stm32——hal库学习笔记(定时器)
这里写目录标题
- 一、定时器概述(了解)
- 1.1,软件定时原理
- 1.2,定时器定时原理
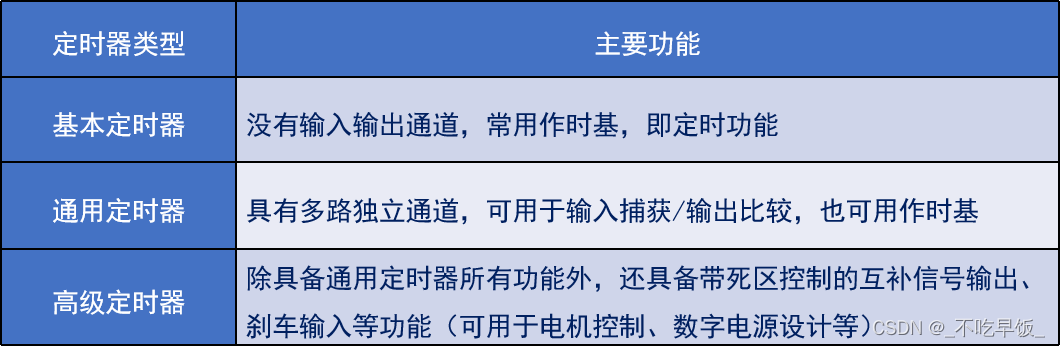
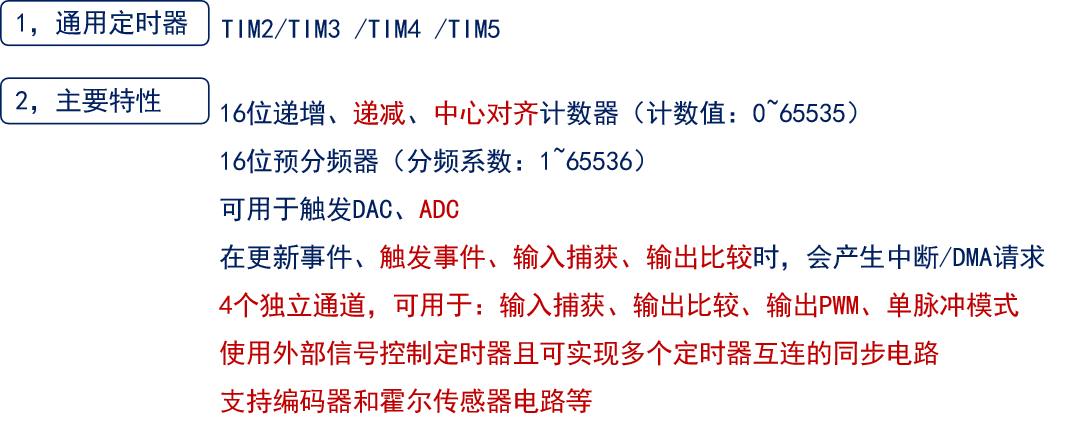
- 1.3,STM32定时器分类
- 1.4,STM32定时器特性表
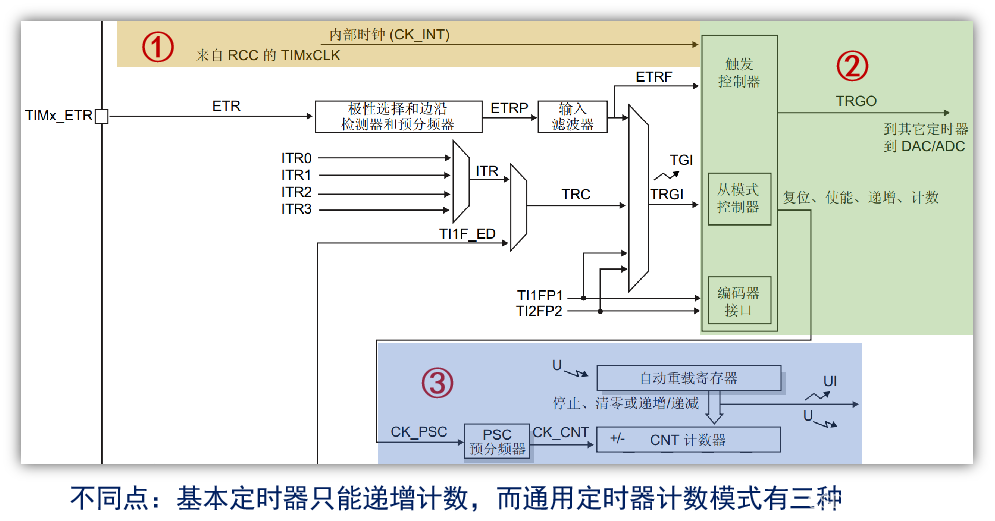
- 1.5,STM32基本、通用、高级定时器的功能整体区别
- 二、基本定时器(掌握)
- 2.1,基本定时器简介(了解)
- 2.2,基本定时器框图(熟悉)
- 2.3,定时器计数模式及溢出条件(熟悉)
- 2.4,定时器中断实验相关寄存器(了解)
- 2.5,定时器溢出时间计算方法(掌握)
- 2.6,定时器中断实验配置步骤(掌握)
- 2.7,编程实战:定时器中断实验(掌握)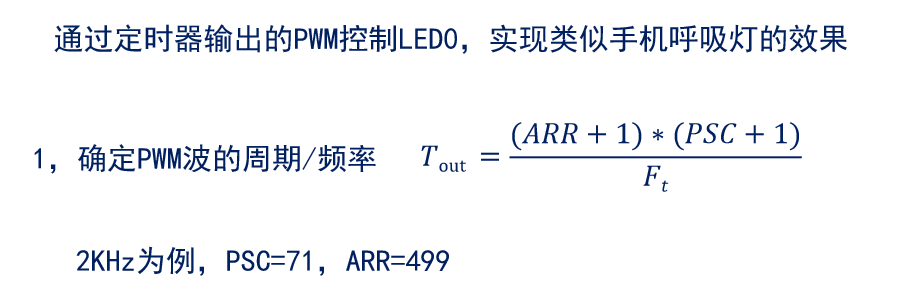
- 3.5,通用定时器输入捕获实验(掌握)
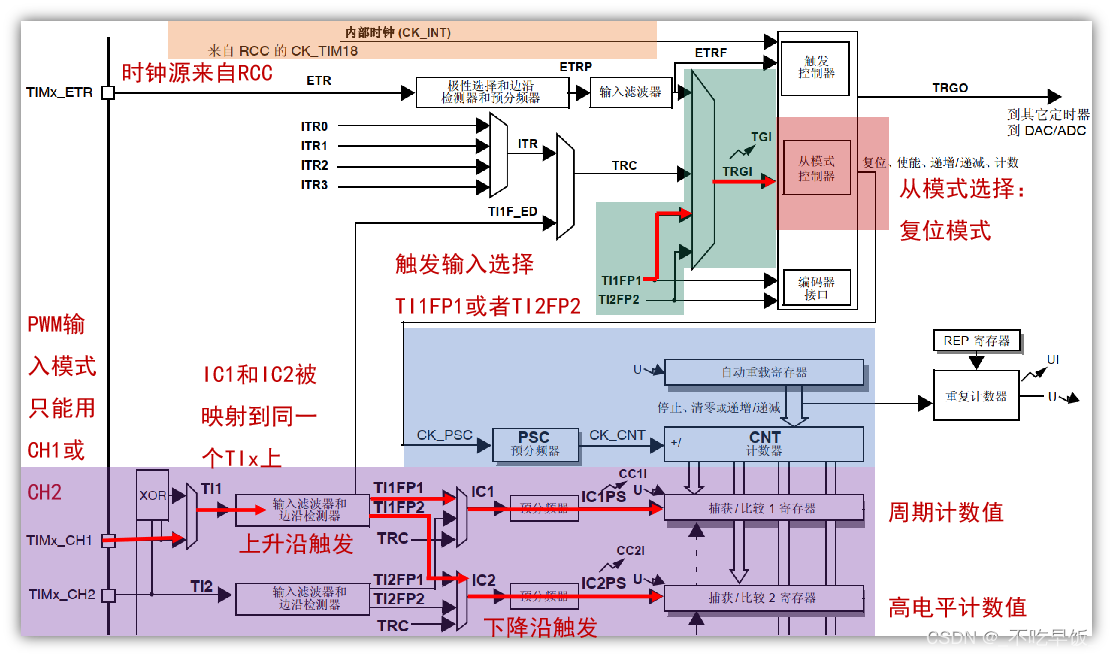
- 3.5.1,通用定时器输入捕获部分框图介绍(熟悉)
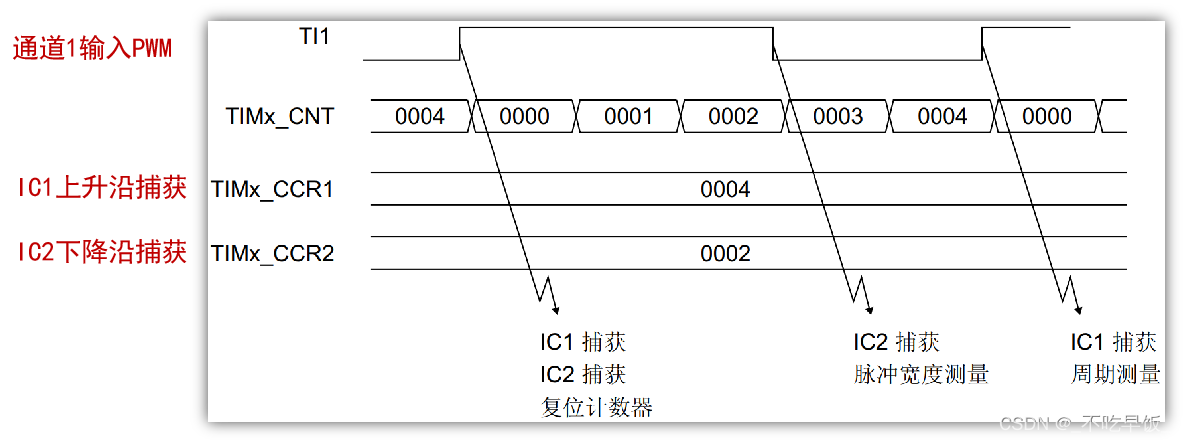
- 3.5.2,通用定时器输入捕获脉宽测量原理(掌握)
- 3.5.3,通用定时器输入捕获实验配置步骤(掌握)
- 3.5.4,编程实战:通用定时器输入捕获实验(掌握)
- 3.6,通用定时器脉冲计数实验(掌握)
- 3.6.1,脉冲计数实验原理(熟悉)
- 3.6.2,通用定时器脉冲计数实验配置步骤(掌握)
- 3.6.3,编程实战:通用定时器脉冲计数实验(掌握)
- 四、高级定时器(掌握)
- 4.1,高级定时器简介(了解)
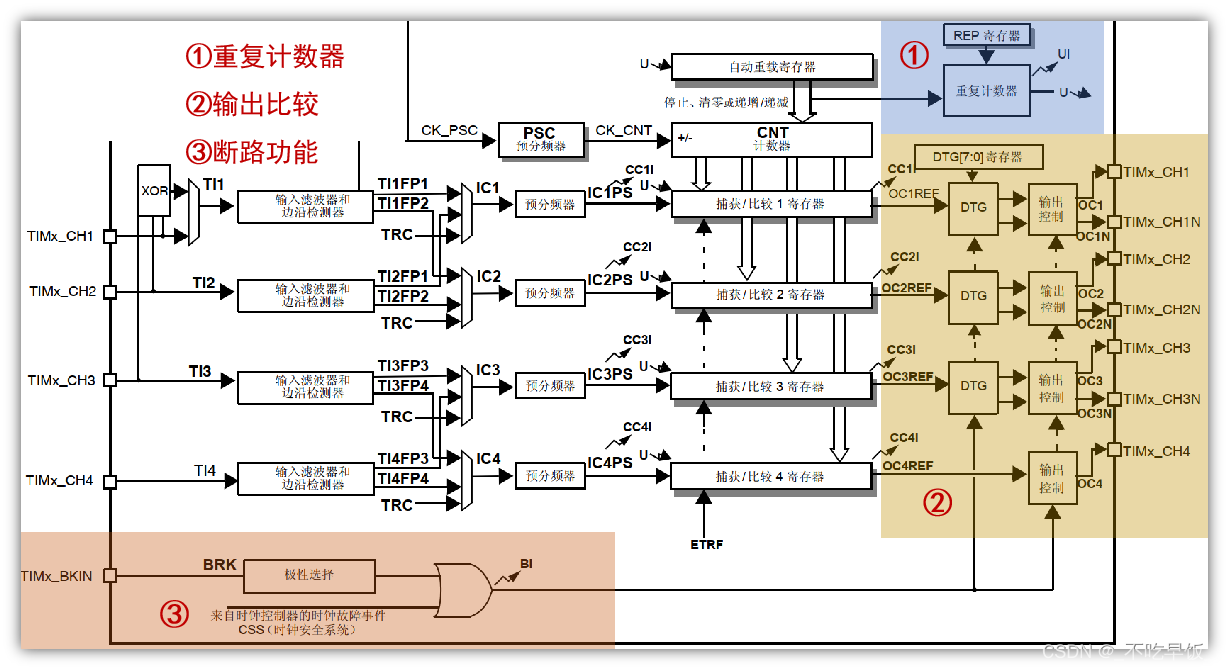
- 4.2,高级定时器框图(熟悉)
- 4.3,高级定时器输出指定个数PWM实验(掌握)
- 4.3.1,重复计数器特性(熟悉)
- 4.3.2,高级定时器输出指定个数PWM实验原理(掌握)
- 4.3.3,高级定时器输出指定个数PWM实验配置步骤(掌握)
- 4.3.4,编程实战:高级定时器输出指定个数PWM实验(掌握)
- 4.4,高级定时器输出比较模式实验(掌握)
- 4.4.1,高级定时器输出比较模式实验原理(掌握)
- 4.4.2,高级定时器输出比较模式实验配置步骤(掌握)
- 4.4.3,编程实战:高级定时器输出比较模式实验(掌握)
- 4.5,高级定时器互补输出带死区控制实验(掌握)
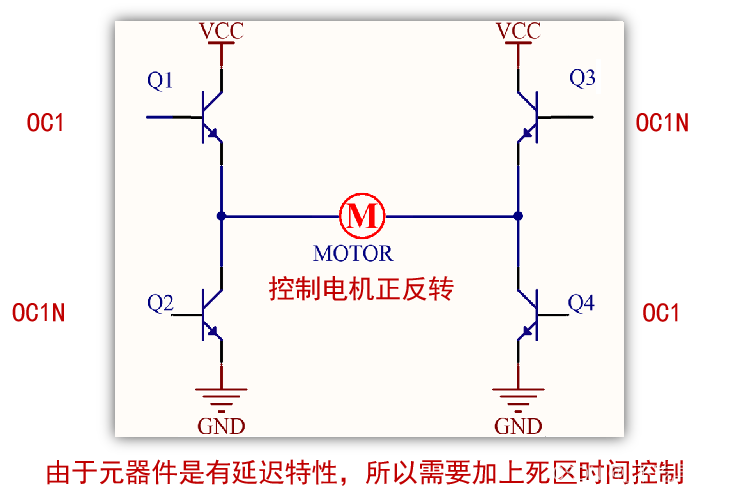
- 4.5.1,互补输出,还带死区控制,什么意思?(了解)
- 4.5.2,带死区控制的互补输出应用之H桥(了解)
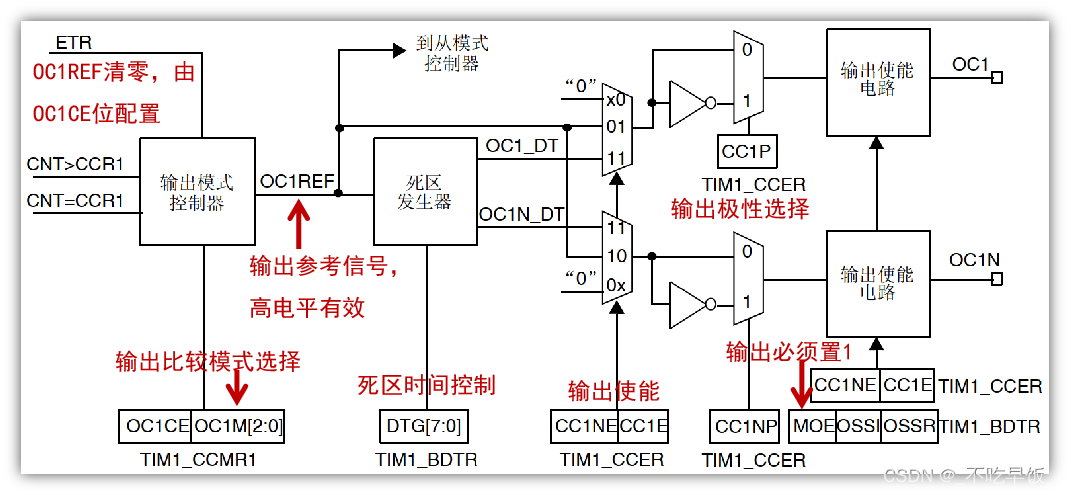
- 4.5.3,捕获/比较通道的输出部分(通道1至3)(熟悉)
- 4.5.4,死区时间计算(掌握)
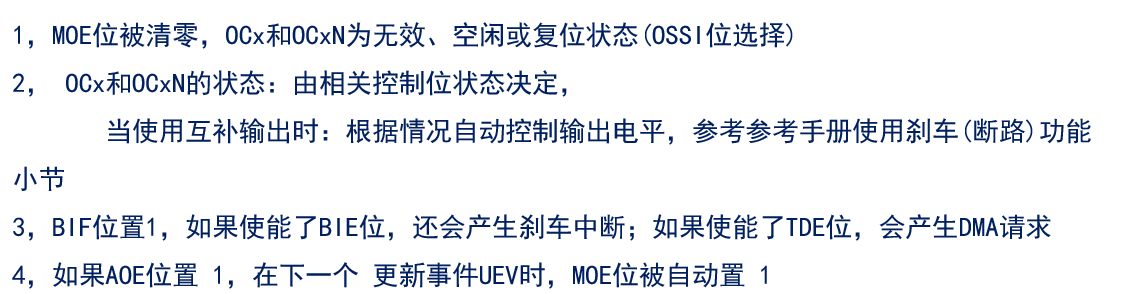
- 4.5.5,刹车(断路)功能(熟悉)
- 4.5.6,高级定时器互补输出带死区控制实验配置步骤(掌握)
- 4.5.7,编程实战:高级定时器互补输出带死区控制实验(掌握)
- 4.6,高级定时器PWM输入模式实验(掌握)
- 4.6.1,PWM输入模式工作原理(熟悉)
- 4.6.2,PWM输入模式时序(熟悉)
- 4.6.3,高级定时器PWM输入模式实验配置步骤(掌握)
- 4.6.4,编程实战:高级定时器PWM输入模式实验(掌握)
一、定时器概述(了解)
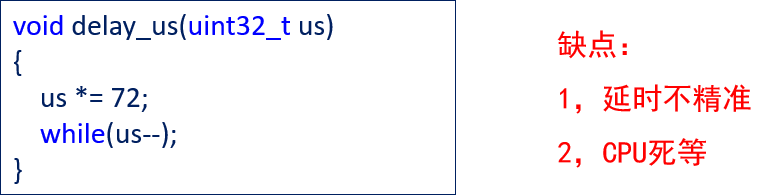
1.1,软件定时原理
使用纯软件(CPU死等)的方式实现定时(延时)功能
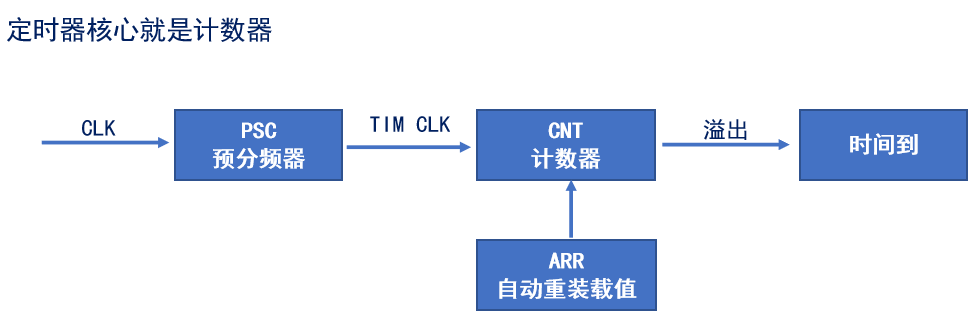
1.2,定时器定时原理
使用精准的时基,通过硬件的方式,实现定时功能
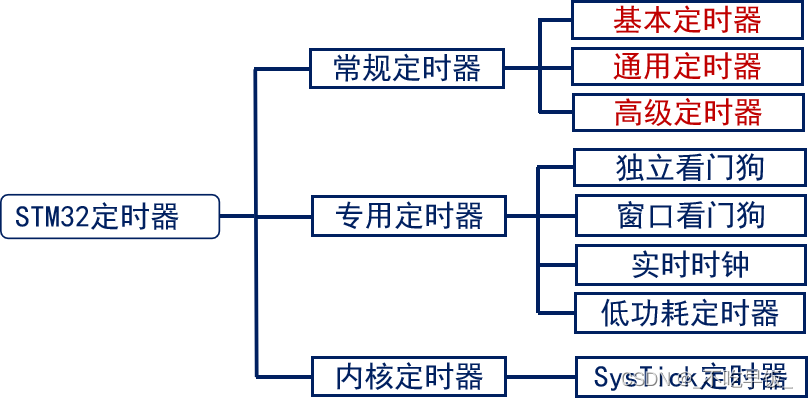
1.3,STM32定时器分类
1.4,STM32定时器特性表

