Kernelized Correlation Filters KCF算法原理详解(阅读笔记)(待补充)
KCF
目录
- KCF
- 预备知识
- 1. 岭回归
- 2. 循环移位和循环矩阵
- 3. 傅里叶对角化
- 4. 方向梯度直方图(HOG)
- 正文
- 1. 线性回归
- 1.1. 岭回归
- 1.2. 基于循环矩阵获取正负样本
- 1.3. 基于傅里叶对角化的求解
- 2. 使用非线性回归对模型进行训练
- 2.1. 应用kernel-trick的非线性模型的求解结果
- 2.2. 快速核方法
- 2.3. 快速检测
- 3. 快速核相关
- 4. KCF算法流程
- 5. 总结
参考博文:
- 【KCF算法解析】High-Speed Tracking with Kernelized Correlation Filters笔记
- KCF论文理解与源码解析
- KCF算法公式推导
- KCF(High-Speed Tracking with Kernelized Correlation Filters)论文详解
- KCF目标跟踪方法分析与总结
预备知识
1. 岭回归
首先温习一下最小二乘法.
在矩阵形式下,最小二乘法的解 w = ( X T X ) − 1 X T Y w = (X^TX)^{-1}X^TY w=(XTX)−1XTY, X X X是一个 m × n m×n m×n的矩阵,其中每一行代表样本,列代表样本的某一个属性。为了求得 w w w,则必须要求矩阵 ( X T X ) (X^TX) (XTX)满秩(满秩是可逆的充要条件)。然而在解决现实问题时,当 X X X中的某些属性相关性较大时, X X X不一定满秩(线性相关 ⇔ \Leftrightarrow ⇔行列式为0 ⇔ \Leftrightarrow ⇔矩阵不满秩)。除此之外,当 n n n的数量大于 m m m即样本矩阵的列数大于行数时, X X X也不满秩,因为:
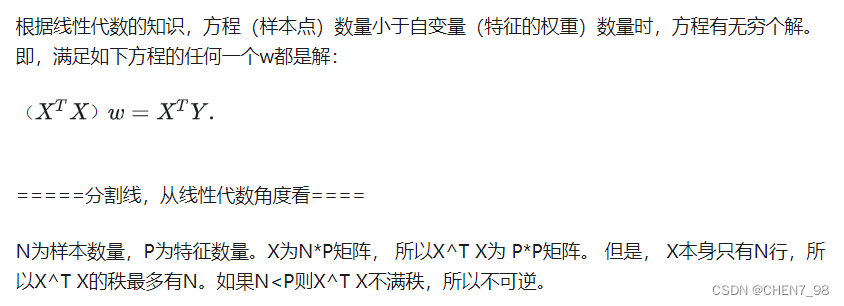
此时,由于 X T X X^TX XTX不满秩,则不可求其逆,因此无法算出最优解。那是否可以求一个近似最优解出来呢?
一个比较直观的想法是,在 X T X X^TX XTX中加上一个单位阵(即只有对角线有元素,其它处全为0的矩阵),该对角阵值的大小由一个参数 λ \lambda λ控制。
这样做的好处是,使得 X T X X^TX XTX变成满秩矩阵,这样是不是就可以求解了?而由于这个满秩矩阵是在原矩阵的基础上添加了扰动项(对角阵)得来的,所以最后求得的 w w w一般不是最优解,但是也是比较接近最优解了。(当最优解很难很难求解出时,可以较为简单地求出接近最优解的解一般是一种更好的选择)
最优解 w = ( X T X ) − 1 X T Y w = (X^TX)^{-1}X^TY w=(XTX)−1XTY,在加上由参数 λ \lambda λ控制的对角阵后,求得的次优解为 w = ( X T X + λ I n ) − 1 X T Y w = (X^TX+\lambda I_n)^{-1}X^TY w=(XTX+λIn)−1XTY ,其中:
-
I n I _n In是单位矩阵,对角线全是1,类似于“山岭”。
-
λ \lambda λ是岭系数,改变其数值可以改变单位矩阵对角线的值。
再反推目标函数,可以得到目标函数为:
arg min w ∣ ∣ X ⋅ w − Y ∣ ∣ 2 + λ ∣ ∣ w ∣ ∣ 2 \mathop{\arg\min}\limits_{w}||X \cdot w-Y||^2+\lambda||w||^2 wargmin∣∣X⋅w−Y∣∣2+λ∣∣w∣∣2
也就是说,岭回归其实就是在最小二乘法的基础上,加入了对 w w w的惩罚项,当 λ \lambda λ值越大时,惩罚强度就越大,生成的模型就越简单, ∣ ∣ w ∣ ∣ 2 ||w||^2 ∣∣w∣∣2也被称为L2范数。从整体上来看,岭回归是对最小二乘回归的一种补充,其损失了无偏性,但是获得了较高计算精度和数值稳定性。
这篇岭回归详解 从零开始 从理论到实践讲得可以,还有这篇岭回归原理简单分析与理解。
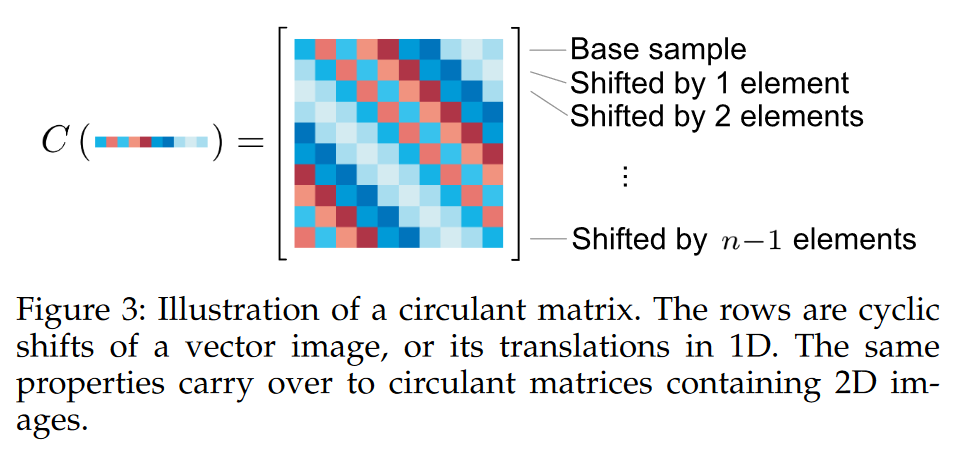
2. 循环移位和循环矩阵
参考【KCF算法解析】High-Speed Tracking with Kernelized Correlation Filters笔记 理解即可,注意生成循环矩阵的过程用 X = C ( x ) X=C(x) X=C(x)表示,其中 x x x是原向量, X X X是生成的循环矩阵。
3. 傅里叶对角化
All circulant matrices are made diagonal by the Discrete Fourier Transform (DFT), regardless of the generating vector x.
任意循环矩阵可以被傅里叶变换矩阵对角化。
参照这篇博客循环矩阵傅里叶对角化理解即可,我也没太懂。
4. 方向梯度直方图(HOG)
图像特征:方向梯度直方图 HOG
正文
全文内容概览参考这篇目标跟踪算法——KCF入门详解即可。
公式推导参考这篇KCF算法公式推导即可。
1. 线性回归
1.1. 岭回归
KCF的基本模型是岭回归器。
线性分类器:
f ( x ) = w T x (1) f(x)=w^Tx \tag 1 f(x)=wTx(1)
岭回归的目标函数:
arg min w ∣ ∣ X ⋅ w − Y ∣ ∣ 2 + λ ∣ ∣ w ∣ ∣ 2 (2) \mathop{\arg\min}\limits_{w}||X \cdot w-Y||^2+\lambda||w||^2 \tag 2 wargmin∣∣X⋅w−Y∣∣2+λ∣∣w∣∣2(2)
基于岭回归求得的闭式解(到底什么是“闭合解(Closed-form Solution)”):
w = ( X T X + λ I n ) − 1 X T Y (3) w=(X^TX+\lambda I_n)^{-1}X^TY \tag 3 w=(XTX+λIn)−1XTY(3)
变换到复数域的闭式解:
w = ( X H X + λ I n ) − 1 X H Y (4) w=(X^HX+\lambda I_n)^{-1}X^HY \tag 4 w=(XHX+λIn)−1XHY(4)
其中, X X X表示样本矩阵,其中每一行代表每一个样本,每一列代表所有样本的某个特征值, X H X^H XH表示其复数的共轭转置。
1.2. 基于循环矩阵获取正负样本
假设感兴趣区域的图像patch由一个长度为 n n n的向量 x x x表示, x x x也被称作基样本。这个很好理解吧,目标跟踪一般是给定一组连续帧,以及需要跟踪的目标在起始帧的位置信息,然后在接下来的连续帧中执行跟踪。那么我们最开始能够获得的目标特征,就用 x x x表示。
之后,原文中的一句话提到:
Our goal is to train a classifier with both the base sample (a positive example) and several virtual samples obtained by translating it (which serve as negative examples).
即,**作者计划通过基样本来生成正负样本,然后送给分类器来训练,以获得区分目标区域和其它区域的能力。**这句话也很好理解吧,就是基于初始帧以及给定的目标信息,获得目标的特征,然后在此基础上生成正负样本,正样本代表需要跟踪的目标,负样本代表背景或者其它干扰信息。这是目标跟踪领域的一个常见思路,典型的如TLD、MOOSE都采用了这种方法。
如何基于基样本生成正负样本呢?这里得用前面提到的循环矩阵。
对于基样本 x x x,生成的循环矩阵 X = C ( x ) X=C(x) X=C(x),文中给了个示意图:
OK,此时,基于循环矩阵得到的正负样本,采用岭回归训练线性模型,得到在复数域下的解析解和前面的公式相同,但是公式中字母的意义不同:
w = ( X H X + λ I n ) − 1 X H Y (5) w=(X^HX+\lambda I_n)^{-1}X^HY \tag 5 w=(XHX+λIn)−1XHY(5)
此时, X X X表示由初始向量 x x x(基样本)生成的循环矩阵, X H X^H XH表示其复数的共轭转置,即 X H = ( X ∗ ) T X^H=(X^*)^T XH=(X∗)T, X ∗ X^* X∗是 X X X的复数共轭形式。
1.3. 基于傅里叶对角化的求解
还记得前面提到的任意循环矩阵可以被傅里叶变换矩阵对角化吧,那么,用傅里叶对角化,我们就可以更快速地求解。
对于循环矩阵 X X X,其可以被傅里叶对角化:
X = C ( x ) = F d i a g ( x ^ ) F H (6) X=C(x)=F \mathrm{diag}(\hat{x})F^H \tag 6 X=C(x)=Fdiag(x^)FH(6)
其中, x ^ \hat{x} x^是 x x x的离散傅里叶变换,即 x ^ = F ( x ⃗ ) \hat{x}=\mathcal{F}(\vec{x}) x^=F(x)。 F F F是离散傅里叶变换矩阵,是一个不依赖于 x x x的常数矩阵。注意,离散傅里叶变换矩阵是一个酉矩阵,即其满足 F H F = F F H = I F^HF=FF^H=I FHF=FFH=I。
之后,经过公式推导,参考KCF算法公式推导,可以得到线性模型参数 w w w的求解结果:
w ^ = x ^ ∗ ⊙ y ^ x ^ ∗ ⊙ x ^ + λ (7) \hat{w}=\frac{\hat{x}^*\odot \hat{y}}{\hat{x}^*\odot \hat{x}+\lambda} \tag 7 w^=x^∗⊙x^+λx^∗⊙y^(7)
注意,这里求出的 w ^ \hat{w} w^是 w w w的傅里叶变换形式,使用逆向傅里叶变换即可以轻松地在空间域中恢复 w w w,这样我们就能在样本线性可分的前提下,基于训练样本,快速地求解出较优解 w w w(也就是能够快速地训练好分类模型)。
结果对比:
-
原闭式解 w = ( X H X + λ I n ) − 1 X H Y w=(X^HX+\lambda I_n)^{-1}X^HY w=(XHX+λIn)−1XHY的计算复杂度为 O ( n 3 ) O(n^3) O(n3)
-
简化后的解 w ^ = x ^ ∗ ⊙ y ^ x ^ ∗ ⊙ x ^ + λ \hat{w}=\frac{\hat{x}^*\odot \hat{y}}{\hat{x}^*\odot \hat{x}+\lambda} w^=x^∗⊙x^+λx^∗⊙y^的复杂度为 O ( n l o g n ) O(nlogn) O(nlogn)
所以,引入循环矩阵,不仅增强了样本,提高了准确率,而且简化了运算,提高了运行速度。
2. 使用非线性回归对模型进行训练
2.1. 应用kernel-trick的非线性模型的求解结果
上面只考虑了样本矩阵是线性可分的情况,而当数据在当前的特征空间中不能线性可分时,我们可以考虑把数据特征从当前特征空间映射到更高维的空间,从而使得在低维空间不可分的情况到高维空间之后就能变的线性可分了。核函数主要的目的就是把一个线性问题映射到一个非线性核空间,这样把在低维空间不可分的到核空间之后就能够可分了。
-
因此,需要找到一个非线性映射函数 φ ( x ) \varphi(x) φ(x),使得映射后的样本在高维空间中线性可分。那么在这个高维空间中,就可以**使用岭回归来寻找一个分类器 f ( x i ) = w T φ ( x i ) f(x_i)=w^T\varphi(x_i) f(xi)=wTφ(xi),**其中, φ ( x i ) \varphi(x_i) φ(xi)表示对样本 x i x_i xi通过非线性映射函数 φ \varphi φ变换到高维空间后的样本向量。
-
对于分类模型 f ( x i ) = w T φ ( x i ) f(x_i)=w^T\varphi(x_i) f(xi)=wTφ(xi), f ( x i ) f(x_i) f(xi)和 x i x_i xi都已知, φ ( ⋅ ) \varphi(\cdot) φ(⋅)取决于我们选取的映射函数,因此主要是想求得对 w w w的解,在使用Kernel-trick之后, w w w可以用训练样本的线性组合来表示:
w = ∑ i α i φ ( x i ) (8) w=\sum_i{\alpha_i \varphi(x_i)} \tag 8 w=i∑αiφ(xi)(8)
则最优化问题不再是求解 w w w,而是 α \alpha α。至于为什么可以将 w w w表示为样本的线性组合,可以参考这篇高维映射 与 核方法(Kernel Methods),里面有详细的解释,建议精读。 -
线性条件下的回归问题,经过非线性变换后,对于新样本 z z z的预测值为:
f ( z ) = w T z = ( ∑ i n α i φ ( x i ) ) T ⋅ φ ( z ) = ∑ i n α i φ ( x i ) T φ ( z ) = ∑ i n α i κ ( x i , z ) \begin{align*} f(z)&=w^Tz\\ &=(\sum_i^n{\alpha_i\varphi(x_i)})^T\cdot\varphi(z)\\ &=\sum_i^n{\alpha_i\varphi(x_i)}^T\varphi(z)\\ \tag9 &=\sum_i^n{\alpha_i\kappa(x_i,z)} \end{align*} f(z)=wTz=(i∑nαiφ(xi))T⋅φ(z)=i∑nαiφ(xi)Tφ(z)=i∑nαiκ(xi,z)(9)
其中, x i x_i xi代表训练分类器时的训练样本, z z z代表新出现的测试样本。即,预测其实是新样本与所有训练样本在高维空间中内积的加权平均。
对于 α \alpha α的求解,原文写得比较省略,原文中非线性情况下的最终求解结果(公式16)为
α = ( K + λ I ) − 1 y (10) \alpha=(K+\lambda I)^{-1}y \tag {10} α=(K+λI)−1y(10)
注意,这里的优化目标不是用 w w w而是用字母 α \alpha α表示, K K K代表核矩阵。
推导过程还是推荐仔细阅读这篇高维映射 与 核方法(Kernel Methods),阅读完之后也能了解什么是核技巧,以及为什么优化目标从线性可分情况下的 w w w换成了 α \alpha α。
2.2. 快速核方法
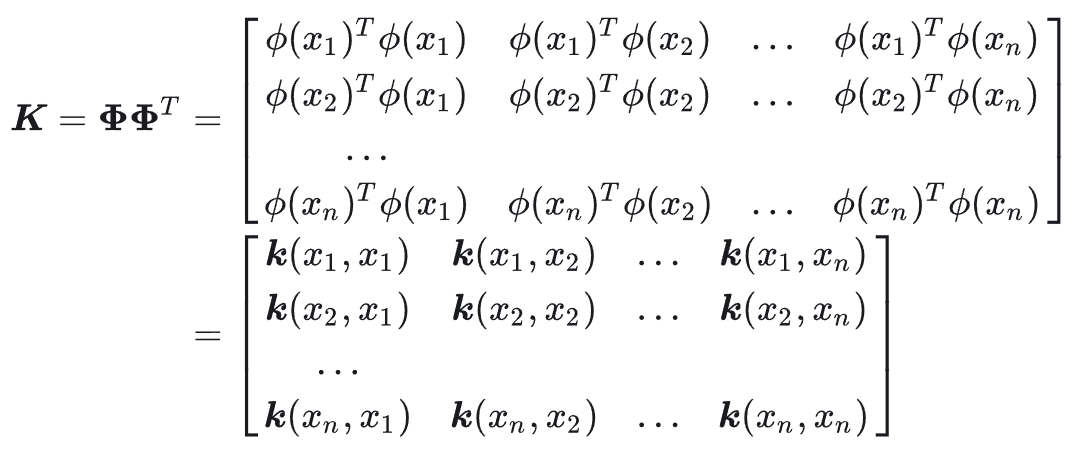
当采用基于Kernel trick的非线性模型训练时,最终求解目标 α = ( K + λ I ) − 1 y \alpha=(K+\lambda I)^{-1}y α=(K+λI)−1y包含了核矩阵 K K K。
而从核矩阵 K K K的公式中可以显而易见地发现,当数据样本量过大时,会导致核矩阵 K K K过大,从而使得计算的时间复杂度和空间复杂度都很高。
核方法并非没有缺点。原来的线性模型显然是一种参数化方法,好处是训练完成的模型只需要存储权重向量 。然而在使用了核方法以后,由于我们用训练集替换掉了权重项,因此相当于转化成了非参数化的方法,显然增加了需要存储的数据量,同时每一次做预测都需要用到全部训练数据集。
因此,本节中提到了一种快速的核回归方法。即怎么去计算核函数,怎么快速得到最优解。
原文的思路是:如果能证明核矩阵 K K K对于数据集来说是循环矩阵,就可以对其进行对角化,以加速求解过程。
通过施加一个条件来允许K循环。
