具有精密内部基准的 DACx0502 简介及驱动应用示例
DACx0502 说明
16 位 DAC80502、14 位 DAC70502 和 12 位DAC60502 (DACx0502) 数模转换器 (DAC) 均为具有电压输出的高精度、低功耗器件。
DACx0502 线性度小于 1LSB。凭借高精度和微型封装特性,DACx0502 非常适合以下 应用: 增益和失调电压校准、电流或电压设置点设定和电源控制。这些器件包括一个 2.5V、5ppm/°C 内部基准,可提供 1.25V、2.5V 或 5V 的满量程输出电压范围。ACx0502 采用了上电复位电路,可确保 DAC 输出根据 RSTSEL 引脚的状态以零电平或中间电平上电,并在向器件写入有
效代码之前一直保持该电平。
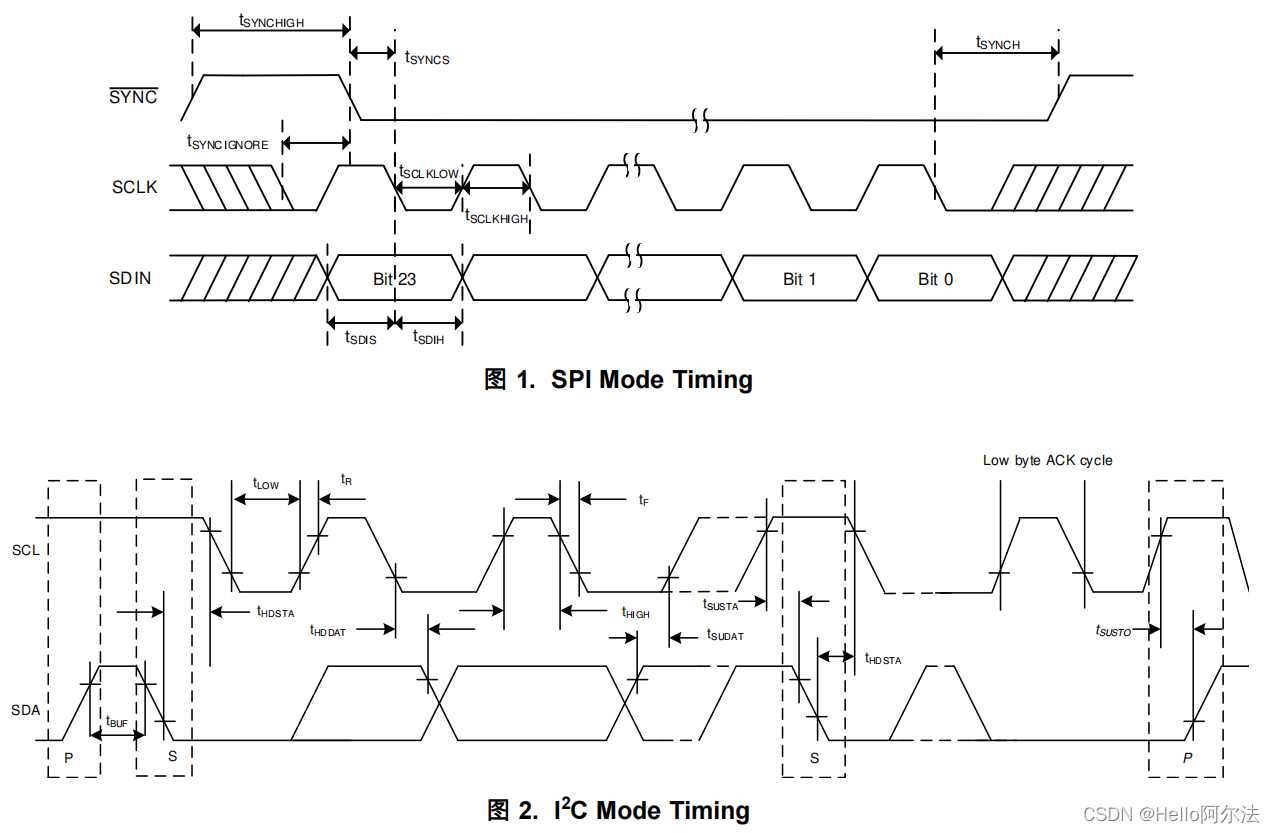
DACx0502 的数字接口可通过 SPI2C 引脚配置为 SPI或 I2C 模式。在 SPI 模式下,DACx0502 使用一个在高达 50MHz 的时钟频率下运行的通用 3 线制串行接口。在 I2C 模式下,DACx0502 支持标准 (100kbps)、快速 (400kbps) 和快速+ (1.0Mbps) 工作模式。
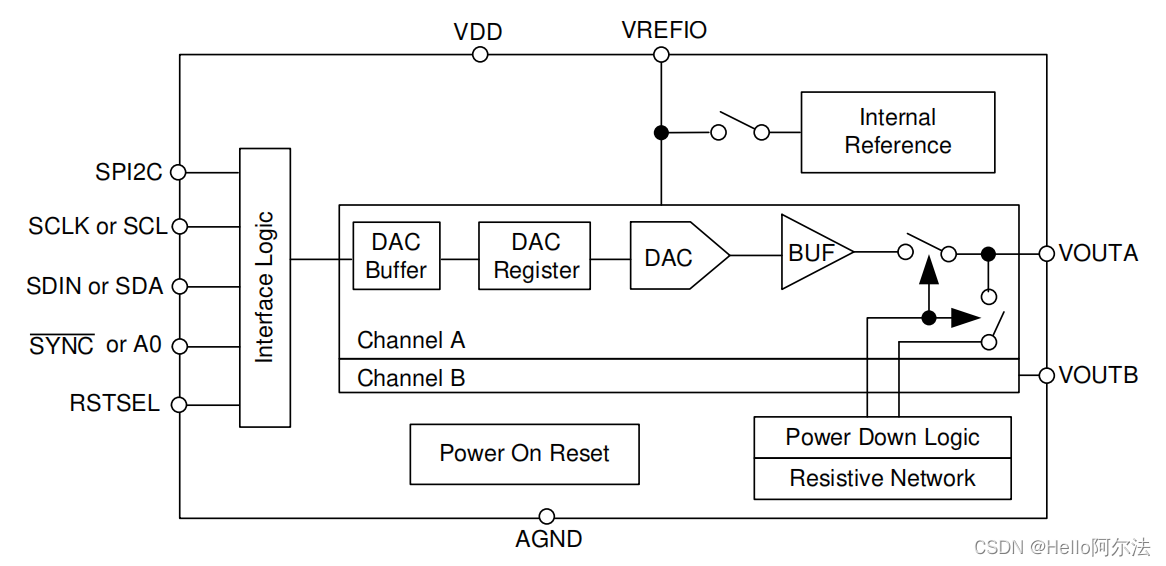
DACx0502 功能方框图
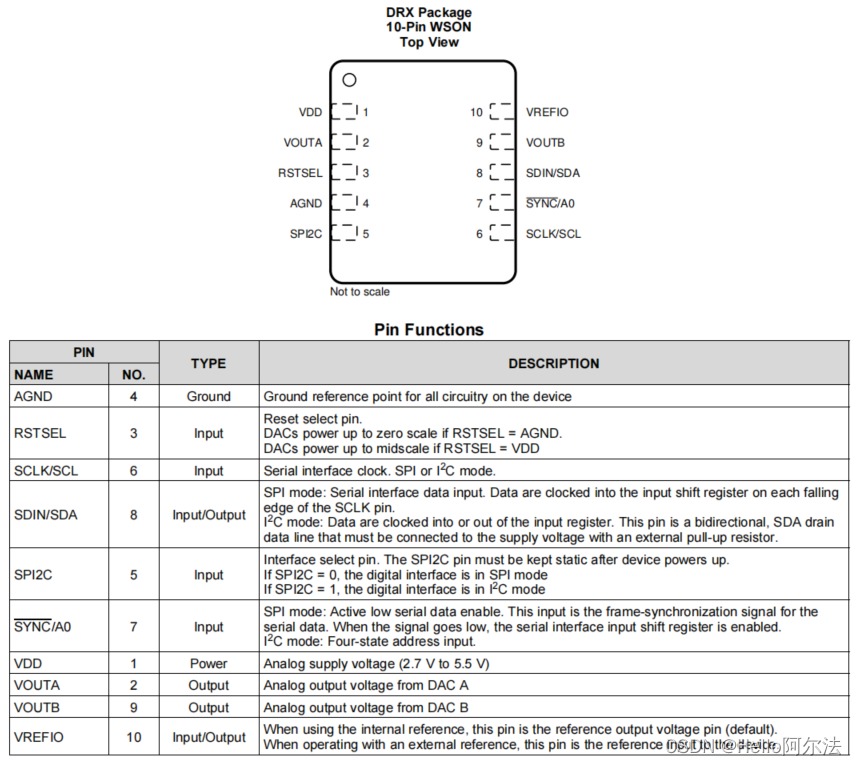
DACx0502 引脚配置和功能
DACx0502 驱动模式
- SPI 或 IIC
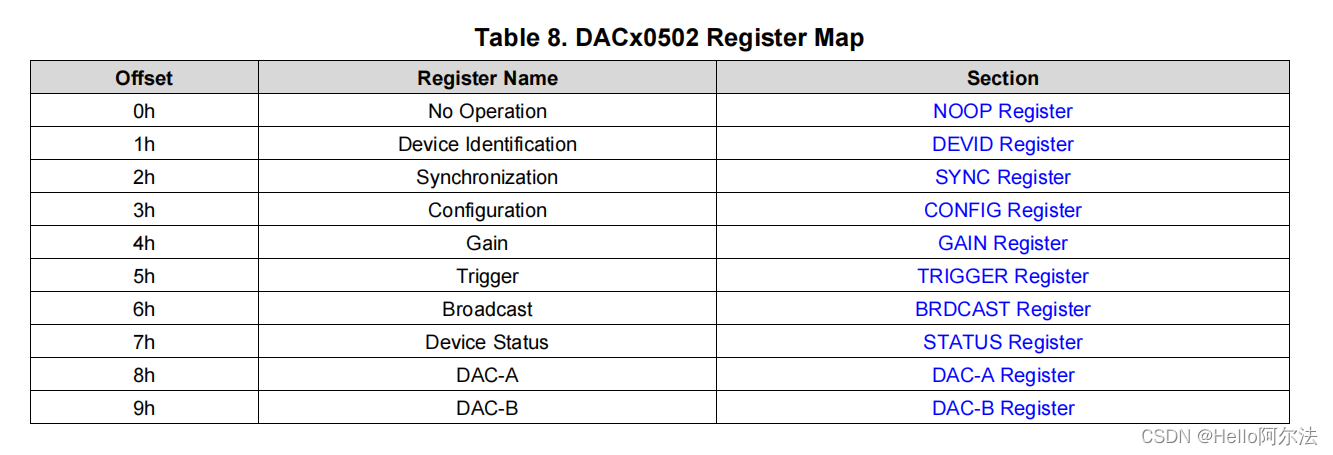
DACx0502 寄存器映射
测试平台
-
测试平台:STM32F103ZET6
-
测试芯片:DAC60502
驱动及应用示例
- myiic.c
#include "myiic.h"
#include "delay.h"// 初始化IIC
void IIC_Init(void)
{ RCC->APB2ENR|=1<<3;GPIOB->CRL&=0X00FFFFFF;GPIOB->CRL|=0X33000000; GPIOB->ODR|=3<<6;
}
// 产生IIC起始信号
void IIC_Start(void)
{SDA_OUT();IIC_SDA=1; IIC_SCL=1;delay_us(4);IIC_SDA=0;delay_us(4);IIC_SCL=0;
}
// 产生IIC停止信号
void IIC_Stop(void)
{SDA_OUT();IIC_SCL=0;IIC_SDA=0;delay_us(4);IIC_SCL=1; IIC_SDA=1;delay_us(4);
}
// 等待应答信号到来
// 返回值:1,接收应答失败
// 0,接收应答成功
uint8_t IIC_Wait_Ack(void)
