蓝桥杯嵌入式第11届真题(完成) STM32G431
蓝桥杯嵌入式第11届真题(完成) STM32G431
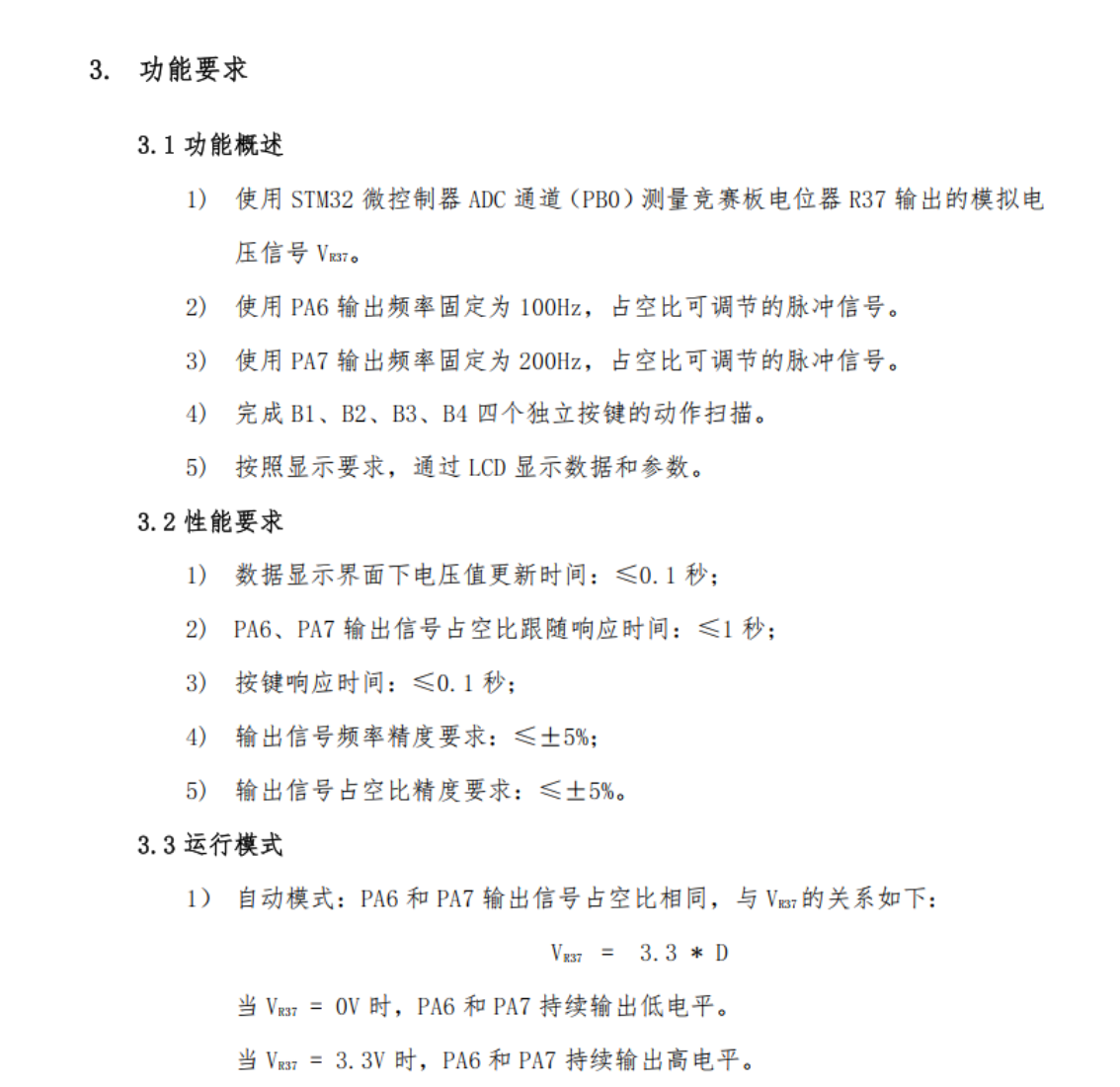
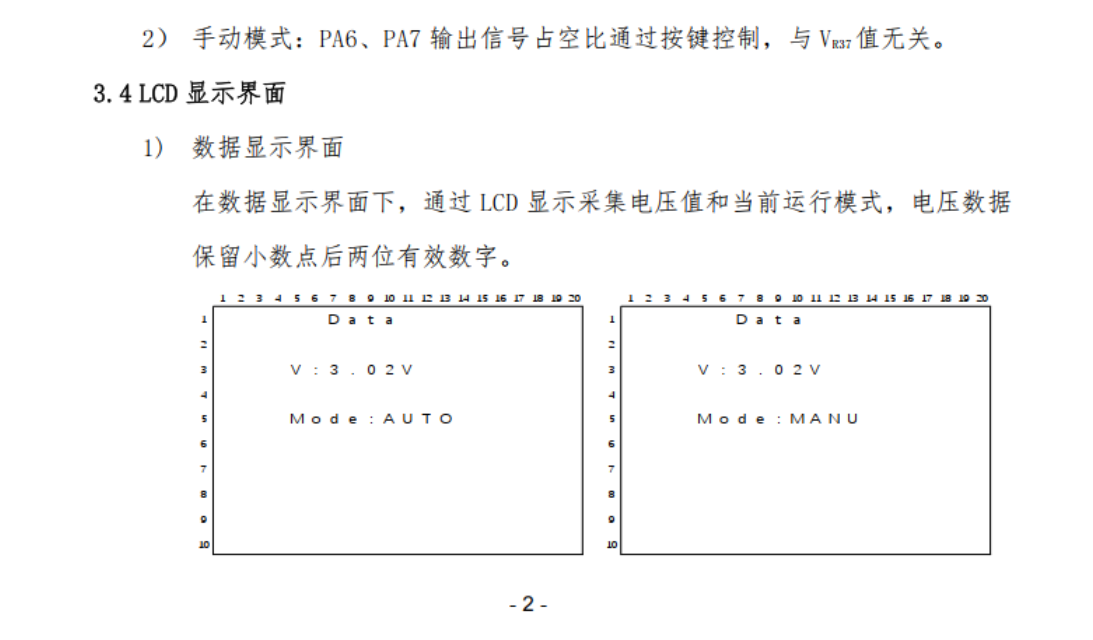
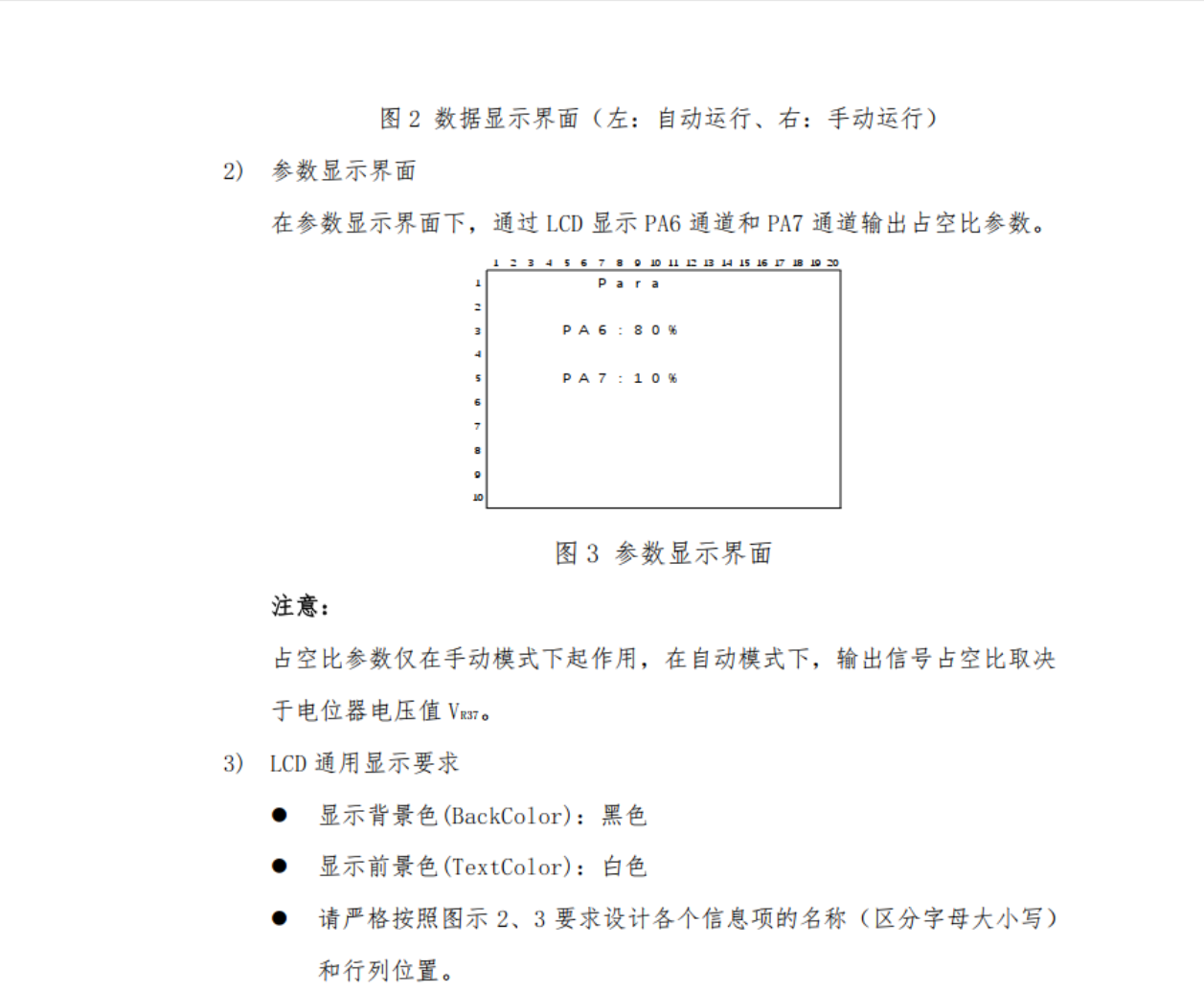
题目
代码
程序和之前的大同小异,不过多解释
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "key.h"
#include "led.h"
#include "myadc.h"
#include "stdbool.h"
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern struct Key key[4];
uint8_t view = 1;
uint8_t lcdtext[30];
float adcVal;
uint8_t model[10] = "AUTO";
uint8_t D1 = 10;
uint8_t D2 = 10;
uint8_t led;
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_process(void);
void lcd_process(void);
void led_process(void);
void adc_process(void);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void lcdclear(void)
