14. rk3588自带的RKNNLite检测yolo模型(python)
首先将文件夹~/rknpu2/runtime/RK3588/Linux/librknn_api/aarch64/下的文件librknnrt.so复制到文件夹/usr/lib/下(该文件夹下原有的文件librknnrt.so是用来测试resnet50模型的,所以要替换成yolo模型的librknnrt.so),如下图所示:
![]()
然后在文件夹/home/rpdzkj/rknn-toolkit-lit2-examples/inference_with_lite/下放入以下3个文件:
bus.jpg best.rknn des.py
其中bus.jpg是要检测的图片,best.rknn是我们转换的yolov5的rknn模型,des.py是要运行的py代码,其代码如下:
# -*- coding: utf-8 -*-
# coding:utf-8import os
import urllib
import traceback
import time
import sys
import numpy as np
import cv2
import platform
from rknnlite.api import RKNNLite
from PIL import Image# Model from https://github.com/airockchip/rknn_model_zoo
RKNN_MODEL = 'best.rknn'
IMG_PATH = './bus.jpg'
DATASET = './dataset.txt'QUANTIZE_ON = True
BOX_THRESH = 0.5
OBJ_THRESH = 0.45
NMS_THRESH = 0.65
IMG_SIZE = 640CLASSES = ("car", "moto", "persons")# decice tree for rk356x/rk3588
DEVICE_COMPATIBLE_NODE = '/proc/device-tree/compatible'def get_host():# get platform and device typesystem = platform.system()machine = platform.machine()os_machine = system + '-' + machineif os_machine == 'Linux-aarch64':try:with open(DEVICE_COMPATIBLE_NODE) as f:device_compatible_str = f.read()host = 'RK3588'except IOError:print('Read device node {} failed.'.format(DEVICE_COMPATIBLE_NODE))exit(-1)else:host = os_machinereturn hostINPUT_SIZE = 640RK3588_RKNN_MODEL = 'best.rknn'def sigmoid(x):return 1 / (1 + np.exp(-x))def xywh2xyxy(x):# Convert [x, y, w, h] to [x1, y1, x2, y2]y = np.copy(x)y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left xy[:, 1] = x[:, 1] - x[:, 3] / 2 # top left yy[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right xy[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right yreturn ydef process(input, mask, anchors):anchors = [anchors[i] for i in mask]grid_h, grid_w = map(int, input.shape[0:2])box_confidence = sigmoid(input[..., 4])box_confidence = np.expand_dims(box_confidence, axis=-1)box_class_probs = sigmoid(input[..., 5:])box_xy = sigmoid(input[..., :2]) * 2 - 0.5col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)grid = np.concatenate((col, row), axis=-1)box_xy += gridbox_xy *= int(IMG_SIZE/grid_h)box_wh = pow(sigmoid(input[..., 2:4]) * 2, 2)box_wh = box_wh * anchorsbox = np.concatenate((box_xy, box_wh), axis=-1)return box, box_confidence, box_class_probsdef filter_boxes(boxes, box_confidences, box_class_probs):"""Filter boxes with box threshold. It's a bit different with origin yolov5 post process!# Argumentsboxes: ndarray, boxes of objects.box_confidences: ndarray, confidences of objects.box_class_probs: ndarray, class_probs of objects.# Returnsboxes: ndarray, filtered boxes.classes: ndarray, classes for boxes.scores: ndarray, scores for boxes."""boxes = boxes.reshape(-1, 4)box_confidences = box_confidences.reshape(-1)box_class_probs = box_class_probs.reshape(-1, box_class_probs.shape[-1])_box_pos = np.where(box_confidences >= OBJ_THRESH)boxes = boxes[_box_pos]box_confidences = box_confidences[_box_pos]box_class_probs = box_class_probs[_box_pos]class_max_score = np.max(box_class_probs, axis=-1)classes = np.argmax(box_class_probs, axis=-1)_class_pos = np.where(class_max_score >= OBJ_THRESH)boxes = boxes[_class_pos]classes = classes[_class_pos]scores = (class_max_score* box_confidences)[_class_pos]return boxes, classes, scoresdef nms_boxes(boxes, scores):"""Suppress non-maximal boxes.# Argumentsboxes: ndarray, boxes of objects.scores: ndarray, scores of objects.# Returnskeep: ndarray, index of effective boxes."""x = boxes[:, 0]y = boxes[:, 1]w = boxes[:, 2] - boxes[:, 0]h = boxes[:, 3] - boxes[:, 1]areas = w * horder = scores.argsort()[::-1]keep = []while order.size > 0:i = order[0]keep.append(i)xx1 = np.maximum(x[i], x[order[1:]])yy1 = np.maximum(y[i], y[order[1:]])xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)inter = w1 * h1ovr = inter / (areas[i] + areas[order[1:]] - inter)inds = np.where(ovr <= NMS_THRESH)[0]order = order[inds + 1]keep = np.array(keep)return keepdef yolov5_post_process(input_data):masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]anchors = [[15,20], [20, 75], [28, 25], [31,136], [44,42],[53,215], [75,76], [98,421], [148,226]]#anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45],#[59, 119], [116, 90], [156, 198], [373, 326]]boxes, classes, scores = [], [], []for input, mask in zip(input_data, masks):b, c, s = process(input, mask, anchors)b, c, s = filter_boxes(b, c, s)boxes.append(b)classes.append(c)scores.append(s)boxes = np.concatenate(boxes)boxes = xywh2xyxy(boxes)classes = np.concatenate(classes)scores = np.concatenate(scores)nboxes, nclasses, nscores = [], [], []for c in set(classes):inds = np.where(classes == c)b = boxes[inds]c = classes[inds]s = scores[inds]keep = nms_boxes(b, s)nboxes.append(b[keep])nclasses.append(c[keep])nscores.append(s[keep])if not nclasses and not nscores:return None, None, Noneboxes = np.concatenate(nboxes)classes = np.concatenate(nclasses)scores = np.concatenate(nscores)return boxes, classes, scoresdef draw(image, boxes, scores, classes):"""Draw the boxes on the image.# Argument:image: original image.boxes: ndarray, boxes of objects.classes: ndarray, classes of objects.scores: ndarray, scores of objects.all_classes: all classes name."""for box, score, cl in zip(boxes, scores, classes):top, left, right, bottom = boxprint('class: {}, score: {}'.format(CLASSES[cl], score))print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(top, left, right, bottom))top = int(top)left = int(left)right = int(right)bottom = int(bottom)cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 2)cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),(top, left - 6),cv2.FONT_HERSHEY_SIMPLEX,0.6, (0, 0, 255), 2)def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)if __name__ == '__main__':host_name = get_host()rknn_model = RK3588_RKNN_MODELrknn_lite = RKNNLite()# load RKNN modelprint('--> Load RKNN model')ret = rknn_lite.load_rknn(rknn_model)if ret != 0:print('Load RKNN model failed')exit(ret)print('done')#####ori_img = cv2.imread('./bus.jpg')######img = cv2.cvtColor(ori_img, cv2.COLOR_BGR2RGB)# init runtime environmentprint('--> Init runtime environment')# run on RK356x/RK3588 with Debian OS, do not need specify target.ret = rknn_lite.init_runtime(core_mask=RKNNLite.NPU_CORE_0)if ret != 0:print('Init runtime environment failed')exit(ret)print('done')# Set inputsimg = cv2.imread(IMG_PATH)img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE))img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)img = cv2.resize(img, (IMG_SIZE, IMG_SIZE))# Inferenceprint('--> Running model')outputs = rknn_lite.inference(inputs=[img])#np.save('./onnx_yolov5_0.npy', outputs[0])#np.save('./onnx_yolov5_1.npy', outputs[1])#np.save('./onnx_yolov5_2.npy', outputs[2])print('done')# post processinput0_data = outputs[0]input1_data = outputs[1]input2_data = outputs[2]input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))input_data = list()input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))boxes, classes, scores = yolov5_post_process(input_data)img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)if boxes is not None:draw(img_1, boxes, scores, classes)cv2.imwrite('result.jpg', img_1)rknn_lite.release()代码运行结果如下:

这里没有出车,是我训练的模型问题。
大家对以上代码是不是很熟悉,其实这部分代码的很多函数都是将onnx文件转换为rknn文件的代码,只是把它的from rknn.api import RKNN修改为from rknnlite.api import RKNNLite,并且将载入rknn模型的内容修改即可,数据的处理完全没变。
用这个代码的好处是,我们以后对相机进行检测目标时,只需要下载一次rknn模型,后续只需要处理图片即可。
二、下面再结合lidar数据的获取,我们可以同时获取雷达数据和检测rknn模型,代码如下:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# coding:utf-8
import cv2import rospy
from sensor_msgs.msg import PointCloud2
import sensor_msgs.point_cloud2 as pc2
from std_msgs.msg import Header
from visualization_msgs.msg import Marker, MarkerArray
from geometry_msgs.msg import Point#import torch
import numpy as np
import sys
import time,datetime
print(sys.version)
#from recon_barriers_model import recon_barriers
#from pclpy import pcl
from queue import Queue
import open3d as o3dimport matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
#%matplotlib#from create_date_file import data_time
import threading
import time,datetime
import os#先初始化ros,再from rknnlite.api import RKNNLite,否则会报错
rospy.init_node('lidar_node')import os
import urllib
import traceback
import sys
import numpy as np
import platform
from rknnlite.api import RKNNLite
from PIL import Image#######################################################################################################
#1.==================================rknn模型检测=====================================================#
#######################################################################################################QUANTIZE_ON = True
BOX_THRESH = 0.5
OBJ_THRESH = 0.45
NMS_THRESH = 0.65
IMG_SIZE = 640CLASSES = ("car", "moto", "persons")# decice tree for rk356x/rk3588
DEVICE_COMPATIBLE_NODE = '/proc/device-tree/compatible'def get_host():# get platform and device typesystem = platform.system()machine = platform.machine()os_machine = system + '-' + machineif os_machine == 'Linux-aarch64':try:with open(DEVICE_COMPATIBLE_NODE) as f:device_compatible_str = f.read()host = 'RK3588'except IOError:print('Read device node {} failed.'.format(DEVICE_COMPATIBLE_NODE))exit(-1)else:host = os_machinereturn hostINPUT_SIZE = 640RK3588_RKNN_MODEL = 'best.rknn'def sigmoid(x):return 1 / (1 + np.exp(-x))def xywh2xyxy(x):# Convert [x, y, w, h] to [x1, y1, x2, y2]y = np.copy(x)y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left xy[:, 1] = x[:, 1] - x[:, 3] / 2 # top left yy[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right xy[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right yreturn ydef process(input, mask, anchors):anchors = [anchors[i] for i in mask]grid_h, grid_w = map(int, input.shape[0:2])box_confidence = sigmoid(input[..., 4])box_confidence = np.expand_dims(box_confidence, axis=-1)box_class_probs = sigmoid(input[..., 5:])box_xy = sigmoid(input[..., :2]) * 2 - 0.5col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)grid = np.concatenate((col, row), axis=-1)box_xy += gridbox_xy *= int(IMG_SIZE/grid_h)box_wh = pow(sigmoid(input[..., 2:4]) * 2, 2)box_wh = box_wh * anchorsbox = np.concatenate((box_xy, box_wh), axis=-1)return box, box_confidence, box_class_probsdef filter_boxes(boxes, box_confidences, box_class_probs):"""Filter boxes with box threshold. It's a bit different with origin yolov5 post process!# Argumentsboxes: ndarray, boxes of objects.box_confidences: ndarray, confidences of objects.box_class_probs: ndarray, class_probs of objects.# Returnsboxes: ndarray, filtered boxes.classes: ndarray, classes for boxes.scores: ndarray, scores for boxes."""boxes = boxes.reshape(-1, 4)box_confidences = box_confidences.reshape(-1)box_class_probs = box_class_probs.reshape(-1, box_class_probs.shape[-1])_box_pos = np.where(box_confidences >= OBJ_THRESH)boxes = boxes[_box_pos]box_confidences = box_confidences[_box_pos]box_class_probs = box_class_probs[_box_pos]class_max_score = np.max(box_class_probs, axis=-1)classes = np.argmax(box_class_probs, axis=-1)_class_pos = np.where(class_max_score >= OBJ_THRESH)boxes = boxes[_class_pos]classes = classes[_class_pos]scores = (class_max_score* box_confidences)[_class_pos]return boxes, classes, scoresdef nms_boxes(boxes, scores):"""Suppress non-maximal boxes.# Argumentsboxes: ndarray, boxes of objects.scores: ndarray, scores of objects.# Returnskeep: ndarray, index of effective boxes."""x = boxes[:, 0]y = boxes[:, 1]w = boxes[:, 2] - boxes[:, 0]h = boxes[:, 3] - boxes[:, 1]areas = w * horder = scores.argsort()[::-1]keep = []while order.size > 0:i = order[0]keep.append(i)xx1 = np.maximum(x[i], x[order[1:]])yy1 = np.maximum(y[i], y[order[1:]])xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)inter = w1 * h1ovr = inter / (areas[i] + areas[order[1:]] - inter)inds = np.where(ovr <= NMS_THRESH)[0]order = order[inds + 1]keep = np.array(keep)return keepdef yolov5_post_process(input_data):masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]anchors = [[15,20], [20, 75], [28, 25], [31,136], [44,42],[53,215], [75,76], [98,421], [148,226]]#anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45],#[59, 119], [116, 90], [156, 198], [373, 326]]boxes, classes, scores = [], [], []for input, mask in zip(input_data, masks):b, c, s = process(input, mask, anchors)b, c, s = filter_boxes(b, c, s)boxes.append(b)classes.append(c)scores.append(s)boxes = np.concatenate(boxes)boxes = xywh2xyxy(boxes)classes = np.concatenate(classes)scores = np.concatenate(scores)nboxes, nclasses, nscores = [], [], []for c in set(classes):inds = np.where(classes == c)b = boxes[inds]c = classes[inds]s = scores[inds]keep = nms_boxes(b, s)nboxes.append(b[keep])nclasses.append(c[keep])nscores.append(s[keep])if not nclasses and not nscores:return None, None, Noneboxes = np.concatenate(nboxes)classes = np.concatenate(nclasses)scores = np.concatenate(nscores)return boxes, classes, scoresdef draw(image, boxes, scores, classes):"""Draw the boxes on the image.# Argument:image: original image.boxes: ndarray, boxes of objects.classes: ndarray, classes of objects.scores: ndarray, scores of objects.all_classes: all classes name."""for box, score, cl in zip(boxes, scores, classes):top, left, right, bottom = boxprint('class: {}, score: {}'.format(CLASSES[cl], score))print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(top, left, right, bottom))top = int(top)left = int(left)right = int(right)bottom = int(bottom)cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 2)cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),(top, left - 6),cv2.FONT_HERSHEY_SIMPLEX,0.6, (0, 0, 255), 2)def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)host_name = get_host()
rknn_model = RK3588_RKNN_MODELrknn_lite = RKNNLite()# load RKNN model
print('--> Load RKNN model')
ret = rknn_lite.load_rknn(rknn_model)
if ret != 0:print('Load RKNN model failed')exit(ret)
print('done')# init runtime environment
