【Chrono Engine学习总结】4-vehicle-4.1-vehicle的基本概念
由于Chrono的官方教程在一些细节方面解释的并不清楚,自己做了一些尝试,做学习总结。
1、基本介绍
Vehicle Overview
Vehicle Mannel
Vehicle的官方demo
1.1 Vehicle的构型
- 一个车辆由许多子系统构成:悬挂、转向、轮子/履带、刹车/油门、动力传统系统(driverline)。
- Chrono提供了一些典型的车辆模型,例如:悍马车、小型轿车等 vehicle models,只需要直接代码选定即可;
- 如果不用官方的车型,就需要自己定义各种子系统。chono提供一些典型的子系统构型,例如悬挂包括:双横臂、前麦花臣支柱等 悬挂类型,转向包括:转向垂臂( Pitman arm)等转向类型。
- 如果连官方的子系统都不想用,就需要自己定义一些弹簧/轴的连接,就复杂一些,一般采用JSON文件的方式,这样比较清晰明了。
1.2 Vehicle部分仿真的逻辑
https://api.projectchrono.org/vehicle_overview.html#vehicle_simulation_loop
每一步仿真时,依次执行:获取系统输出、同步各个系统(synchronize system)、系统动力学仿真前进一步(advance system)。
- 在各个系统同步时,可能不仅包括vehicle的模块,还包括可视化等多个模块,同时vehicle部分需要同步:驾驶控制器、地型交互、车体、可视化等模块,如有。
- 在同步之后,进行advance操作,前进一步。
正因为如此,在仿真代码中,每次loop最后会有这么两段:
// Update modules (process inputs from other modules
driver->Synchronize(time);
terrain.Synchronize(time);
hmmwv.Synchronize(time, driver_inputs, terrain);
vis->Synchronize(time, driver_inputs);
// Advance simulation for one timestep for all modules
driver->Advance(step_size);
terrain.Advance(step_size);
hmmwv.Advance(step_size);
vis->Advance(step_size);
1.3 vehicle的可视化
Vehicle的可视化与之前的整体仿真环境的可视化有些相同,但不完全相同。相同之处是,是选用irrlicht、还是OpenGL、还是离线POV-Ray可视化。我这里采用irrlicht。
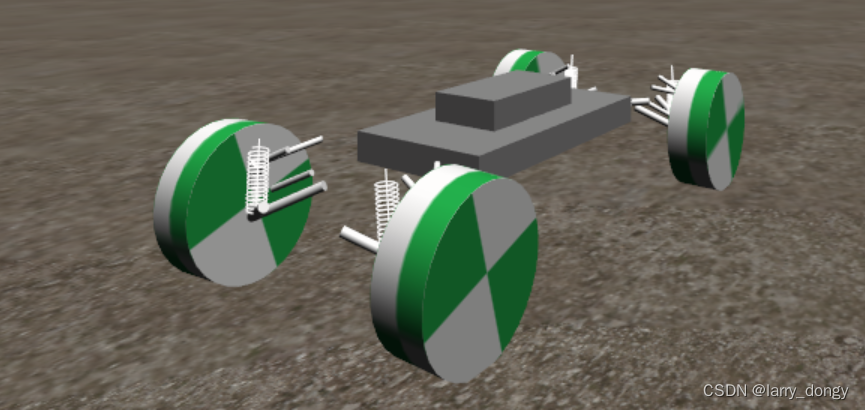
除此之外,由于vehicle包括很多子模块,例如地盘、悬挂、轮胎等,在仿真时可以选择是否进行显示。一般显示方式为三种:不显示(VisualizationType::None)、显示基础结构(PRIMITIVES)、显示完整表面mesh(MESH)。例如,地盘、悬挂、转向、轮胎、外壳,全部显示MESH和只显示基础结构分别是这样的:

