TI毫米波雷达开发——High Accuracy Demo 串口数据接收及TLV协议解析 matlab 源码
TI毫米波雷达开发——串口数据接收及TLV协议解析 matlab 源码
- 前置基础
- 源代码功能说明
- 功能演示视频
- 文件结构
- 01.bin / 02.bin
- ParseData.m
- read_file_and_plot_object_location.m
- read_serial_port_and_plot_object_location.m
- 函数解析
- configureSport(comportSnum)
- readUartCallbackFcn(sphandle, 0);
- 缓冲区控制
- TLV协议解析
- Magic Word 搜索及确认
- TLV Header 解析
- TLV Body 解析
- 协议解析
- 数据处理函数及绘图
- 源代码
前置基础
需熟悉TLV 协议 并对TI 基本的 TLV 输出套路有基本的概念。
源代码功能说明
一个使用matlab对6843 High Accuracy Demo 进行数据解析的Demo Project。
适用于TI 毫米波雷达 TLV 协议架构解析的Matlab上位机代码走读博客。
功能演示视频
Matlab mmWave TLV 协议解析功能演示
文件结构
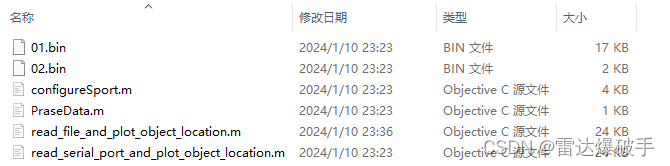
01.bin / 02.bin
通过串口捕获到的原始数据保存在当前bin文件中。
ParseData.m
函数执行入口
read_file_and_plot_object_location.m
读取bin文件并且绘图
read_serial_port_and_plot_object_location.m
读取串口并保存数据
函数解析
configureSport(comportSnum)
配置串口
% 配置串口号及波特率。
% 串口接收的数据存在InputBufferSize中。
function [sphandle] = configureSport(comportSnum,BaudRate)global BYTES_AVAILABLE_FCN_CNT;if ~isempty(instrfind('Type','serial'))disp('Serial port(s) already open. Re-initializing...');delete(instrfind('Type','serial')); % delete open serial ports.endcomportnum_str = ['COM' num2str(comportSnum)];sphandle = serial(comportnum_str,'BaudRate',BaudRate);set(sphandle,'InputBufferSize', 2^20);set(sphandle,'Timeout',10);set(sphandle,'ErrorFcn',@dispError);set(sphandle,'BytesAvailableFcnMode','byte');set(sphandle,'BytesAvailableFcnCount', 2^20+1);%BYTES_AVAILABLE_FCN_CNT);set(sphandle,'BytesAvailableFcn',@readUartCallbackFcn);fopen(sphandle);
return
readUartCallbackFcn(sphandle, 0);
串口数据接收并放入缓冲区并控制
function [] = readUartCallbackFcn(obj, event)
global bytevecAcc;
global bytevecAccLen;
global readUartFcnCntr;
global BYTES_AVAILABLE_FLAG
global BYTE_VEC_ACC_MAX_SIZE
global EX相关文章:
TI毫米波雷达开发——High Accuracy Demo 串口数据接收及TLV协议解析 matlab 源码
TI毫米波雷达开发——串口数据接收及TLV协议解析 matlab 源码 前置基础源代码功能说明功能演示视频文件结构01.bin / 02.binParseData.mread_file_and_plot_object_location.mread_serial_port_and_plot_object_location.m函数解析configureSport(comportSnum)readUartCallback…...
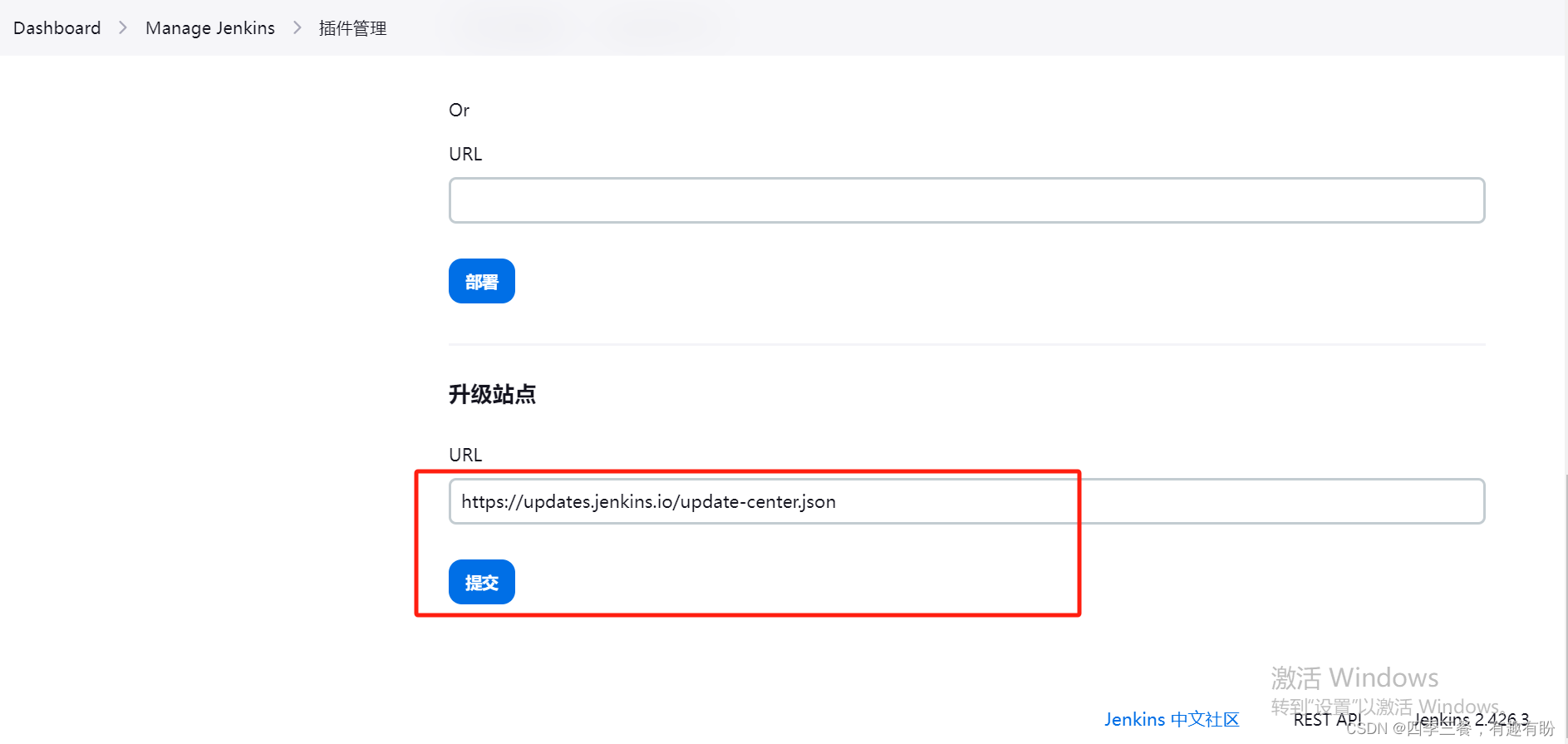
基于tomcat运行jenkins常见的报错处理
目录 1.jenkins.util.SystemProperties$Listener错误 升级jdk11可能遇到的坑 2.java.lang.RuntimeException: Fontconfig head is null, check your fonts or fonts configuration 3.There were errors checking the update sites: UnknownHostException:updates.jenkins.i…...