1.5,STM32基本、通用、高级定时器的功能整体区别
二、基本定时器(掌握)
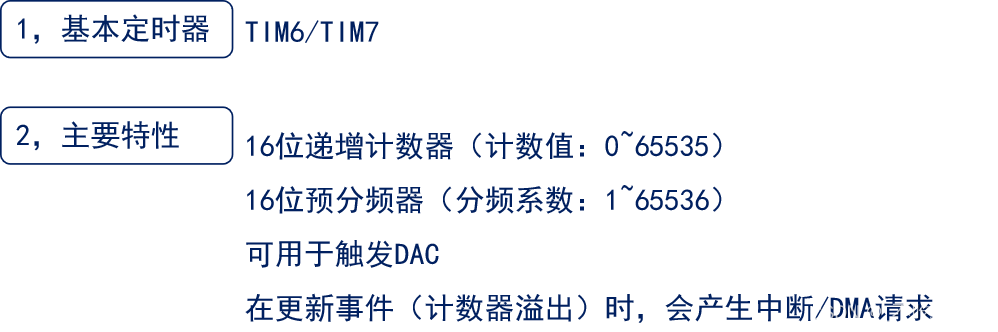
2.1,基本定时器简介(了解)
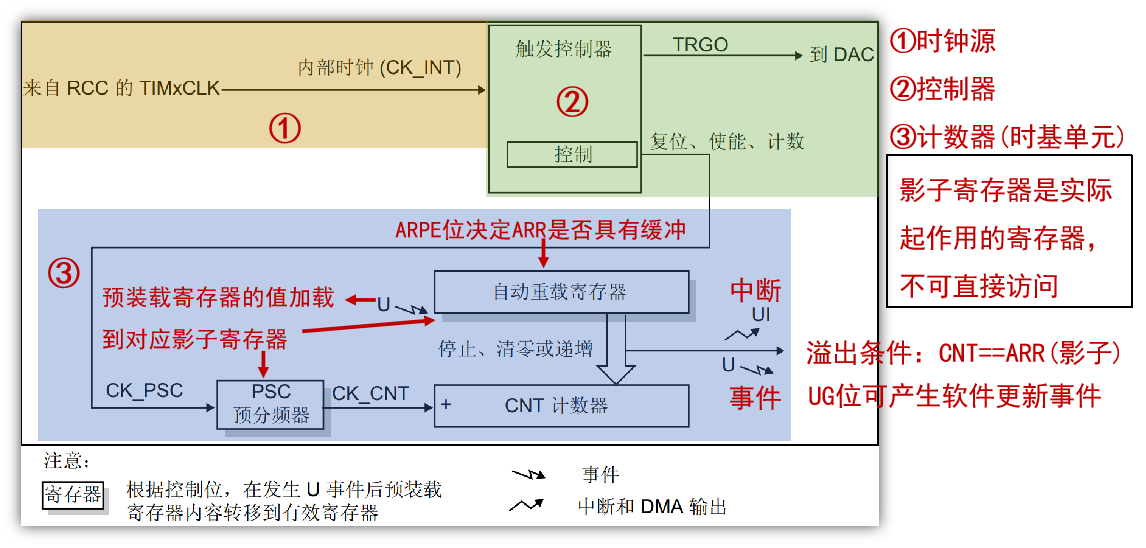
2.2,基本定时器框图(熟悉)
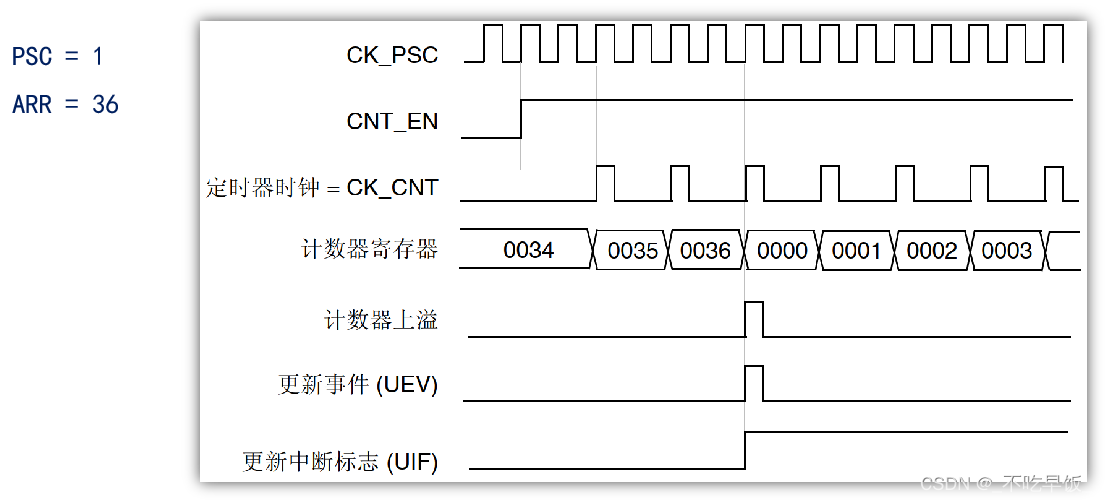
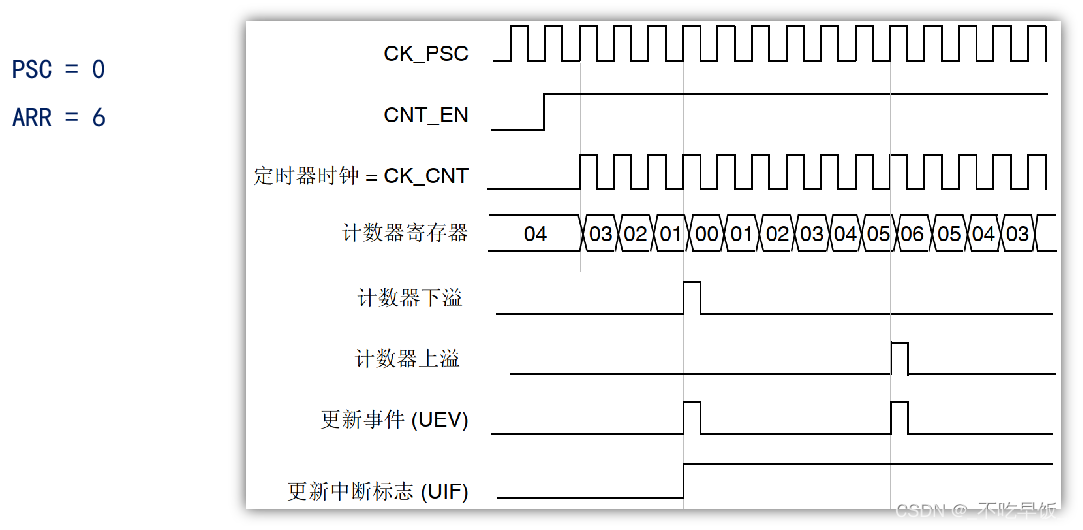
2.3,定时器计数模式及溢出条件(熟悉)
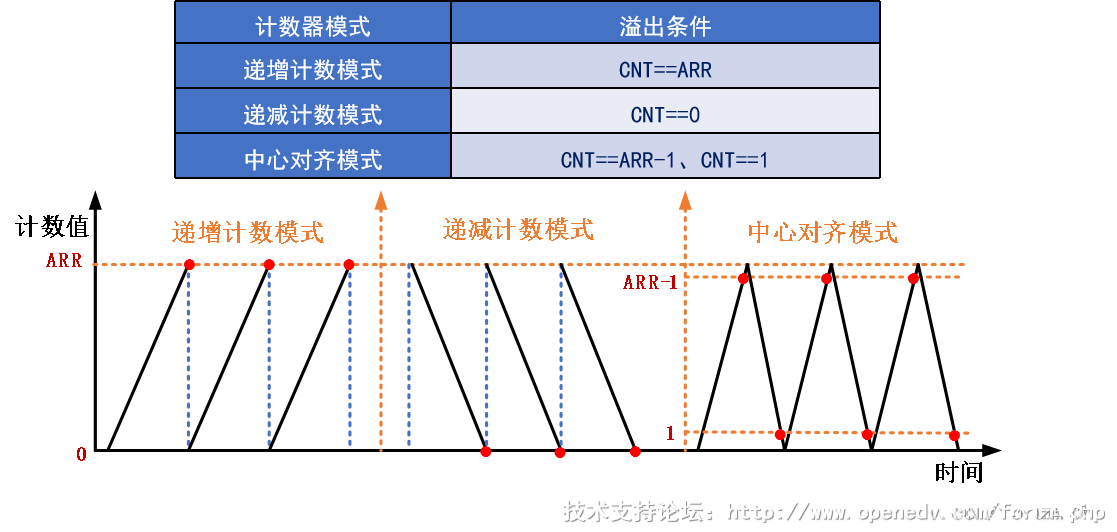
递增计数模式实例说明
中心对齐模式实例说明
2.4,定时器中断实验相关寄存器(了解)
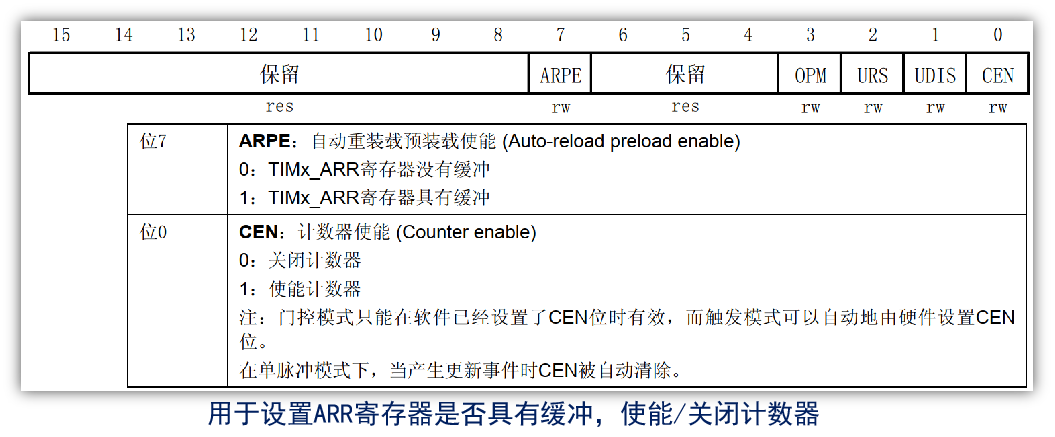
TIM6 和TIM7 控制寄存器 1(TIMx_CR1)
TIM6 和TIM7 DMA/中断使能寄存器(TIMx_DIER)
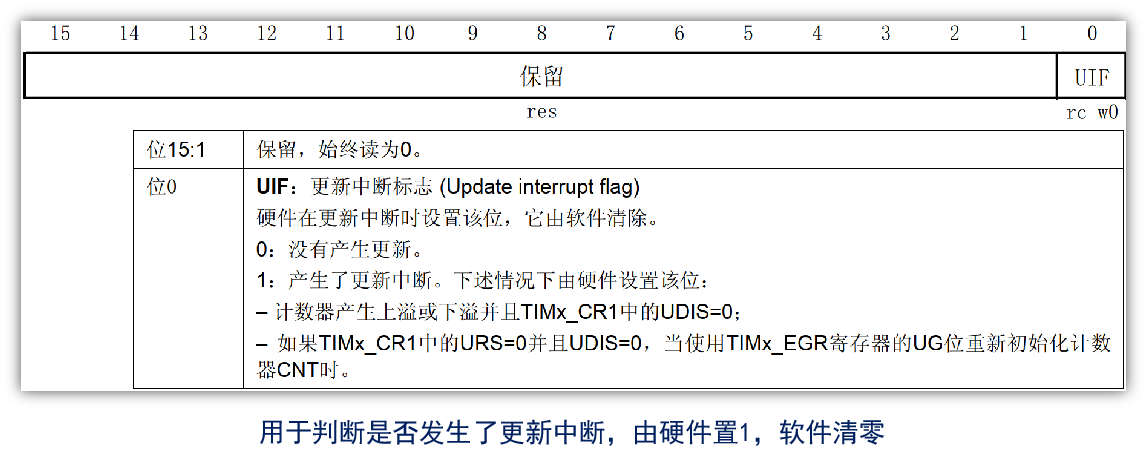
 TIM6 和TIM7 状态寄存器(TIMx_SR)
TIM6 和TIM7 状态寄存器(TIMx_SR)
TIM6 和TIM7 计数器(TIMx_CNT)