{uint8_t ucErrTime=0;SDA_IN();IIC_SDA=1;delay_us(1); IIC_SCL=1;delay_us(1); while(READ_SDA){ucErrTime++;if(ucErrTime>250){IIC_Stop();return 1;}}IIC_SCL=0;return 0;
}
// 产生ACK应答
void IIC_Ack(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=0;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
// 不产生ACK应答
void IIC_NAck(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=1;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}
// IIC写一个字节
void IIC_Write_Byte(uint8_t txd)
{ uint8_t t; SDA_OUT(); IIC_SCL=0;for(t=0;t<8;t++){ IIC_SDA=(txd&0x80)>>7;txd<<=1; delay_us(2);IIC_SCL=1;delay_us(2); IIC_SCL=0; delay_us(2);}
}
// IIC读一个字节
// ack=1,发送ACK,
// ack=0,发送nACK
uint8_t IIC_Read_Byte(uint8_t ack)
{uint8_t i,receive=0;SDA_IN();for(i=0;i<8;i++ ){IIC_SCL=0; delay_us(2);IIC_SCL=1;receive<<=1;if(READ_SDA)receive++;delay_us(1); }if (!ack)IIC_NAck();elseIIC_Ack();return receive;
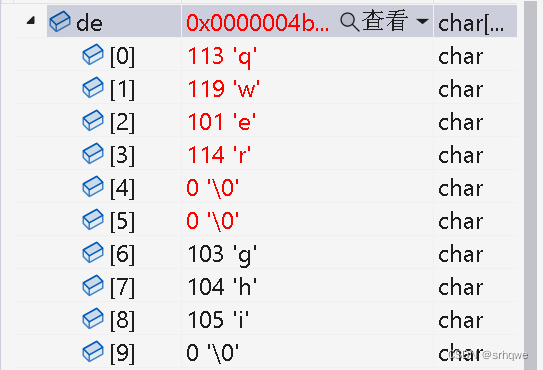
}void IIC_Write_UINT16(uint8_t dev_addr, uint8_t wr_addr, uint16_t data)
{IIC_Start();IIC_Write_Byte(dev_addr);IIC_Wait_Ack(); IIC_Write_Byte(wr_addr);IIC_Wait_Ack(); IIC_Write_Byte(data >> 8);IIC_Wait_Ack(); IIC_Write_Byte(data & 0xFF);IIC_Wait_Ack(); IIC_Stop();delay_ms(2);