算法学习——LeetCode力扣二叉树篇1
算法学习——LeetCode力扣二叉树篇1 144. 二叉树的前序遍历 144. 二叉树的前序遍历 - 力扣(LeetCode) 描述 给你二叉树的根节点 root ,返回它节点值的 前序 遍历。 示例 示例 1: 输入:root [1,null,2,3] 输出&a…...

二叉树的遍历及创建
typedef char T;struct TreeNode {T _data;TreeNode* left;TreeNode* right; }; 1、二叉树的遍历---DFS 3 5 6 …...
图形学:Transform矩阵(3维 2维) 平移,旋转,缩放
0. 简介 在图形学领域中,Transform矩阵(变换矩阵)是一种表示图形对象在二维或三维空间中的位置、方向和大小变化的数学工具。它们用于执行各种图形变换,如平移、旋转、缩放。Transform矩阵通常表示为一个二维或三维矩阵ÿ…...

Docker学习历程
Docker学习历程 Q1、docker还没启动Q2、Docker容器名称冲突的问题Q3:启动minio时发现,容器已经再重启Q4:容器被占用的情况Q5:查看日志 Q1、docker还没启动 docker run --env MODEstandalone --name nacos --restartalways -d -p …...

Android:Volley框架使用
3.15 Volley框架使用 Volley框架主要作为网络请求,图片加载工具。当应用数据量小、网络请求频繁,可以使用Volley框架。 框架Github地址:https://github.com/google/volley Volley框架的简单使用,创建项目Pro_VolleyDemo。将Github上下载Volley框架源代码,volley-master.zi…...
)
前端修炼手册(uniapp的api篇)
一、页面相关API uni.navigateTo 该API用于跳转到应用内的某个页面,可以传递参数。 uni.navigateTo({url: /pages/detail/detail?id1 })uni.redirectTo 该API用于关闭当前页面并跳转到应用内的某个页面,可以传递参数。 uni.redirectTo({url: /pages/…...

JAVA面试题16
什么是Java中的反射机制?它的用途是什么? 答案:Java的反射机制是指在运行时,通过获取类的信息来操作类的属性、方法和构造函数等。它可以用来创建对象、调用方法,以及实现动态代理等功能。 什么是Java中的泛型&#x…...

P1044 [NOIP2003 普及组] 栈题解
题目 有一个单端封闭的管子,将N(1<N<18)个不同的小球按顺序放入管子的一端。在将小球放入管子的过程中也可以将管子最顶上的一个或者多个小球倒出来。请问:倒出来的方法总数有多少种? 输入输出格式 输入格式 输入文件只含一个整数n…...
)
【DSP】数字信号处理发展里程碑(AI【文心一言】 辅助生成)
在远离尘嚣的学术殿堂中,数字信号处理(DSP)这一学科犹如一颗璀璨的明珠,其发展历程充满了传奇色彩。下面,就让我们一起穿越时空,回到那些激动人心的时刻,见证数字信号处理从无到有、从弱到强的壮…...
【JavaScript 】finally() 方法和Filter() 方法
JavaScript 中的finally() 方法 finally是 JavaScript 构造中使用的方法try-catch。try它在and阻塞之后执行catch,无论 Promise 是已履行还是已拒绝。该函数的主要作用是执行必要的清理任务并向用户传达消息。一个常见的用例可能是通知用户“您的请求已被处理”&am…...