print('--> Init runtime environment')# run on RK356x/RK3588 with Debian OS, do not need specify target.
ret = rknn_lite.init_runtime(core_mask=RKNNLite.NPU_CORE_0)
if ret != 0:print('Init runtime environment failed')exit(ret)
print('done')#######################################################################################################
#1.==================================rknn模型检测=====================================================#
##############################################################################################################################################################################################################
#2.==================================雷达数据获取=====================================================#
########################################################################################################2.打开相机
cap = cv2.VideoCapture("/dev/video61")#1.根据时间自动创建文件夹
def data_time(root_path="img_lidar_save/"):# 1.鑾峰彇褰撳墠鏃堕棿瀛楃涓叉垨鏃堕棿鎴筹紙閮藉彲绮剧‘鍒板井绉掞級start_time=datetime.datetime.now().strftime(f'%Y-%m-%d %H:%M:%S{r".%f"}')times=start_time.split(" ")# 2.data_files锛氭牴鎹棩鏈熻幏鍙栬鍒涘缓鐨勬枃浠跺す鍚嶇О锛屾瘮濡備粖澶╂槸2023_12_07data_files=times[0]#3.鑾峰彇鏂囦欢澶硅矾寰勶細img_lidar_save/2023_12_07file_path=root_path+data_filescamera_file = file_path + "/" + "camera_data"lidar_file = file_path + "/" + "lidar_data"#4.濡傛灉浠婂ぉ杩樻病鏈夋枃浠跺す锛屽垯鍒涘缓鏂囦欢澶?鏂囦欢澶瑰悕绉颁负 2023_12_07if not os.path.exists(file_path):os.makedirs(file_path)#5.寤虹珛camera鍜宭idar鏂囦欢澶癸紝瀛樺彇鍚勮嚜鐨勬暟鎹?if not os.path.exists(camera_file):os.makedirs(camera_file)if not os.path.exists(lidar_file):os.makedirs(lidar_file)#6.寤虹珛鍚勮嚜鐨勫瓨鍙栧浘鐗囧拰瑙嗛鐨勬枃浠跺すimg_file=camera_file+ "/" +"image"vedios=camera_file+ "/" +"vedios"lidar_videos=lidar_file +"/" +"vedios"lidar_pcd=lidar_file +"/" +"image"if not os.path.exists(img_file):os.makedirs(img_file)if not os.path.exists(vedios):os.makedirs(vedios)if not os.path.exists(lidar_videos):os.makedirs(lidar_videos)if not os.path.exists(lidar_pcd):os.makedirs(lidar_pcd)return img_file,vedios,lidar_videos,lidar_pcd#1.聚类的数据处理
def cluster(points, radius=0.2):"""points: pointcloudradius: max cluster range"""items = []while len(points)>1:item = np.array([points[0]])base = points[0]points = np.delete(points, 0, 0)distance = (points[:,0]-base[0])**2+(points[:,1]-base[1])**2+(points[:,2]-base[2])**2infected_points = np.where(distance <= radius**2)item = np.append(item, points[infected_points], axis=0)border_points = points[infected_points]points = np.delete(points, infected_points, 0)while len(border_points) > 0:border_base = border_points[0]border_points = np.delete(border_points, 0, 0)border_distance = (points[:,0]-border_base[0])**2+(points[:,1]-border_base[1])**2border_infected_points = np.where(border_distance <= radius**2)item = np.append(item, points[border_infected_points], axis=0)border_points = points[border_infected_points]points = np.delete(points, border_infected_points, 0)items.append(item)return items#2.保存点云
def save_pointcloud(pointcloud_np, file_name="pointcloud.pcd"):point_cloud_o3d = o3d.geometry.PointCloud()point_cloud_o3d.points = o3d.utility.Vector3dVector(pointcloud_np[:, 0:3])o3d.io.write_point_cloud(file_name, point_cloud_o3d, write_ascii=False, compressed=True)#3.点云数据的处理
def lidars(msg,pcd_path):#4.点云数据的获取pcl_msg = pc2.read_points(msg, skip_nans=False, field_names=("x", "y", "z", "intensity","ring"))#5.点云数据的过滤np_p_2 = np.array(list(pcl_msg), dtype=np.float32)#print(np_p_2)#6.将过滤后的点云数据保存为pcd文件#print(pcd_path)save_pointcloud(np_p_2, file_name=pcd_path)#7.根据条件过滤点云数据ss=np.where([s[0]>2 and s[1]<3 and s[-1]>-3 and s[2]>-0.5 for s in np_p_2])ans=np_p_2[ss]#8.点云的聚类算法 item=cluster(ans, radius=0.2)m_item=[]#9.求每个类的均值,之后与目标进行匹配#hh=np.where([s.shape[0]>20 for s in item])#print("//",len(hh),len(item))for items in item:#print("..............",items.shape)#x,y,z=int(items[:,:1].sum().mean()) x,y,z,r=items[:,:1].mean(),items[:,1:2].mean(),items[:,2:3].mean(),items[:,3:4].mean()m_item.append([x,y,z]) #4.相机图片数据的处理
def images(frame,jpg_path):#1.保存jpg文件cv2.imwrite(jpg_path,frame)#5.对相机图片和点云数据的汇总处理
def velo_callback(msg):#1.自动生成当天保存文件的文件夹及保存文件的路径#img_file:存放图片的路径(jpg或者png文件)#vedios:存放相机视频的路径(mp4文件)#lidar_videos:存放雷达视频的路径(bag文件)#lidar_pcd:存放点云数据的pcd文件的视频(pcd文件)img_file,vedios,lidar_videos,lidar_pcd=data_time(root_path="img_lidar_save/")vedio_time=day_time()vedio_path=vedios+"/"+vedio_time+".avi"lidar_path=lidar_videos+"/"+vedio_time+".bag"ret, frame = cap.read()frame = cv2.rotate(frame, 0, dst=None) # 视频是倒着的,要对视频进行两次90度的翻转frame = cv2.rotate(frame, 0, dst=None) # 视频是倒着的,要对视频进行两次90度的翻转########################################################################################################1.==================================rknn模型检测=====================================================########################################################################################################img, ratio, (dw, dh) = letterbox(frame, new_shape=(IMG_SIZE, IMG_SIZE))img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)img = cv2.resize(img, (IMG_SIZE, IMG_SIZE))# Inferenceprint('--> Running model')outputs = rknn_lite.inference(inputs=[img])#np.save('./onnx_yolov5_0.npy', outputs[0])#np.save('./onnx_yolov5_1.npy', outputs[1])#np.save('./onnx_yolov5_2.npy', outputs[2])print('done')# post processinput0_data = outputs[0]input1_data = outputs[1]input2_data = outputs[2]input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))input_data = list()input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))boxes, classes, scores = yolov5_post_process(input_data)img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)if boxes is not None:draw(img_1, boxes, scores, classes)cv2.imwrite('result.jpg', img_1)cv2.imshow("src_image", img_1)cv2.waitKey(1)########################################################################################################1.==================================rknn模型检测=====================================================#########################################################################################################显示视频#cv2.imshow("src_image", frame)#cv2.waitKey(1)#3.获取实时时间,作为保存jpg和pcd文件的名称now_time=day_time()print("------>",now_time)#4.获得存取pcd文件和jpg文件的路径pcd_path=lidar_pcd+"/"+now_time+".pcd"jpg_path=img_file+"/"+now_time+".jpg"#4.lidar和images数据的处理及保存,两个函数放在两个线程同时运行lidars(msg,pcd_path)#lidar数据的处理及保存images(frame,jpg_path)#images数据的处理及保存#根据时间给jpg和pcd文件命名
def day_time():start_time=datetime.datetime.now().strftime(f'%Y-%m-%d %H:%M:%S{r".%f"}')times=start_time.split(" ")mins=times[1].split(":")day_names=mins[0]+"_"+mins[1]+"_"+mins[2][:2]+"_"+mins[2][3:5]return day_namesif __name__ == '__main__':sub_ = rospy.Subscriber("livox/lidar", PointCloud2,velo_callback)print("ros_node has started!")rospy.spin()rknn_lite.release()注意,在该文件的同栏目需要建立一个文件夹 img_lidar_save,这个文件夹下面保存相机的jpg文件和pcd文件。效果如下:


以上是根据当天的实际时间自动保存的jig和pcd文件。下面是rknn模型检测的结果。

相关文章:
14. rk3588自带的RKNNLite检测yolo模型(python)
首先将文件夹~/rknpu2/runtime/RK3588/Linux/librknn_api/aarch64/下的文件librknnrt.so复制到文件夹/usr/lib/下(该文件夹下原有的文件librknnrt.so是用来测试resnet50模型的,所以要替换成yolo模型的librknnrt.so),如下图所示&am…...
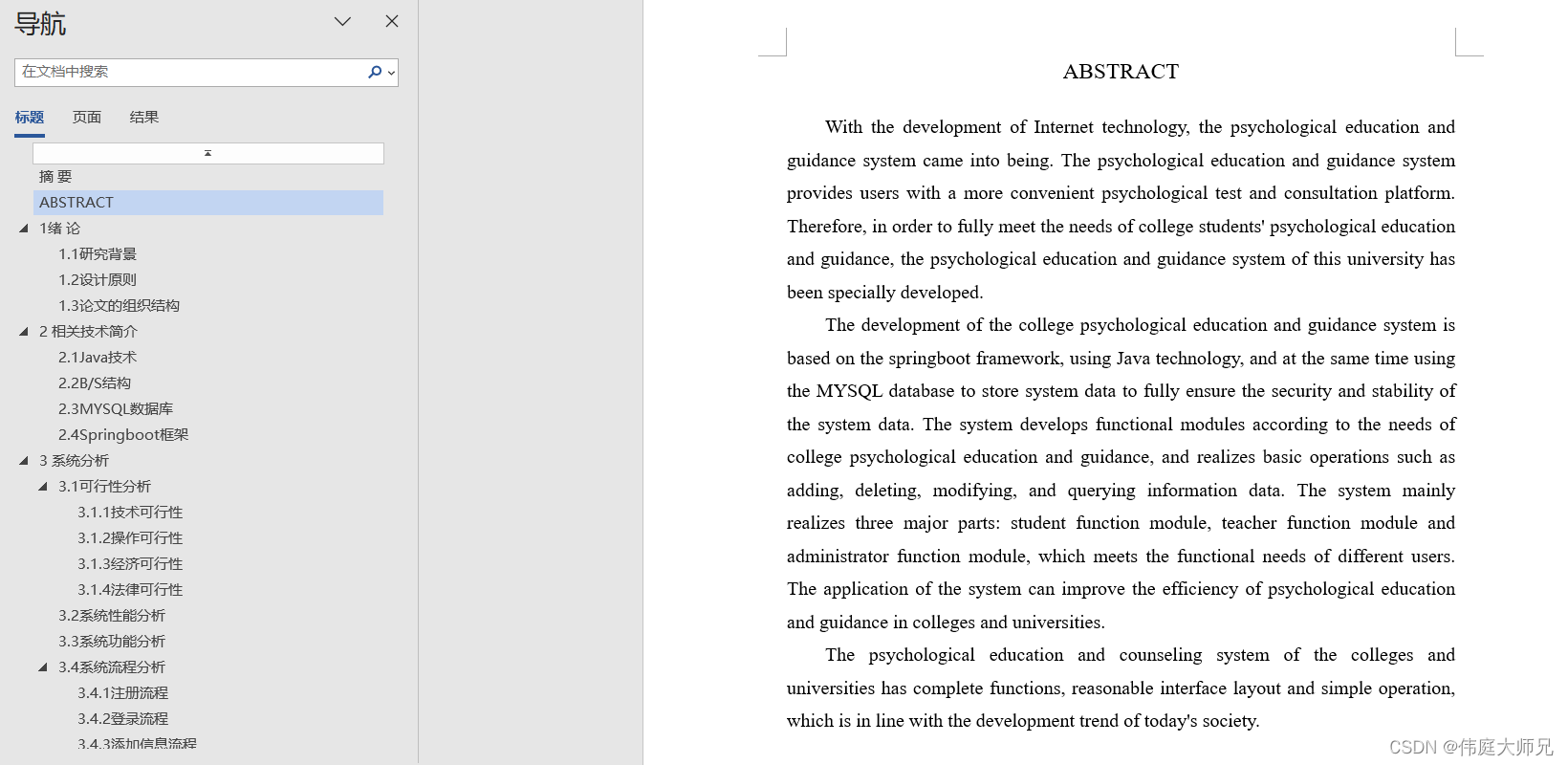
心理辅导|高校心理教育辅导系统|基于Springboot的高校心理教育辅导系统设计与实现(源码+数据库+文档)
高校心理教育辅导系统目录 目录 基于Springboot的高校心理教育辅导系统设计与实现 一、前言 二、系统功能设计 三、系统实现 1、学生功能模块的实现 (1)学生登录界面 (2)留言反馈界面 (3)试卷列表界…...
字符串方法挑战
题目 编写一个程序,接收一个使用下划线命名法(underscore_case)编写的变量名列表,并将它们转换为驼峰命名法(camelCase)。 输入将来自插入到DOM中的文本区域(请参见下面的代码)&…...

vivado FIR Filters