}uint16_t IIC_Read_UINT16(uint8_t dev_addr, uint8_t rd_addr)
{uint16_t data;IIC_Start();IIC_Write_Byte(dev_addr);IIC_Wait_Ack();IIC_Write_Byte(rd_addr);IIC_Wait_Ack(); IIC_Start(); IIC_Write_Byte(dev_addr + 1);IIC_Wait_Ack();data = IIC_Read_Byte(1);data = (data <<8 ) + IIC_Read_Byte(0);IIC_Stop();return data;
}
- myiic.h
#ifndef __MYIIC_H__
#define __MYIIC_H__
#include "sys.h"//IO方向设置
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}//IO操作函数
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //输入SDA //IIC操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Write_Byte(uint8_t txd); //IIC发送一个字节
uint8_t IIC_Read_Byte(uint8_t ack); //IIC读取一个字节
uint8_t IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号void IIC_Write_UINT16(uint8_t dev_addr, uint8_t wr_addr, uint16_t data);
uint16_t IIC_Read_UINT16(uint8_t dev_addr, uint8_t rd_addr);#endif
- dacx0502.c
#include "dac60502.h"
#include "delay.h" //初始化IIC接口
int DAC60502_Init(void)
{IIC_Init();return 0;
}void DAC60502_Write(uint16_t WrAddr, uint16_t Data)
{IIC_Write_UINT16(DEV_ADDR, WrAddr, Data);
}uint16_t DAC60502_Read(uint16_t RdAddr)
{return IIC_Read_UINT16(DEV_ADDR, RdAddr);
}
- dac60502.h
#ifndef __DAC60502_H__
#define __DAC60502_H__
#include "myiic.h" #define DEV_ADDR 0x90#define NOOP 0x00