2. 车辆控制系统
2.1 控制系统基础概念
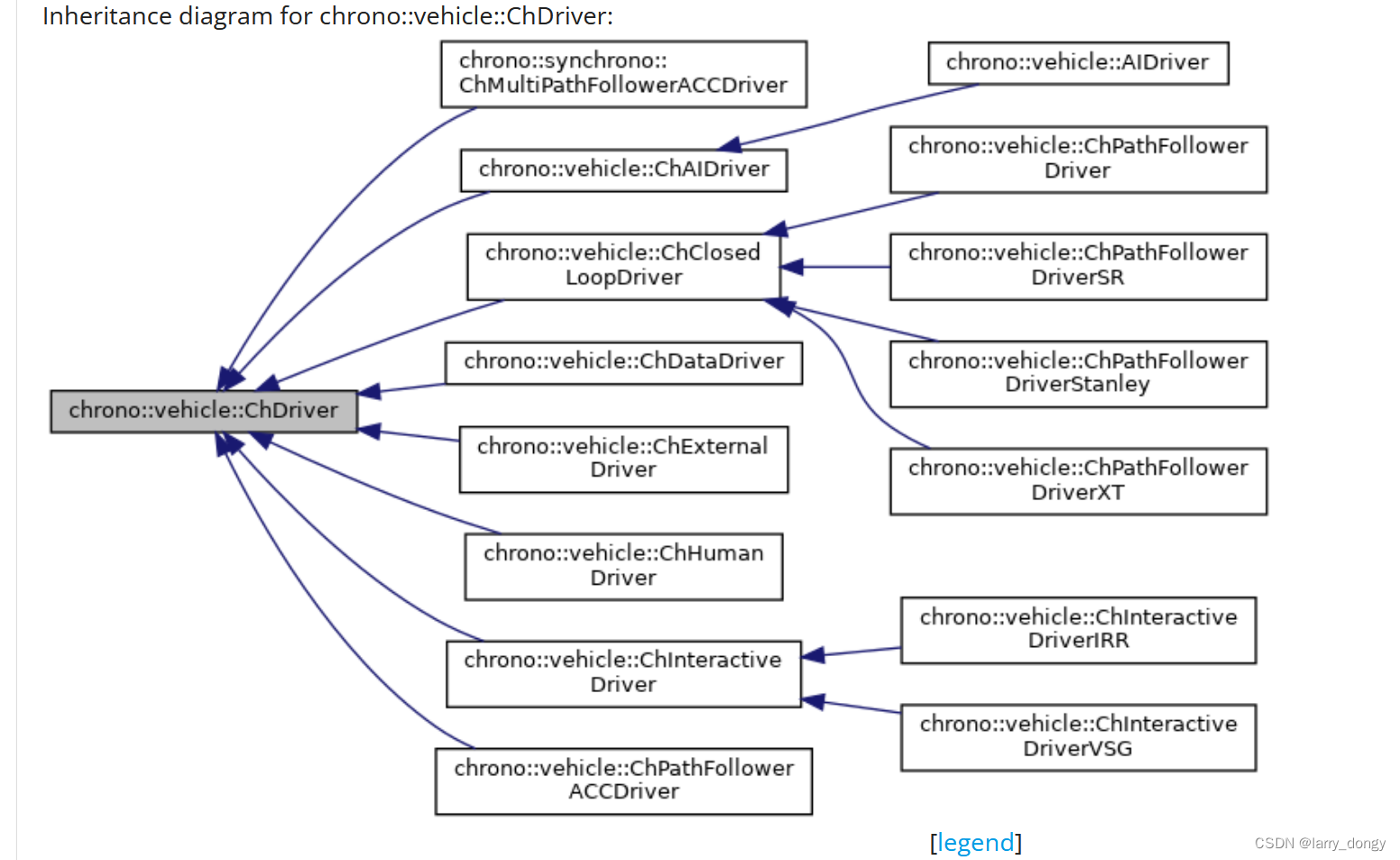
车辆控制系统在chrono里面称作“driver”,ChDriver。
对于车辆的控制,主要控制量只有两个:油门throttle(和刹车brake)、转向(steering 左/右)。
控制系统包括:交互控制ChIteractiveDriver、闭环控制ChClosedLoopDriver、AI Driver等多种方式,每个模块的控制代码写法不同。这里暂不展开介绍。
2.2 交互控制系统
这里采用较为简单的交互控制。交互控制通过可视化模块获取来自键盘的输入控制量,通过WSAD分别控制:加油门、刹车、左转向、右转向。需要注意,在开启交互控制前,需要按键j启动键盘控制,否则无效(注意是否关闭了中文输入法)。
交互系统部分的代码是这样的:
DriverInputs driver_inputs = driver->GetInputs();
之后,在调用driver->Advance函数时,即对车辆的控制量进行更新。
需要注意的是,在交互控制中,每次按键改变的是上述控制量的增量,即按一下油门,油门会增大一些。因此,并不是直接控制的速度,所以在操作时,需要练习手感。
在程序运行时,右上角会显示控制量和车辆状态:
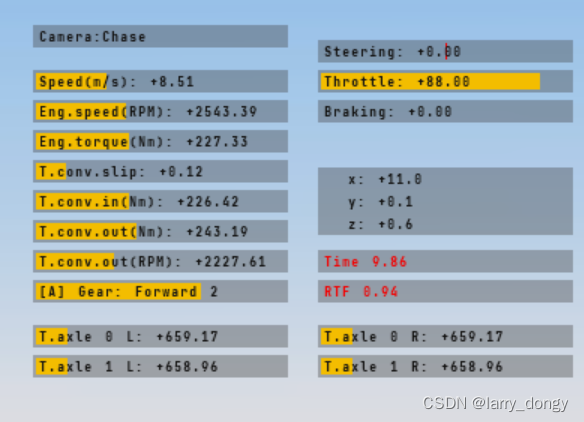
可以看出,此时的油门是+88(油门控制量默认是0-100),刹车是0(通过按键S将油门在减为0后,刹车会上来),此时车速是8.51m/s,以及一些其他参数。
3、官方例子
这次以官方例子进行介绍:
#include "chrono/core/ChStream.h"
#include "chrono/utils/ChUtilsInputOutput.h"
#include "chrono/utils/ChFilters.h"
#include "chrono_vehicle/ChConfigVehicle.h"
#include "chrono_vehicle/ChVehicleModelData.h"
#include "chrono_vehicle/terrain/RigidTerrain.h"
#include "chrono_vehicle/output/ChVehicleOutputASCII.h"
#include "chrono_models/vehicle/hmmwv/HMMWV.h"
#include "chrono_thirdparty/filesystem/path.h"
#include "chrono_vehicle/driver/ChInteractiveDriverIRR.h"
#include "chrono_vehicle/wheeled_vehicle/ChWheeledVehicleVisualSystemIrrlicht.h"
#include <iostream>using namespace chrono;
using namespace chrono::irrlicht;
using namespace chrono::vehicle;
using namespace chrono::vehicle::hmmwv;// Simulation step sizes
double step_size = 1e-3;
double tire_step_size = step_size;
double t_end = 1000;// Time interval between two render frames
double render_step_size = 1.0 / 50; // FPS = 50int main(int argc, char* argv[]) {chrono::SetChronoDataPath("E:/codeGit/chrono/chrono/build/data/"); // change the default data loading path.chrono::vehicle::SetDataPath("E:/codeGit/chrono/chrono/build/data/vehicle/"); // change the vehicle data pathChContactMethod contact_method = ChContactMethod::SMC; // 设定碰撞类型// Create the HMMWV vehicle, set parameters, and initialize// 创建一个HMMWV车,注意如果有vehicle模块,则不需要重新定义一个物理系统,这个vehicle自带一个系统,可以直接给别的模块调用。HMMWV_Full hmmwv;hmmwv.SetCollisionSystemType(ChCollisionSystem::Type::BULLET);hmmwv.SetContactMethod(contact_method);hmmwv.SetChassisCollisionType(CollisionType::NONE);hmmwv.SetChassisFixed(false);hmmwv.SetInitPosition(ChCoordsys<>({ 0, 0, 0.5 }, { 1, 0, 0, 0 }));hmmwv.SetEngineType(EngineModelType::SHAFTS);hmmwv.SetTransmissionType(TransmissionModelType::SHAFTS);hmmwv.SetDriveType(DrivelineTypeWV::AWD);hmmwv.UseTierodBodies(true);hmmwv.SetSteeringType(SteeringTypeWV::PITMAN_ARM);hmmwv.SetBrakeType(BrakeType::SHAFTS);hmmwv.SetTireType(TireModelType::PAC02);hmmwv.SetTireStepSize(tire_step_size);hmmwv.Initialize();// Visualization type for vehicle parts (PRIMITIVES, MESH, or NONE)// 设置车辆各个模块的可视化程度。VisualizationType chassis_vis_type = VisualizationType::PRIMITIVES;VisualizationType suspension_vis_type = VisualizationType::PRIMITIVES;VisualizationType steering_vis_type = VisualizationType::PRIMITIVES;VisualizationType wheel_vis_type = VisualizationType::PRIMITIVES;VisualizationType tire_vis_type = VisualizationType::PRIMITIVES;hmmwv.SetChassisVisualizationType(chassis_vis_type);hmmwv.SetSuspensionVisualizationType(suspension_vis_type);hmmwv.SetSteeringVisualizationType(steering_vis_type);hmmwv.SetWheelVisualizationType(wheel_vis_type);hmmwv.SetTireVisualizationType(tire_vis_type);// Create the terrain 创建地形,并设置地形的一些物理参数。