定理一:给定循环矩阵 C ( x ) C(x) C(x),如果核函数 κ \kappa κ对于任何置换矩阵 M M M都满足 κ ( x , x ′ ) = κ ( M x , M x ′ ) \kappa(x,x')=\kappa(Mx,Mx') κ(x,x′)=κ(Mx,Mx′),则 C ( x ) C(x) C(x)在核函数 κ \kappa κ下对应的核矩阵 K K K是循环矩阵。
证明过程:假定有一个置换矩阵 P P P,如:
P = [ 0 0 0 ⋯ 1 1 0 0 ⋯ 0 0 1 0 ⋯ 0 0 0 1 ⋯ 0 ⋯ ⋯ ⋯ ⋯ ⋯ ] (11) P=\begin{bmatrix} 0 & 0 & 0 & \cdots & 1\\ 1 & 0 & 0 & \cdots & 0\\ 0 & 1 & 0 & \cdots & 0\\ 0 & 0 & 1 & \cdots & 0\\ \cdots & \cdots & \cdots & \cdots & \cdots\\ \end{bmatrix} \tag{11} P= 0100⋯0010⋯0001⋯⋯⋯⋯⋯⋯1000⋯ (11)
即对于基样本 x x x,有:
x 1 = P 0 x = x = [ x 1 , x 2 , ⋯ , x n ] T x 2 = P 1 x = [ x n , x 1 , ⋯ , x n − 1 ] T ⋯ x n = P n − 1 x = [ x 2 , x 3 , ⋯ , x 1 ] T (12) x_1=P^0x=x=[x_1,x_2,\cdots,x_n]^T\\ x_2=P^1x=[x_n,x_1,\cdots,x_{n-1}]^T\\ \tag{12} \cdots \\ x_n=P^{n-1}x=[x_2,x_3,\cdots,x_1]^T x1=P0x=x=[x1,x2,⋯,xn]Tx2=P1x=[xn,x1,⋯,xn−1]T⋯xn=Pn−1x=[x2,x3,⋯,x1]T(12)
则:
K i j = κ ( x i , x j ) = κ ( P i x , P j x ) \begin{align*} K_{ij}&=\kappa(x_i, x_j) \\ \tag{13} &= \kappa(P^ix,P^jx)\\ \end{align*} Kij=κ(xi,xj)=κ(Pix,Pjx)(13)
可以看到,从核矩阵 K K K的公式中,可以发现:
核矩阵中第 i i i行第 j j j列的值就是第 i i i和第 j j j个样本经过核函数之后得到的值再逐元素相乘计算出的内积。
而我们的样本矩阵是在基向量 x x x的基础上经过循环变换得到的循环矩阵,也就是说,这个式子,刚好满足我们之前的所有假设和前提。这里可能有点绕,得细细思考一会。
现在,由于定理中提到的是任意变换 M M M,那我们就假设 M M M这个置换矩阵为 P − i P^{-i} P−i。
由于 κ ( x , x ′ ) = κ ( M x , M x ′ ) \kappa(x,x')=\kappa(Mx,Mx') κ(x,x′)=κ(Mx,Mx′),所以有:
κ ( M x i , M x j ) = κ ( x i , x j ) = κ ( P − i P i x , P − i P j x ) = κ ( x , P j − i x ) = K i j \begin{align*} \kappa(Mx_i, Mx_j)&=\kappa(x_i, x_j) \\ &= \kappa(P^{-i}P^ix,P^{-i}P^jx)\\ \tag{14} &= \kappa(x,P^{j-i}x)\\ &= K_{ij} \end{align*} κ(Mxi,Mxj)=κ(xi,xj)=κ(P−iPix,P−iPjx)=κ(x,Pj−ix)=Kij(14)
由于 P n = P 0 P^n=P^0 Pn=P0,也就是当 j − i j-i j−i的值每到 n n n时为一个循环,所以上式可以改写为 K i j = κ ( x , P ( j − i ) m o d n x ) K_{ij}=\kappa(x,P^{(j-i)mod\space n}x) Kij=κ(x,P(j−i)mod nx),即:
K = [ κ ( x , P 0 x ) κ ( x , P 1 x ) ⋯ κ ( x , P n − 1 x ) κ ( x , P 1 x ) κ ( x , P 2 x ) ⋯ κ ( x , P 0 x ) ⋮ ⋮ ⋱ ⋮ κ ( x , P n − 1 x ) κ ( x , P 0 x ) ⋯ κ ( x , P n − 2 x ) ] (15) K=\begin{bmatrix} \kappa(x,P^{0}x) & \kappa(x,P^{1}x) & \cdots & \kappa(x,P^{n-1}x)\\ \kappa(x,P^{1}x) & \kappa(x,P^{2}x) & \cdots & \kappa(x,P^{0}x)\\ \vdots & \vdots & \ddots & \vdots \\ \tag{15} \kappa(x,P^{n-1}x) & \kappa(x,P^{0}x) & \cdots & \kappa(x,P^{n-2}x) \end{bmatrix} K= κ(x,P0x)κ(x,P1x)⋮κ(x,Pn−1x)κ(x,P1x)κ(x,P2x)⋮κ(x,P0x)⋯⋯⋱⋯κ(x,Pn−1x)κ(x,P0x)⋮κ(x,Pn−2x) (15)
可以看到,此时核矩阵 K K K是一个循环矩阵。
原文中提到,下面的核函数都满足定理一:
- 径向基函数核,如:高斯核;
- 点积核,如:线性核、多项式核;
- 加权核,如:交集、 χ 2 \chi^2 χ2;
- 指数加权核
当 K K K为循环矩阵时,由前面关于循环矩阵的知识,可以得知核矩阵 K K K中的所有元素都是基于其第一行这个向量循环移位得到的。令 k x x k^{xx} kxx为核矩阵 K K K中的第一行向量,则 K = C ( k x x ) K=C(k^{xx}) K=C(kxx)。
原文中非线性情况下的最终求解结果(公式16)为
α = ( K + λ I ) − 1 y (10) \alpha=(K+\lambda I)^{-1}y \tag{10} α=(K+λI)−1y(10)
由于 K K K为循环矩阵,则可以应用傅里叶对角化求解:
α = ( K + λ I ) − 1 y = ( C ( k x x ) + λ I ) − 1 y = ( F d i a g ( k ^ x x ) F H + λ I ) − 1 y = ( F d i a g ( k ^ x x + λ ) F H ) − 1 y = ( F H ) − 1 ( d i a g ( k ^ x x + λ ) − 1 ) F − 1 y = F d i a g ( k ^ x x + λ ) − 1 F H y = F d i a g ( 1 k ^ x x + λ ) F H y \begin{align*} \alpha&=(K+\lambda I)^{-1}y\\ &=(C(k^{xx})+\lambda I)^{-1}y\\ &=(F\mathrm{diag}(\hat{k}^{xx})F^H+\lambda I)^{-1}y\\ &=(F\mathrm{diag}(\hat{k}^{xx}+\lambda)F^H)^{-1}y\\ &=(F^H)^{-1}(\mathrm{diag}(\hat{k}^{xx}+\lambda)^{-1})F^{-1}y\\ \tag{16} &=F\mathrm{diag}(\hat{k}^{xx}+\lambda)^{-1}F^Hy\\ &=F\mathrm{diag}(\frac{1}{\hat{k}^{xx}+\lambda})F^Hy \end{align*} α=(K+λI)−1y=(C(kxx)+λI)−1y=(Fdiag(k^xx)FH+λI)−1y=(Fdiag(k^xx+λ)FH)−1y=(FH)−1(diag(k^xx+λ)−1)F−1y=Fdiag(k^xx+λ)−1FHy=Fdiag(k^xx+λ1)FHy(16)