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ADC2_Init();MX_TIM3_Init();MX_TIM17_Init();MX_TIM2_Init();/* USER CODE BEGIN 2 */LCD_Init();HAL_TIM_Base_Start_IT(&htim2);HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */lcdclear();led_display(0x00);while (1){adc_process();key_process();lcd_process();led_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */void key_process(void)
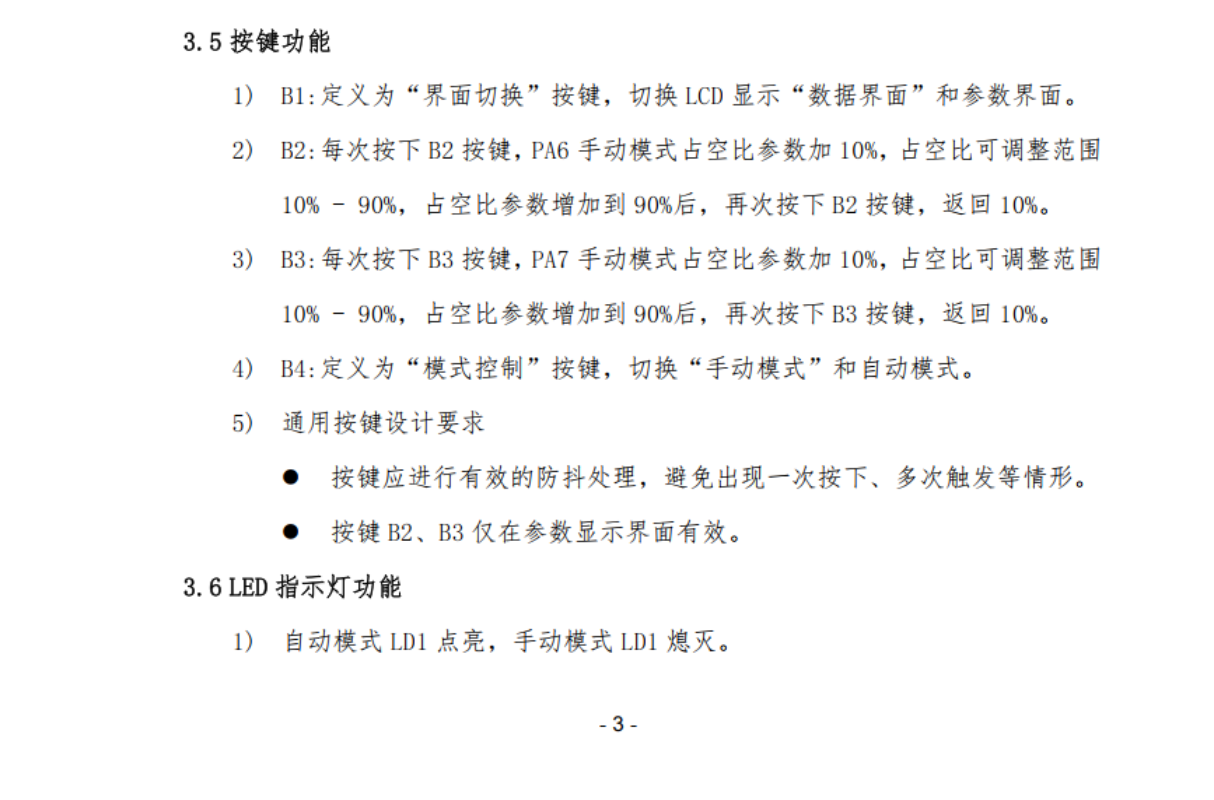
{if(key[0].key_single_flag){lcdclear();key[0].key_single_flag = 0;if(view==1){view = 2;}else{view = 1;}}if(key[1].key_single_flag){lcdclear();key[1].key_single_flag = 0;D1 = ((D1 / 10) % 9 + 1) * 10;}if(key[2].key_single_flag){lcdclear();key[2].key_single_flag = 0;D2 = ((D2 / 10) % 9 + 1) * 10;}if(key[3].key_single_flag){lcdclear();key[3].key_single_flag = 0;if(strcmp((char *)model,"AUTO")==0){sprintf((char *)model,"MANU");}else{sprintf((char *)model,"AUTO");}}} void lcd_process(void)
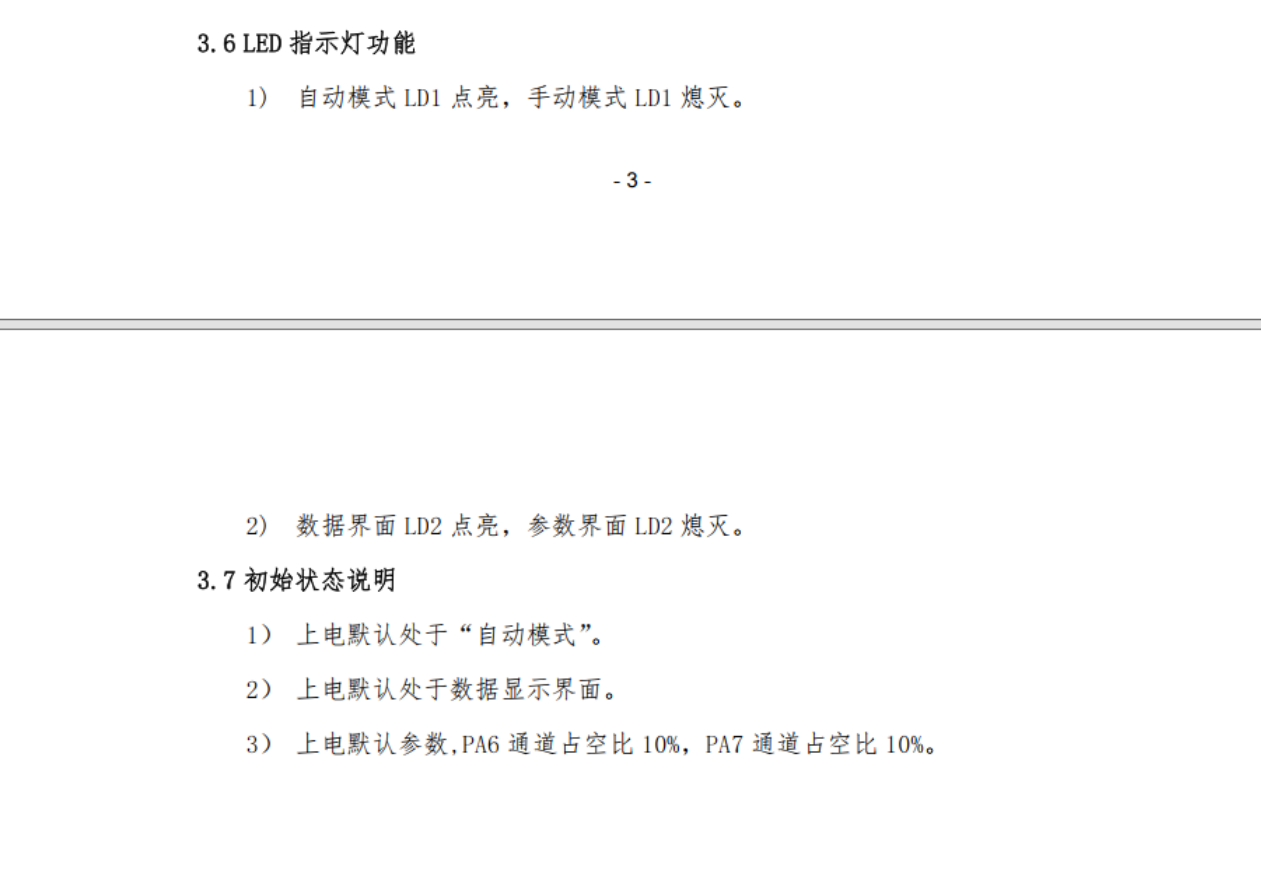