#define DEVID 0x01
#define SYNC 0x02
#define CONFIG 0x03
#define GAIN 0x04
#define TRIGGER 0x05
#define STATUS 0x06
#define DAC_A 0x08
#define DAC_B 0x09int DAC60502_Init(void);
void DAC60502_Write(uint16_t WrAddr, uint16_t Data);
uint16_t DAC60502_Read(uint16_t RdAddr);#endif
- main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "dac60502.h"
#include "usmart.h" int main(void)
{ uint16_t data = 0;Stm32_Clock_Init(9); //系统时钟设置uart_init(72,115200); //串口初始化为115200delay_init(72); //延时初始化 usmart_dev.init(72); //初始化USMART LED_Init(); //初始化与LED连接的硬件接口DAC60502_Init(); //IIC初始化 while(1){data = data + 0x1;if(data > 0x0fff)data = 0;DAC60502_Write(DAC_A,data << 4);printf("Write: %d \r\n", data);delay_ms(100);printf("Read: %d \r\n", DAC60502_Read(DAC_A) >> 4);delay_ms(100);LED0=!LED0;}return 0;
}
相关文章:
具有精密内部基准的 DACx0502 简介及驱动应用示例
DACx0502 说明 16 位 DAC80502、14 位 DAC70502 和 12 位DAC60502 (DACx0502) 数模转换器 (DAC) 均为具有电压输出的高精度、低功耗器件。 DACx0502 线性度小于 1LSB。凭借高精度和微型封装特性,DACx0502 非常适合以下 应用: 增益和失调电压校准、电流…...
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp()
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp() 在了解strncpy、strncat()、前,需要先了解strcpy()、strncat(): C语言函数:字符串函数及模拟实现strlen() 、strcpy()、 strcat()_srhqwe的博客-CSDN博客 strncp…...