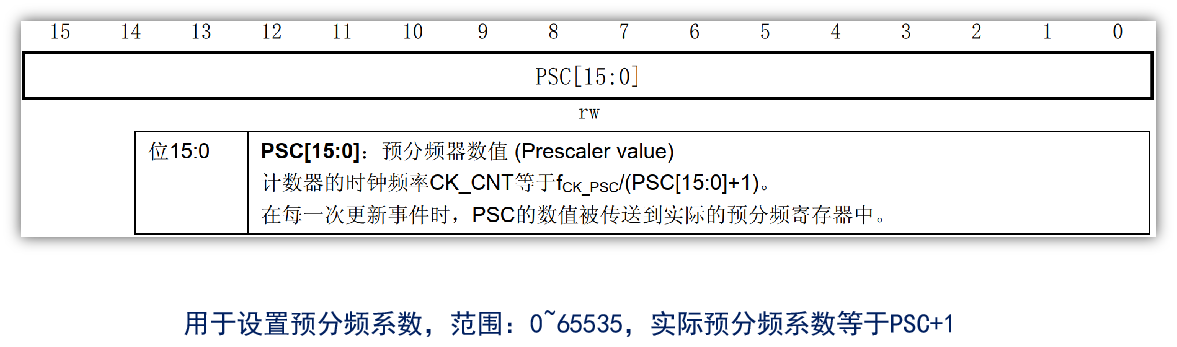
TIM6 和TIM7 预分频器(TIMx_PSC)
TIM6 和TIM7 自动重装载寄存器(TIMx_ARR)
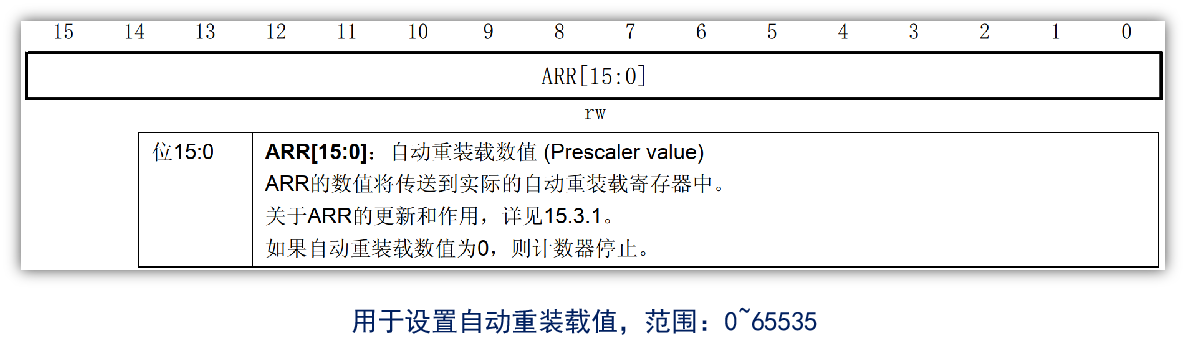
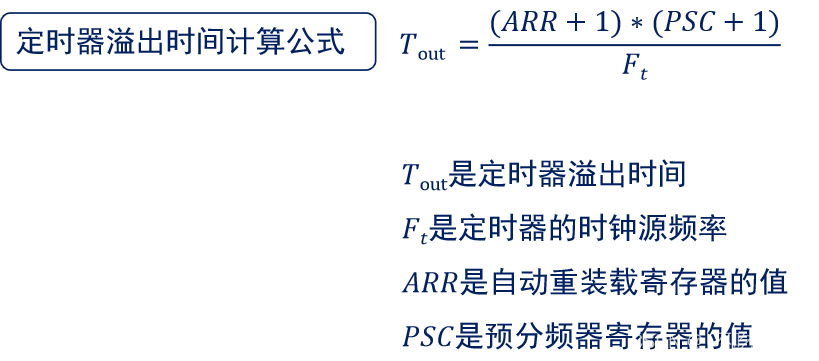
2.5,定时器溢出时间计算方法(掌握)
2.6,定时器中断实验配置步骤(掌握)

HAL_TIM_Base_Init()

HAL_TIM_Base_MspInit() //配置NVIC、CLOCK等

HAL_TIM_Base_Start_IT()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()
相关HAL库函数介绍

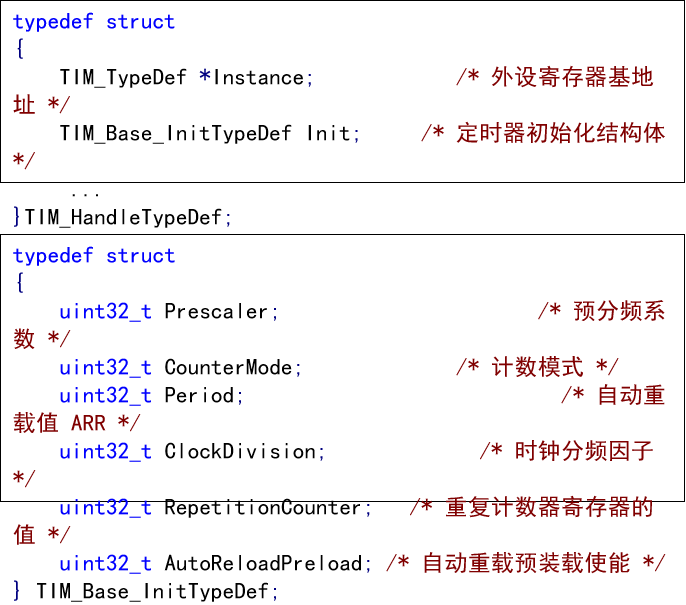
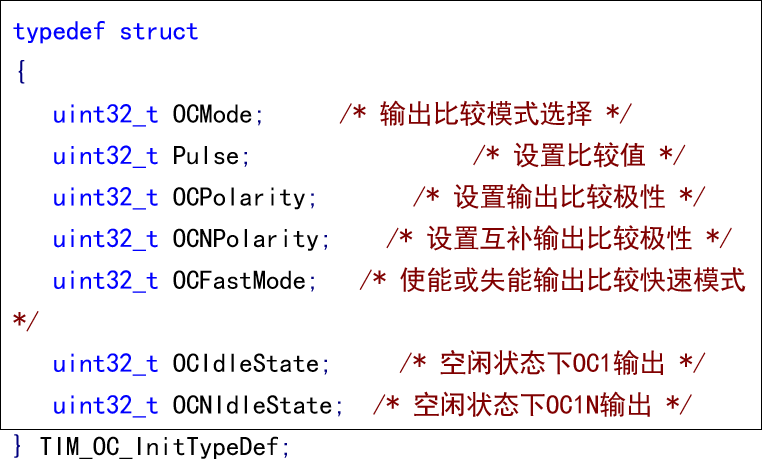
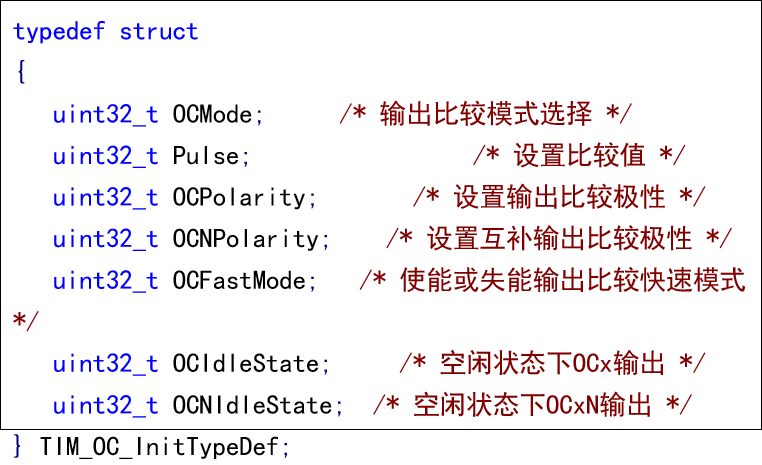
关键结构体介绍
2.7,编程实战:定时器中断实验(掌握)
btim.c
#include "./BSP/LED/led.h"
#include "./BSP/TIMER/btim.h"
TIM_HandleTypeDef g_timx_handle; /* 定时器句柄 */
/*** @brief 基本定时器TIMX定时中断初始化函数* @note* 基本定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候* 基本定时器的时钟为APB1时钟的2倍, 而APB1为36M, 所以定时器时钟 = 72Mhz* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.* Ft=定时器工作频率,单位:Mhz** @param arr: 自动重装值。* @param psc: 时钟预分频数* @retval 无*/
void btim_timx_int_init(uint16_t arr, uint16_t psc)
{g_timx_handle.Instance = BTIM_TIMX_INT; /* 通用定时器X */g_timx_handle.Init.Prescaler = psc; /* 设置预分频系数 */g_timx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */g_timx_handle.Init.Period = arr; /* 自动装载值 */HAL_TIM_Base_Init(&g_timx_handle);HAL_TIM_Base_Start_IT(&g_timx_handle); /* 使能定时器x及其更新中断 */
}/*** @brief 定时器底层驱动,开启时钟,设置中断优先级此函数会被HAL_TIM_Base_Init()函数调用* @param htim:定时器句柄* @retval 无*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{if (htim->Instance == BTIM_TIMX_INT){BTIM_TIMX_INT_CLK_ENABLE(); /* 使能TIM时钟 */HAL_NVIC_SetPriority(BTIM_TIMX_INT_IRQn, 1, 3); /* 抢占1,子优先级3,组2 */HAL_NVIC_EnableIRQ(BTIM_TIMX_INT_IRQn); /* 开启ITM3中断 */}
}/*** @brief 定时器TIMX中断服务函数* @param 无* @retval 无*/
void BTIM_TIMX_INT_IRQHandler(void)
{HAL_TIM_IRQHandler(&g_timx_handle); /* 定时器中断公共处理函数 */
}/*** @brief 定时器更新中断回调函数* @param htim:定时器句柄* @retval 无*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if (htim->Instance == BTIM_TIMX_INT){LED1_TOGGLE(); /* LED1反转 */}
}
btim.h
#ifndef __BTIM_H
#define __BTIM_H#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 基本定时器 定义 */
/* TIMX 中断定义 * 默认是针对TIM6/TIM7* 注意: 通过修改这4个宏定义,可以支持TIM1~TIM8任意一个定时器.*/#define BTIM_TIMX_INT TIM6
#define BTIM_TIMX_INT_IRQn TIM6_DAC_IRQn
#define BTIM_TIMX_INT_IRQHandler TIM6_DAC_IRQHandler
#define BTIM_TIMX_INT_CLK_ENABLE() do{ __HAL_RCC_TIM6_CLK_ENABLE(); }while(0) /* TIM6 时钟使能 */
/******************************************************************************************/
void btim_timx_int_init(uint16_t arr, uint16_t psc); /* 基本定时器 定时中断初始化函数 */#endif
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/TIMER/btim.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */delay_init(72); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */btim_timx_int_init(5000 - 1, 7200 - 1); /* 10Khz的计数频率,计数5K次为500ms */while (1){LED0_TOGGLE();delay_ms(200);}
}
三、通用定时器(掌握)
3.1,通用定时器简介(了解)
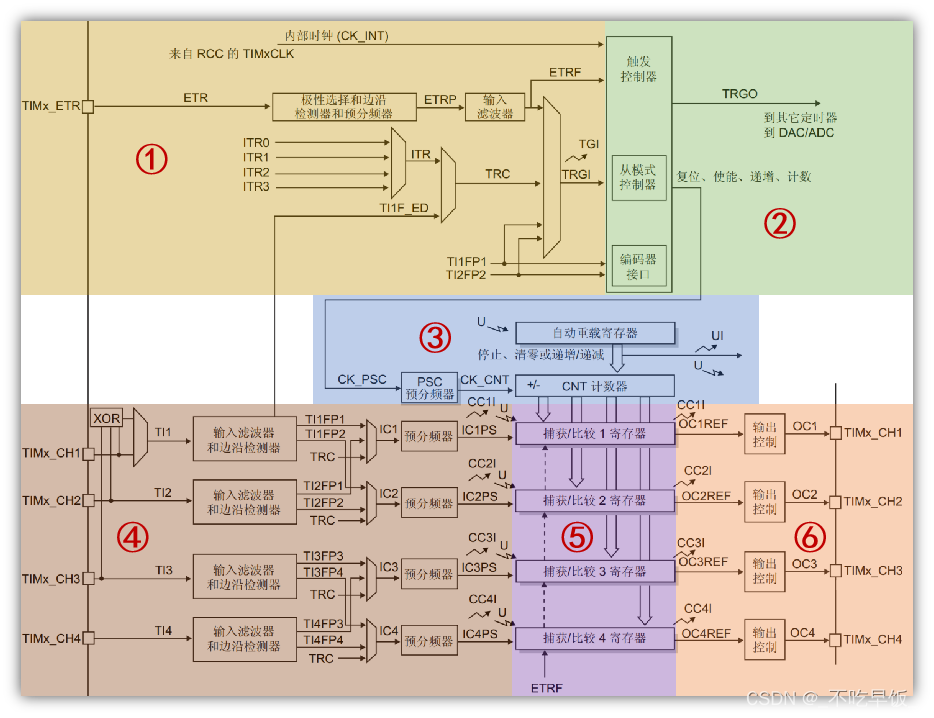
3.2,通用定时器框图(熟悉)