{switch(view){case 1://数据显示界面{sprintf((char *)lcdtext," Data");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," V:%.2fV",adcVal);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," Mode:%s",model);LCD_DisplayStringLine(Line4,lcdtext);}break;case 2://参数设置界面{sprintf((char *)lcdtext," Para");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," PA6:%d %%",D1);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," PA7:%d %%",D2);LCD_DisplayStringLine(Line4,lcdtext);}break;}}
void led_process(void)
{if(strcmp((char *)model,"AUTO")==0){led|=0x01;}else{led&=~0x01;}if(view==1){led|=0x02;}else{led&=~0x02;}led_display(led);
}
void adc_process(void)
{adcVal = get_Adc_Val(&hadc2);if(strcmp((char *)model,"AUTO")==0){D1 = adcVal*100 /3.3f;D2 = D1;if(adcVal==0){D1 = 0;D2 = D1;}else if(adcVal==3.3){D1 = 100;D2 = D1;} }__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,10000*D1);__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,10000*D2);}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/key.c
#include "key.h"struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch(key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_single_flag = 1;key[i].key_status = 2;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_status = 0;}}break;}}}
}led.c
#include "led.h"void led_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
myadc.c
#include "myadc.h"float get_Adc_Val(ADC_HandleTypeDef *hadc)
{float val;HAL_ADC_Start(hadc);val = HAL_ADC_GetValue(hadc);return val*3.3f/4096;
}
相关文章:
蓝桥杯嵌入式第11届真题(完成) STM32G431
蓝桥杯嵌入式第11届真题(完成) STM32G431 题目 代码 程序和之前的大同小异,不过多解释 main.c /* USER CODE BEGIN Header */ /********************************************************************************* file : main.c* brief :…...