学术论文插图要求简介
1. 类型 位图和矢量图是两种不同的图像类型,它们在存储和处理图像时使用不同的方法。以下是它们之间的详细区别: 图像构成方式:位图使用像素(或图像的最小单元)来构建图像,每个像素都有自己的颜色和亮度值。…...
)
【独家】华为OD机试 - 斗地主 2(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...

力扣-计算特殊奖金
大家好,我是空空star,本篇带大家了解一道简单的力扣sql练习题。 文章目录前言一、题目:1873. 计算特殊奖金二、解题1.正确示范①提交SQL运行结果2.正确示范②提交SQL运行结果3.正确示范③提交SQL运行结果4.正确示范④提交SQL运行结果5.其他总…...

华为校招机试真题目录
专栏介绍 本专栏将逐步收集历年华为校招算法真题 专栏权益 每篇博客都包含: 算法考点解析(文字+画图)算法源码(支持 Java / JS / Python)每晚9:00 ~ 11:00 在线答疑 真题目录 时间题目考点 or 实现2022.11.27...
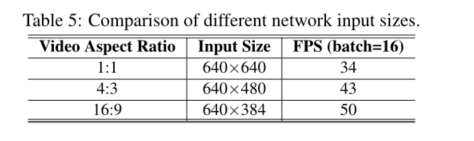
EdgeYOLO学习笔记
EdgeYOLO学习笔记 EdgeYOLO: An Edge-Real-Time Object Detector Abstract 本文基于最先进的YOLO框架,提出了一种高效、低复杂度、无锚的目标检测器,该检测器可以在边缘计算平台上实时实现。为了有效抑制训练过程中的过拟合,我们开发了一种…...