这里用到了离散傅里叶变换矩阵是酉矩阵的性质,对公式两边进行离散傅里叶变换得到:
α ^ = y ^ k ^ x x + λ (17) \hat{\alpha}=\frac{\hat{y}}{\hat{k}^{xx}+\lambda} \tag{17} α^=k^xx+λy^(17)
从上面这个公式,也就是原文中的公式(17)可以发现,当保证核矩阵 K K K为循环矩阵时,通过傅里叶对角化,可以使得对 α \alpha α的求解过程只需要涉及到核矩阵 K K K中的第一行向量 k ^ x x \hat{k}^{xx} k^xx( 1 × n 1\times n 1×n大小),而 k ^ x x \hat{k}^{xx} k^xx是随着样本数量线性变化的。这意味着什么?传统的核方法需要计算一个 n × n n\times n n×n的核矩阵,与样本数量呈平方增长。
这意味着快速核方法大大节省了空间资源和时间资源。
2.3. 快速检测
在2.2节中,得到了系数 α \alpha α的简化求解形式(训练过程),而为了进一步提高算法的运行速度,文章对检测的过程也进行了简化加速。
首先由训练样本和其对应的标签训练检测器,其中训练集是由目标区域和由其移位得到的若干样本组成,对应的标签是根据距离越近正样本可能性越大的准则赋值的,然后可以得到 α \alpha α。
由式(9)可得,当对新样本 z z z(待检测的图像patch)进行检测时,有:
f ( z ) = K α (18) f(z)=K\alpha \tag{18} f(z)=Kα(18)
注意,岭回归中包含的正则化只在训练时使用,对于预测,直接用求解好的 α \alpha α和核矩阵 K K K即可。
现在,用 K z K^z Kz替换 K K K,考虑到实际情况,式(18)变为:
f ( z ) = ( K z ) T α (19) f(z)=(K^z)^T\alpha \tag{19} f(z)=(Kz)Tα(19)
其中, K z = C ( k x z ) K^z=C(k^{xz}) Kz=C(kxz),表示训练样本和待检测样本之间的核矩阵,是一个非对称矩阵。 k x z k^{xz} kxz表示由基样本 x x x和基础待检测图像patch z z z计算得到的核相关向量, C C C仍代表循环位移操作。
由前面的内容易知, K z K^z Kz中的元素可以被表示为 κ ( P i − 1 z , P j − 1 x ) \kappa(P^{i-1}z,P^{j-1}x) κ(Pi−1z,Pj−1x), P P P的定义如式(11)所示。
基于定理一,同样可以证明训练样本和检测样本之间的核矩阵 K z K^z Kz为循环矩阵,因此可以对其进行傅里叶对角化,有:
f ( z ) = ( K z ) T α = ( C ( k x z ) ) T α = ( F d i a g ( k ^ x z ) F H ) T α = F H d i a g ( k ^ x z ) F α \begin{align*} f(z)&=(K^z)^T\alpha \\ &=(C(k^{xz}))^T\alpha\\ &=(F\mathrm{diag}(\hat{k}^{xz})F^H)^T\alpha \\ \tag{20} &=F^H\mathrm{diag}(\hat{k}^{xz})F\alpha \end{align*} f(z)=(Kz)Tα=(C(kxz))Tα=(Fdiag(k^xz)FH)Tα=FHdiag(k^xz)Fα(20)
考虑到离散傅里叶变换矩阵 F F F的性质,则有:
F f ( z ) = d i a g ( k ^ x z ) F α (21) Ff(z)=\mathrm{diag}(\hat{k}^{xz})F\alpha \tag{21} Ff(z)=diag(k^xz)Fα(21)
舍掉 F F F,再进行傅里叶变换,则可以得到最终的快速检测公式:
f ^ ( z ) = k ^ x z ⊙ α ^ (22) \hat{f}(z)=\hat{k}^{xz}\odot\hat{\alpha} \tag{22} f^(z)=k^xz⊙α^(22)
该公式可以理解为用 α \alpha α对核矩阵 K z K^z Kz进行空间滤波操作(或者是线性加权),生成的 f ( z ) f(z) f(z)是一个向量,代表所有可能位置的置信度值,最大的置信度值对应的patch即作为检测的输出。
3. 快速核相关
尽管前面已经提出了快速训练和快速检测的方法,但它们仍依赖于计算两个图像块的核相关性这一过程(如 k x x k^{xx} kxx和 k x z k^{xz} kxz),根据前面的内容,核相关操作包含了计算两个输入(及所有相对位移)的高维特征点乘值,这是最后一个需要解决的计算瓶颈。因此本节对核相关过程进行了加速。
这一节主要就是介绍几种常见的核函数的形式,以及每种核函数所对应的快速计算方式。
-
点积核:
k x x ′ = g ( F − 1 ( x ^ ∗ ⊙ x ^ ′ ) ) (23) k^{xx'}=g(\mathcal{F}^{-1}(\hat{x}^*\odot\hat{x}')) \tag{23} kxx′=g(F−1(x^∗⊙x^′))(23) -
多项式核:
k x x ′ = ( F − 1 ( x ^ ∗ ⊙ x ^ ′ ) + a ) b (24) k^{xx'}=(\mathcal{F}^{-1}(\hat{x}^*\odot\hat{x}')+a)^b \tag{24} kxx′=(F−1(x^∗⊙x^′)+a)b(24) -
对于某种径向基函数 h h h,其核函数可表示为:
k x x ′ = h ( ∣ ∣ x ′ ∣ ∣ 2 + ∣ ∣ x ∣ ∣ 2 − 2 F − 1 ( x ^ ∗ ⊙ x ^ ′ ) ) (25) k^{xx'}=h(||x'||^2+||x||^2-2\mathcal{F}^{-1}(\hat{x}^*\odot\hat{x}')) \tag{25} kxx′=h(∣∣x′∣∣2+∣∣x∣∣2−2F−1(x^∗⊙x^′))(25) -
高斯核:
k x x ′ = e x p ( − 1 σ 2 ( ∣ ∣ x ′ ∣ ∣ 2 + ∣ ∣ x ∣ ∣ 2 − 2 F − 1 ( x ^ ∗ ⊙ x ^ ′ ) ) ) (26) k^{xx'}=exp(-\frac{1}{\sigma^2}(||x'||^2+||x||^2-2\mathcal{F}^{-1}(\hat{x}^*\odot\hat{x}'))) \tag{26} kxx′=exp(−σ21(∣∣x′∣∣2+∣∣x∣∣2−2F−1(x^∗⊙x^′)))(26)
4. KCF算法流程
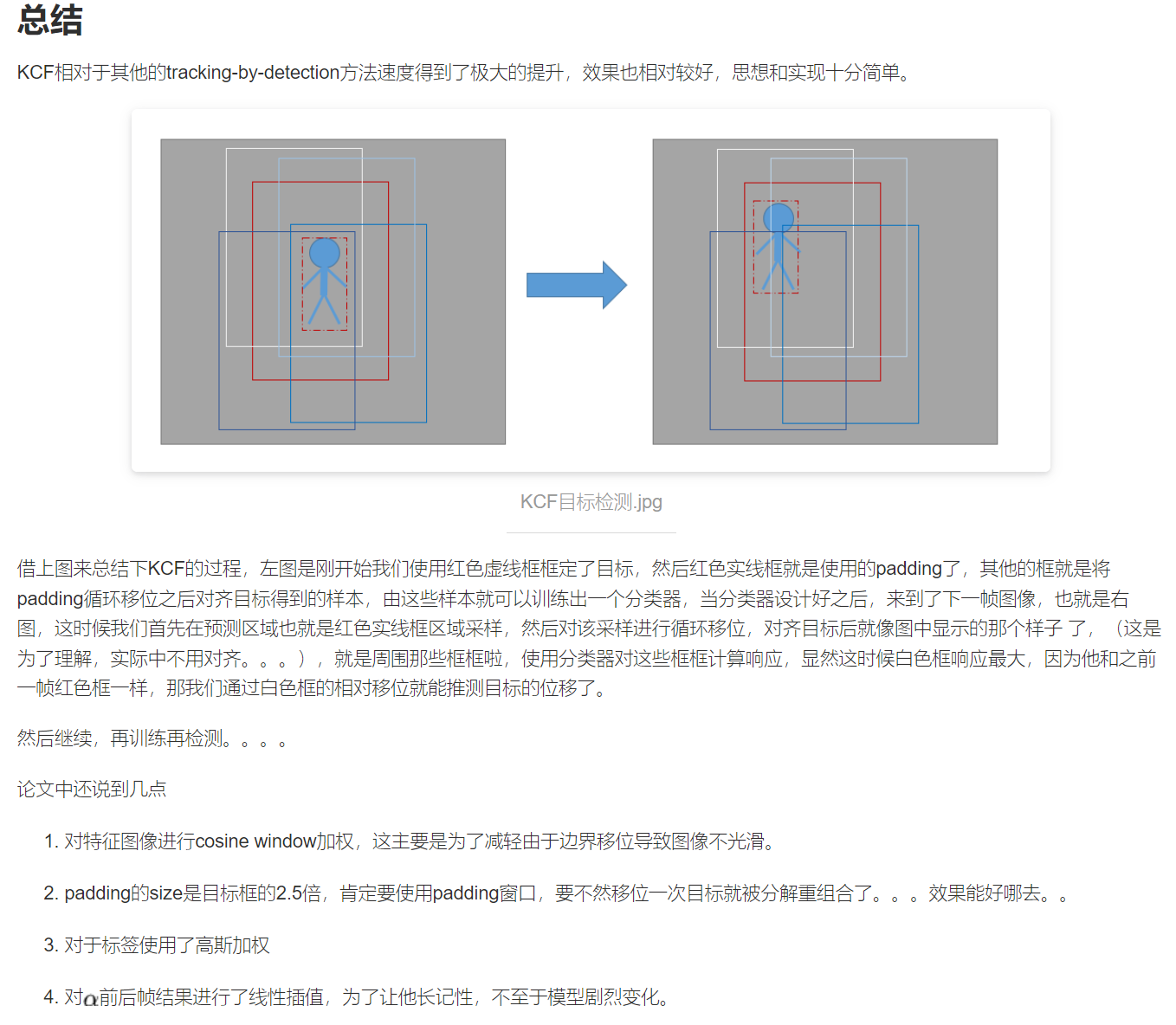
5. 总结
相关文章:
Kernelized Correlation Filters KCF算法原理详解(阅读笔记)(待补充)
KCF 目录 KCF预备知识1. 岭回归2. 循环移位和循环矩阵3. 傅里叶对角化4. 方向梯度直方图(HOG) 正文1. 线性回归1.1. 岭回归1.2. 基于循环矩阵获取正负样本1.3. 基于傅里叶对角化的求解 2. 使用非线性回归对模型进行训练2.1. 应用kernel-trick的非线性模型…...
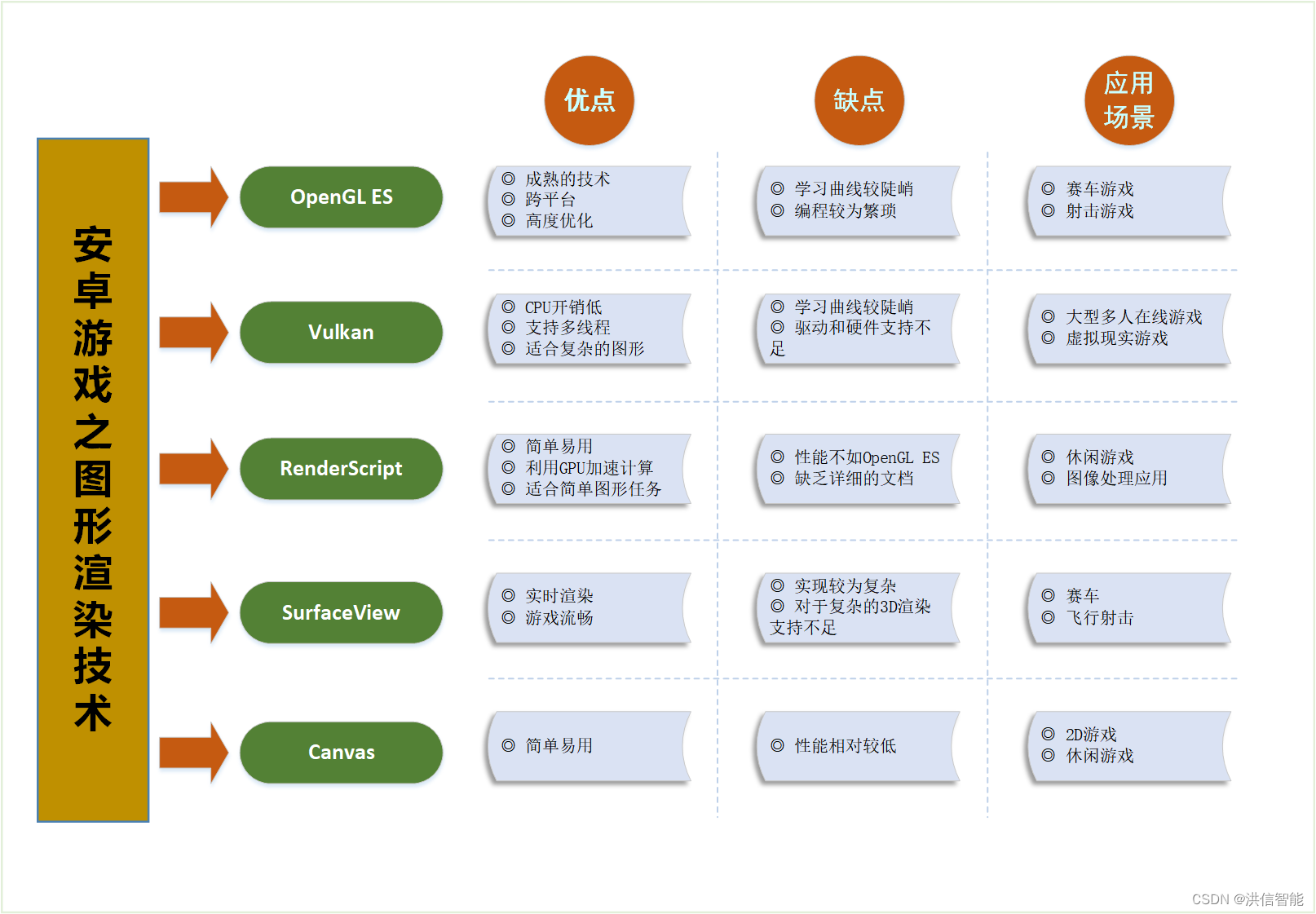
安卓游戏开发之图形渲染技术优劣分析
一、引言 随着移动设备的普及和性能的提升,安卓游戏开发已经成为一个热门领域。在安卓游戏开发中,图形渲染技术是关键的一环。本文将对安卓游戏开发中常用的图形渲染技术进行分析,比较它们的优劣,并探讨它们在不同应用场景下的适用…...