ChatGPT高效提问—prompt实践(教师助手)
ChatGPT高效提问—prompt实践(教师助手) 下面来看看ChatGPT在教育领域有什么用途。 首先设定ChatGPT的角色为高中教师助手。 输入prompt: ChatGPT输出: 教师助手的角色已经设置完成。下面通过几种不同的情景演示如何使用。 1.1.1 制定…...

AI绘画作品的展示和变现-2
4.7 制作红包封面 中国的节日和传统文化元素仍然可以成为创作者们的创作灵感,创造出更多的变现机会。比如元宵节,可以制作大型元宵图案,进行引流并卖出元宵。 而春分、谷雨等节气也可以成为创作的灵感来源,创作出与之相关的图案&…...
Linux---网络套接字
端口号 端口号 端口号是一个2字节16位的整数; 端口号用来标识一个进程, 告诉操作系统, 当前的这个数据要交给哪一个进程来处理; IP地址 端口号能够标识网络上的某一台主机的某一个进程; 一个端口号只能被一个进程占用 在公网上,IP地址能表示唯一的一台主机&…...

前端vue 数字 字符串 丢失精度问题
1.问题 后端返回的数据 是这样的 一个字符串类型的数据 前端要想显示这个 肯定需要使用Json.parse() 转换一下 但是 目前有一个问题 转换的确可以 showId:1206381711026823172 有一个这样的字段 转换了以后 发现 字段成了1206381711026823200 精度直接丢了 原本的数据…...
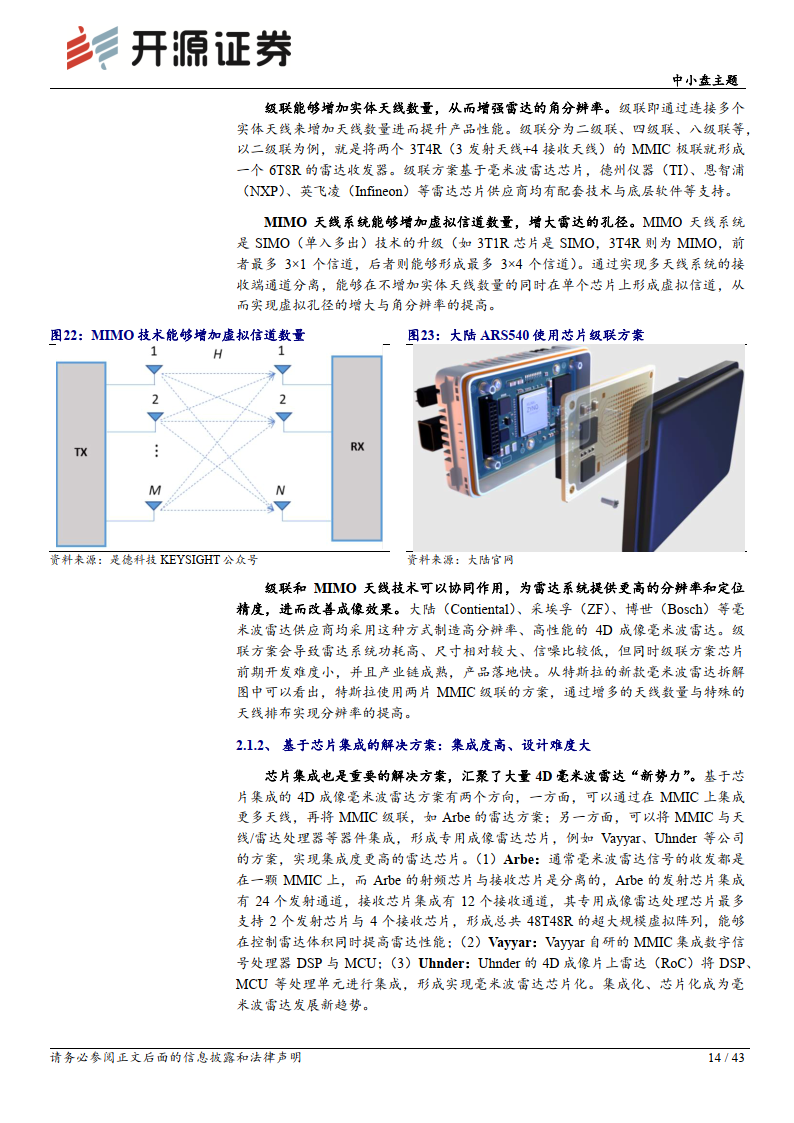
智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。 (报告出品方:开源证券) 报告共计:43页 视觉感知最佳辅助——4D 成像毫米波雷达 感知是自动…...

docker 3.1 镜像
docker 3.1 镜像命令 拉取镜像 docker pull debian #从 Docker Hub 拉取名为 debian 的镜像docker pull hello-world #从 Docker Hub 拉入名为 hello-world 的镜像 运行镜像/容器 docker run hello-world 查看本地所有的镜像 docker images 容器生成镜像…...