RigidTerrain terrain(hmmwv.GetSystem());ChContactMaterialData minfo;minfo.mu = 0.9f;minfo.cr = 0.01f;minfo.Y = 2e7f;auto patch_mat = minfo.CreateMaterial(contact_method);// Rigid terraindouble terrainHeight = 0; // terrain height (FLAT terrain only)double terrainLength = 200.0; // size in X directiondouble terrainWidth = 200.0; // size in Y directionstd::shared_ptr<RigidTerrain::Patch> patch;patch = terrain.AddPatch(patch_mat, CSYSNORM, terrainLength, terrainWidth);patch->SetTexture(vehicle::GetDataFile("terrain/textures/dirt.jpg"), 200, 200);patch->SetColor(ChColor(0.8f, 0.8f, 0.5f));terrain.Initialize();// 创建基于irrlicht的可视化,以及交互控制系统。定义每次控制量、可hi话等内容。// ------------------------------------------------------------------------------// Create the vehicle run-time visualization interface and the interactive driver// ------------------------------------------------------------------------------// Set the time response for steering and throttle keyboard inputs.double steering_time = 1.0; // time to go from 0 to +1 (or from 0 to -1)double throttle_time = 1.0; // time to go from 0 to +1double braking_time = 0.3; // time to go from 0 to +1std::shared_ptr<ChVehicleVisualSystem> vis;std::shared_ptr<ChDriver> driver;// Create the vehicle Irrlicht interfaceauto vis_irr = chrono_types::make_shared<ChWheeledVehicleVisualSystemIrrlicht>(); //~ ChWheeled这个类继承了可视化的基类vis_irr->SetWindowTitle("HMMWV Demo");vis_irr->SetChaseCamera({ 0.0, 0.0, 1.75 }, 6.0, 0.5); // 将可视化的“相机位置”和车底盘上一点绑定。vis_irr->Initialize();vis_irr->AddLightDirectional();vis_irr->AddSkyBox();vis_irr->AddLogo();vis_irr->AttachVehicle(&hmmwv.GetVehicle()); // 将可视化与vehicle绑定// Create the interactive Irrlicht driver system 自定义每次按键的增量auto driver_irr = chrono_types::make_shared<ChInteractiveDriverIRR>(*vis_irr);driver_irr->SetSteeringDelta(render_step_size / steering_time);driver_irr->SetThrottleDelta(render_step_size / throttle_time);driver_irr->SetBrakingDelta(render_step_size / braking_time);driver_irr->Initialize();vis = vis_irr;driver = driver_irr;// ---------------// Simulation loop// ---------------// Number of simulation steps between miscellaneous eventsint render_steps = (int)std::ceil(render_step_size / step_size);// Initialize simulation frame countersint step_number = 0;int render_frame = 0;hmmwv.GetVehicle().EnableRealtime(true);while (vis->Run()) {double time = hmmwv.GetSystem()->GetChTime();// End simulationif (time >= t_end)break;// Render scene and output post-processing dataif (step_number % render_steps == 0) {vis->BeginScene();vis->Render();vis->EndScene();render_frame++;}// Driver inputsDriverInputs driver_inputs = driver->GetInputs();// Update modules (process inputs from other modules)driver->Synchronize(time);terrain.Synchronize(time);hmmwv.Synchronize(time, driver_inputs, terrain);vis->Synchronize(time, driver_inputs);// Advance simulation for one timestep for all modulesdriver->Advance(step_size);terrain.Advance(step_size);hmmwv.Advance(step_size);vis->Advance(step_size); //~ 更新vis的trackpoint等。// Increment frame numberstep_number++;std::cout << "Step: " << step_number << std::endl;}return 0;}
}
运行这个例子,就可以用WASD控制悍马车在自定义的一个地形上开动了。
相关文章:
【Chrono Engine学习总结】4-vehicle-4.1-vehicle的基本概念
由于Chrono的官方教程在一些细节方面解释的并不清楚,自己做了一些尝试,做学习总结。 1、基本介绍 Vehicle Overview Vehicle Mannel Vehicle的官方demo 1.1 Vehicle的构型 一个车辆由许多子系统构成:悬挂、转向、轮子/履带、刹车/油门、动…...