python+django+vue汽车票在线预订系统58ip7
本课题使用Python语言进行开发。基于web,代码层面的操作主要在PyCharm中进行,将系统所使用到的表以及数据存储到MySQL数据库中 使用说明 使用Navicat或者其它工具,在mysql中创建对应名称的数据库,并导入项目的sql文件; 使用PyChar…...

2024-2-19
编译安装php下载依赖包时遇到的报错 [rootmasternamed ~]# yum -y install php-mcrypt \ > libmcrypt \ > libmcrypt-devel \ > autoconf \ > freetype \ > gd \ > libmcrypt \ > libpng \ > libpng-devel \ > libjpeg \ > libxml2 \…...

ARM体系在linux中的中断抢占
上一篇说到系统调用等异常通过向量el1_sync做处理,中断通过向量el1_irq做处理,然后gic的工作都是为中断处理服务,在rtos中,我们一般都会有中断嵌套和优先级反转的概念,但是在linux中,中断是否会被其他中断抢…...
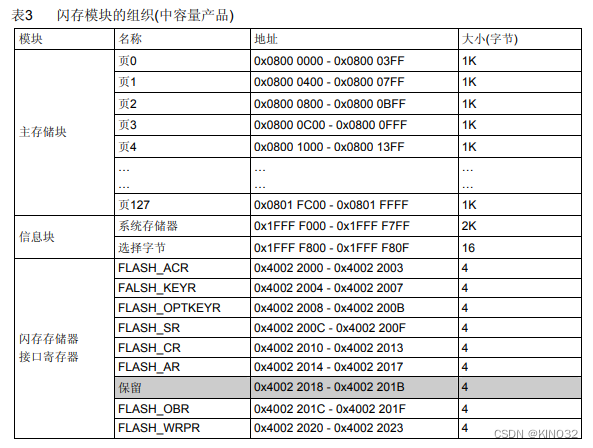
STM32的FLASH操作
时间记录:2024/2/19 一、STM32F103C8T6FLASH介绍 (1)flash大小64K,地址0x08000000-0x08010000 (2)此芯片内存大小属于中容量产品,根据数据手册可知中容量产品一个扇区的大小为1K (…...