假期作业8
线程和进程服务器 线程 #include <myhead.h>#define SIP "192.168.0.114" #define SPORT 8888void *task(void *arg){printf("客户端连接\n");sleep(1);pthread_exit(NULL); }int main(int argc, const char *argv[]) {int sfd socket(AF_INET, S…...
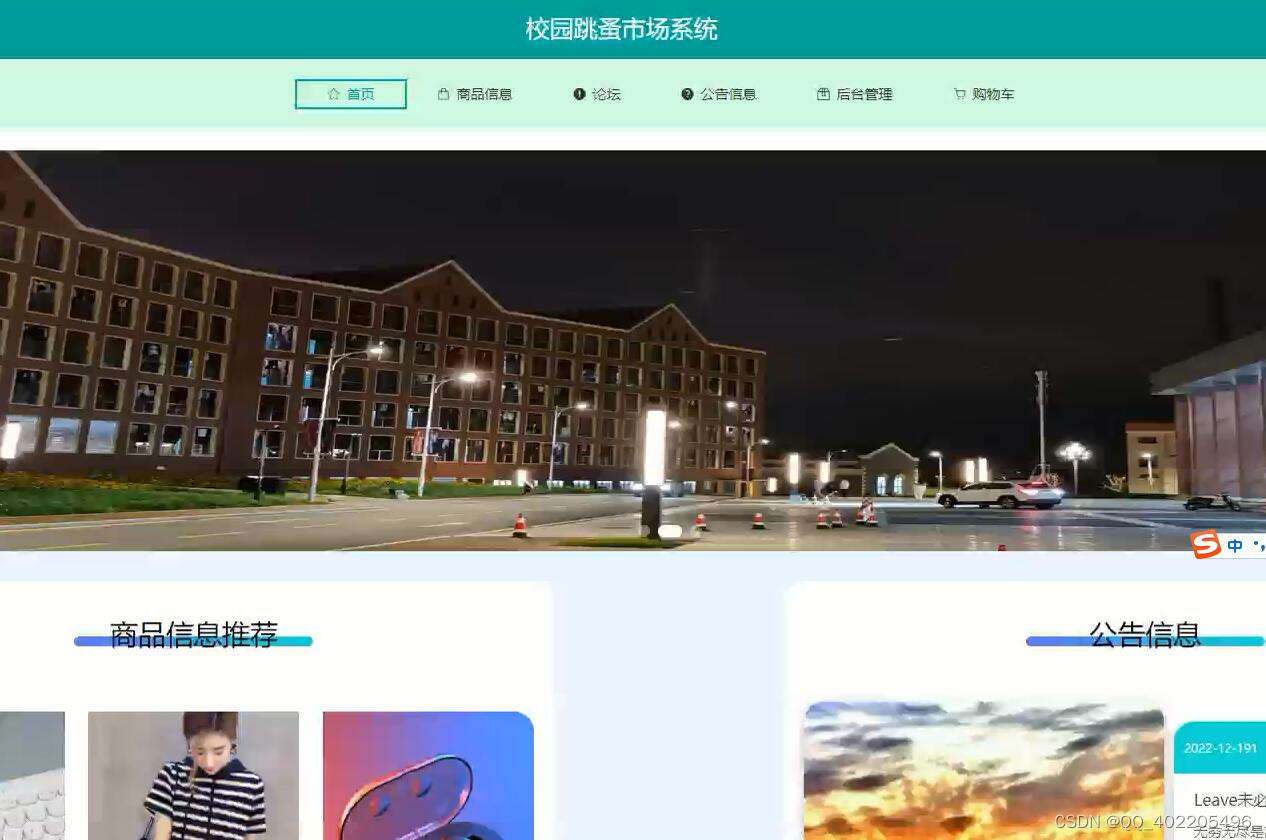
基于vue+node.js的校园跳蚤市场系统多商家
校园跳蚤市场系统可以在短时间内完成大量的数据处理、帮助用户快速的查找校园跳蚤市场相关信息,实现的效益更加直观。校园跳蚤市场系统中采用nodejs技术和mysql数据库。主要包括管理员、发布者和用户三大部分,主要功能是实现对个人中心、用户管理、发布者…...
Linux操作系统基础(六):Linux常见命令(一)
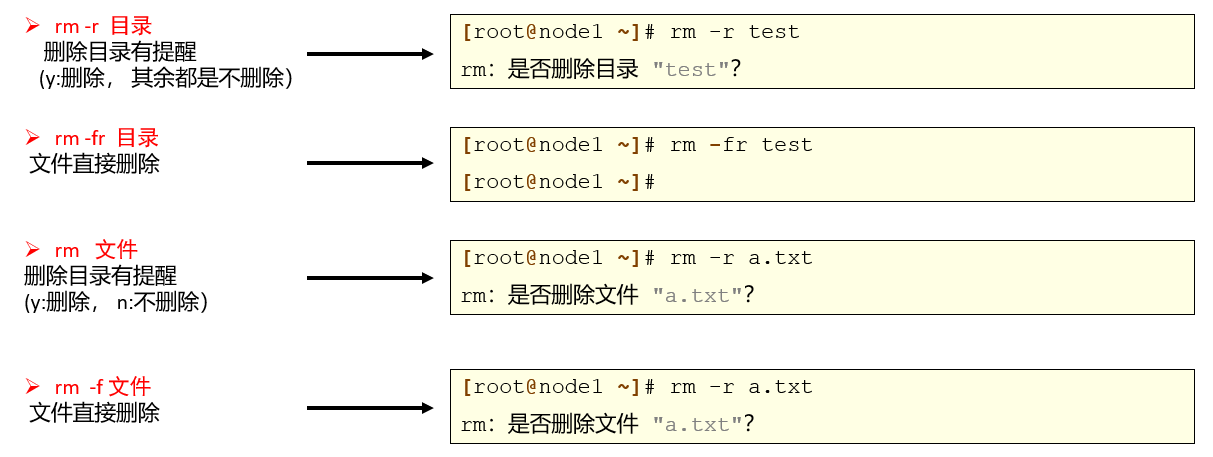
文章目录 Linux常见命令 一、命令结构 二、ls命令 三、cd命令 四、mkdir命令 五、touch命令 六、rm命令 七、cp命令 八、mv命令 九、cat命令 十、more命令 Linux常见命令 一、命令结构 command [-options] [parameter]说明: command : 命令名, 相应功能的英文单词…...