【分布式】什么是分布式锁?正文揭晓
分布式锁的概念 分布式锁其实可以理解为:控制分布式系统有序的去对共享资源进行操作,通过互斥来保持一致性。 举个例子:假设共享的资源就是一个房子,里面有各种书,分布式系统就是要进屋看书的人, 分布式锁…...

超详细JDK1.8所有版本下载地址
JDK1.8即为JDK8,JDK8是目前是最成熟最稳定的版本,本文将详细介绍JDK1.8历史版本的下载方式。 在此附上JDK1.8安装与配置教程 超详细JDK1.8安装与配置 一、JDK官网 首先打开oracle官网,官网首页地址为 JDK官网首页地址 点击Products 点击…...
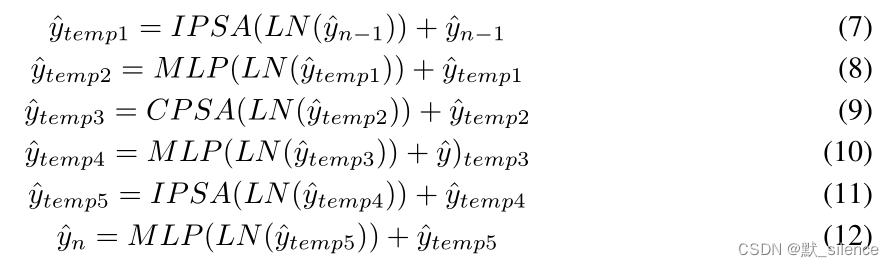
论文解析[11] CAT: Cross Attention in Vision Transformer
发表时间:2021 论文地址:https://arxiv.org/abs/2106.05786v1 文章目录摘要3 方法3.1 总体结构3.1.1 Inner-Patch Self-Attention Block3.1.2 Cross-Patch Self-Attention Block3.1.3 Cross Attention based Transformer结论摘要 使用图像patch来替换tr…...

嵌入式和Python(一):python环境搭建的详细步骤
目录 ● 安装python ① 更新软件列表 ② 安装编译python需要用到的环境 ③ 下载python源码 ④ 解压源码包 ⑤ 配置 ⑥ 编译 ⑦ 安装 ● 建立软连接 说明 ① 删除原来的软连接 ② 在/usr/bin/目录创建软连接python,定向/usr/local/bin/python3.9 ③ 检查…...
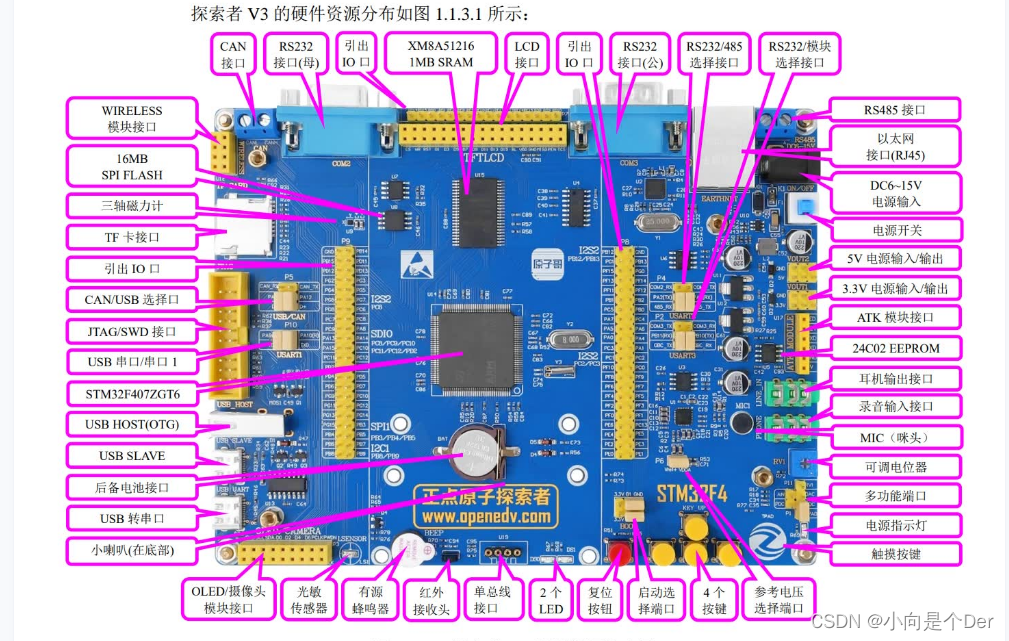
嵌入式学习笔记——STM32硬件基础知识
STM32开发硬件知识前言单片机参数主频位数STM32最小系统电源电路晶振电路复位电路BOOT选择电路调试接口电路其他电路本文重点本文参考博客链接前言 上一篇中我们重点是讲了一下怎么搭建开发环境以及怎么下载烧录的过程,这都是解决的电脑端的开发环境问题࿰…...
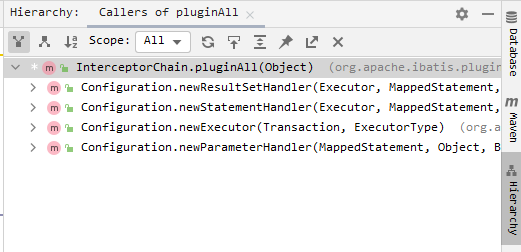
Mybatis插件开发及执行原理
mybatis源码下载 https://github.com/mybatis/mybatis-3,本文分析源码版本3.4.5 mybatis启动大致流程 在看这篇文章前,建议查看我另一篇文章,以了解框架启动的流程和框架中一些重要对象:https://blog.csdn.net/Aqu415/article/…...