electron Tab加载动画开启和关闭
记个开发中的bug,以此为鉴。眼懒得时候手勤快点儿,不要想当然!!! 没有转载的价值,请勿转载搬运呦。 WebContents API: Event: did-finish-load 导航完成时触发,即选项卡的旋转…...

深度学习发展的艺术
将人类直觉和相关数学见解结合后,经过大量研究试错后的结晶,产生了一些成功的深度学习模型。 深度学习模型的进展是理论研究与实践经验相结合的产物。科学家和工程师们借鉴了人类大脑神经元工作原理的基本直觉,并将这种生物学灵感转化为数学模…...
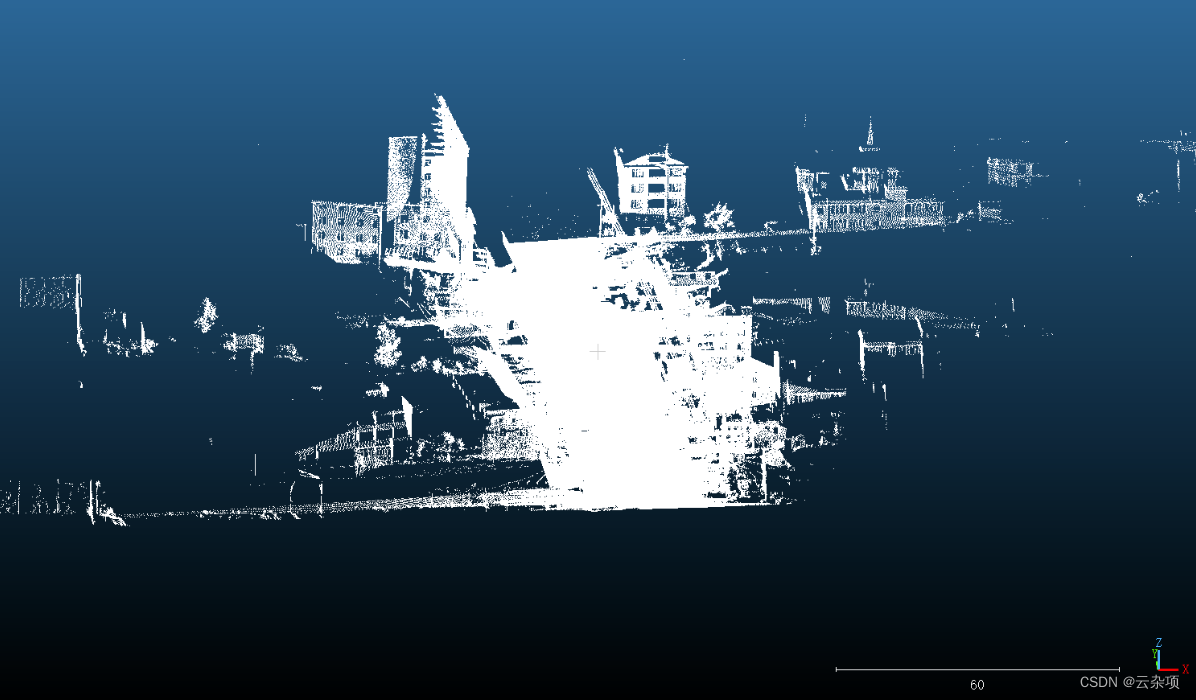
las数据转pcd数据
las数据转pcd数据 一、算法原理1.介绍las2.主要函数 二、代码三、结果展示3.1 las数据3.2 las转换为pcd 四、相关数据链接 一、算法原理 1.介绍las LAS文件按每条扫描线排列方式存放数据,包括激光点的三维坐标、多次回波信息、强度信息、扫描角度、分类信息、飞行航带信息、飞…...
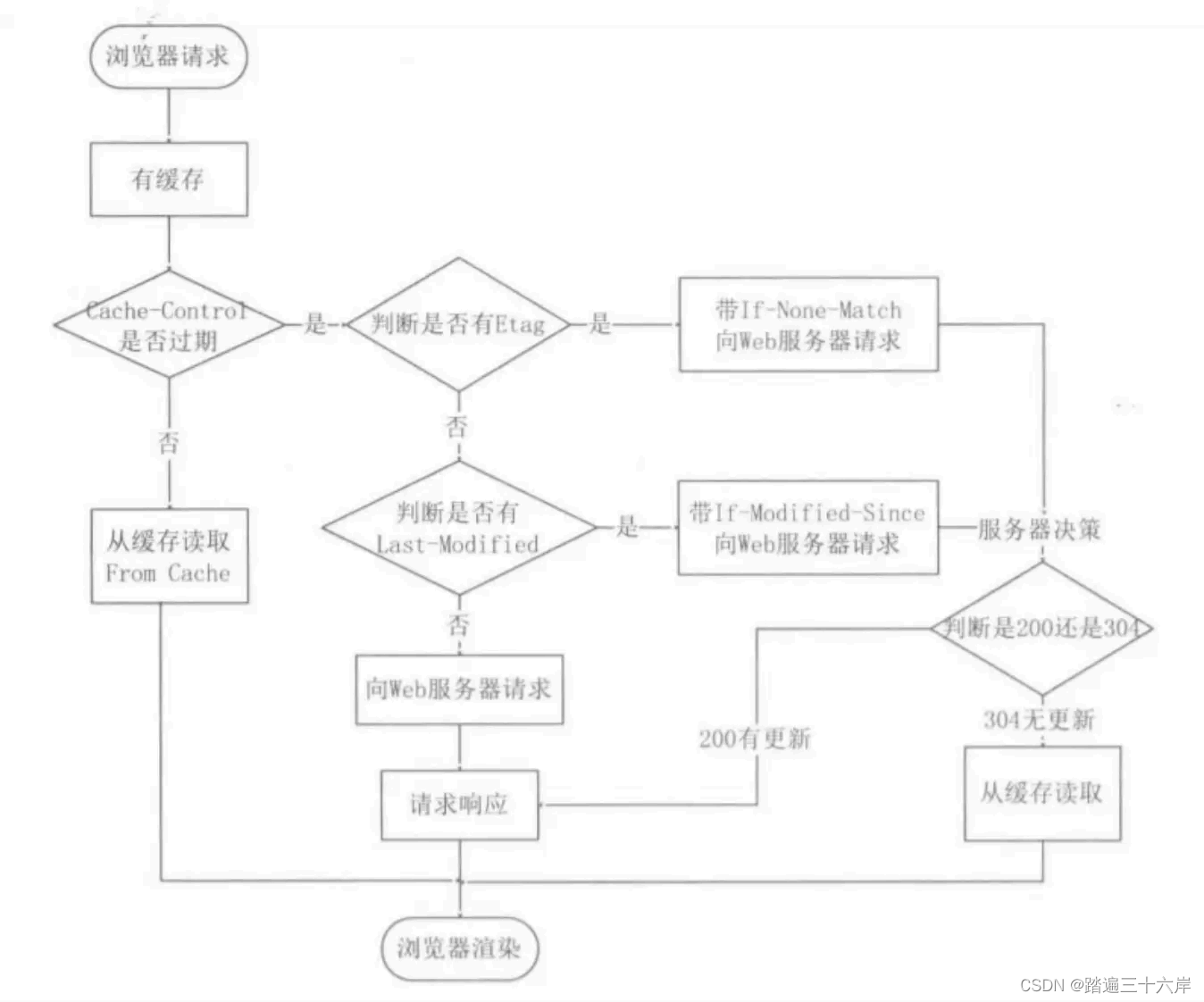
HTTP缓存技术
大家好我是苏麟 , 今天说说HTTP缓存技术 . 资料来源 : 小林coding 小林官方网站 : 小林coding (xiaolincoding.com) HTTP缓存技术 HTTP 缓存有哪些实现方式? 对于一些具有重复性的 HTTP 请求,比如每次请求得到的数据都一样的,我们可以把这对「请求-响…...