腾讯云4核8G服务器多少钱?2024精准报价
腾讯云4核8G服务器S5和轻量应用服务器优惠价格表,轻量应用服务器和CVM云服务器均有活动,云服务器CVM标准型S5实例4核8G配置价格15个月1437.3元,5年6490.44元,标准型SA2服务器1444.8元一年,轻量应用服务器4核8G12M带宽一…...
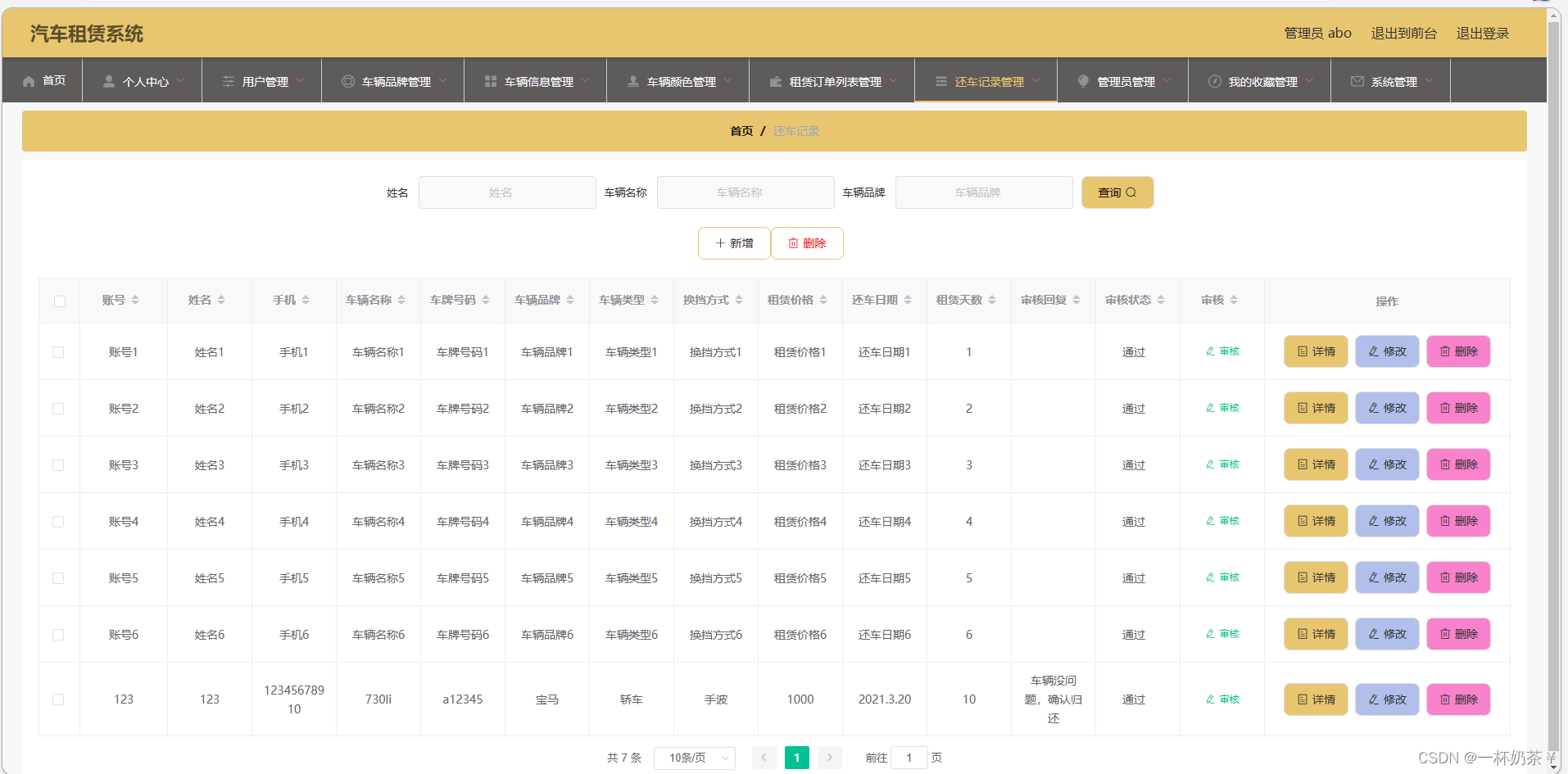
汽车出租管理系统
文章目录 汽车出租管理系统一、系统演示二、项目介绍三、系统部分功能截图四、部分代码展示五、底部获取项目源码(9.9¥带走) 汽车出租管理系统 一、系统演示 汽车租赁系统 二、项目介绍 语言:java 框架:SpringBoot、…...
使用SM4国密加密算法对Spring Boot项目数据库连接信息以及yaml文件配置属性进行加密配置(读取时自动解密)
一、前言 在业务系统开发过程中,我们必不可少的会使用数据库,在应用开发过程中,数据库连接信息往往都是以明文的方式配置到yaml配置文件中的,这样有密码泄露的风险,那么有没有什么方式可以避免呢?方案当然是有的,就是对数据库密码配置的时候进行加密,然后读取的时候再…...
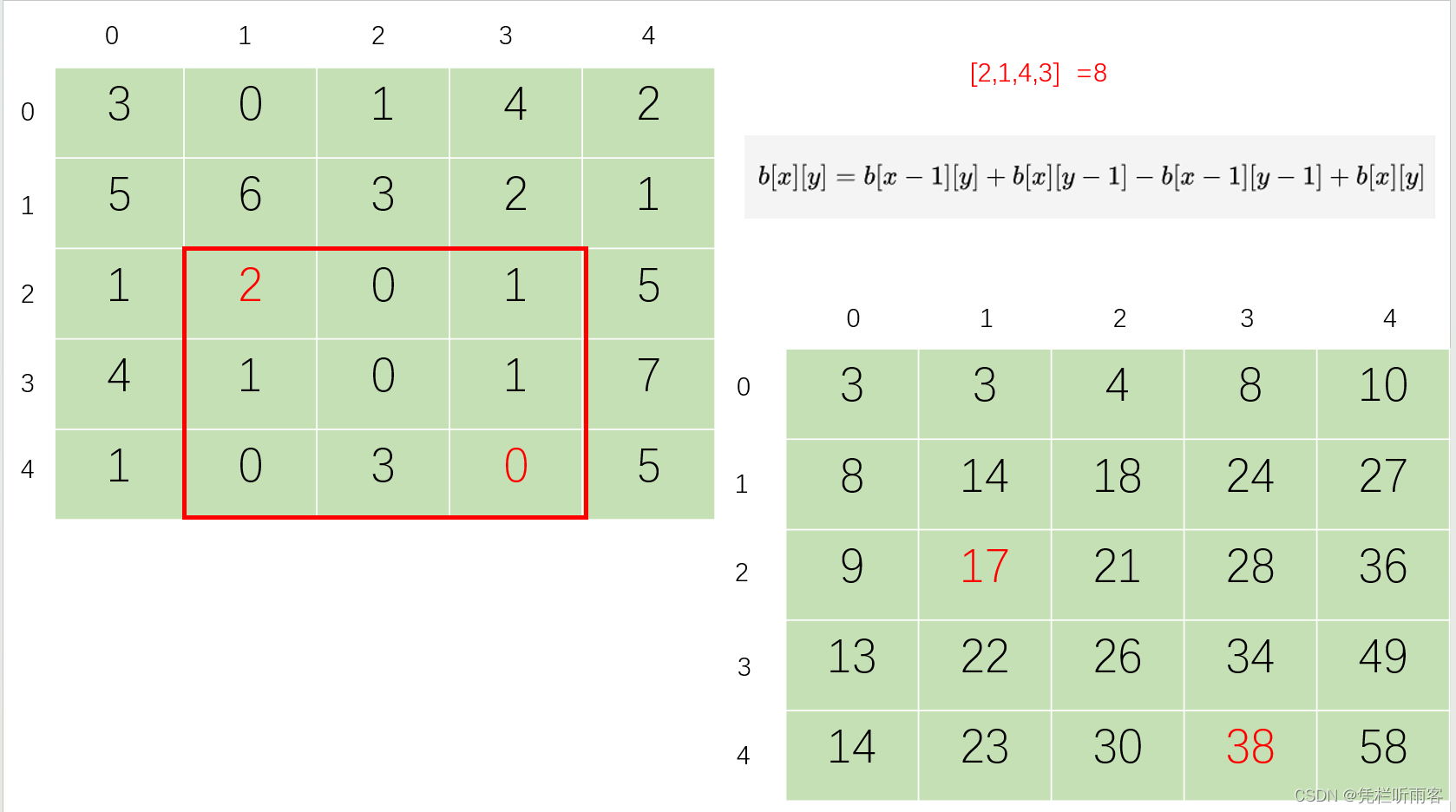
【LeetCode每日一题】二维前缀和基本概念与案例
二维前缀和 根据某个块块 的 左上角坐标,和右下角坐标 求出 块块的累加和。 304. 二维区域和检索 - 矩阵不可变 /*** param {number[][]} matrix*/ var NumMatrix function(matrix) {let row matrix.length;let col matrix[0].length;// 初始化一个二维数组&am…...