Vivado合成直接从RTL中推导出乘加级联来组成FIR滤波器。这种滤波器有几种可能的实现方式;一个例子是收缩滤波器在7系列DSP48E1 Slice用户指南(UG479)中进行了描述,并在8抽头偶数中显示对称收缩FIR(Verilog)…...

c# Contains方法-检查集合中是否包含指定的元素
Contains 是 .NET 集合框架中许多集合类(如 List、Array、HashSet 等)提供的一种方法,用于检查集合中是否包含指定的元素。对于 List<int> 类型,Contains 方法会遍历列表中的所有元素,并判断传入的方法参数是否存…...

【开源】在线办公系统 JAVA+Vue.js+SpringBoot+MySQL
目录 1 功能模块1.1 员工管理模块1.2 邮件管理模块1.3 人事档案模块1.4 公告管理模块 2 系统展示3 核心代码3.1 查询用户3.2 导入用户3.3 新增公告 4 免责声明 本文项目编号: T 001 。 \color{red}{本文项目编号:T001。} 本文项目编号:T001。…...
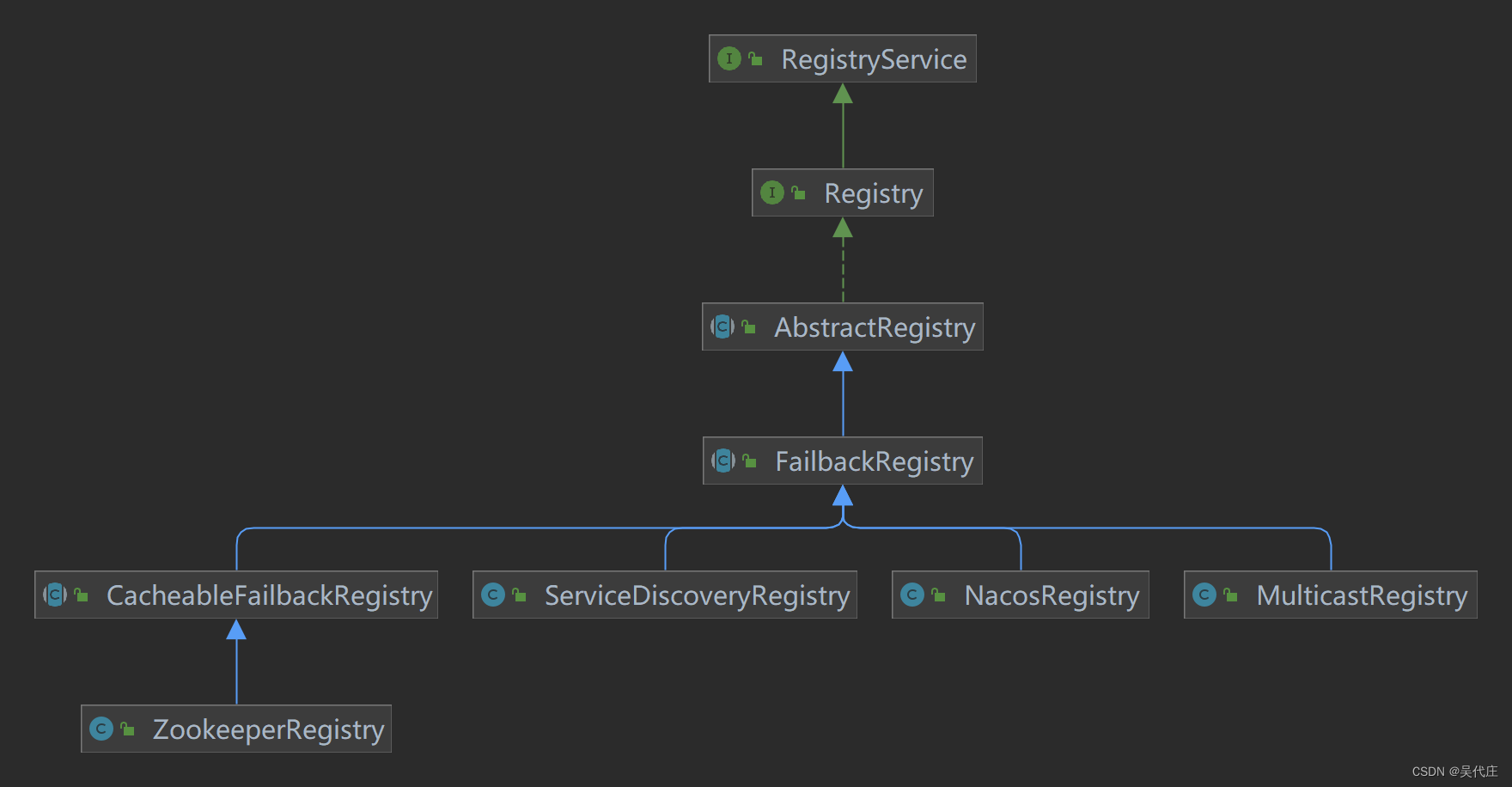
dubbo源码中设计模式——注册中心中工厂模式的应用
工厂模式的介绍 工厂模式提供了一种创建对象的方式,而无需指定要创建的具体类。 工厂模式属于创建型模式,它在创建对象时提供了一种封装机制,将实际创建对象的代码与使用代码分离。 应用场景:定义一个创建对象的接口࿰…...