【Android-Compose】Material3 新版下拉刷新 PullRefresh
这里写自定义目录标题 1、(新)用于 Jetpack Compose 的刷新指示器1.1 SwipeRefresh 迁移到新的 PullRefresh1.2 迁移步骤1.3 自定义指示器 2、原始文档(SwipeRefresh )的使用依赖导入2.1 使用方法2.2 完整示例(包括视图…...
FANUC机器人外部远程启动的相关参数设置示例
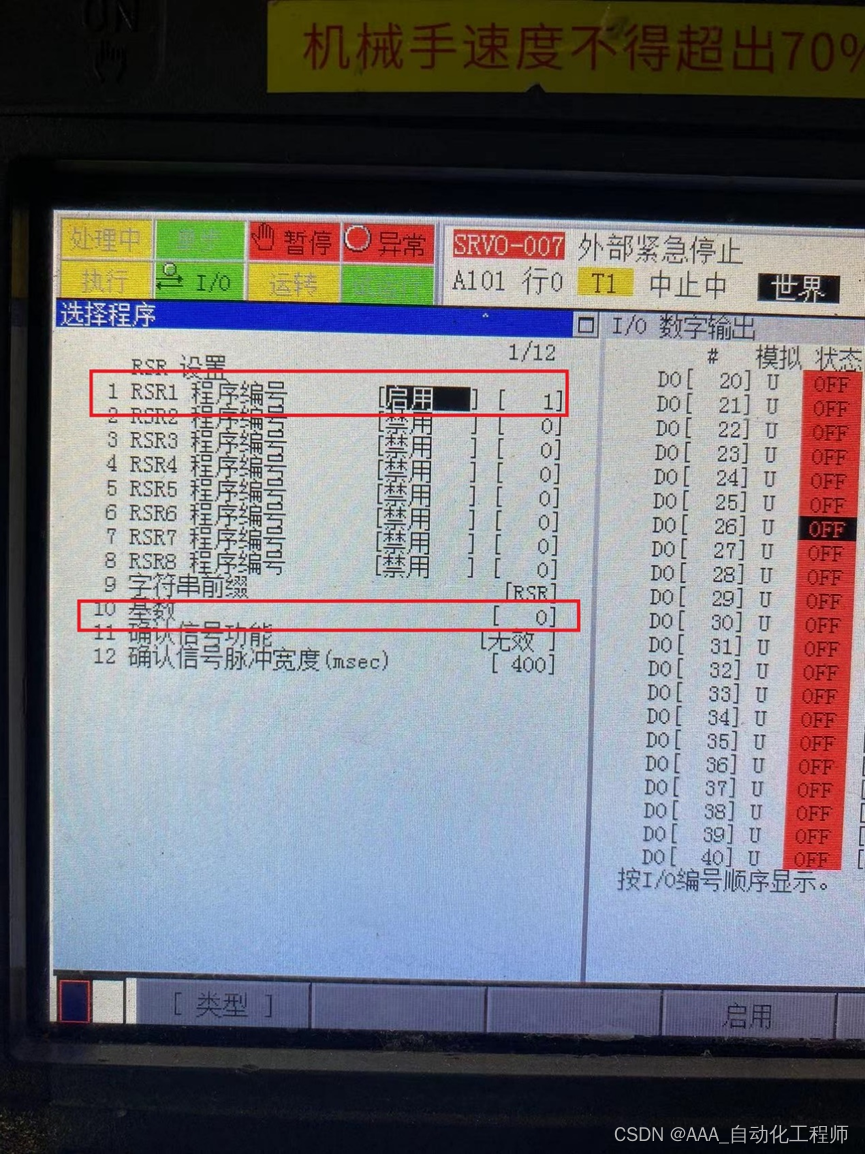
FANUC机器人外部远程启动的相关参数设置示例 如下图所示,在MENU---设置---选择程序中,设置程序选择模式:RSR(这个根据自己实际使用的自动启动方式来决定,你用RSR选RSR,用PNS就选PNS), 自动运行开始方法:选择UOP,即RSR1-RSR8的启动信号分别对应UI9-UI16, 最后,点击…...