USACO 2024年1月铜组 MAJORITY OPINION
第一题:MAJORITY OPINION 标签:思维、模拟 题意:给定一个长度为 n n n的序列 a a a,操作:若区间 [ i , j ] [i,j] [i,j]内某个数字 k k k出现的次数 大于区间长度的一半,可以将区间内的所有数都换成这个数…...
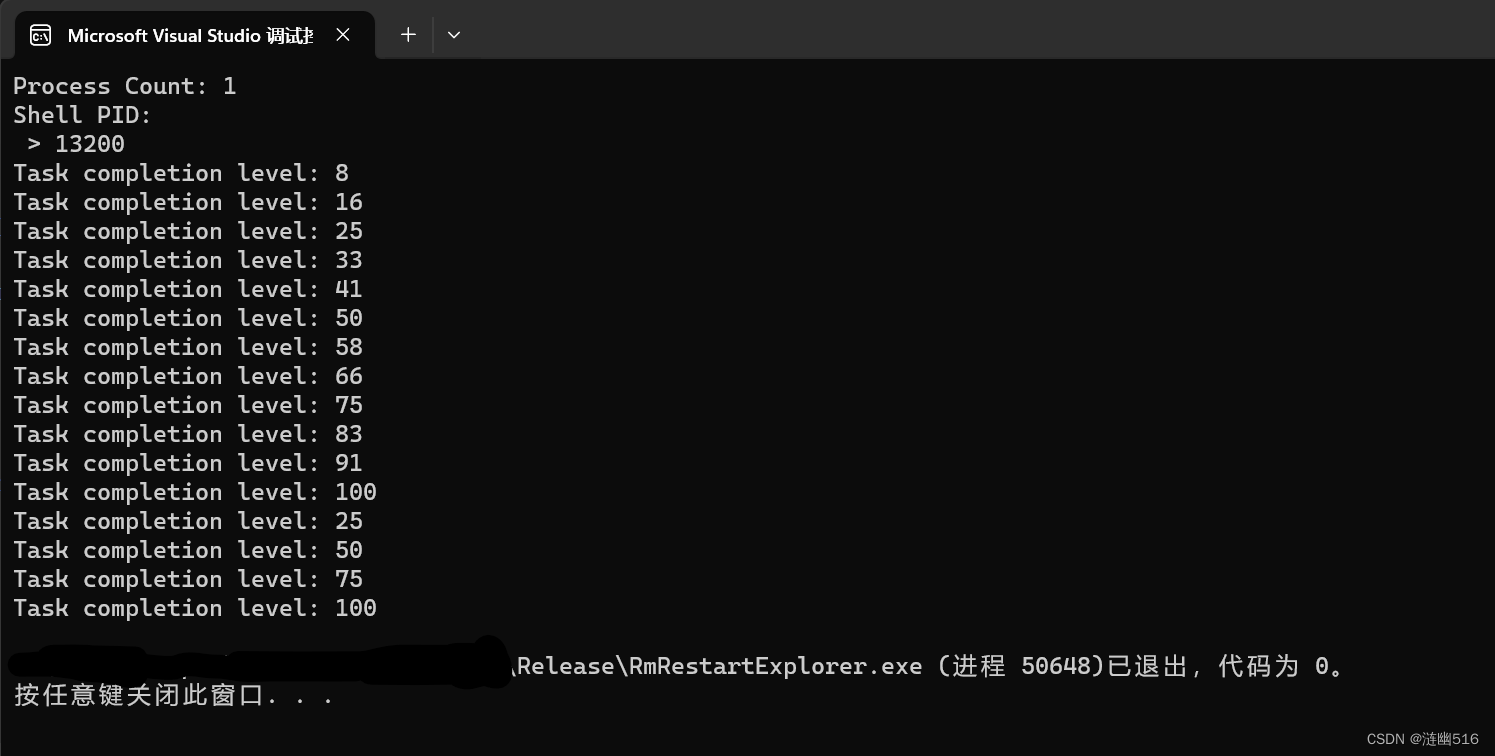
Windows 重启 explorer 的正确做法
目录 一、关于 Restart Manager 二、重启管理器实例 三、完整实现代码和测试 本文属于原创文章,转载请注明出处: https://blog.csdn.net/qq_59075481/article/details/136179191。 我们往往使用 TerminateProcess 并传入 PID 和特殊结束代码 1 或者…...
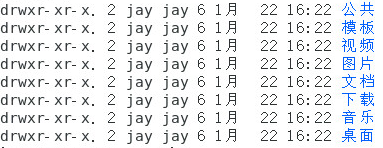
linux基础学习(10):基本权限与相关命令
1.基本权限 用ls -l查看当前目录文件时,可以看到文件的基本权限 其由10位组成,其中: 第1位:代表文件类型。 - d lbc普通文件目录文件软链接文件块设备文件,也就是硬盘等存储设备的文件字符设备文件,是鼠…...

木马植入方式及防范手段
木马植入方式: 1. 诱骗下载和安装:通过欺骗、社交工程等手段,诱使用户下载和安装包含木马的软件或文件。 2. 隐秘附加:将木马隐藏在合法软件的背后,并伴随软件一起安装,用户在不知情的情况下也会安装木马。…...