T-Dongle-S3开发笔记——移植LVGL
添加lvgl组件 idf.py add-dependency lvgl/lvgl>8.* 新建终端执行命令后出现了新的文件: 清除再编译后才会出现lvgl库 优化为本地组件 以上方式修改了组件文件内容重新编译后文件又会变回去。 所以我们要把lvgl变成本地组件 1、要把 idf_component.yml 文…...

SOPHON算能科技新版SDK环境配置以及C++ demo使用过程
目录 1 SDK大包下载 2 获取SDK中的库文件和头文件 2.1 注意事项 2.2 交叉编译环境搭建 2.2.1 首先安装工具链 2.2.2 解压sophon-img包里的libsophon_soc__aarch64.tar.gz,将lib和include的所有内容拷贝到soc-sdk文件夹 2.2.3 解压sophon-mw包里的sophon-mw-s…...

Linux-SSH被攻击-解决方案
文章目录 一、检查攻击来源二、防范措施三、Fail2banfirewallcmd-ipset安装Fail2ban:安装firewalld:配置Fail2ban:配置firewalld以使用fail2ban:测试配置: SSH端口暴露在公网上很可能被黑客扫描,并尝试登入…...
)
第1章 计算机系统概述(2)
1.4操作系统结构 随着操作系统功能的不断增多和代码规模的不断变大,合理的操作系统结构,对于降低操作系统复杂度,提升操作系统安全与可靠性来说变得尤为重要。 分层法: 优点: 1.便于系统调试和验证,简化系统的设计和实现 2.易于扩充和维护 缺点: 1.合理定义各层较难(依赖关系比…...

【Java中23种设计模式-单例模式--饿汉式】
加油,新时代打工人! 简单粗暴,直接上代码。 23种设计模式定义介绍 Java中23种设计模式-单例模式 Java中23种设计模式-单例模式2–懒汉式线程不安全 Java中23种设计模式-单例模式2–懒汉式2线程安全 package mode;/*** author wenhao* dat…...
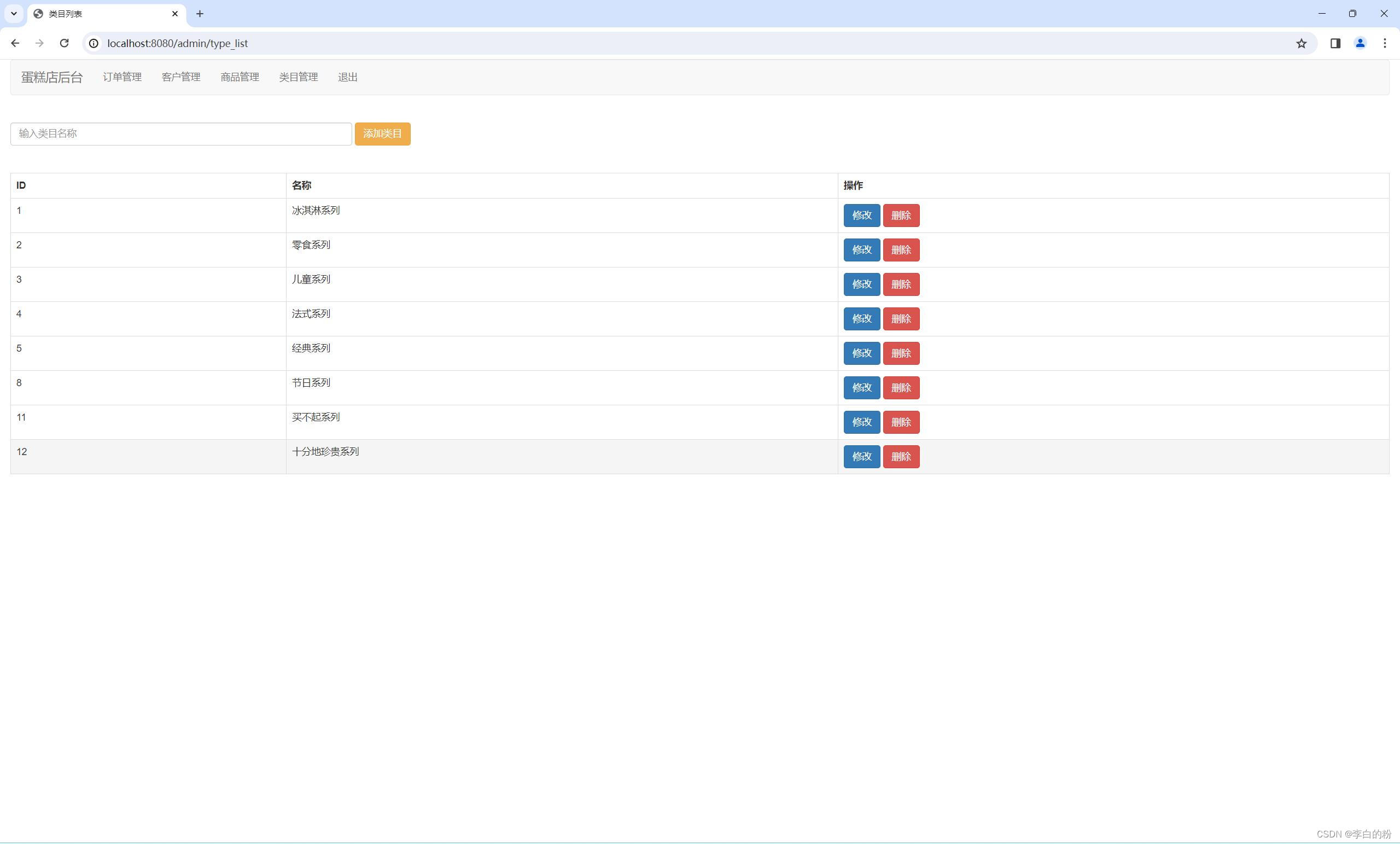
基于JavaWeb实现的在线蛋糕商城
一、系统架构 前端:jsp | bootstrap | js | css 后端:servlet | mybatis 环境:jdk1.7 | mysql | maven | tomcat 二、代码及数据库 三、功能介绍 01. web页-首页 02. web页-商品分类 03. web页-热销 04. web页-新品 05. w…...