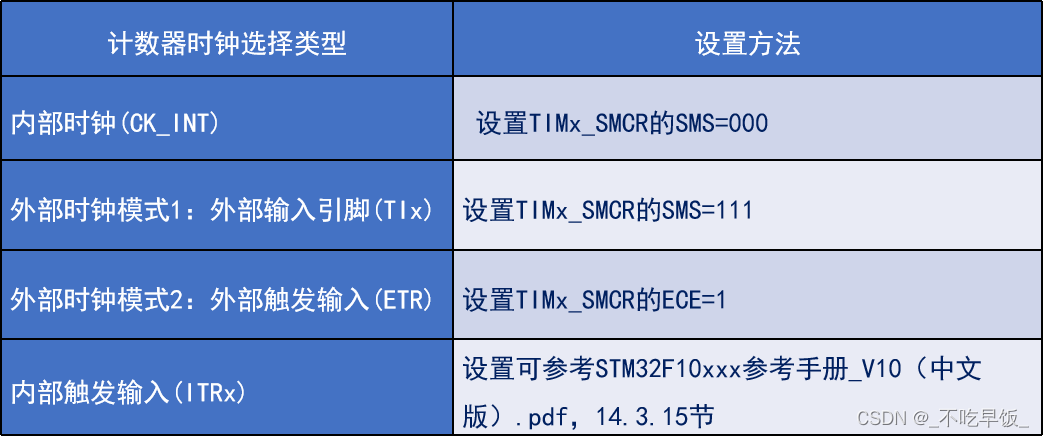
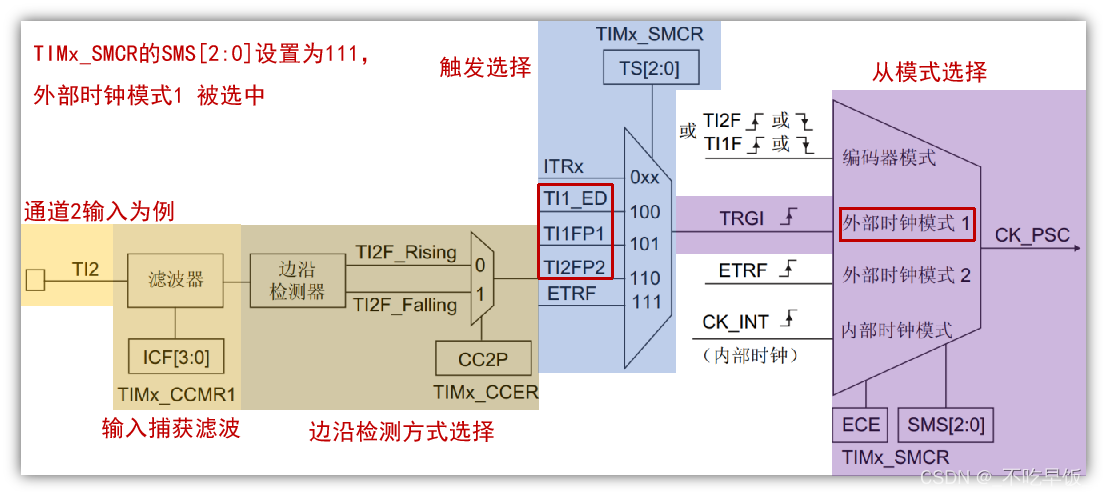
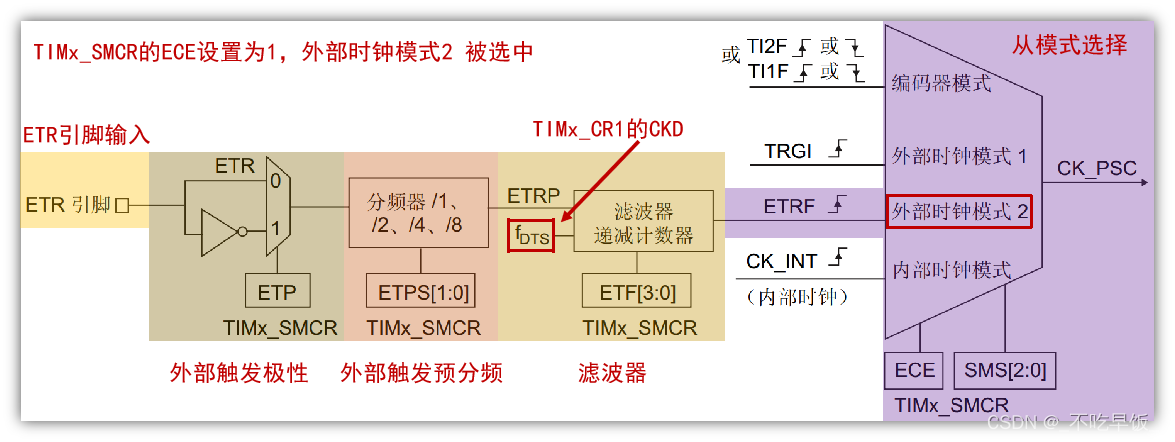
3.3,计数器时钟源(掌握)

计数器时钟源寄存器设置方法(F1为例)
外部时钟模式1
外部时钟模式2
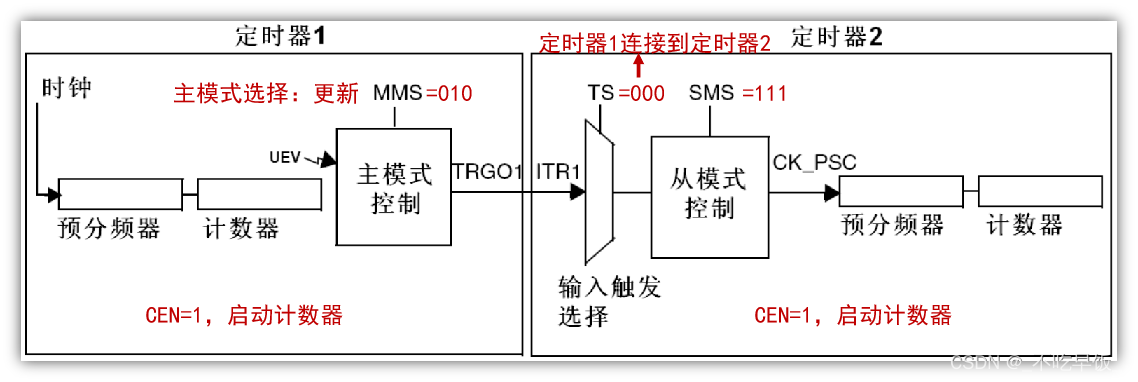
使用一个定时器作为另一个定时器的预分频器(F1为例)
解读通用定时器中断实验
3.4,通用定时器PWM输出实验(掌握)
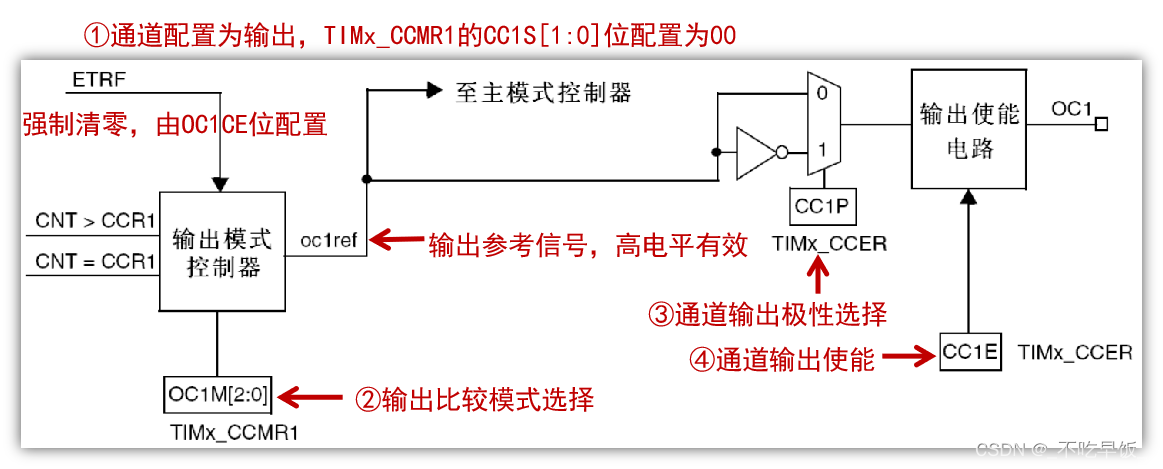
3.4.1,通用定时器输出比较部分框图介绍(熟悉)
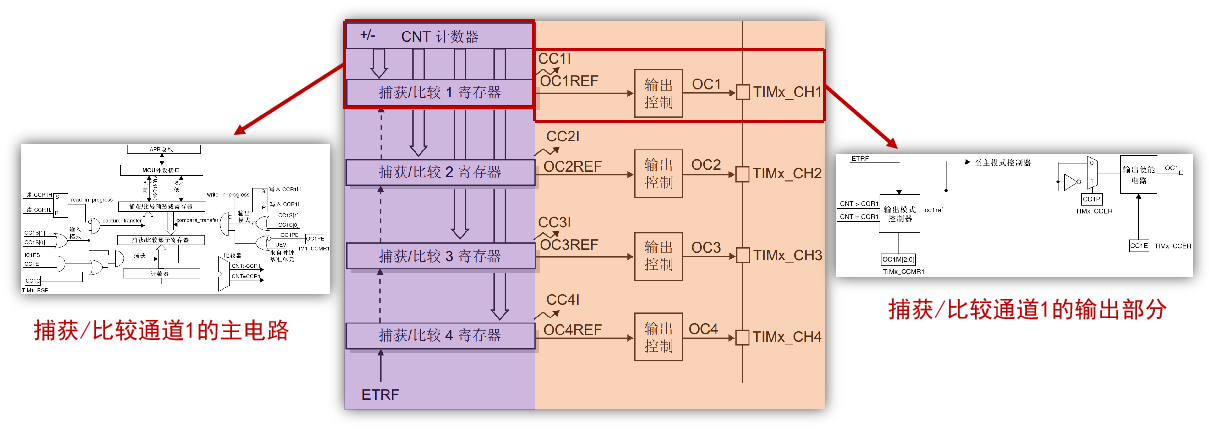
捕获/比较通道1的主电路—输出部分

捕获/比较通道的输出部分(通道1)
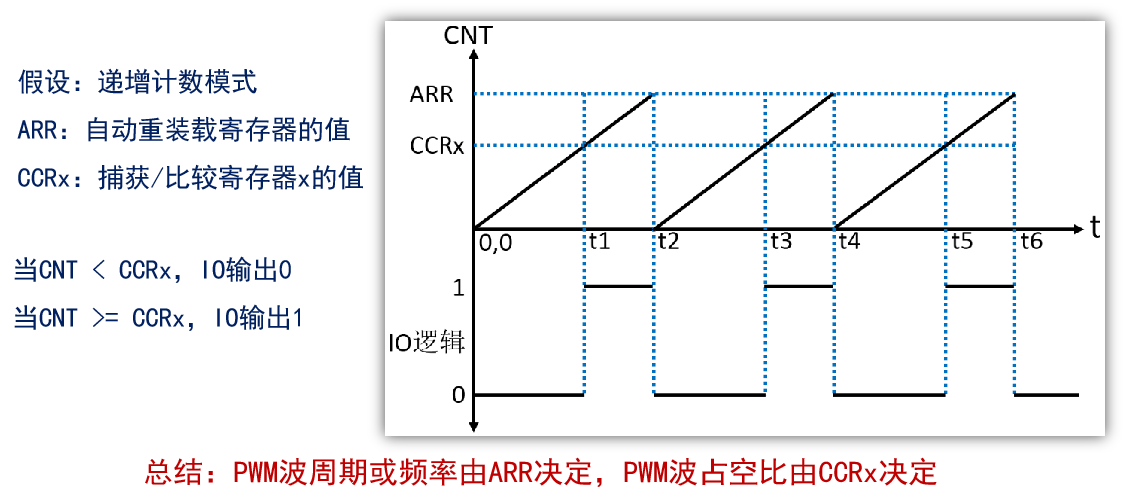
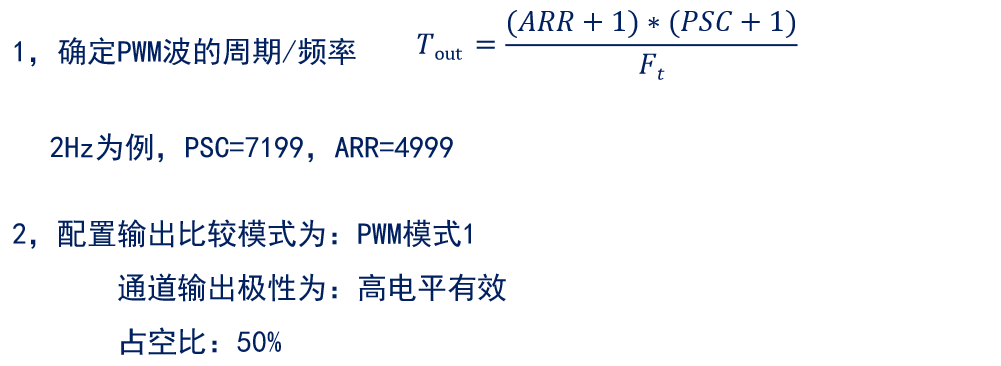
3.4.2,通用定时器输出PWM原理(掌握)
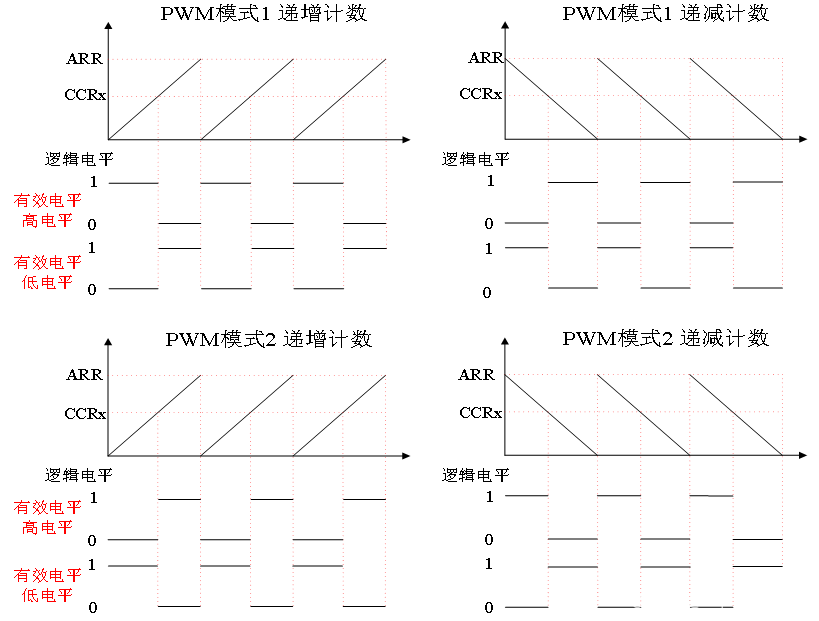
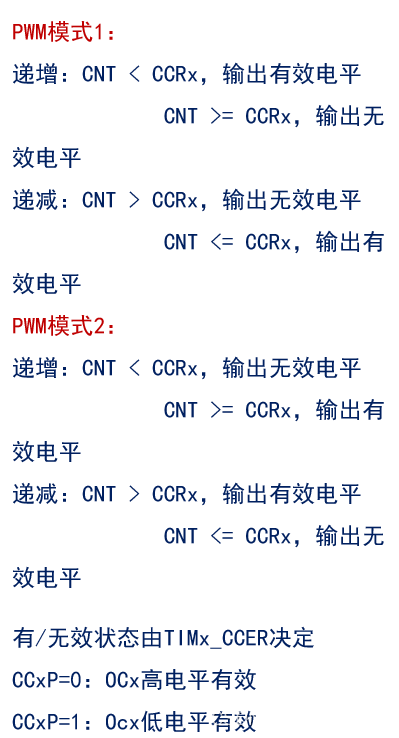
3.4.3,PWM模式(熟悉)
3.4.4,通用定时器PWM输出实验配置步骤(掌握)

HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_TIM_PWM_Start()

__HAL_TIM_SET_COMPARE()

__HAL_TIM_ENABLE_OCxPRELOAD()
相关HAL库函数介绍

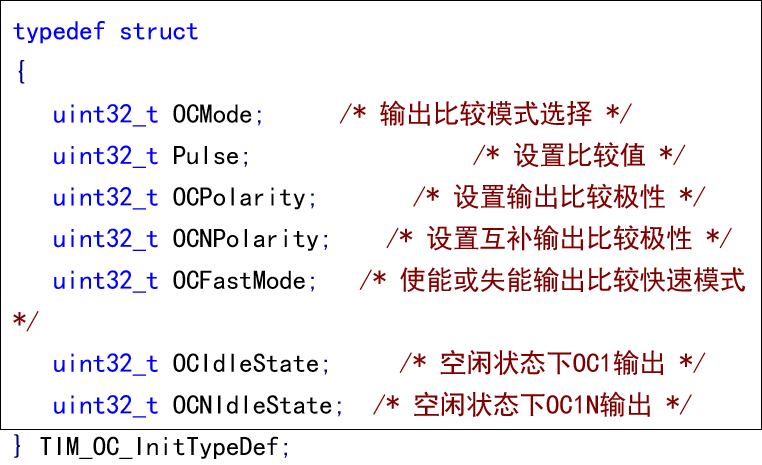
关键结构体介绍
3.4.5,编程实战:通用定时器PWM输出实验(掌握)
3.5,通用定时器输入捕获实验(掌握)
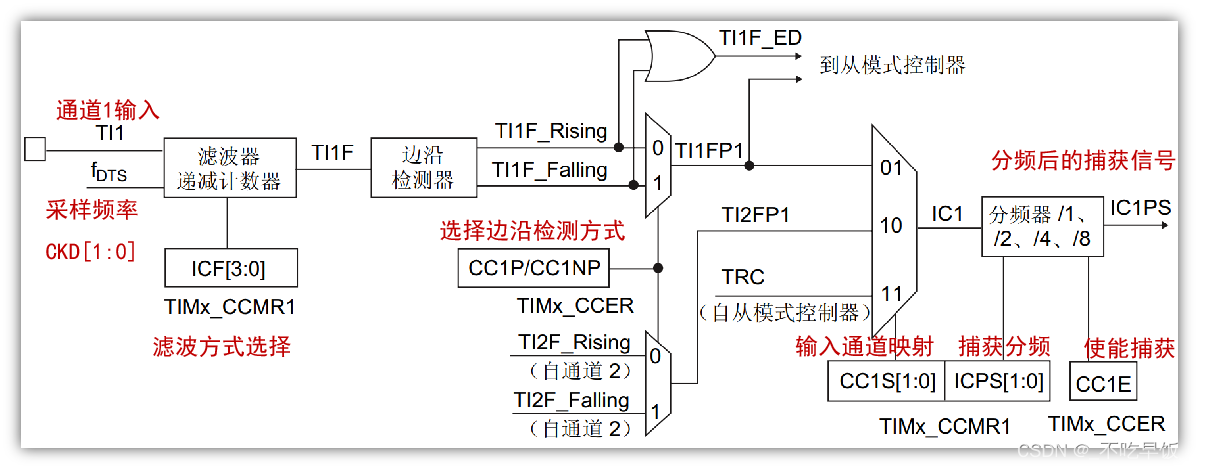
3.5.1,通用定时器输入捕获部分框图介绍(熟悉)
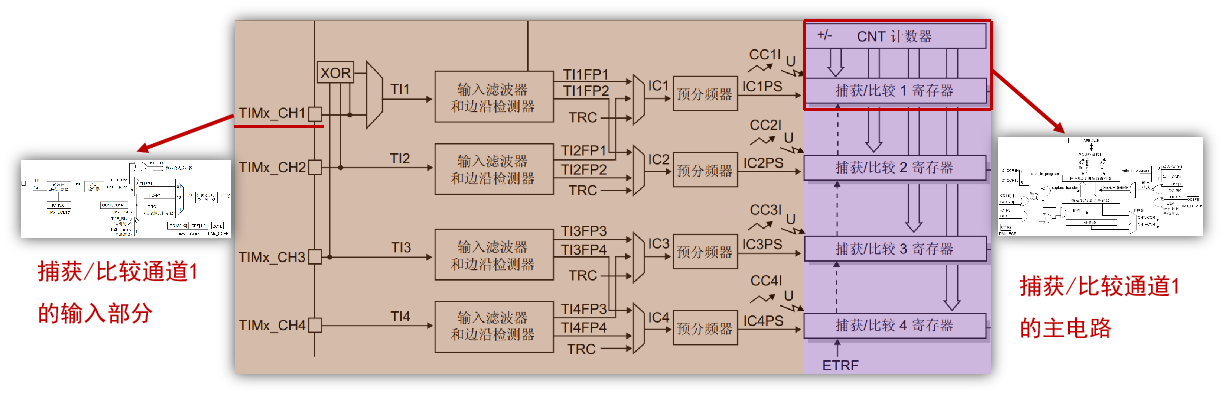
捕获/比较通道的输入部分(通道1)
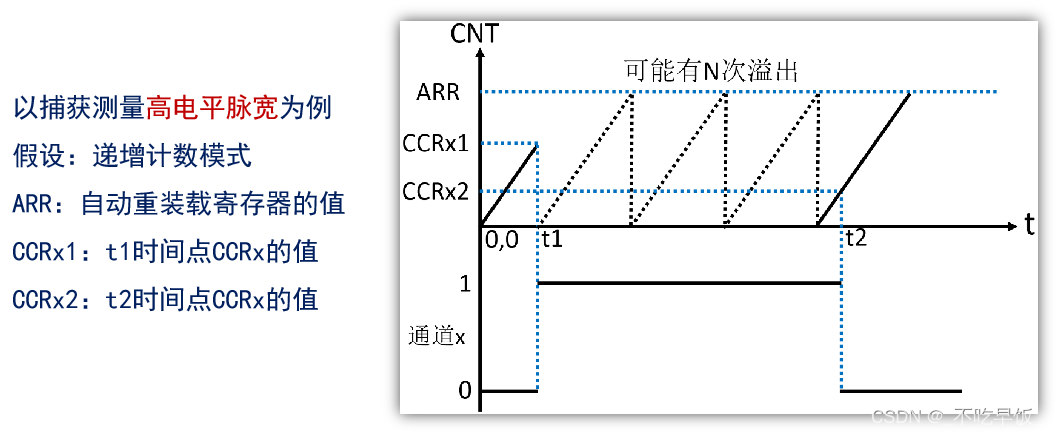
3.5.2,通用定时器输入捕获脉宽测量原理(掌握)
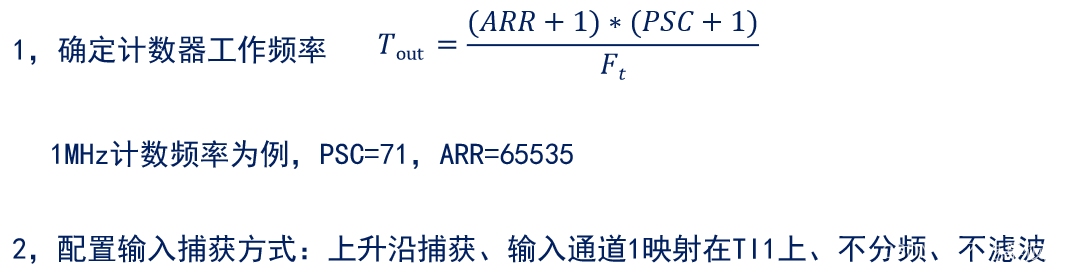
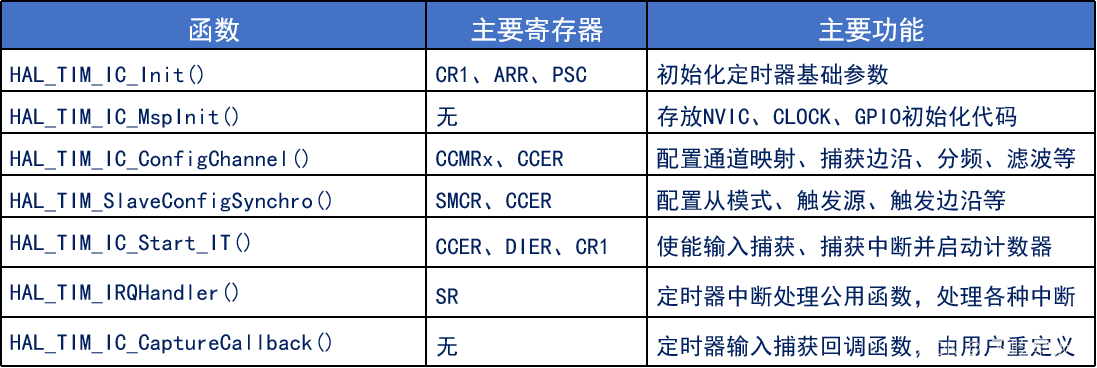
3.5.3,通用定时器输入捕获实验配置步骤(掌握)

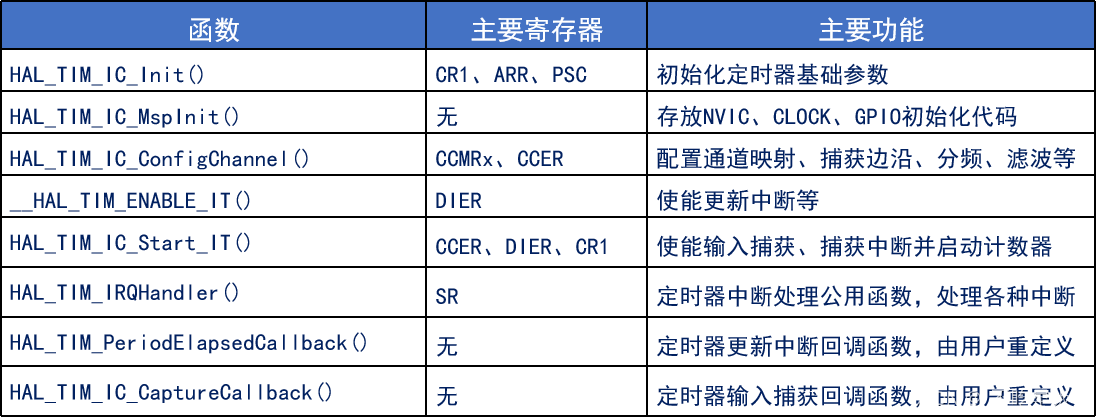
HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_IC_ConfigChannel()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

__HAL_TIM_ENABLE_IT()

HAL_TIM_IC_Start_IT()

TIMx_IRQHandler()等、 HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()、HAL_TIM_IC_CaptureCallback()
相关HAL库函数介绍
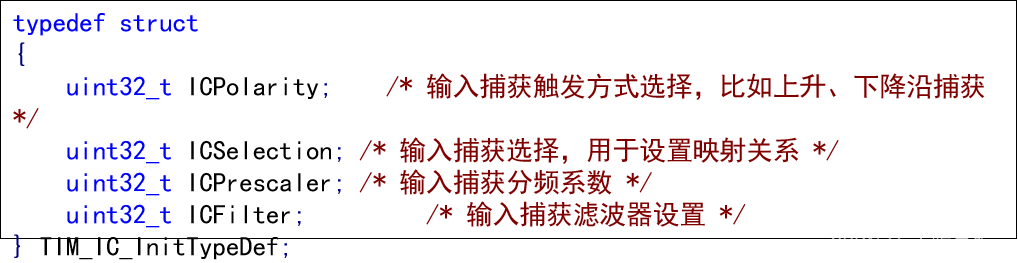
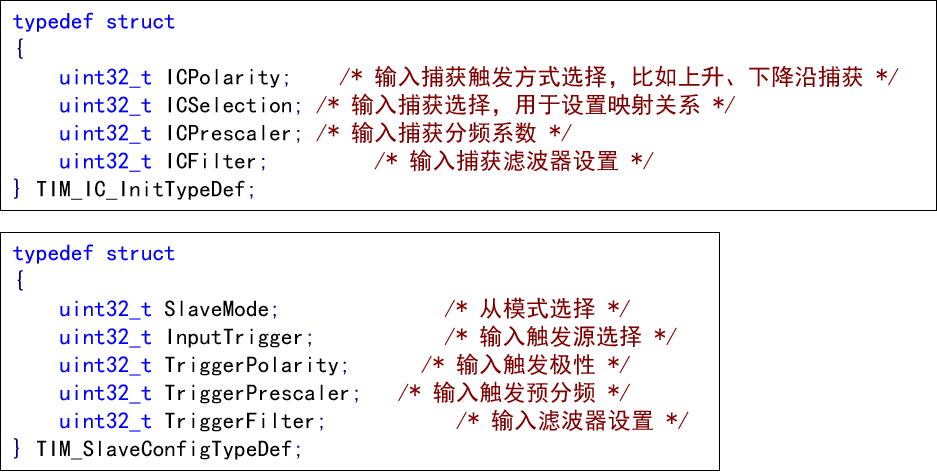
关键结构体介绍
3.5.4,编程实战:通用定时器输入捕获实验(掌握)
通过定时器5通道1来捕获按键高电平脉宽时间,通过串口打印出来
3.6,通用定时器脉冲计数实验(掌握)
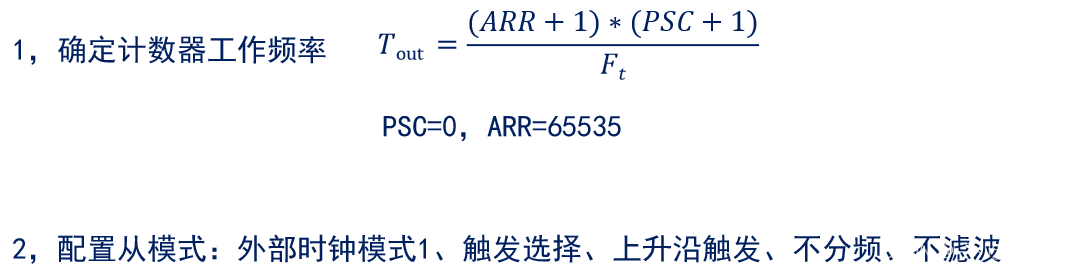
3.6.1,脉冲计数实验原理(熟悉)
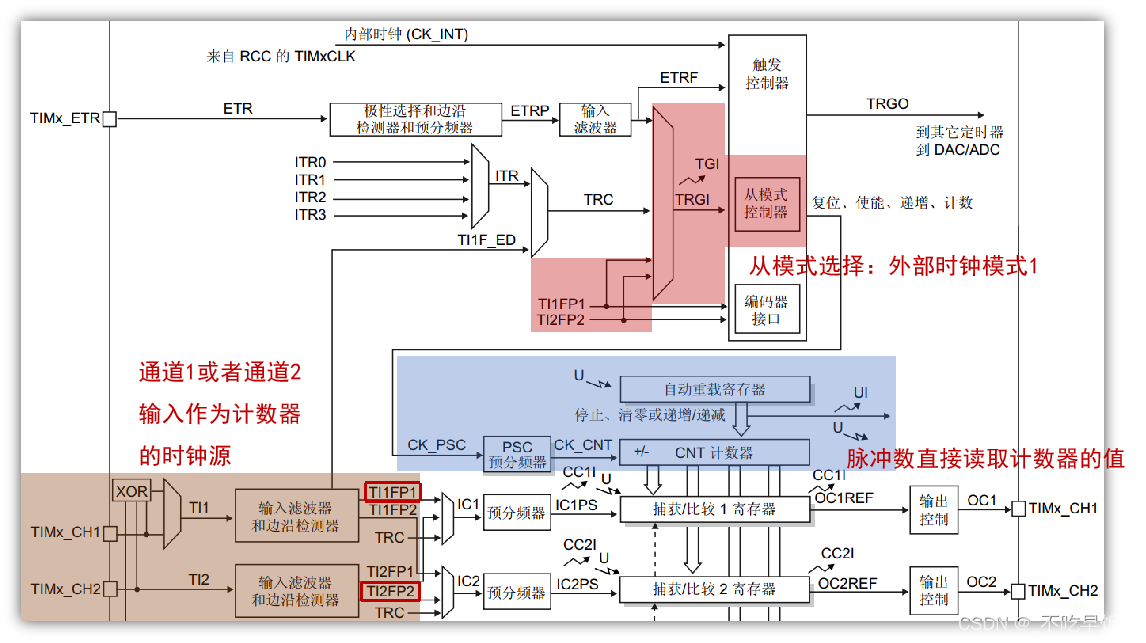
外部时钟模式1