Unity3D中刚体、碰撞组件、物理组件的区别详解
前言 Unity3D提供了丰富的功能和组件,其中包括刚体、碰撞组件和物理组件。这些组件在游戏开发中起着非常重要的作用,能够让游戏世界更加真实和有趣。本文将详细介绍这三种组件的区别以及如何在Unity3D中实现它们。 对惹,这里有一个游戏开发…...
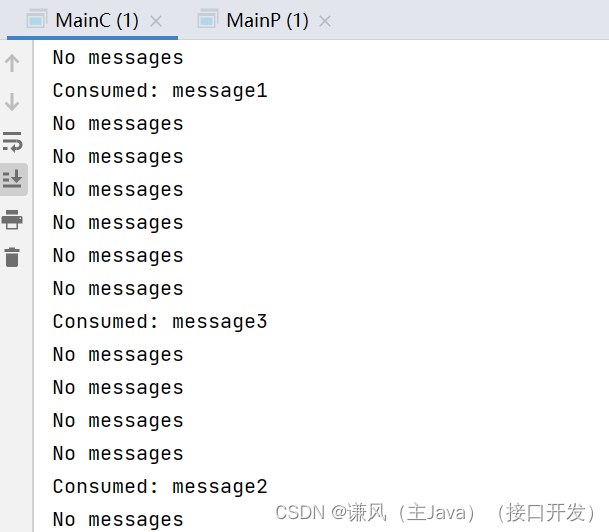
Java实现Redis延时队列
“如何实现Redis延时队列”这个面试题应该也是比较常见的,解答如下: 使用sortedset(有序集合) ,拿时间戳作为 score ,消息内容作为key 调用 zadd 来生产消息,消费者用zrangebyscore 指令获取 N …...

Selenium折线图自动化测试
目录 获取折线图echarts实例 获取折线图实例锚点的坐标 通过echarts实例的getOption()方法获取坐标数据 将折线图坐标点转换为像素坐标值 整合折线图坐标数据 根据折线图坐标计算出锚点相对于浏览器中的坐标 计算canvas画布原点的坐标 计算折线图相对于浏览器的坐标 使用…...
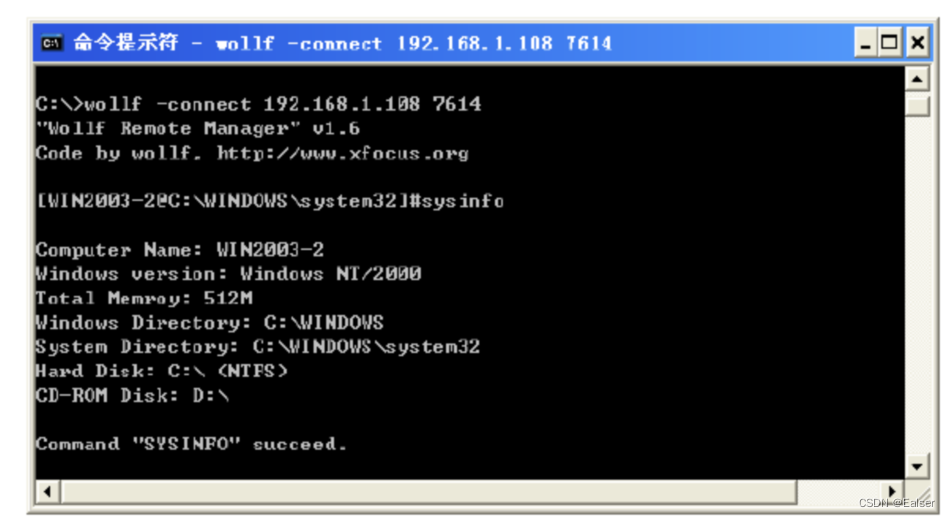
<网络安全>《41 网络攻防专业课<第七课 - IIS上传和Tomcat弱口令漏洞攻击与防范>》
1 中间件PUT漏洞介绍 中间件包括apache、tomcat、IIS、weblogic等,这些中间件可以设置支持的HTTP方法。(HTTP方法包括GET、POST、HEAD、DELETE、PUT、OPTIONS等) 每一个HTTP方法都有其对应的功能,在这些方法中,PUT可…...

云计算基础-虚拟化概述
虚拟化概述 虚拟化是一种资源管理技术,能够将计算机的各种实体资源(如CPU、内存、磁盘空间、网络适配器等)予以抽象、转换后呈现出来并可供分割、组合为一个或多个逻辑上的资源。这种技术通过在计算机硬件上创建一个抽象层,将单台…...

ElementUI +++ Echarts面试题答案汇总
官网地址:http://element-cn.eleme.io/#/zh-CN ElementUI是一套基于VUE2.0的桌面端组件库,ElementUI提供了丰富的组件帮助开发人员快速构建功能强大、风格统一的页面。 ElementUi是怎么做表单验证的?在循环里对每个input验证怎么做呢&#x…...
)
【限时公开】我们压测了23个开源AI Agent框架,仅2个支持亚秒级SQL生成+自动schema纠错(测试报告PDF已备)
更多请点击: https://codechina.net 第一章:AI Agent数据分析应用 AI Agent 正在重塑数据分析的范式——它不再依赖人工编写 SQL 或手动配置 ETL 流程,而是通过自然语言理解任务意图、自主调用工具、迭代验证结果,并生成可解释的…...

2026年,探寻靠谱体育器材的终极指南
在追求健康与活力的时代,体育器材成为了我们运动生活中的重要伙伴。但面对市场上琳琅满目的品牌和产品,如何选择靠谱的体育器材成为了许多人的难题。今天,让我们一同探寻 2026 年靠谱体育器材的终极指南。一、品质与口碑沧州九牌体育用品制造…...

基因鉴定步骤及常见问题
一、基因组 DNA 提取(一)消化鼠尾消化液配方为溶剂水与SDS、酶。Solution:0.5%SDS破坏细胞膜和核膜,释放DNA。Enzyme:1 mg/ml蛋白酶K分解样本中的蛋白质,释放DNA。(二)样品处理1、小…...

第 3 篇:让 Agent 学会分工,LangGraph 构建多 Agent系统
系列简介:从零搭建一个多 Agent AI 助手,覆盖原理、实现、部署全链路。不讲空话,每篇都有可运行的代码。 项目地址:https://github.com/CodeMomentYY/LangGraph-Agent 本篇目标:用 LangGraph 搭建一个多 Agent 协作系统…...

2026年外贸管理软件怎么选?B2B与跨境B2C实用选型指南
在外贸行业数字化升级过程中,企业挑选管理软件,首要理清自身业务赛道。目前行业主流分为传统外贸B2B、跨境电商B2C两大模式。结合企业实际经营需求,传统B2B可划分为获客拓客类工具、内部业务管理类系统;跨境B2C可划分为前端店铺运…...
)
从电影运镜到游戏镜头:手把手教你用Cinemachine实现高级镜头语言(含Dutch Angle等实战配置)
从电影运镜到游戏镜头:手把手教你用Cinemachine实现高级镜头语言(含Dutch Angle等实战配置) 在游戏开发中,镜头语言是叙事和情感表达的重要工具。就像电影导演通过精心设计的镜头来引导观众情绪一样,游戏开发者也可以…...

QLoRA微调Mistral-7B实战:4-bit量化+LoRA端到端跑通指南
1. 这不是理论课,是能跑通的实操手册:QLoRA微调Mistral-7B到底在做什么 你点开这篇,大概率正卡在某个环节:Colab里 model.generate() 报错OOM, bitsandbytes 安装失败后反复重装,或者训练跑了一小时发现…...

当IP矩阵遇上GEO,中小企业如何实现“双轮驱动”?
流量入口正在从搜索框向对话栏迁徙,你的品牌是“被看见”还是“被信任”?一、一个正在发生的营销范式革命2026年的一个真实场景:当潜在客户向豆包或千问提问“哪家公司的XX服务比较好”时,AI给出的推荐列表里,你的品牌…...

C# WebAssembly构建高性能Web3D引擎实战
1. 这不是“把C#搬到浏览器”,而是重构Web图形开发的底层契约 你有没有试过在浏览器里跑一个带物理模拟、动态光照和实时骨骼动画的3D场景,结果发现JavaScript主线程卡成PPT,WebGL状态管理像在解九连环?我去年接手一个工业数字孪生…...

Cortex-M55内存属性与缓存机制深度解析
1. Cortex-M55内存属性与缓存机制解析 在嵌入式系统开发中,正确配置内存属性对于系统性能和功能正确性至关重要。Cortex-M55作为Armv8-M架构的处理器,通过内存保护单元(MPU)和内存属性间接寄存器(MAIR_ATTR)提供了灵活的内存属性配置能力。本文将深入剖析…...