【Pytorch】各种维度变换函数总结
维度变换千万不要混着用,尤其是交换维度的transpose和更改观察视角的view或者reshape!混用了以后虽然不会报错,但是数据是乱的, 建议用einops中的rearrange,符合人的直观,不容易出错。 一个例子: >>…...
typescript 泛型详解
typescript 泛型 泛型是可以在保证类型安全前提下,让函数等与多种类型一起工作,从而实现复用,常用于: 函数、接口、class中。 需求:创建一个id 函数,传入什么数据就返回该数据本身(也就是说,参数和返回值类型相同)。 …...

【Ubuntu内核】解决Ubuntu 20.04更新内核后无法联网的问题
最近在使用Ubuntu 20.04时,在更新内核后无法进行WiFi联网。我的电脑上装载的是AX211型号的无线网卡,之前安装了相应的驱动,并且一直正常使用。但不小心更新到了Linux 5.15.0-94-generic后,突然发现无法连接网络了。 于是首先怀疑…...
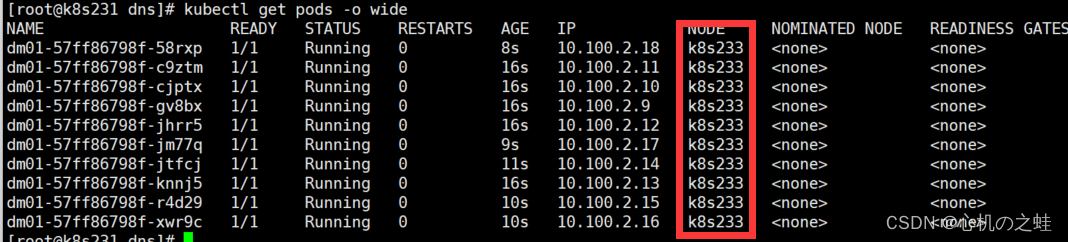
20-k8s中pod的调度-nodeSelector节点选择器
一、概念 我们先创建一个普通的deploy资源,设置为10个副本 [rootk8s231 dns]# cat deploy.yaml apiVersion: apps/v1 kind: Deployment metadata: name: dm01 spec: replicas: 10 selector: matchLabels: k8s: k8s template: metadata: …...
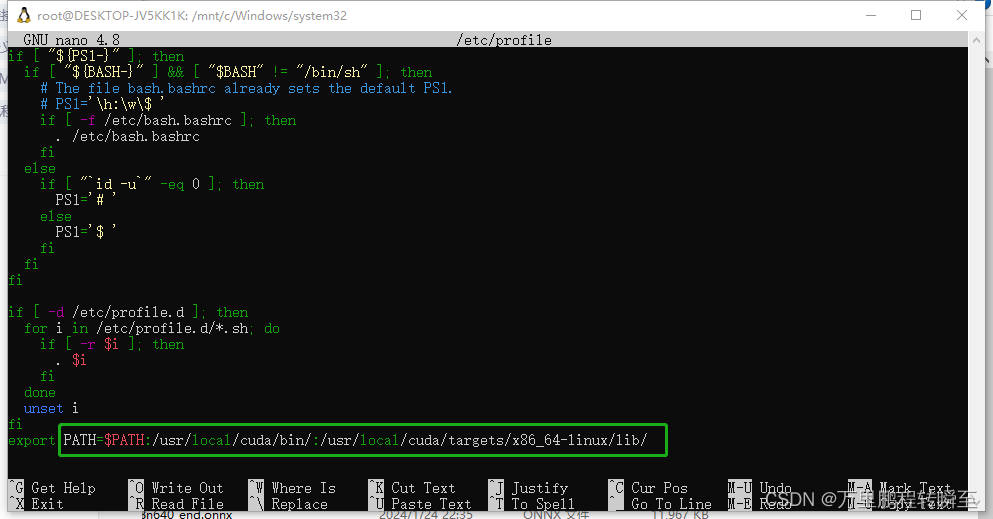
win10下wsl2使用记录(系统迁移到D盘、配置国内源、安装conda环境、配置pip源、安装pytorch-gpu环境、安装paddle-gpu环境)
wsl2 安装好后环境测试效果如下,支持命令nvidia-smi,不支持命令nvcc,usr/local目录下没有cuda文件夹。 系统迁移到非C盘 wsl安装的系统默认在c盘,为节省c盘空间进行迁移。 1、输出wsl -l 查看要迁移的系统名称 2、执行导出命…...
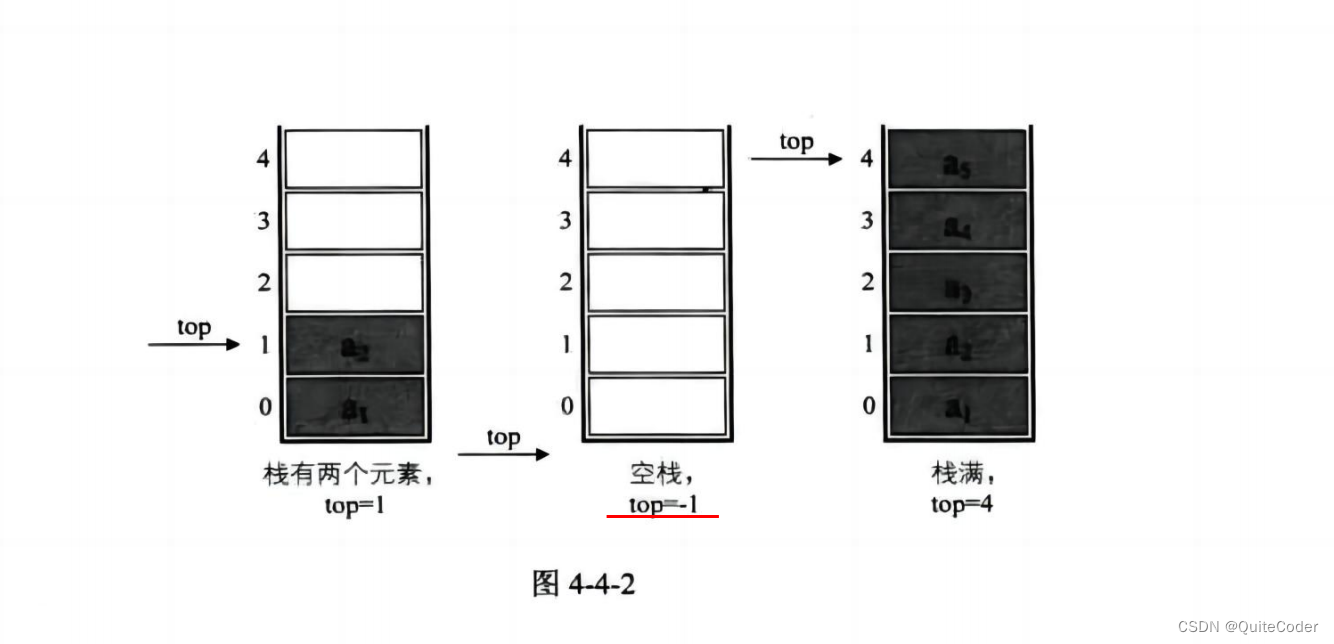
数据结构与算法:栈
朋友们大家好啊,在链表的讲解过后,我们本节内容来介绍一个特殊的线性表:栈,在讲解后也会以例题来加深对本节内容的理解 栈 栈的介绍栈进出栈的变化形式 栈的顺序存储结构的有关操作栈的结构定义与初始化压栈操作出栈操作获取栈顶元…...