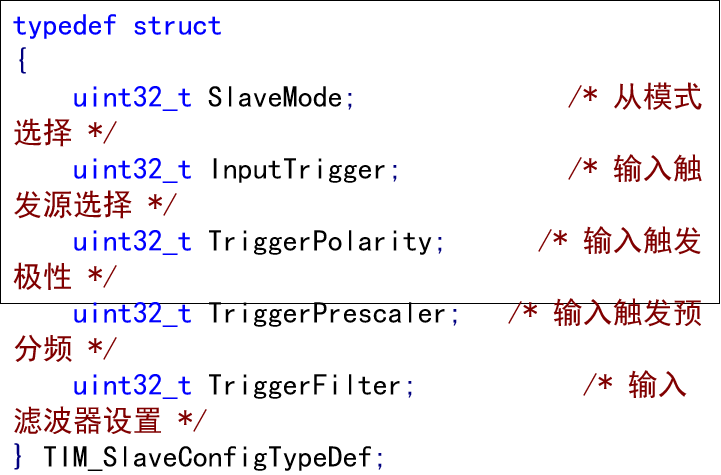
3.6.2,通用定时器脉冲计数实验配置步骤(掌握)

HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_SlaveConfigSynchro()

HAL_TIM_IC_Start()

__HAL_TIM_GET_COUNTER()

__HAL_TIM_SET_COUNTER()
相关HAL库函数介绍

关键结构体介绍
3.6.3,编程实战:通用定时器脉冲计数实验(掌握)
将定时器2通道1输入的高电平脉冲作为定时器2的时钟,并通过串口打印脉冲数
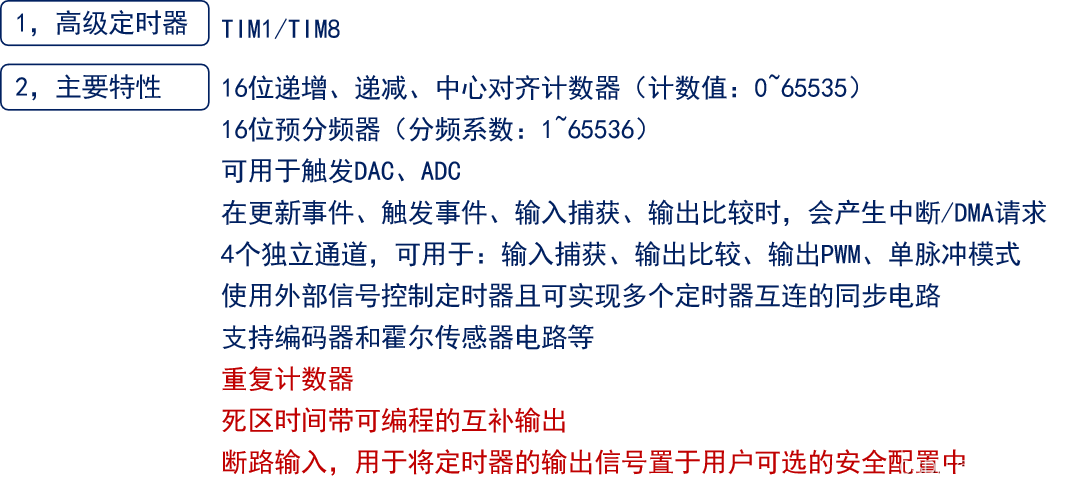
四、高级定时器(掌握)
4.1,高级定时器简介(了解)
4.2,高级定时器框图(熟悉)
4.3,高级定时器输出指定个数PWM实验(掌握)
4.3.1,重复计数器特性(熟悉)
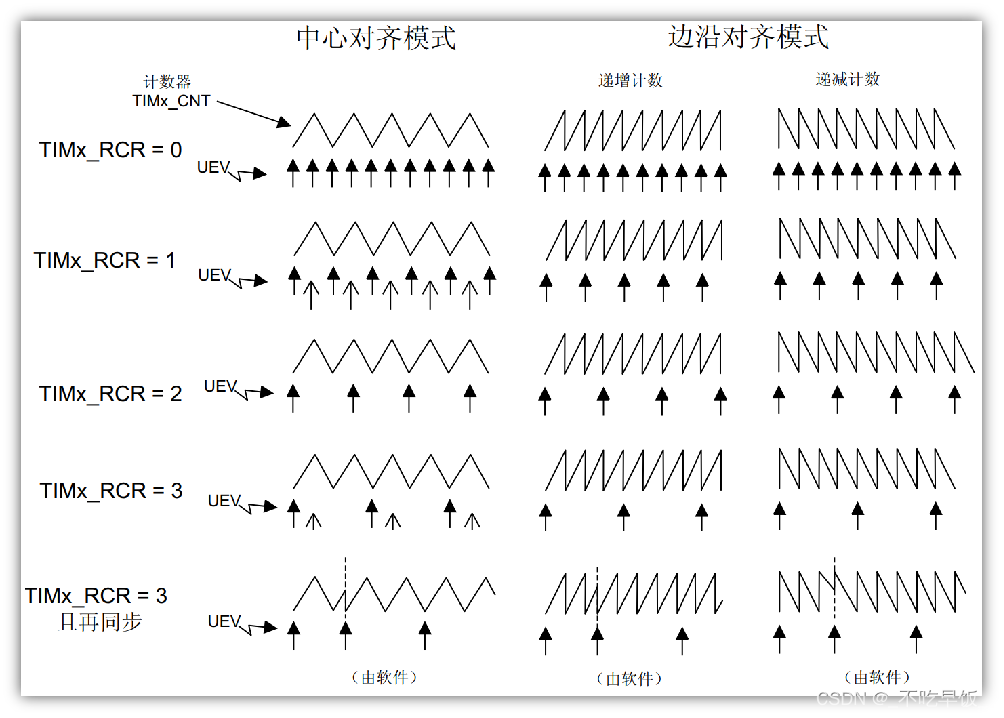
计数器每次上溢或下溢都能使重复计数器减1,减到0时,再发生一次溢出就会产生更新事件
如果设置RCR为N,
更新事件将在N+1
次溢出时发生
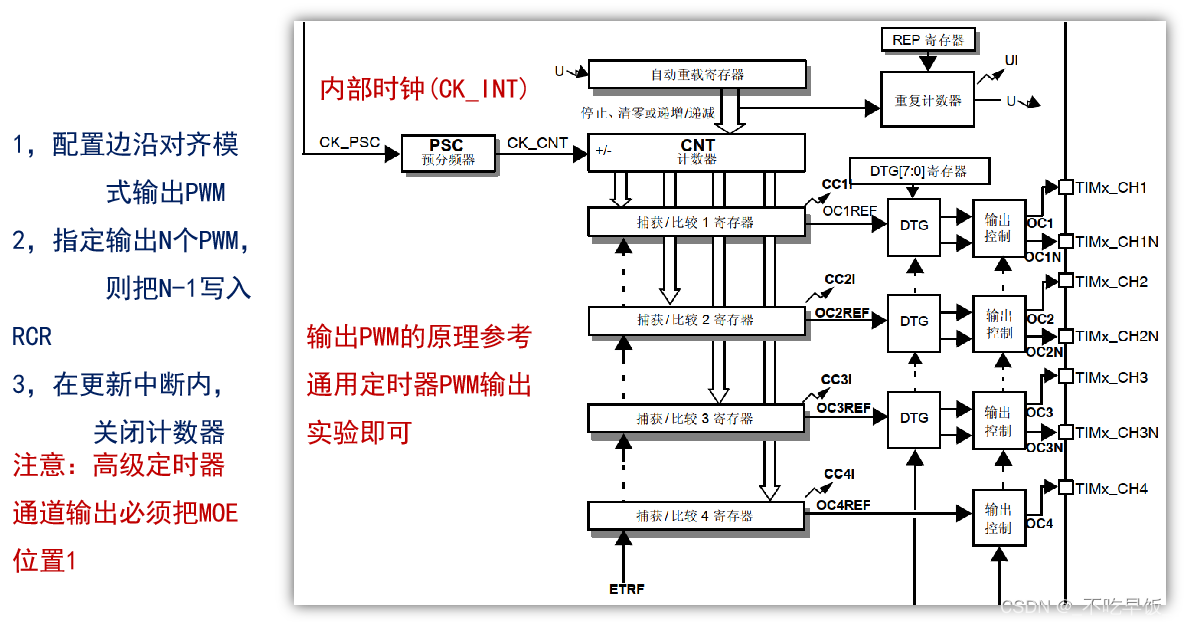
4.3.2,高级定时器输出指定个数PWM实验原理(掌握)
4.3.3,高级定时器输出指定个数PWM实验配置步骤(掌握)

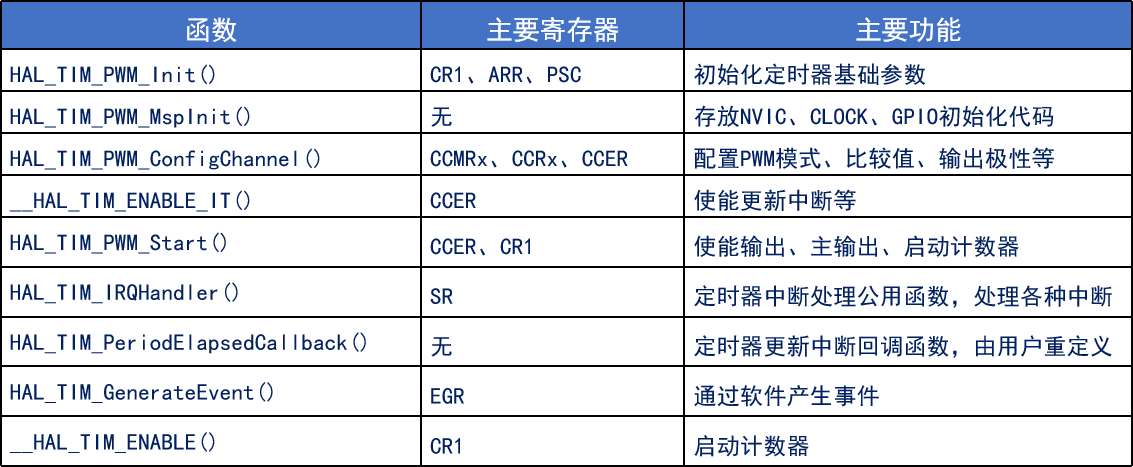
HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

__HAL_TIM_ENABLE_IT()

HAL_TIM_PWM_Start()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_PeriodElapsedCallback()
相关HAL库函数介绍
关键结构体介绍
4.3.4,编程实战:高级定时器输出指定个数PWM实验(掌握)
通过定时器8通道1实现指定个数PWM输出,用于控制LED1的亮灭
4.4,高级定时器输出比较模式实验(掌握)
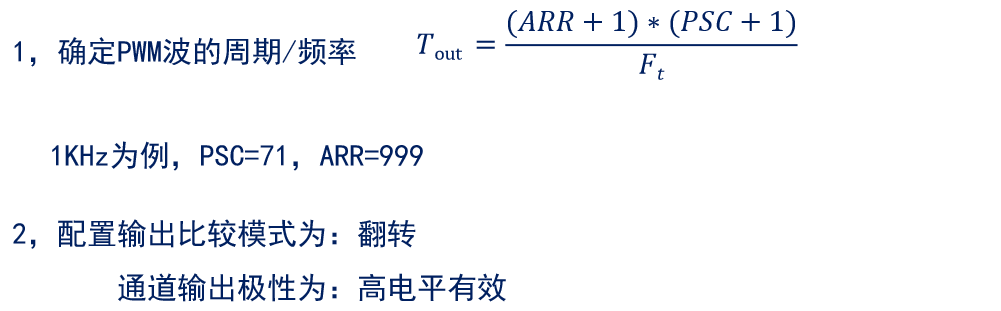
4.4.1,高级定时器输出比较模式实验原理(掌握)

4.4.2,高级定时器输出比较模式实验配置步骤(掌握)

HAL_TIM_OC_Init()

HAL_TIM_OC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_OC_ConfigChannel()

__HAL_TIM_ENABLE_OCxPRELOAD()

HAL_TIM_OC_Start()