vue父子组件通信,兄弟组件通信
目录 一、父子组件通信 1、子组件通过 props 获取父组件变量和父组件调用子组件中的方法(这两个都是父传子的思想) a:子组件通过 props 获取父组件变量 b:父组件调用子组件中的方法 2、父组件通过ref获取子组件变量和子组件调用父组件的方法(这两个都是子传父的…...
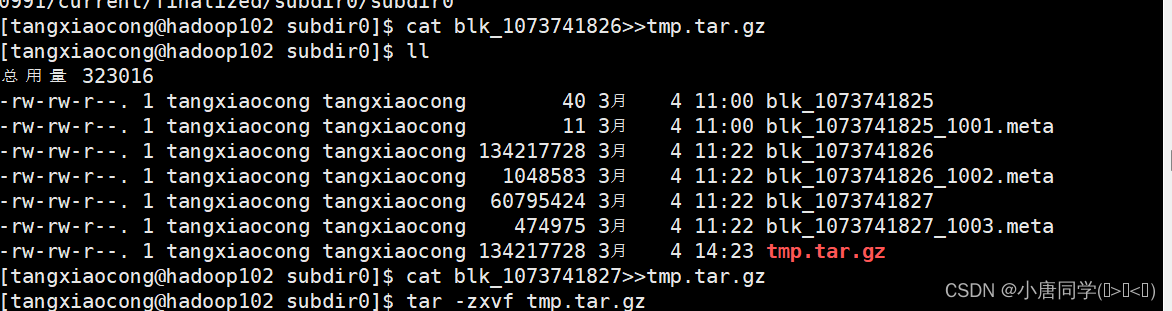
大数据技术之Hadoop集群配置
作者简介:大家好我是小唐同学(๑><๑),好久不见,为梦想而努力的小唐又回来了,让我们一起加油!!! 个人主页:小唐同学(๑><๑)的博客主页 目前…...
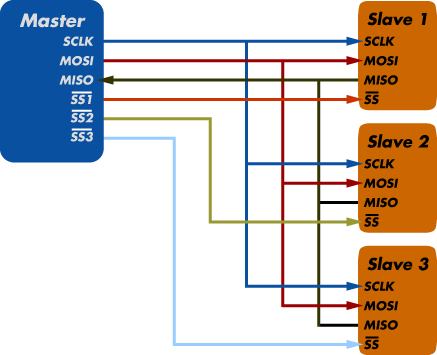
MicroBlaze系列教程(7):AXI_SPI的使用(M25P16)
文章目录 AXI_SPI简介MicroBlaze硬件配置常用函数使用示例波形实测参考资料工程下载本文是Xilinx MicroBlaze系列教程的第7篇文章。 AXI_SPI简介 Xilinx AXI-SPI IP共有两个:一个是标准的AXI_SPI,即4线制SPI,CS、SCLK、MOSI和MISO,另一个是AXI_Quad SPI,支持配置成标准SP…...

使用Python通过拉马努金公式快速求π
使用Python通过拉马努金公式快速求π 一、前言 π是一个数学常数,定义为:圆的周长与直径的比值。 π是一个无理数,也是一个超越数,它的小数部分无限不循环。 π可以用来精确计算圆周长、圆面积、球体积等几何形状的关键值。 有关…...

第六章 使用系统类提供国家语言支持 - 创建自定义语言环境
文章目录第六章 使用系统类提供国家语言支持 - 创建自定义语言环境创建自定义语言环境第六章 使用系统类提供国家语言支持 - 创建自定义语言环境 创建自定义语言环境 此示例将提供一个模板,用于使用自定义表创建自定义语言环境。自定义表将在 EBCDIC(美…...

