string str2 "afhsihsa" 3.string str3 str2 4.string str3 str2.substr(0,5) .substr(位置,长度) 5.c…...
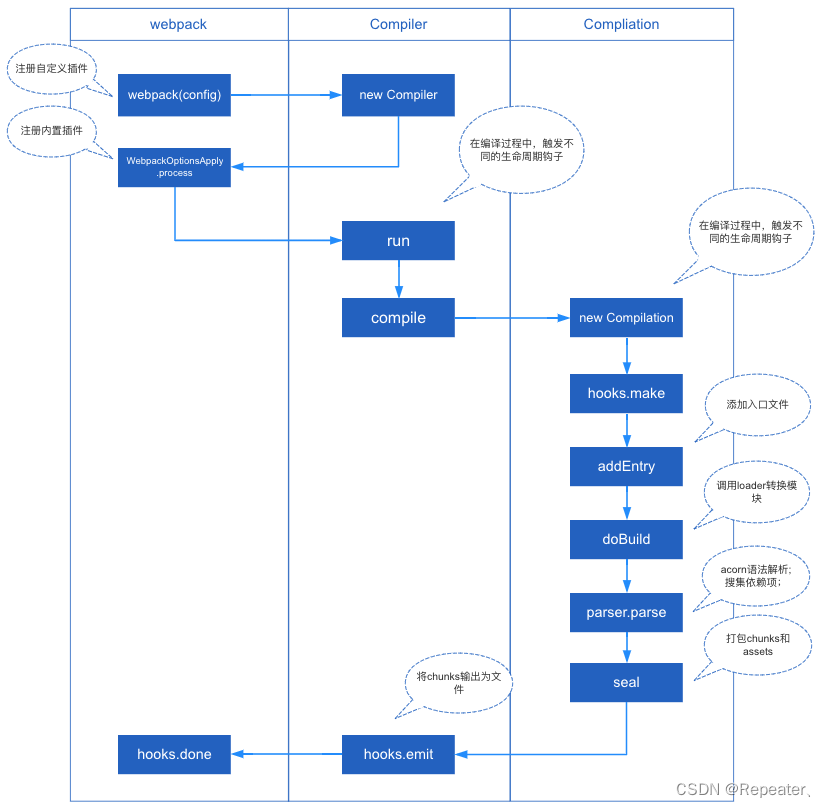
Webpack源码浅析
webpack启动方式 webpack有两种启动方式: 通过webpack-cli脚手架来启动,即可以在Terminal终端直接运行; webpack ./debug/index.js --config ./debug/webpack.config.js通过require(webpack)引入包的方式执行;其实第一种方式最终…...

Hadoop:HDFS学习巩固——基础习题及编程实战
一 HDFS 选择题 1.对HDFS通信协议的理解错误的是? A.客户端与数据节点的交互是通过RPC(Remote Procedure Call)来实现的 B.HDFS通信协议都是构建在IoT协议基础之上的 C.名称节点和数据节点之间则使用数据节点协议进行交互 D.客户端通过一…...

SASS 官方文档速通
前言:参考 Sass 中文网。 一. 特色功能 Sass 是一款强化 CSS 的辅助工具,在 CSS 语法的基础上增加了变量、嵌套、混合、导入等高级功能。有助于组织管理样式文件,更高效地开发项目。 二. 语法格式 .scss 拓展名:在 CSS3 语法的基…...

《动手学深度学习(PyTorch版)》笔记7.4
注:书中对代码的讲解并不详细,本文对很多细节做了详细注释。另外,书上的源代码是在Jupyter Notebook上运行的,较为分散,本文将代码集中起来,并加以完善,全部用vscode在python 3.9.18下测试通过&…...

集团型企业BI试点,为什么一定要先做多域资源隔离?
艾瑞咨询《2025年中国BI市场报告》显示,超7成集团型企业的首次BI试点项目因跨业务单元权限冲突、数据口径混乱延期或终止(统计样本覆盖120家年营收超50亿的国内集团企业,统计窗口为2022-2024年试点项目全生命周期)。这个数据和大部…...

别再只查‘待办’了!Flowable任务查询的三种高级场景:拾取、归还与候选组权限控制详解
Flowable任务管理的三大高阶场景:从候选池到个人待办的完整控制策略 当我们在处理业务流程自动化时,任务管理往往是最容易被简化的环节。大多数开发者止步于基础的待办列表查询,却忽视了任务流转过程中的精细控制。本文将带您深入Flowable任务…...

牙科手术显微镜市场:其中中国市场占比超15%
在口腔诊疗向精细化、微创化演进的进程中,牙科手术显微镜作为核心光学放大设备,凭借其高照度、高景深与高清晰度特性,成为提升根管治疗、牙周手术及种植修复等环节精准性的关键工具。该设备集成连续变倍观察、同轴照明、术野调焦及影像记录系…...

BiliTools:你的跨平台B站资源智能下载助手,轻松保存高清视频与无损音频
BiliTools:你的跨平台B站资源智能下载助手,轻松保存高清视频与无损音频 【免费下载链接】BiliTools A cross-platform bilibili toolbox. 跨平台哔哩哔哩工具箱,支持下载视频、番剧等等各类资源 项目地址: https://gitcode.com/GitHub_Tren…...

SDXL 1.0电影级绘图工坊:RTX 4090专属,5分钟零基础部署教程
SDXL 1.0电影级绘图工坊:RTX 4090专属,5分钟零基础部署教程 1. 为什么选择SDXL 1.0电影级绘图工坊 如果你正在寻找一款能在RTX 4090上发挥极致性能的AI绘图工具,SDXL 1.0电影级绘图工坊绝对是你的不二之选。这款工具专为4090显卡优化&#…...

IIS请求筛选规则实战:手把手教你用‘拒绝字符串’精准拦截SQL注入和恶意爬虫
IIS请求筛选规则实战:构建精准防御体系的完整指南 当你的网站遭遇SQL注入攻击时,服务器日志里那些可疑的 OR 11--字符串是否让你夜不能寐?面对每天数十万次的恶意爬虫扫描,是否觉得传统的防火墙规则力不从心?IIS的请求…...

Keyv自定义序列化教程:超越JSON,支持更多数据类型
Keyv自定义序列化教程:超越JSON,支持更多数据类型 【免费下载链接】keyv jaredwray/keyv: 这是一个分布式键值存储库,用于在多个节点上存储数据。适合用于需要分布式存储和访问的场景。特点:易于使用,支持多种数据存储…...
)
51单片机入门-直流电机(十五)
目录:1.直流电机驱动(PWM)2.LED呼吸灯&直流电机调速1.直流电机驱动(PWM)让他转的快一些让他转2us停1us2.LED呼吸灯&直流电机调速点亮一个LED:在循环里:点亮熄灭显示暗一些:让…...

AWCII 040 CPU模块
AWCII 040 CPU 模块AWCII 040 是工业自动化控制系统中的中央处理单元(CPU 模块),主要用于执行控制程序、数据运算及系统管理,是整个控制系统的核心“大脑”。一、基本概述AWCII 040 CPU 模块集成了处理器、存储单元及系统管理功能…...

高性能无线基带FPGA实现:开源802.11 WiFi实时信号处理架构解析
高性能无线基带FPGA实现:开源802.11 WiFi实时信号处理架构解析 【免费下载链接】openwifi open-source IEEE 802.11 WiFi baseband FPGA (chip) design: driver, software 项目地址: https://gitcode.com/gh_mirrors/op/openwifi Openwifi是一个基于软件定义…...