计算机网络——网络安全
计算机网络——网络安全 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家, [跳转到网站](https://www.captainbed.cn/qianqiu) 小程一言专栏链接: [link](http://t.csdnimg.cn/ZUTXU) 网络安全何…...

SQl 注入 - 利用报错函数updatexml及extracevalue
环境准备:构建完善的安全渗透测试环境:推荐工具、资源和下载链接_渗透测试靶机下载-CSDN博客 一、updatexml() 函数 1. 使用前提: 在 MySQL 高版本中(大于5.1版本)添加了对 XML 文档进行查询和修改的函数,包括 updatexml() 和 extractvalue()。 2. 显示错误处理: 在…...
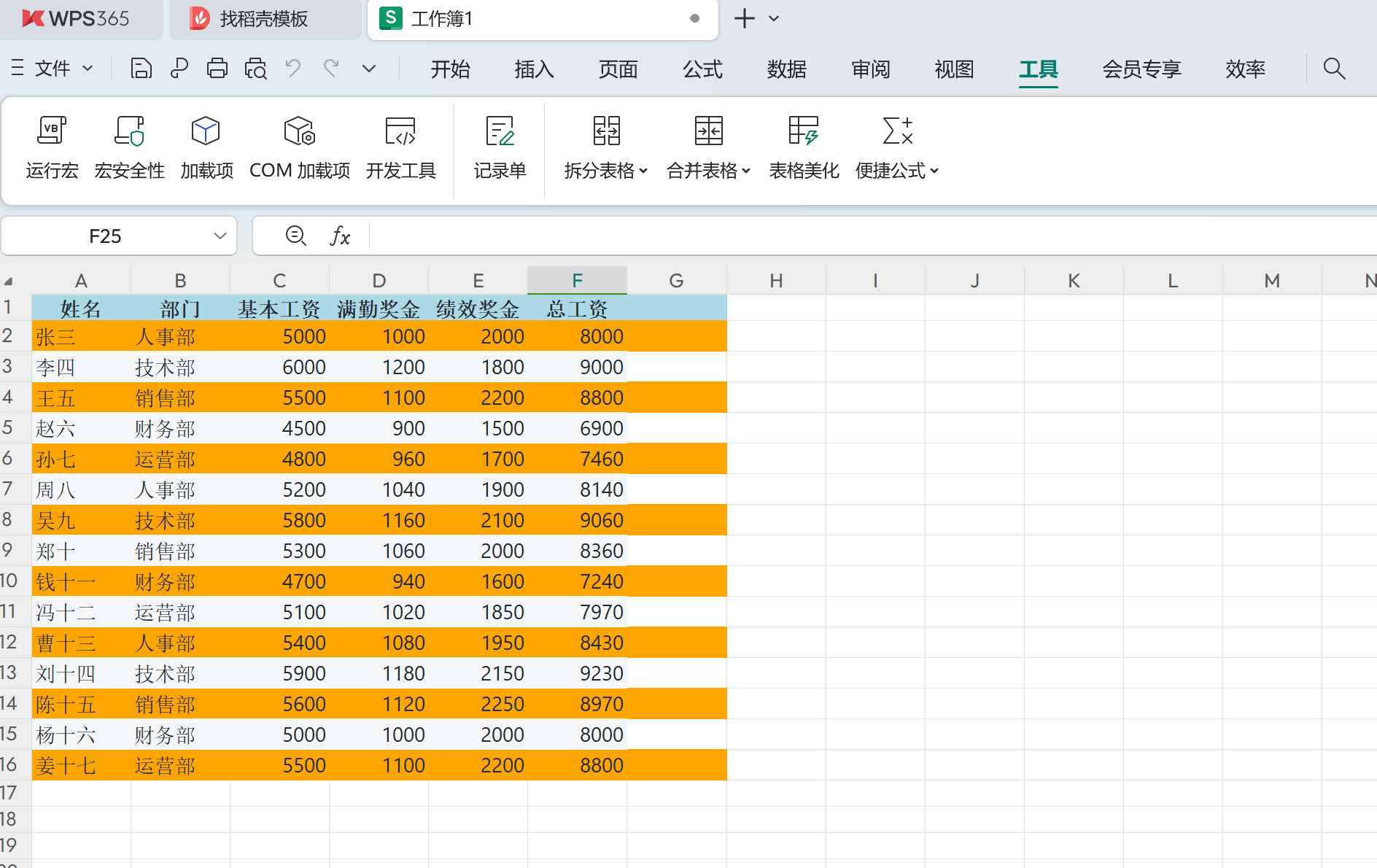
ChatGPT高效提问—prompt实践(生成VBA)
ChatGPT高效提问—prompt实践(生成VBA) 2. 生成VBA函数操作Excel 当前Excel表格数据无背景颜色,区分不明显。假如我们想美化数据展示效果,把标题行设置为浅蓝色,其余奇数行设置为橙色,该怎么操作呢?这次我们基于ChatGPT写一个prompt来创建VBA函数。 输入prompt…...

Ps:直接从图层生成文件(图像资源)
通过Ps菜单:文件/导出/将图层导出到文件 Layers to Files命令,我们可以快速地将当前文档中的每个图层导出为同一类型、相同大小和选项的独立文件。 Photoshop 还提供了一个功能,可以基于文档中的图层或图层组的名称,自动生成指定大…...