如何在极低成本硬件上落地人工智能算法 —— 分布式AI
一、背景 分布式AI的发展前景非常广阔,随着5G、6G等高速网络通信技术的普及和边缘计算能力的提升,以及AI算法和硬件的不断优化进步,分布式AI将在多个领域展现出强大的应用潜力和市场价值: 1. **物联网(IoT࿰…...
机器学习:ROC曲线笔记
ROC曲线(Receiver Operating Characteristic Curve)是一种用于评估二分类模型性能的图形化工具,主要用于展示在不同阈值(Threshold)下模型的真阳性率(True Positive Rate,TPR)和假阳…...
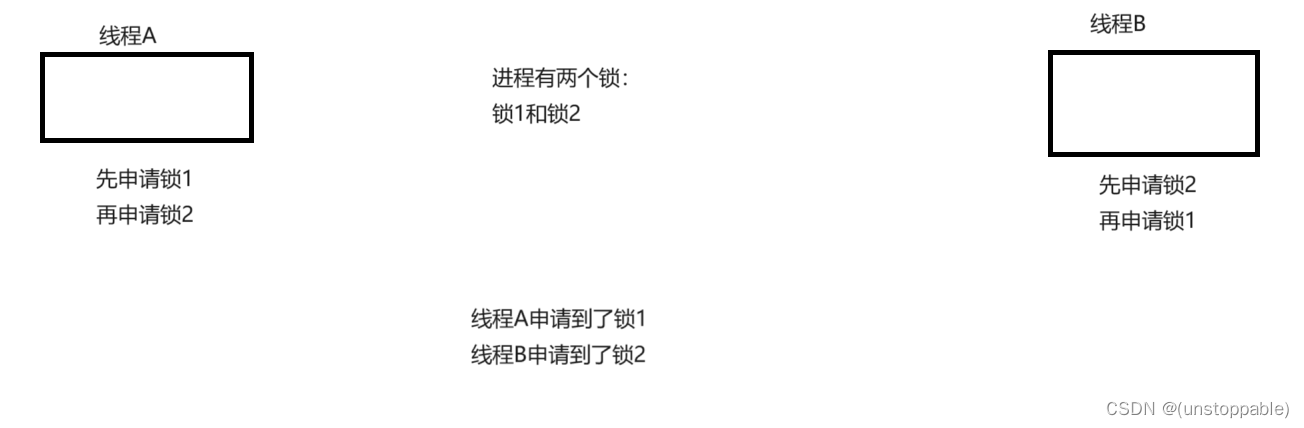
【lesson54】线程互斥
文章目录 线程互斥 线程互斥 互斥量mutex 大部分情况,线程使用的数据都是局部变量,变量的地址空间在线程栈空间内,这种情况,变量归属单个线程,其他线程无法获得这种变量。但有时候,很多变量都需要在线程间…...

Android14音频进阶:MediaPlayerService如何启动AudioTrack 上篇(五十五)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒体系统工程师系列【原创干货持续更新中……】🚀 人生格言: 人生从来没有捷径,只…...
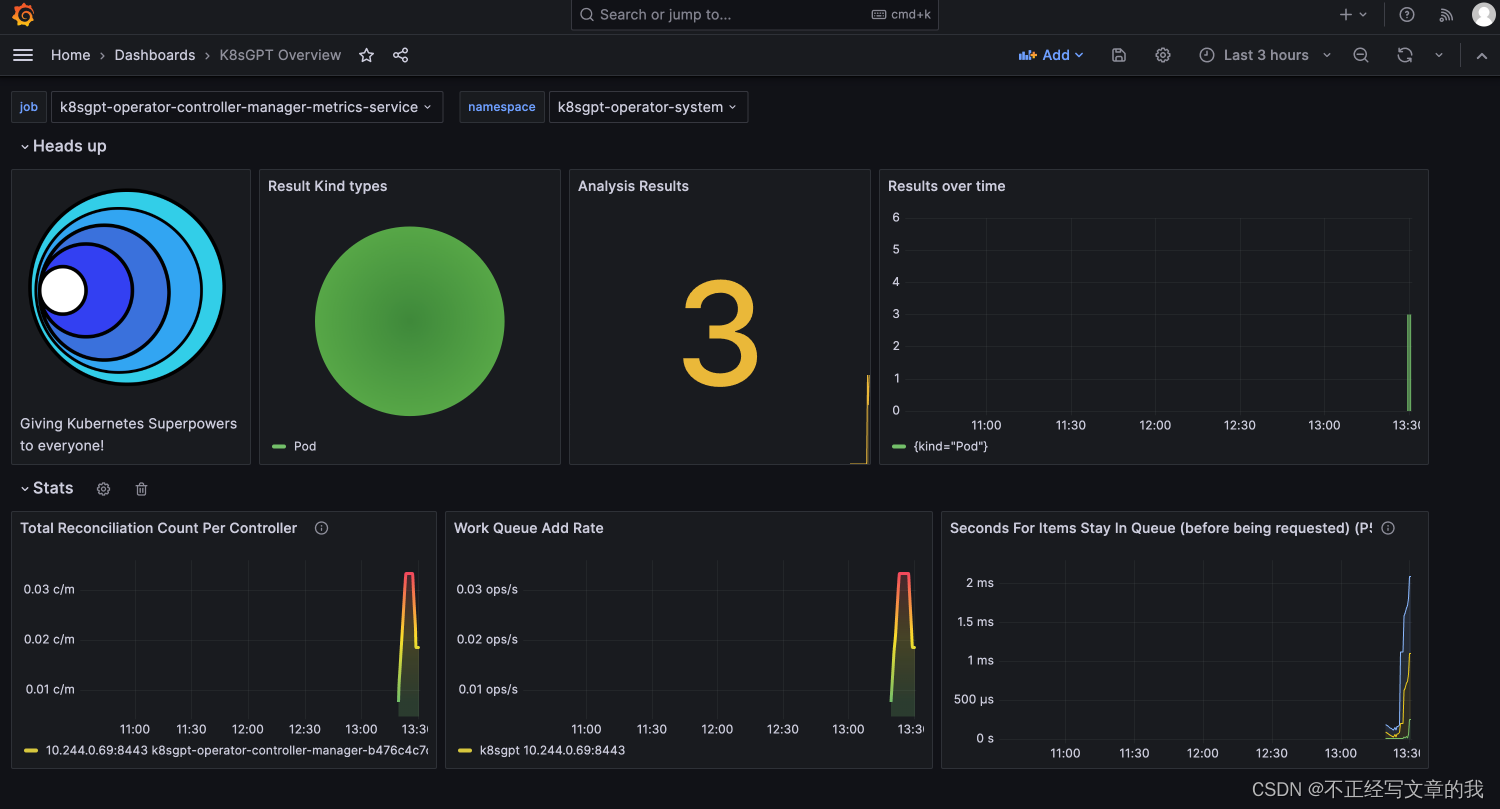
K8sGPT 的使用
K8sGPT 介绍 k8sgpt 是一个扫描 Kubernetes 集群、诊断和分类问题的工具。它将 SRE 经验编入其分析器中,并帮助提取最相关的信息,通过人工智能来丰富它。它还可以与 OpenAI、Azure、Cohere、Amazon Bedrock 和本地模型结合使用。 K8sGPT Github 地址 …...

《CSS 简易速速上手小册》第4章:视觉美学(2024 最新版)
文章目录 4.1 颜色理论在 CSS 设计中的应用:网页的调色盘4.1.1 基础知识4.1.2 重点案例:创建一个具有情感设计的登录页面4.1.3 拓展案例 1:使用颜色增强信息的可视化表示4.1.4 拓展案例 2:利用颜色创建网站的品牌身份 4.2 字体与文…...