供货商、品牌方、供应链如何对接快团团头部大团长?这三个关键点你一定要记住
供货商、品牌方、供应链如何对接快团团头部大团长?这三个关键点你一定要记住 有很多的品牌方、供应链、工厂在线上拿到了不少的社群快团团团长的资源,但是真正对接上的寥寥无几,哪怕自己的品做得非常好,但是都在这个行业触了霉头…...
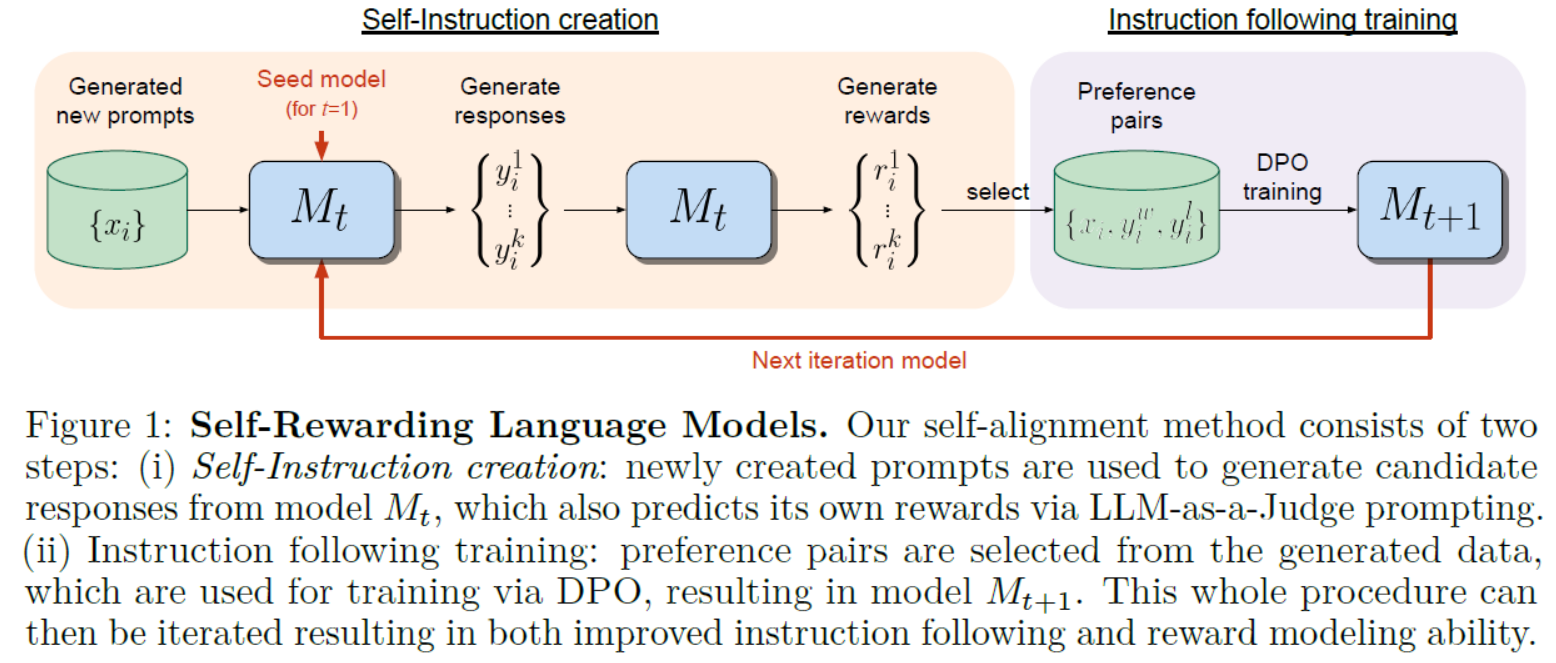
LLMs之Llama2 70B:《Self-Rewarding Language Models自我奖励语言模型》翻译与解读
LLMs之Llama2 70B:《Self-Rewarding Language Models自我奖励语言模型》翻译与解读 目录 《Self-Rewarding Language Models》翻译与解读 Abstract 5 Conclusion结论 6 Limitations限制 《Self-Rewarding Language Models》翻译与解读 地址 文章地址࿱…...
电商小程序06用户审核
目录 1 创建自定义应用2 显示待办数量3 创建审核页面4 开发审核功能5 搭建布局6 最终效果总结 上一篇我们讲解了用户注册的功能,用户注册之后状态是待审核,需要管理员进行审核。通常给管理员提供一套PC端的软件进行相关的操作,在低代码中&…...