springboot-接入ai机器人 汇总
鱼聪明 Java SDKGitHub - liyupi/yucongming-java-sdk: 鱼聪明 AI 的 Java SDK,几行代码使用 AI 助手能力!...
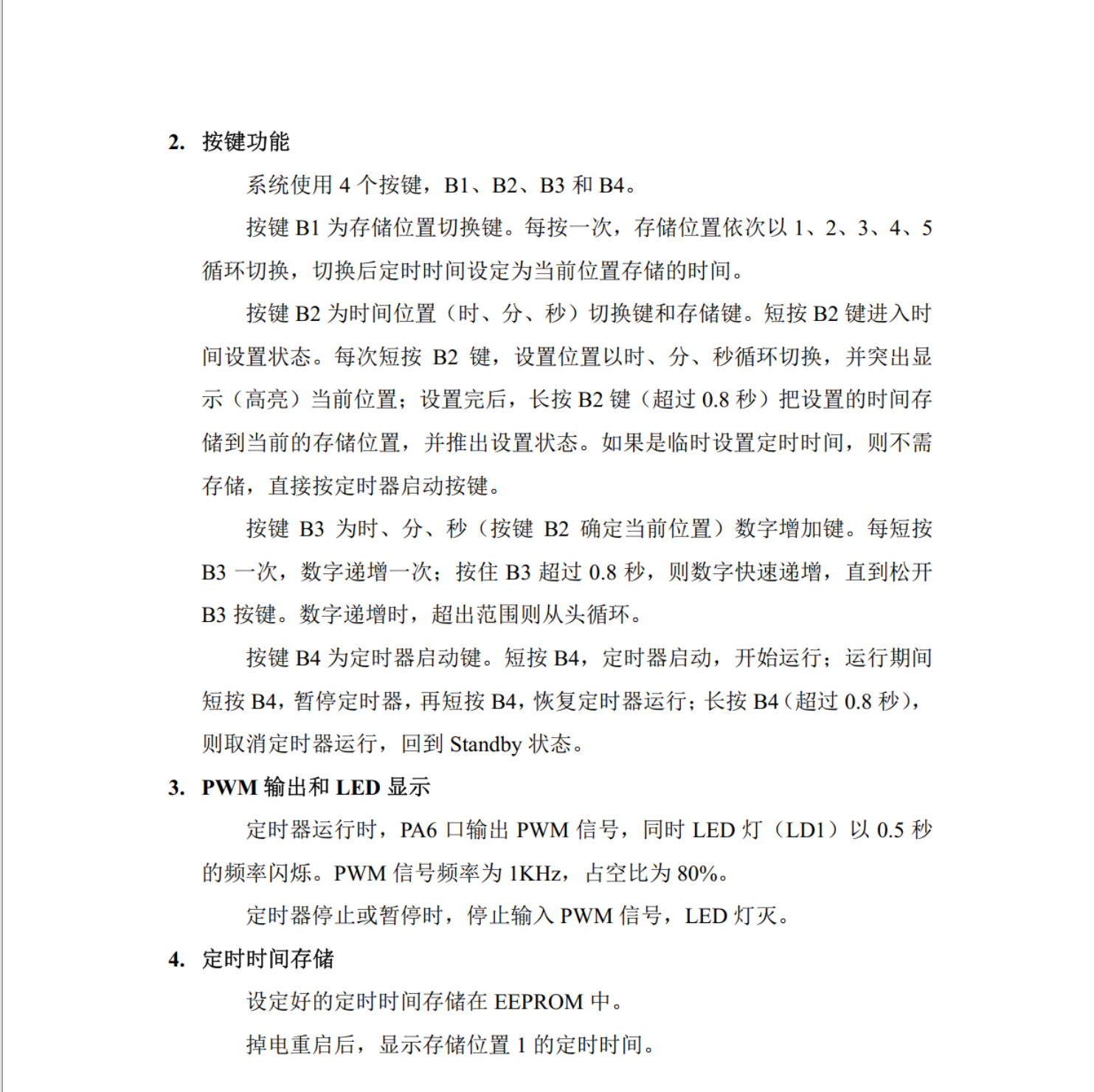
蓝桥杯嵌入式第9届真题(完成) STM32G431
蓝桥杯嵌入式第9届真题(完成) STM32G431 题目 分析和代码 main.h /* USER CODE BEGIN Header */ /********************************************************************************* file : main.h* brief : Header for main.c file.* …...
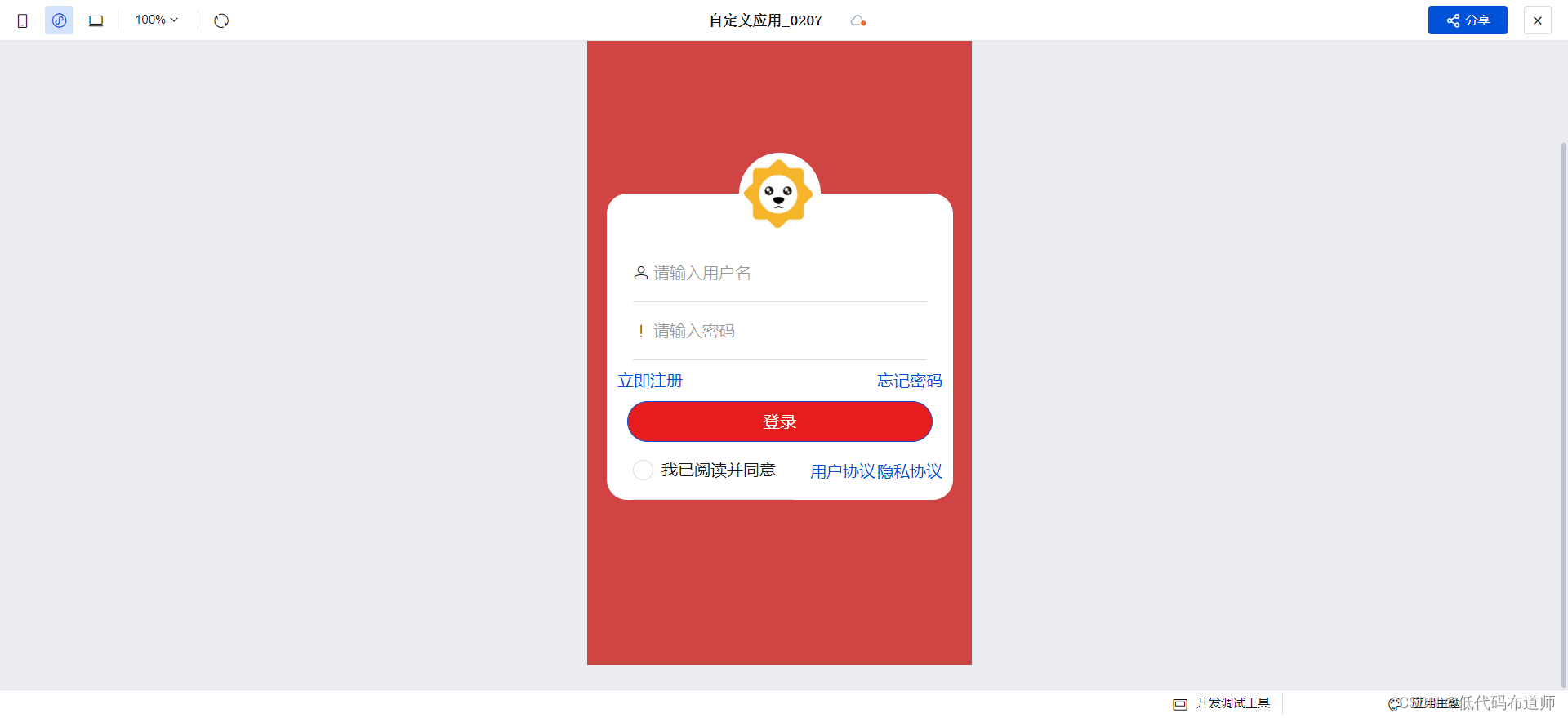
电商小程序03登录页面开发
目录 1 创建应用2 创建页面3 首页功能搭建4 登录页搭建5 设置叠加效果总结 小程序开发在经过需求分析和数据源设计之后,就可以进入到页面开发的阶段了。首先我们需要开发登录的功能。 登录功能要求用户输入用户名和密码,勾选同意用户协议和隐私协议&…...