设计模式浅析
一、设计模式的使用场景 设计模式(Design Patterns)是在软件开发中经过验证的最佳实践,用于解决常见的设计问题。它们提供了一种可复用的解决方案,可以帮助开发人员提高代码质量、可维护性和可重用性。设计模式的采用通常在以下情…...
Linux环境中的git
目录 1.要使用git,首先要安装git 2.首次使用git需要做的操作 3.git操作 1.要使用git,首先要安装git 指令:sudo yum install -y git 2.首次使用git需要做的操作 在gitee网页,在你的仓库中找到: 先将下面两行代码分别…...
单测的思路
文章目录 单测的定义方法的单测几种生成工具的对比生成步骤 接口的单测场景的单测总结参考 单测的定义 单元测试(Unit Testing)是一种软件开发中的测试方法,它的主要目的是确保软件中的最小可测试单元(通常是函数、方法或类&…...
Linux内核与驱动面试经典“小”问题集锦(6)
接前一篇文章:Linux内核与驱动面试经典“小”问题集锦(5) 问题8 问:如何判断一个数是否是2的幂次(假设最多32位)? 备注:此问题是笔者年前参加小米面试时遇到的一个问题,…...
-钉钉告警企业微信配置)
【zabbix】(四)-钉钉告警企业微信配置
前提条件: 已经安装了Python3环境(脚本需要requests模块)。Centos7.x自带Python2(不含requests模块) 钉钉告警配置 一 安装Python3 参考该优秀文档部署 查看Python的模块:pip list / pip3 list 报错 …...
python-自动化篇-办公-一键将word中的表格提取到excel文件中
文章目录 代码 工作中,经常需要将Word文档中的表格粘贴到Excel文件中,以便汇总及分析。一个一个复制粘贴,非常不方便,还是Python自动化操作,省心省力。要求如下图所示,即将word中的所有表格,转存…...