「题解」解决二进制数中1的个数
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练 🔥座右铭:“不要等到什么都没有了,才下定决心去做” 🚀🚀🚀大家觉不错…...

泛型详解.
1 泛型的引入 问题:我们之前实现过的顺序表,只能保存 int 类型的元素,如果现在需要保存 指向 Person 类型对象的引用的顺序表,请问应该如何解决?如果又需要保存指向 Book 对象类型的引用呢? 之前写的顺序表…...

Intv_ai_mk11 流程图生成与解析:集成Visio实现架构设计智能辅助
Intv_ai_mk11 流程图生成与解析:集成Visio实现架构设计智能辅助 1. 场景痛点:传统架构设计的效率瓶颈 在系统架构设计和业务流程规划中,流程图是最常用的可视化工具之一。传统的工作流程通常是这样的:架构师先在脑海中构思设计&…...

黑丝空姐-造相Z-Turbo构建AI编程助手:自动生成前端组件配图
黑丝空姐-造相Z-Turbo构建AI编程助手:自动生成前端组件配图 想象一下这个场景:你正在为一个航空公司的内部管理系统编写前端代码,需要创建一个“机组人员资料卡”组件。你已经写好了HTML结构和CSS样式,但卡在了头像占位符上——是…...

RavenDB全文搜索与NGram分析器的实际应用
引言 在现代的数据库系统中,全文搜索功能已成为一个不可或缺的部分。RavenDB,作为一个强大的NoSQL数据库,提供了丰富的文本搜索功能。特别是通过使用NGram分析器,可以大大提升搜索的灵活性和准确性。本文将深入探讨RavenDB的全文搜索机制,特别是NGram分析器在索引和查询时…...

lychee-rerank-mm行业方案:文旅部门景区图片库按游客搜索词智能排序
Lychee-rerank-mm行业方案:文旅部门景区图片库按游客搜索词智能排序 1. 项目背景与价值 文旅部门的景区图片库通常包含成千上万张照片,从自然风光到人文景观,从特色建筑到文化活动。当游客通过搜索词查找图片时,如何快速找到最相…...
Pixel Dream Workshop 创意激发:利用算法生成无限可能的艺术图案与纹理
Pixel Dream Workshop 创意激发:利用算法生成无限可能的艺术图案与纹理 1. 当算法遇见艺术:数字创作的新纪元 在传统艺术创作中,设计师们常常需要花费大量时间手工绘制图案和纹理。而如今,Pixel Dream Workshop的出现彻底改变了…...

编写程序实现智能乐器音准检测偏差时,提示“需要调音”,新手也能调好音。
1. 实际应用场景描述场景:一名吉他初学者刚刚买回一把新吉他,或者在干燥天气后琴弦音准发生了偏移。他不知道电子调音表如何使用,也不具备绝对音感。本系统功能:用户拨动琴弦(例如第 6 弦 E2),电…...

Qwen3-VL-8B-Instruct-GGUF实战:上传图片秒懂内容,智能问答体验分享
Qwen3-VL-8B-Instruct-GGUF实战:上传图片秒懂内容,智能问答体验分享 1. 模型概述与核心优势 Qwen3-VL-8B-Instruct-GGUF是阿里通义最新推出的中量级多模态模型,它最大的特点可以用一句话概括:用8B参数实现72B级别的视觉语言理解…...

DeepSeek-R1-Distill-Llama-8B行业落地:金融研报初稿生成与合规性校验辅助应用实践
DeepSeek-R1-Distill-Llama-8B行业落地:金融研报初稿生成与合规性校验辅助应用实践 1. 引言:金融分析师的新助手 如果你在金融行业工作,每天都要写各种研究报告,那你一定知道这个过程有多耗时耗力。从收集数据、分析趋势&#x…...
星耀玩机技巧)
机械革命(MECHREUO)星耀玩机技巧
BIOS快捷键开机按F2FN健常锁FnEsc...

企业应如何将SEO和SEM结合起来
SEO和SEM的定义及其重要性 在当前数字化时代,企业在网络上的可见度直接影响其市场竞争力。两种重要的营销手段——搜索引擎优化(SEO)和搜索引擎营销(SEM)——各自发挥着独特的作用。SEO通过优化网站内容和结构&#x…...