聊聊PowerJob的CleanService
序 本文主要研究一下PowerJob的CleanService CleanService Slf4j Service public class CleanService {private final DFsService dFsService;private final InstanceInfoRepository instanceInfoRepository;private final WorkflowInstanceInfoRepository workflowInstance…...

Qt QML学习(一):Qt Quick 与 QML 简介
参考引用 QML和Qt Quick快速入门全面认识 Qt Widgets、QML、Qt Quick 1. Qt Widgets、QML、Qt Quick 区别 1.1 QML 和 Qt Quick 是什么关系? 1.1.1 从概念上区分 QML 是一种用户界面规范和标记语言,它允许开发人员创建高性能、流畅的动画和具有视觉吸引…...

Kylin系统下Qt的各种中文问题解决思路
一、编译生成的程序运行,中文乱码 这个比较简单。 Windows下基本就是编码格式设置。ini中文问题,见QSettings读取ini中文key方法。 其他Linux版本没玩过,不清楚。Kylin系统下基本就是缺中文的字库。找个好的中文字库,放到目录下即可,系统目录/usr/lib/fonts,qt的安装目…...

C 练习实例69-约瑟夫环
题目:有n个人围成一圈,顺序排号。从第一个人开始报数(从1到3报数),凡报到3的人退出圈子,问最后留下的是原来第几号的那位。 代码: #include <stdio.h> int main() {int n8;int table[n]…...
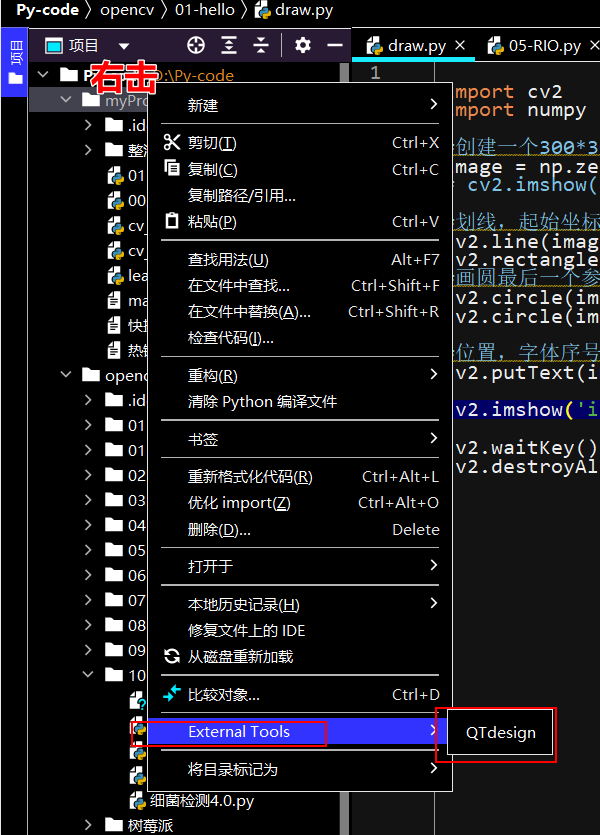
【Qt Design】界面介绍
文章目录 前言Widget Box(工具箱)对象查看器Qt Design属性编译器sizePolicy内容 信号/槽编辑器资源浏览器ui文件编辑完窗口后查看代码在Pycharm中添加QtDesign 前言 Widget Box(工具箱) 提供很多控件 对象查看器 对象查看区域…...
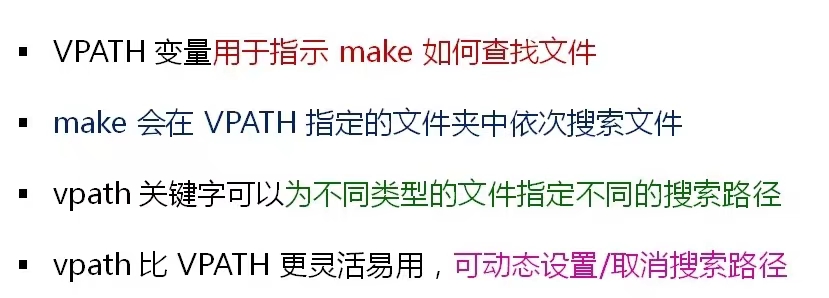
Makefile编译原理 make 中的路径搜索_1
一.make中的路径搜索 问题:在实际的工程项目中,所有的源文件和头文件都放在同一个文件夹中吗? 实验1 : VPATH 引子 mhrubuntu:~/work/makefile1/17$ ll total 28 drwxrwxr-x 4 mhr mhr 4096 Apr 22 00:46 ./ drwxrwxr-x 7 mhr m…...
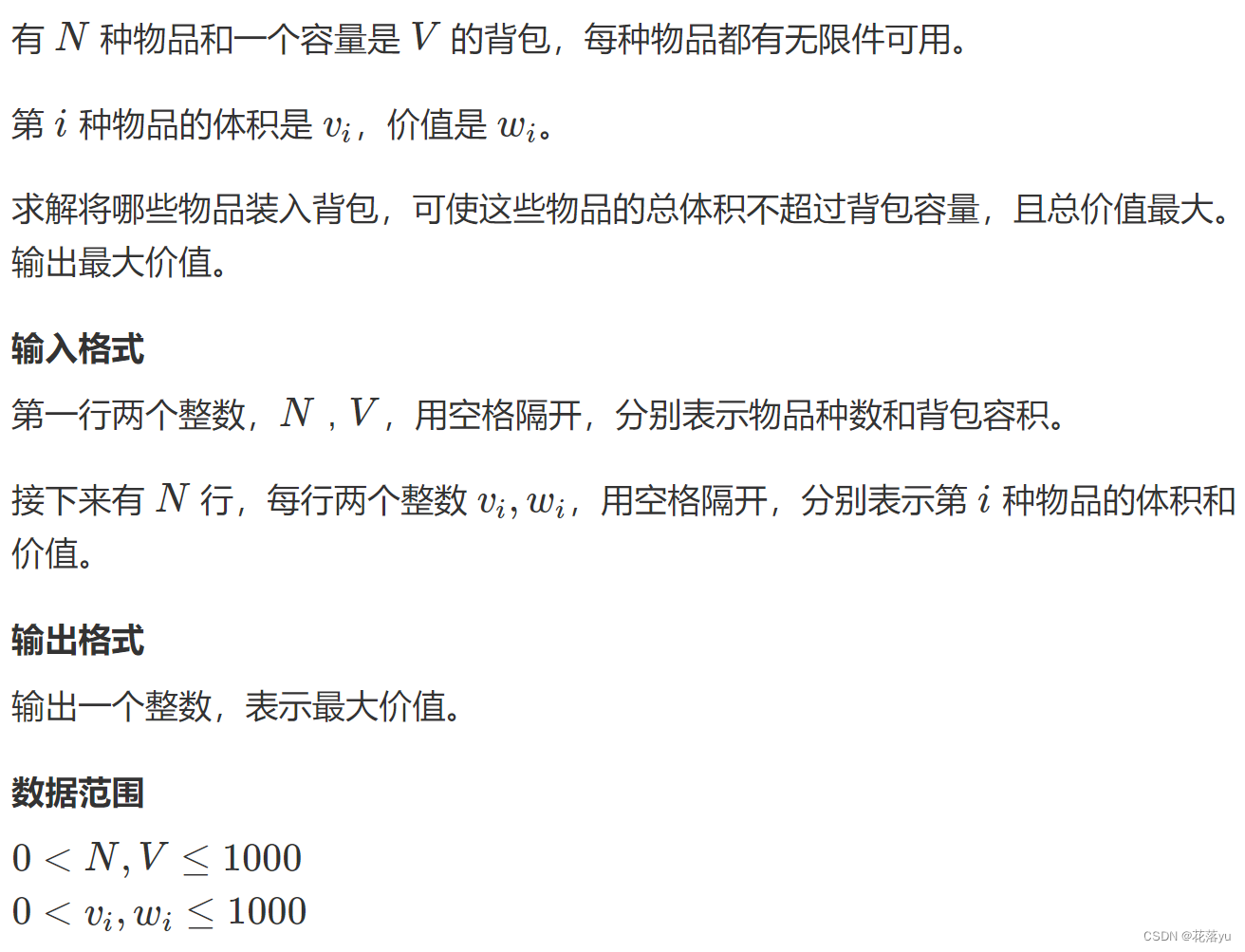
蓝桥杯每日一题------背包问题(一)
点击可观看配套视频讲解 背包问题 阅读小提示:这篇文章稍微有点长,希望可以对背包问题进行系统详细的讲解,在看的过程中如果有任何疑问请在评论区里指出。因为篇幅过长也可以进行选择性阅读,读取自己想要的那一部分即可。 前言…...