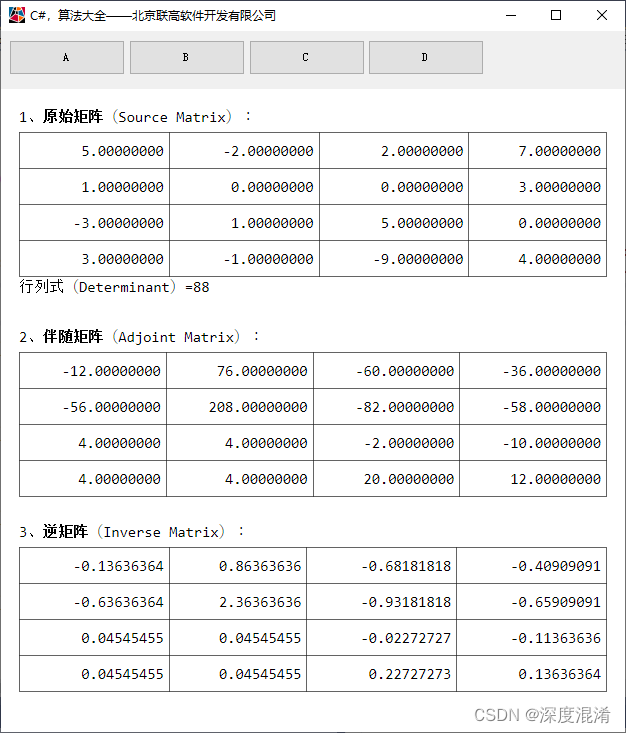
C#,数值计算,矩阵的行列式(Determinant)、伴随矩阵(Adjoint)与逆矩阵(Inverse)的算法与源代码
本文发布矩阵(Matrix)的一些初级算法。 一、矩阵的行列式(Determinant) 矩阵行列式是指矩阵的全部元素构成的行列式,设A(a)是数域P上的一个n阶矩阵,则所有A(a)中的元素组成的行列式称为矩阵A的行列式&…...

3个步骤,在VSCode中实现Mermaid图表实时预览的终极工作流
3个步骤,在VSCode中实现Mermaid图表实时预览的终极工作流 【免费下载链接】vscode-mermaid-preview Previews Mermaid diagrams 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-mermaid-preview 你是否曾在编写技术文档时,为了一个简单的流…...
)
保姆级教程:在VMware上安装BCLinux for Euler 21.10最小化系统(附镜像校验与网络配置)
虚拟化环境实战:BCLinux for Euler 21.10最小化系统部署全指南 在云计算和容器化技术盛行的今天,本地虚拟化环境仍然是开发者进行系统测试、软件验证的重要工具。BCLinux for Euler作为一款针对企业级场景优化的Linux发行版,其21.10版本在性能…...

从CentOS 7/8老用户视角:快速上手CentOS 9 Stream的3个界面变化与5个安装配置新坑
从CentOS 7/8老用户视角:快速上手CentOS 9 Stream的3个界面变化与5个安装配置新坑 作为一名长期与CentOS打交道的系统管理员,第一次接触CentOS 9 Stream时,那种"熟悉又陌生"的感觉尤为明显。表面上看,它延续了红帽系一贯…...

不用示波器也能调:在Vivado/Quartus里用时序约束搞定RGMII接口的建立保持时间
不依赖示波器的RGMII时序优化:FPGA工具链实战指南 当千兆以太网接口出现数据丢包或误码时,多数工程师的第一反应是抓起示波器测量信号完整性。但在实际项目周期中,硬件调试设备可能无法随时调用,而PCB设计又已成定局。此时&#x…...

RimSort终极指南:开源跨平台RimWorld模组管理器完全解析
RimSort终极指南:开源跨平台RimWorld模组管理器完全解析 【免费下载链接】RimSort RimSort is an open source mod manager for the video game RimWorld. There is support for Linux, Mac, and Windows, built from the ground up to be a reliable, community-ma…...
)
从AstraPro深度相机到机械臂抓取:ROS2三维手眼标定全流程实战(含D2C配准)
从AstraPro深度相机到机械臂抓取:ROS2三维手眼标定全流程实战 在工业自动化和机器人研究领域,三维手眼标定是实现精准视觉引导操作的核心技术。当我们需要让机械臂在复杂环境中自主完成分拣、装配或检测任务时,如何确保相机"看到"的…...
)
保姆级教程:在Windows上用CMake搞定Qt 6.5与WebRTC M114的集成(附完整代码)
Windows平台Qt 6.5与WebRTC M114深度集成实战指南 环境准备与工具链配置 在Windows平台上进行Qt与WebRTC的集成开发,首先需要搭建完整的工具链环境。不同于简单的库引用,这种深度集成对工具版本和系统配置有着严格要求。 必备组件清单: Visua…...

2026年运动木地板厂家口碑排行榜,谁是真正王者?
随着体育产业的蓬勃发展,运动木地板的需求日益增长。作为体育场馆的重要组成部分,运动木地板的质量直接影响到运动员的表现和观众的体验。那么,在众多运动木地板厂家中,哪家才是真正的王者呢?本文将从产品质量、工艺技…...

百考通AI智能聚类文献,告别碎片化罗列
撰写文献综述,是学术写作中承上启下的关键一步。它不仅要展示你对研究领域的了解程度,更要体现你的归纳能力、批判思维和问题意识。然而,现实中许多学生却因资料庞杂、逻辑混乱或时间不足,难以写出一篇真正“有据、有理、有深度”…...

5分钟搞定多平台直播:OBS-multi-rtmp插件终极指南
5分钟搞定多平台直播:OBS-multi-rtmp插件终极指南 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 还在为不同直播平台重复配置推流参数而烦恼吗?想要一键同步推流…...