__HAL_TIM_SET_COMPARE()
相关HAL库函数介绍

关键结构体介绍

4.4.3,编程实战:高级定时器输出比较模式实验(掌握)
通过定时器8通道1/2/3/4输出相位分别为25%、50%、75%、100%的PWM
4.5,高级定时器互补输出带死区控制实验(掌握)
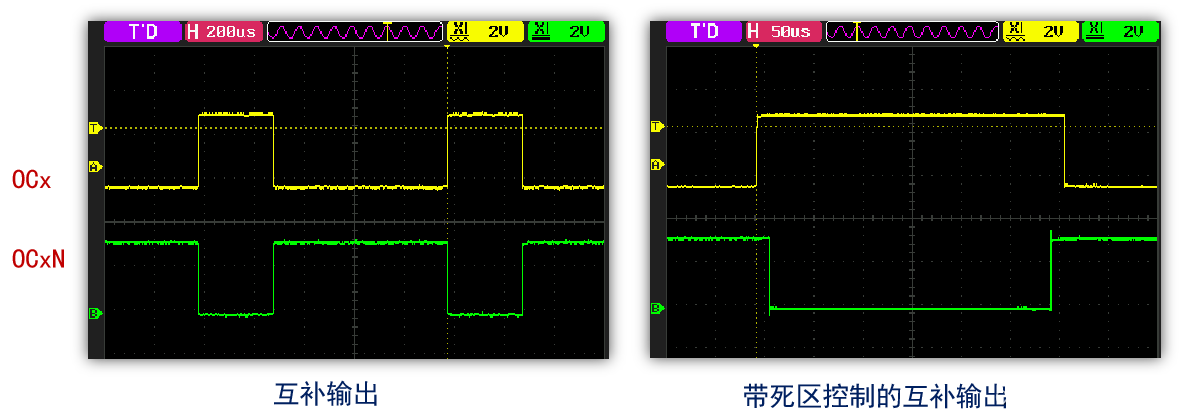
4.5.1,互补输出,还带死区控制,什么意思?(了解)
4.5.2,带死区控制的互补输出应用之H桥(了解)
4.5.3,捕获/比较通道的输出部分(通道1至3)(熟悉)
4.5.4,死区时间计算(掌握)
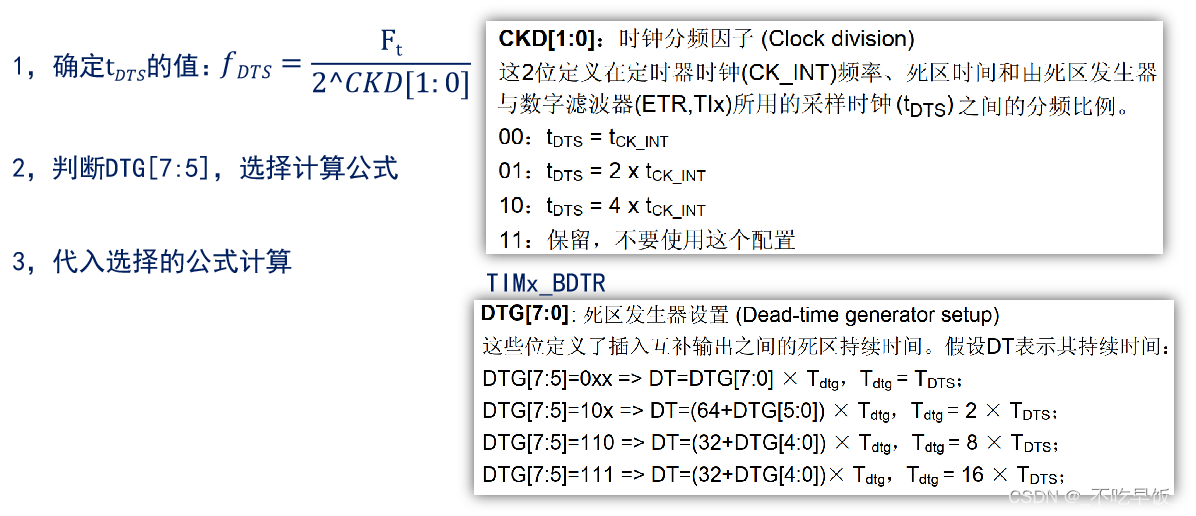
举个栗子(F1为例):DTG[7:0]=250
250,即二进制:1111 1010,选第四条
DT = (32+26)1655.56 ns=51.55968us
4.5.5,刹车(断路)功能(熟悉)

发生刹车后,会怎么样?
4.5.6,高级定时器互补输出带死区控制实验配置步骤(掌握)

HAL_TIM_PWM_Init()

HAL_TIM_PWM_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_PWM_ConfigChannel()

HAL_TIMEx_ConfigBreakDeadTime()

HAL_TIM_PWM_Start()

HAL_TIMEx_PWMN_Start()
相关HAL库函数介绍

关键结构体介绍
4.5.7,编程实战:高级定时器互补输出带死区控制实验(掌握)
通过定时器1通道1输出频率为1KHz,占空比为70%的PWM,使用PWM模式1
使能互补输出并设置死区时间控制:设置DTG为100(5.56us),进行验证死区时间是否正确
使能刹车功能:刹车输入信号高电平有效,配置输出空闲状态等,最后用示波器验证

4.6,高级定时器PWM输入模式实验(掌握)
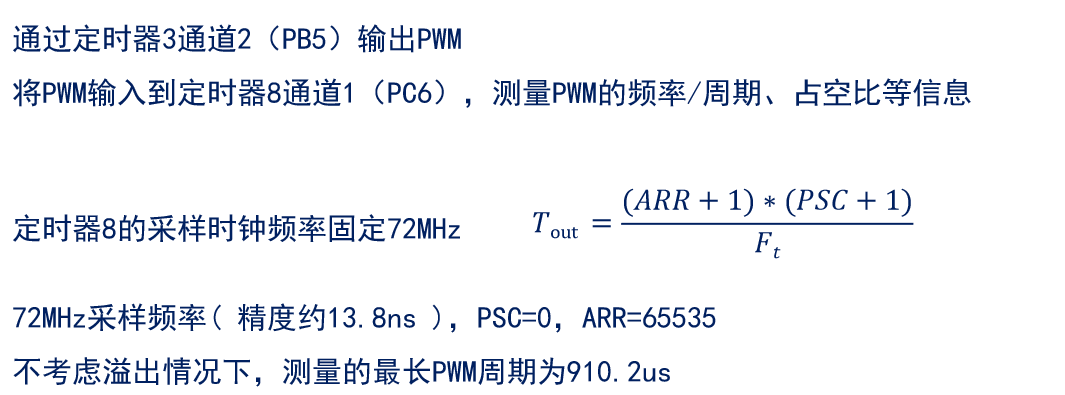
4.6.1,PWM输入模式工作原理(熟悉)
4.6.2,PWM输入模式时序(熟悉)
4.6.3,高级定时器PWM输入模式实验配置步骤(掌握)

HAL_TIM_IC_Init()

HAL_TIM_IC_MspInit() //配置NVIC、CLOCK、GPIO等

HAL_TIM_IC_ConfigChannel()

HAL_TIM_SlaveConfigSynchro()

HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()

HAL_TIM_IC_Start_IT()、 HAL_TIM_IC_Start()

TIMx_IRQHandler()等、HAL_TIM_IRQHandler()

HAL_TIM_IC_CaptureCallback()
相关HAL库函数介绍
关键结构体介绍
4.6.4,编程实战:高级定时器PWM输入模式实验(掌握)
相关文章:
stm32——hal库学习笔记(定时器)
这里写目录标题 一、定时器概述(了解)1.1,软件定时原理1.2,定时器定时原理1.3,STM32定时器分类1.4,STM32定时器特性表1.5,STM32基本、通用、高级定时器的功能整体区别 二、基本定时器࿰…...

方法鉴权:基于 Spring Aop 的注解鉴权
在Spring框架中,可以使用面向切面编程(AOP)来实现注解鉴权。这通常涉及到定义一个切面(Aspect),该切面会在方法执行前进行拦截,并根据注解value值来决定是否允许执行该方法。 简单思路…...

多模态相关论文笔记
(cilp) Learning Transferable Visual Models From Natural Language Supervision 从自然语言监督中学习可迁移的视觉模型 openAI 2021年2月 48页 PDF CODE CLIP(Contrastive Language-Image Pre-Training)对比语言图像预训练模型 引言 它比ImageNet模型效果更好,…...

maven 打包命令
Maven是基于项目对象模型(POM project object model),可以通过一小段描述信息(配置)来管理项目的构建,报告和文档的软件项目管理工具。 Maven的核心功能便是合理叙述项目间的依赖关系,通俗点讲,就是通过po…...
)
开源模型应用落地-业务优化篇(六)
一、前言 经过线程池优化、请求排队和服务实例水平扩容等措施,整个AI服务链路的性能得到了显著地提升。但是,作为追求卓越的大家,绝不会止步于此。我们的目标是在降低成本和提高效率方面不断努力,追求最佳结果。如果你们在实施AI项目方面有经验,那一定会对GPU服务器的高昂…...

编程笔记 Golang基础 015 数据类型:布尔类型
编程笔记 Golang基础 015 数据类型:布尔类型 在Go语言中,布尔类型(bool)是一种基本数据类型,用于表示逻辑值,即真或假、是或否的情况。它主要用于条件判断和逻辑运算。 定义与取值: Go语言中的布…...
腾讯云OSS文件上传功能
腾讯云COS介绍 腾讯云COS(Cloud Object Storage)是一种基于对象的存储服务,用于存储和管理海量的非结构化数据,如图片、音视频文件、备份数据等。它具有以下特点和优势: 高可靠性:采用分布式存储架构&…...

2023 re:Invent 用 PartyRock 10 分钟构建你的 AI 应用
前言 一年一度的亚马逊云科技的 re:Invent 可谓是全球云计算、科技圈的狂欢,每次都能带来一些最前沿的方向标,这次也不例外。在看完一些 keynote 和介绍之后,我也去亲自体验了一些最近发布的内容。其中让我感受最深刻的无疑是 PartyRock 了。…...

如何使用idea连接服务器上的mysql?
安全组进行开放 具体步骤 关闭防火墙 开放端口号 重启防火墙 firewall-cmd --reload在mysql进行修改配置 update user set host % where user root;flush privileges;使得其他网络也可以连接这个数据库 另外如果想要sqlyog或者其他图形化界面要连接到数据库可以看下面这…...
主流开发语言和开发环境介绍
主流开发语言和开发环境介绍文章目录 ⭐️ 主流开发语言:2024年2月编程语言排行榜(TIOBE前十)⭐️ 主流开发语言开发环境介绍1.Python1.1 **IDLE**1.2 **PyCharm**1.3 **Anaconda**1.4 **Jupyter Notebook**1.5 **Sublime Text** 2.C2.1 **De…...

samber/lo 库的使用方法: 处理 channel
samber/lo 库的使用方法: 处理 channel samber/lo 是一个 Go 语言库,提供了一些常用的集合操作函数,如 Filter、Map 和 FilterMap。汇总目录页面 这个库函数太多,因此我决定按照功能分别介绍,本文介绍的是 samber/lo…...
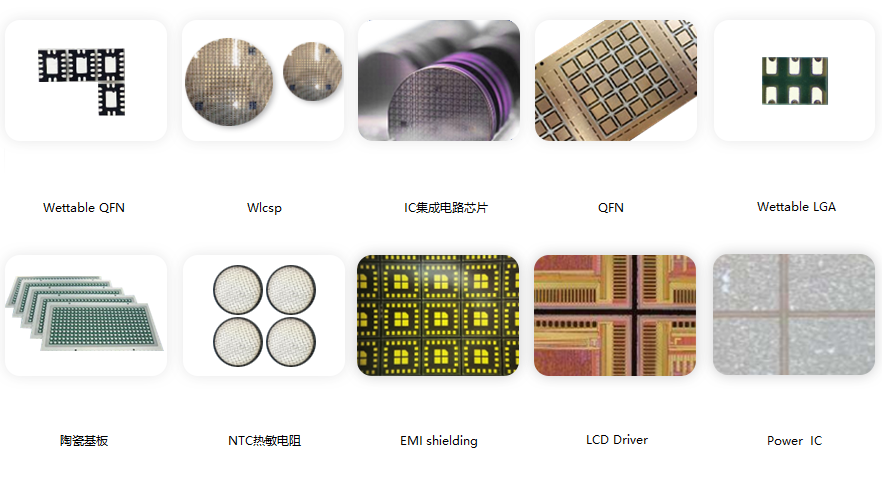
铌酸锂芯片与精密划片机:科技突破引领半导体制造新潮流
在当今快速发展的半导体行业中,一种结合了铌酸锂芯片与精密划片机的创新技术正在崭露头角。这种技术不仅引领着半导体制造领域的进步,更为其他产业带来了前所未有的变革。 铌酸锂芯片是一种新型的微电子芯片,它使用铌酸锂作为基底材料&#x…...
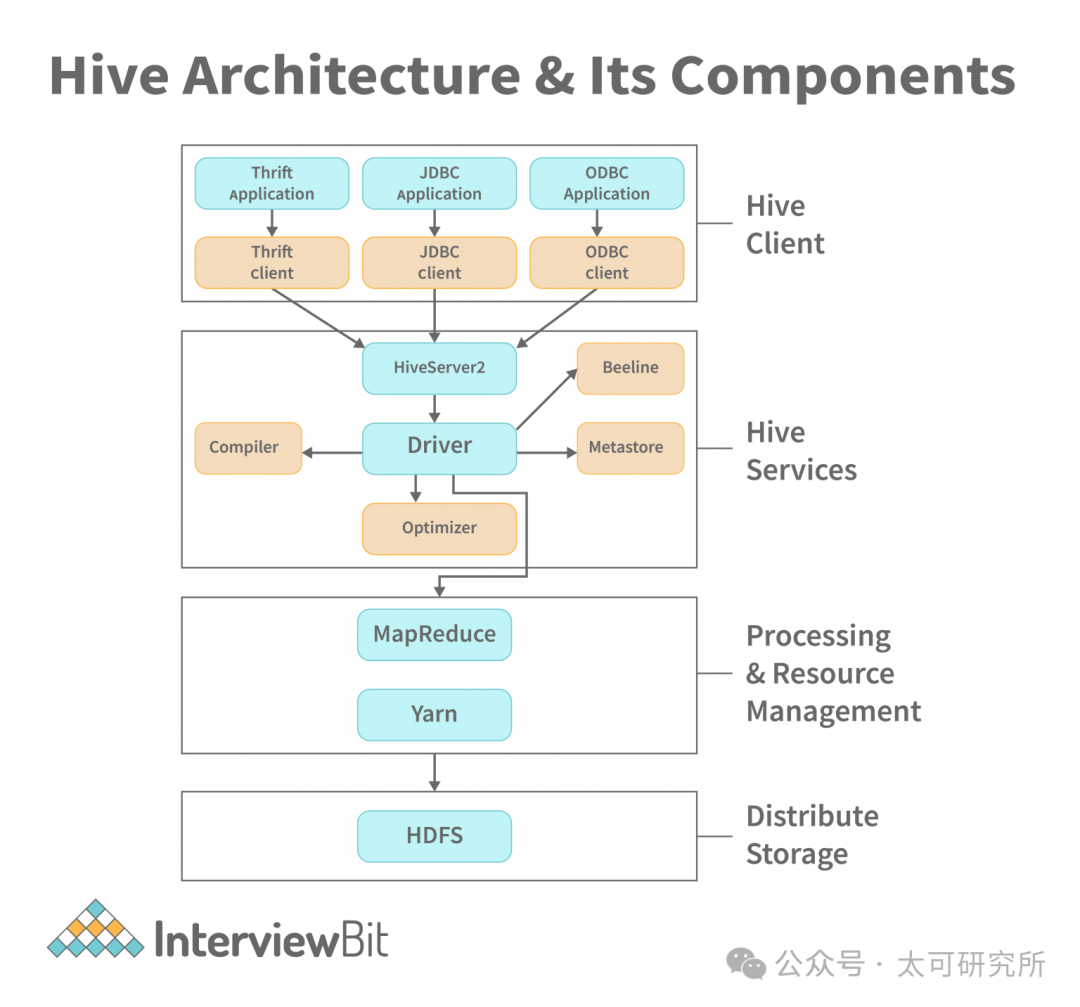
大数据计算技术秘史(上篇)
在之前的文章《2024 年,一个大数据从业者决定……》《存储技术背后的那些事儿》中,我们粗略地回顾了大数据领域的存储技术。在解决了「数据怎么存」之后,下一步就是解决「数据怎么用」的问题。 其实在大数据技术兴起之前,对于用户…...
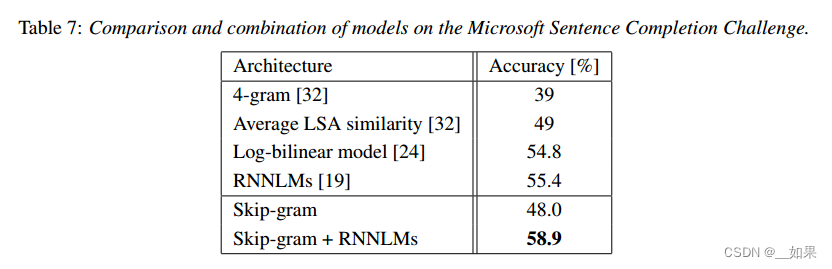
论文精读--word2vec
word2vec从大量文本语料中以无监督方式学习语义知识,是用来生成词向量的工具 把文本分散嵌入到另一个离散空间,称作分布式表示,又称为词嵌入(word embedding)或词向量 Abstract We propose two novel model architec…...