8位字节的崛起:从历史必然到现代计算基石
1. 项目概述:从“为什么是8位”说起最近在整理一份关于计算机二进制表示的小册子时,被一个看似简单却直击核心的问题给问住了:“为什么我们今天用的计算机,尤其是x86架构,普遍采用8位作为一个字节(Byte&…...

避坑指南:Vivado增量综合的‘甜蜜区’与‘雷区’——从日志文件看何时该用、何时该弃
Vivado增量综合实战决策手册:如何精准识别高效区间与风险边界 在FPGA开发领域,时间就是竞争力。当项目进入迭代优化阶段,每次按下综合按钮后的等待时间,都可能成为团队效率的隐形杀手。Vivado的增量综合功能就像一把双刃剑——用对…...

TPFanCtrl2:ThinkPad智能风扇控制终极指南,彻底解决过热与噪音问题
TPFanCtrl2:ThinkPad智能风扇控制终极指南,彻底解决过热与噪音问题 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 你是否曾经在安静的会议室中…...

手把手教你为YOLOv8 TensorRT推理写一个C++接口:从DLL封装到QT界面调用
深度解析:构建高效YOLOv8 TensorRT推理C接口的工程实践 在工业视觉和边缘计算领域,将深度学习模型封装为可复用的软件组件已成为提升开发效率的关键。本文将以YOLOv8模型为例,深入探讨如何设计一个专业级的TensorRT推理C接口,重点…...

如何快速掌握unnpk:网易游戏资源解包的完整入门指南
如何快速掌握unnpk:网易游戏资源解包的完整入门指南 【免费下载链接】unnpk 解包网易游戏NeoX引擎NPK文件,如阴阳师、魔法禁书目录。 项目地址: https://gitcode.com/gh_mirrors/un/unnpk 你是否曾经好奇过网易游戏《阴阳师》中那些精美的角色立绘…...

终极指南:如何在Mac上免费实现NTFS读写功能
终极指南:如何在Mac上免费实现NTFS读写功能 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and management for NTFS dri…...

STM32H743实战:用SN65HVD230驱动14个伺服电机,1M波特率稳如老狗
STM32H743与SN65HVD230构建高密度CANopen伺服控制系统的工程实践 在工业自动化与机器人控制领域,多轴协同运动控制对总线系统的实时性和稳定性提出了严苛要求。本文将深入剖析基于STM32H743微控制器与SN65HVD230 CAN收发器搭建的高密度伺服控制系统,分享…...

【linux学习】linux的一些奇怪知识,方便日常使用
我是程序员小青蛙,下面介绍关于linux的知识。前言一些基本知识,方便利用,比如热键[tab],[ctrl]-c,[ctrl]-d,粘滞位,权限等;xshell中的复制粘贴,Ctrlinsert,复制shiftinsert->粘贴一、重要的几…...

WandEnhancer:彻底解锁WeMod专业版功能的终极解决方案
WandEnhancer:彻底解锁WeMod专业版功能的终极解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod免费版的种种限制而烦恼吗…...

Linux依赖关系梳理排查方法
Linux依赖关系梳理排查方法本文面向具备一定 Linux 基础的技术人员,围绕依赖关系梳理展开,重点讨论上下游服务、网络路径和故障影响。在中级运维和系统管理工作中,这类主题常常与配置变更、资源状态、权限边界、自动化任务和业务影响交织在一…...