Newtonsoft.Json设置忽略某些字段
using Newtonsoft.Json; using Newtonsoft.Json.Serialization; using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks;namespace TestProject1 {/// <summary>/// 输出json时,设置忽略哪些…...

提示词失效?双色调渲染偏色?深度解析Midjourney色彩空间转换机制,精准锁定sRGB→Lab双色域锚点
更多请点击: https://codechina.net 第一章:提示词失效?双色调渲染偏色?深度解析Midjourney色彩空间转换机制,精准锁定sRGB→Lab双色域锚点 当用户在Midjourney中输入高饱和度提示词(如“vibrant cyan neo…...

Midjourney景深模糊失效全解析,深度拆解--no参数干扰链、背景层剥离阈值及alpha通道注入技巧
更多请点击: https://intelliparadigm.com 第一章:Midjourney景深效果控制的底层逻辑与失效本质 Midjourney 并未提供原生的、参数化的景深(Depth of Field, DoF)控制机制。其所谓“景深效果”实为提示词引导下的隐式风格模仿&a…...

企业级微服务架构解决方案:Abp Vnext Pro框架的5大技术优势解析
企业级微服务架构解决方案:Abp Vnext Pro框架的5大技术优势解析 【免费下载链接】abp-vnext-pro Abp Vnext 的 Vue 实现版本 项目地址: https://gitcode.com/gh_mirrors/ab/abp-vnext-pro Abp Vnext Pro是一个基于ABP框架和Vue.js技术栈构建的企业级开发平台…...

毫米波高汇聚空馈天线技术【附方案】
✨ 长期致力于透射阵天线、高增益、宽角波束扫描、共形设计、近场赋形研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)低剖面透射阵天线设计ÿ…...

VM振弦采集模块精度实测:从标准信号源到误差分析全流程
1. 项目概述与核心价值最近在做一个岩土工程安全监测的项目,其中有个环节让我琢磨了好一阵子:如何准确地评估我们用的那批VM振弦采集模块的测量精度。这玩意儿在结构健康监测、桥梁隧道、边坡稳定性监测里用得非常多,核心任务就是读取振弦式传…...

6款优质降AIGC平台 降痕效果拉满
写论文时不断攀升的AIGC率让人焦虑不已?别担心,这里整理了6款高效实用的降AIGC工具,堪称应对AI痕迹问题的"得力助手"。它们能有效识别并消除AI生成特征,降痕能力出众,助你轻松通过查重审核,彻底摆…...

智慧无人机航拍巡检数据集 红外行人车辆识别数据集 行人车辆计数图像识别 红外建筑物识别 夜间低光环境下视觉感知算法 安防、交通等领域红外视觉任务 第10355期
深度学习数据集 README数据集核心信息总览维度详情数据类别目标检测类(建筑物、人们、车辆、路灯、通用物体、单个行人,共 6 类)数据数量图像样本共 60 张,包含训练、验证、测试所需的基础样本量数据集格式图像格式(支…...

性价比高的卫浴软件供应商
在卫浴行业数字化转型浪潮中,蓝猿BLUEAPE大力投入AI建设,其成果融入产品,为企业带来高效解决方案。降低成本,提升效率蓝猿云册多端同步,省略传统纸质画册印刷等环节,降低样品制作与分发成本,某卫…...

创业团队如何利用Taotoken统一技术栈并降低AI接入门槛
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 创业团队如何利用Taotoken统一技术栈并降低AI接入门槛 对于资源有限的创业团队而言,在产品中集成人工智能能力是提升竞…...
)
2026年主流一键生成论文工具全攻略(含免费额度说明)
以下是当前学术圈口碑 TOP 的6 款 AI 写论文工具,覆盖从选题、开题到降重、答辩的论文全流程,剔除冗余工具,每款均附分步骤实操指南场景适配技巧,重点突出中文论文适配性,新手也能快速上手,效率翻倍。一、全…...