Android13 针对low memory killer内存调优
引入概念 在旧版本的安卓系统中,当触发lmk(low memory killer)的时候一般认为就是内存不足导致,但是随着安卓版本的增加lmk的判断标准已经不仅仅是内存剩余大小,io,cpu同样会做评判,从而保证设备…...
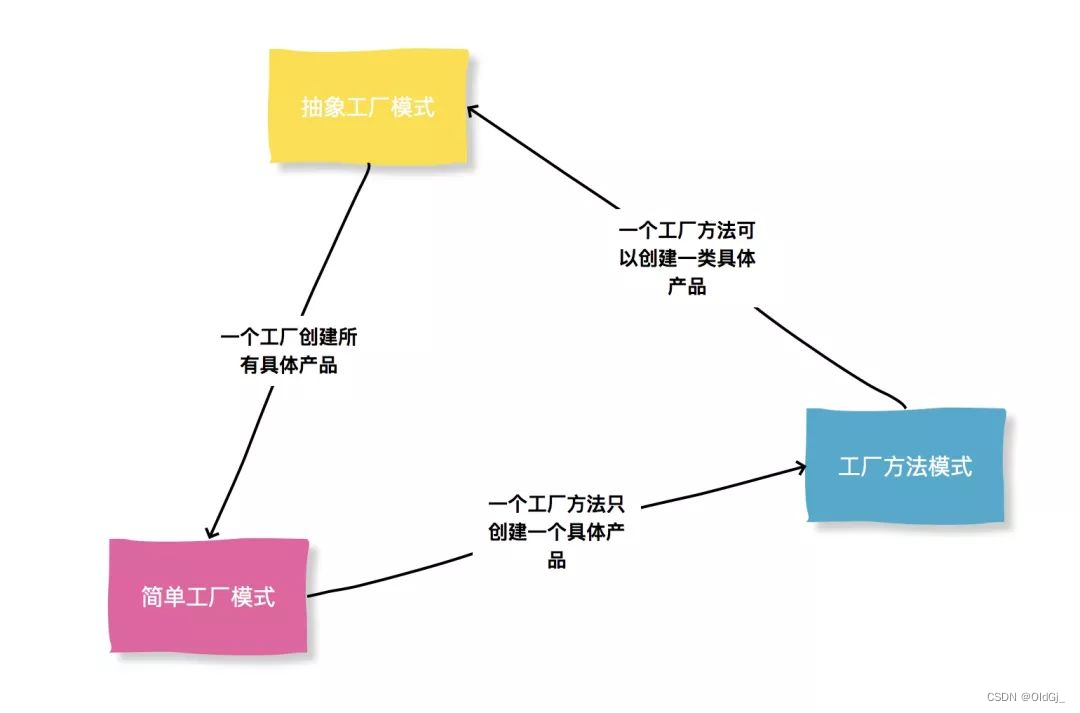
【深入理解设计模式】 工厂设计模式
工厂设计模式 工厂设计模式是一种创建型设计模式,它提供了一种在不指定具体类的情况下创建对象的接口。在工厂设计模式中,我们定义一个创建对象的接口,让子类决定实例化哪一个类。工厂方法使一个类的实例化延迟到其子类。 工厂设计模式的目…...
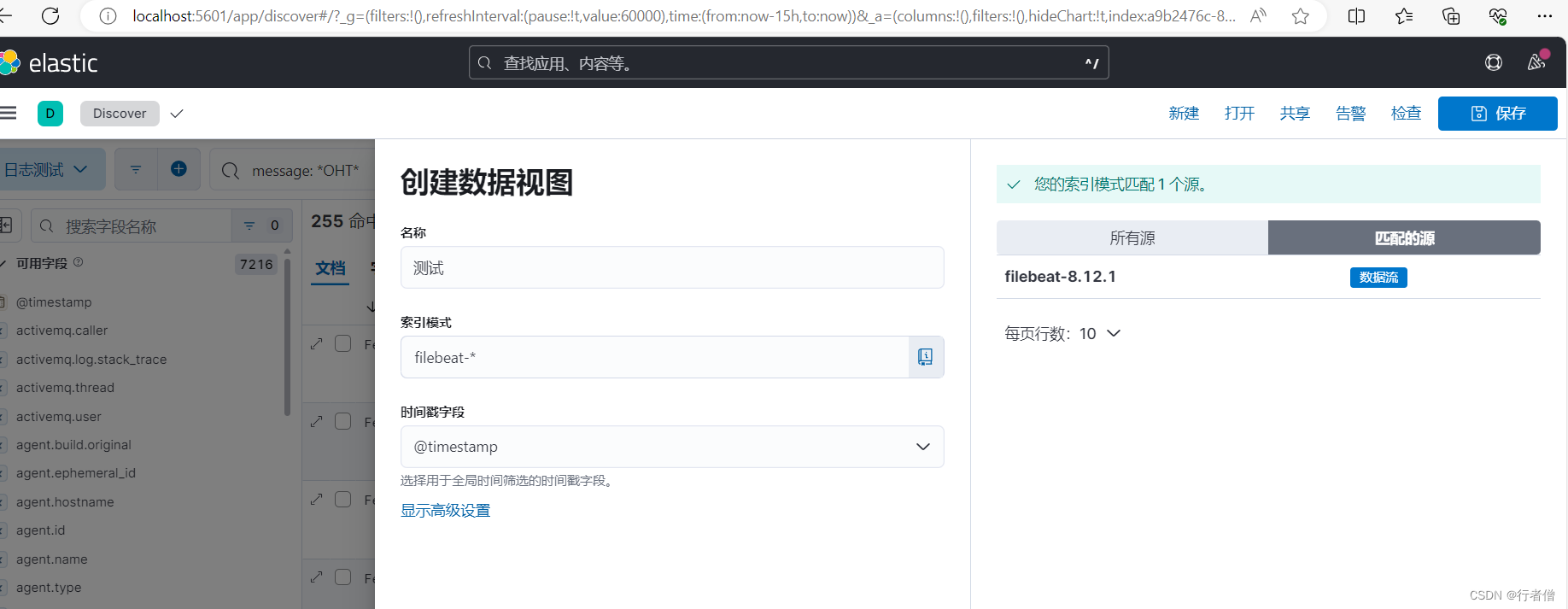
Windows下搭建EFK实例
资源下载 elasticSearch :下载最新版本的就行 kibana filebeat:注意选择压缩包下载 更新elasticsearch.yml,默认端口9200: # Elasticsearch Configuration # # NOTE: Elasticsearch comes with reasonable defaults for most …...
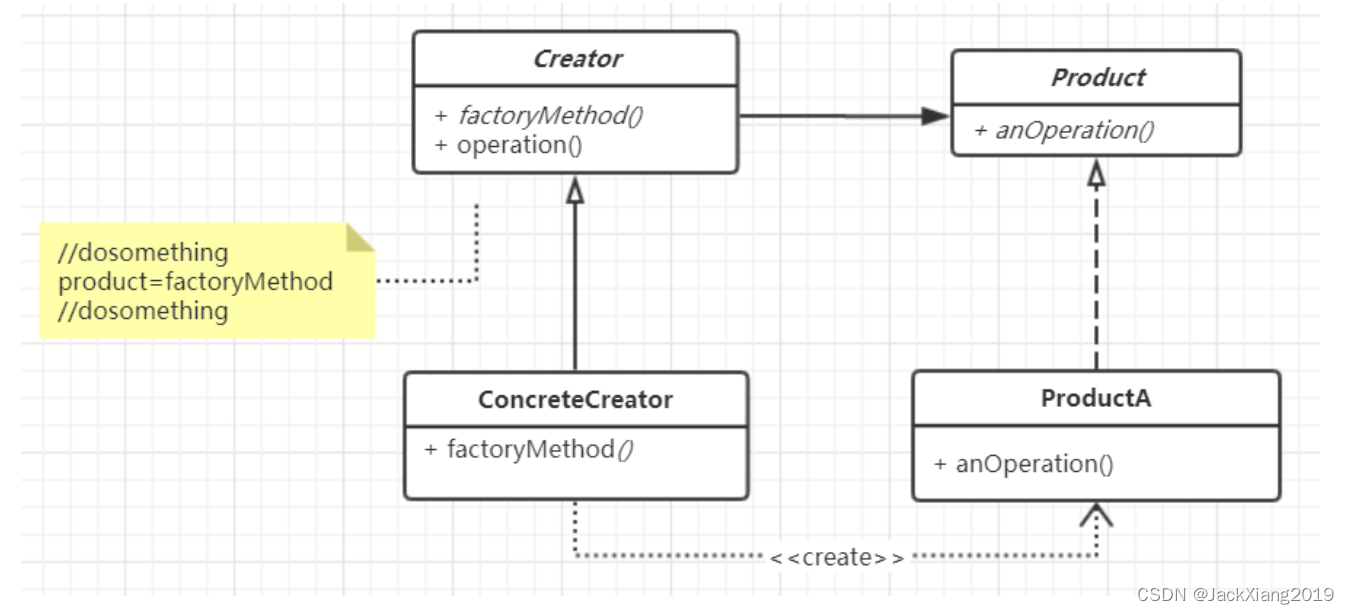
工厂方法模式Factory Method
1.模式定义 定义一个用于创建对象的接口,让子类决定实例化哪一个类。Factory Method 使得一个类的实例化延迟到子类 2.使用场景 1.当你不知道改使用对象的确切类型的时候 2.当你希望为库或框架提供扩展其内部组件的方法时 主要优点: 1.将具体产品和创建…...

Vue的个人笔记
Vue学习小tips ctrl s ----> 运行 alt b <scrip> 链接 <script src"https://cdn.jsdelivr.net/npm/vue2.7.16/dist/vue.js"></script> 插值表达式 指令...

linux platform架构下I2C接口驱动开发
目录 概述 1 认识I2C协议 1.1 初识I2C 1.2 I2C物理层 1.3 I2C协议分析 1.3.1 Start、Stop、ACK 信号 1.3.2 I2C协议的操作流程 1.3.3 操作I2C注意的问题 2 linux platform驱动开发 2.1 更新设备树 2.1.1 添加驱动节点 2.1.2 编译.dts 2.1.3 更新板卡中的.dtb 2.2 …...

光电效应实验避坑指南:从汞灯预热到遏止电压判读,新手常犯的5个错误
光电效应实验避坑指南:从汞灯预热到遏止电压判读的5个关键误区 在大学的物理实验室里,光电效应实验就像一位性格古怪的教授——看似简单明了,实则暗藏玄机。许多同学满怀信心地走进实验室,却在数据采集阶段屡屡碰壁,最…...

3分钟搞定:Windows免iTunes安装苹果驱动终极指南
3分钟搞定:Windows免iTunes安装苹果驱动终极指南 【免费下载链接】Apple-Mobile-Drivers-Installer Powershell script to easily install Apple USB and Mobile Device Ethernet (USB Tethering) drivers on Windows! 项目地址: https://gitcode.com/gh_mirrors/…...

如何使用 Graphviz 在 5 分钟内创建专业流程图:Python 数据可视化终极指南
如何使用 Graphviz 在 5 分钟内创建专业流程图:Python 数据可视化终极指南 【免费下载链接】graphviz Simple Python interface for Graphviz 项目地址: https://gitcode.com/gh_mirrors/gr/graphviz 想要快速创建专业流程图吗?Graphviz 是一个强…...

FigmaCN中文界面本地化解决方案:解决设计师语言障碍的技术实现
FigmaCN中文界面本地化解决方案:解决设计师语言障碍的技术实现 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 对于中文设计师和开发团队来说,Figma作为一款国际…...

安卓APP通过JNI调用ATSHA204A加密芯片实战指南
1. 项目概述与核心需求解析 在安卓应用开发领域,尤其是涉及物联网、金融支付、版权保护等高安全要求的场景,单纯依靠软件层面的加密算法已经不足以应对日益复杂的攻击手段。硬件加密芯片,如ATSHA204A,以其物理隔离、密钥不可读取等…...

东山精密冲刺港股:第一季营收131亿 净利11亿 市值超4000亿
雷递网 雷建平 5月20日苏州东山精密制造股份有限公司(简称:“东山精密”)日前更新招股书,准备在港交所上市。截至目前,东山精密股价为219.33元,市值约4016亿元。一旦在港股上市,东山精密将形成“AH”的格局…...

cimgui生成器完全解析:从Lua脚本到C接口的魔法转换 [特殊字符]
cimgui生成器完全解析:从Lua脚本到C接口的魔法转换 🎯 【免费下载链接】cimgui c-api for imgui (https://github.com/ocornut/imgui) Look at: https://github.com/cimgui for other widgets 项目地址: https://gitcode.com/gh_mirrors/ci/cimgui …...

别再死记硬背公式了!用‘推磨小矮人’和‘磁极跳舞’理解PMSM的电角度与机械角度
用“推磨小矮人”和“磁极跳舞”轻松掌握PMSM角度转换 电机控制领域的初学者常被永磁同步电机(PMSM)中电角度与机械角度的关系困扰。传统教材中“电角度极对数机械角度”的公式虽然简洁,却缺乏直观的物理图像支撑。本文将用两个生活化的比喻…...

UMI 采集技术落地应用 核数聚助力人形机器人快速迭代
在具身智能从实验室走向产业落地的关键期,数据饥渴已成为行业公认的核心瓶颈。传统真机遥操作采集成本高、效率低、泛化性差,仿真数据又存在物理真实性不足的问题。此时,UMI(Universal Manipulation Interface,通用操作…...

论性能测试
性能测试 随着互联网应用规模化、业务场景复杂化,系统在高并发、大数据量场景下的性能表现直接影响用户体验与业务连续性一一 响应延迟、并发处理能力不足、资源耗尽等问题可能导致用户流失或重大业务损失。性能测试作为软件质量保障的核心环节,通过模拟…...