面试 JavaScript 框架八股文十问十答第八期
面试 JavaScript 框架八股文十问十答第八期 作者:程序员小白条,个人博客 相信看了本文后,对你的面试是有一定帮助的!关注专栏后就能收到持续更新! ⭐点赞⭐收藏⭐不迷路!⭐ 1)实现call、apply…...

Performance-Fish:深度解析《环世界》400%性能优化核心技术
Performance-Fish:深度解析《环世界》400%性能优化核心技术 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish Performance-Fish 是专为《环世界》(RimWorld&#…...

完整实战指南:使用N_m3u8DL-RE高效解决流媒体下载难题
完整实战指南:使用N_m3u8DL-RE高效解决流媒体下载难题 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3/N_m3u8DL-RE …...

ViGEmBus终极指南:Windows游戏手柄模拟驱动的完整解决方案
ViGEmBus终极指南:Windows游戏手柄模拟驱动的完整解决方案 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 你是否曾经遇到过这样的情况ÿ…...

Sketchfab数据提取终极指南:打破在线3D模型下载壁垒的完整解决方案
Sketchfab数据提取终极指南:打破在线3D模型下载壁垒的完整解决方案 【免费下载链接】sketchfab sketchfab download userscipt for Tampermonkey by firefox only 项目地址: https://gitcode.com/gh_mirrors/sk/sketchfab 你是否曾在Sketchfab上发现完美的3D…...

C语言结构体、枚举、联合体:从内存布局看区别,新手避坑指南
C语言结构体、枚举、联合体:从内存布局看区别,新手避坑指南 在C语言开发中,结构体、枚举和联合体是构建复杂数据模型的三大基石。但很多开发者在实际项目中常遇到这样的困惑:为什么结构体占用的内存比预期大?枚举变量在…...

零基础实操:小龙虾 AI OpenClaw 接入 Kimi 详细步骤
前置准备 获取小龙虾open claw一键安装包(www.totom.top)并安装电脑端已成功安装并正常运行OpenClaw客户端,顶部 Gateway 状态保持在线设备网络通畅,可正常访问 Kimi 开放平台拥有可正常登录的 Kimi 月之暗面 Moonshot 账号账号提…...

Navis:开源项目标准化开发环境与工具链配置框架实践
1. 项目概述:一个为开发者打造的“导航星图”如果你和我一样,常年混迹在开源项目的海洋里,那么你一定对这种感觉不陌生:面对一个全新的、功能强大的开源工具,兴奋地克隆了仓库,然后……就卡在了第一步。REA…...

【STC8H】GPIO模式深度解析:从准双向到推挽,如何精准控制外设
1. STC8H的GPIO模式全景解析 第一次接触STC8H的GPIO配置时,我被那个神秘的PxM0和PxM1寄存器搞得晕头转向。直到有一次调试I2C通讯失败,才发现是开漏模式配置错误。这次教训让我明白,理解GPIO的四种工作模式,就像掌握不同武器的使用…...
架构与实现)
基于RAG与向量数据库的智能信息管理系统(IIMS)架构与实现
1. 项目概述:当AI成为你的“第二大脑”最近在折腾一个挺有意思的项目,叫“IIMS-By-AI”。乍一看这个标题,可能有点摸不着头脑,但拆解一下就能明白它的野心:IntelligentInformationManagementSystem, By AI。…...

避坑指南:uniapp在微信小程序中调用相机和人脸识别的权限与兼容性问题
Uniapp微信小程序相机与人脸识别开发避坑指南 微信小程序作为轻量级应用平台,其相机与人脸识别功能在金融、社交、教育等领域应用广泛。然而,当开发者使用Uniapp这一跨平台框架进行微信小程序开发时,往往会遇到各种兼容性和权限问题。本文将深…...