【电子学会】2022年12月图形化二级 -- 老鹰捉小鸡
老鹰捉小鸡
小鸡正在农场上玩耍,突然从远处飞来一只老鹰,小鸡要快速回到鸡舍中,躲避老鹰的抓捕。
1. 准备工作
(1)删除默认白色背景,添加背景Farm;
(2)删除默认角色小猫,添加角色Chick、Griffin。
2. 功能实现
(1)角色的初始位置和方向如下图所示;

(2)老鹰不断向右下移动,碰到边缘就反弹,不能倒立;
(3)用上、下、左、右键,控制小鸡朝上下左右四个不同的方向移动,不能倒立;
(4)老鹰碰到小鸡后,老鹰会说“我抓住你了!” 2秒,停止全部脚本;

(5)小鸡走进鸡舍后,会说“我安全啦!”2秒,然后消失,停止全部脚本。

3. 设计思路与实现
(1)角色分析
角色:Chick、Griffin
(2)背景分析
背景:Farm
(3)所用积木块介绍
a. 运动类

- 角色移动指定的步数,正数就是向前,负数就是向后。
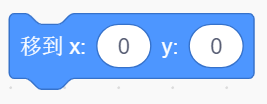
- 将角色移动到舞台中指定的X/Y坐标位置,默认坐标(x:0, y:0)。
- x的范围(-240, 240);y的范围(-180, 180)。

- 将角色朝向某个指定的方向。
- 通常用作控制角色在舞台中的上下左右朝向。即0朝上,90朝右(默认),180朝下,-90朝左。
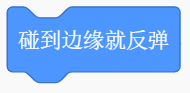
- 角色碰到边缘后就往回走。
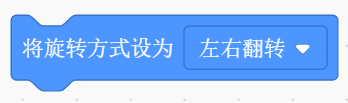
- 设定角色旋转方式为“左右翻转”,下拉可选“不可旋转”,“任意旋转”。
- 这三种旋转方式区别在于:左右翻转(正常转向后角色上下结构不变),不可旋转(不能进行旋转),任意旋转(转向后上下颠倒,Scratch默认旋转方式)。
b. 外观类
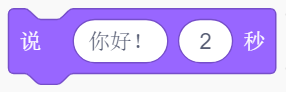
- 在规定的时间内在舞台上显示输入的文字(说话云朵)。
- 将角色的大小调整为指定的值。
- 该积木块通常在角色初始化时使用。

- 在舞台中显示当前角色。

- 在舞台中隐藏当前角色。
c. 事件类

- 程序开始积木块。
- 点击舞台区的绿旗,执行以绿旗开始的所有程序脚本。
d. 控制类

- 循环积木块:一遍一遍地执行包起来的积木序列。
- 重复执行模块里面的积木指令,相当于一个死循环,永不停止,除非在某个地方结束脚本。

- 条件判断语句,如果条件返回值为真(bool值),那么执行模块里面的积木指令,如果条件不成立,返回值为假,执行条件判断模块后面的程序指令。

- 循环积木块:一遍一遍地执行包起来的积木序列。
- 判断条件是否为真,如果尖尖角里面的返回值为真则停止循环。

- 将所有的角色和背景的脚本停止执行,下拉倒三角还可以选择“停止当前角色的其它脚本”和“这个脚本”。
e. 侦测类

- 检测是否碰到指定的颜色,如果是返回bool值“真”,否则返回bool值“假”。
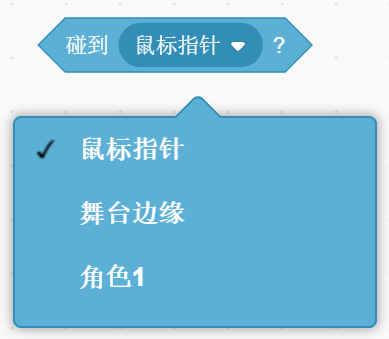
- 判断当前角色是否碰到鼠标,下拉可以选择其它角色和舞台边缘。

- 侦测是否按下了键盘的某个按键,获取一个为真或假的布尔值。
- 通过下拉三角可以选择空格键、方向键、任意键、字母键和数字键。
(4)角色、舞台背景设置
a. 角色设置
我们删除默认的角色小猫,在角色仓库中选择题目要求的角色“Chick”、“Griffin”。

b. 舞台背景设置
我们按照题目的要求选择舞台背景“Farm”。

按照题目要求删除默认白色背景。

(5)脚本编写
编程题的功能实现有多种方案,标准答案所示参考程序仅是其中的一种,最终以是否完成题目要求的功能实现效果作为评分依据。
a. 角色:Griffin

当绿旗被点击时:
- 开始:点击绿旗,也就是程序启动,就要执行后续的程序指令。
- 初始化大小:60
- 初始化位置:X = -7,Y = 103。
- 旋转方式:左右翻转。(老鹰不能倒立)
- 初始化方向:135°。(老鹰不断向右下移动)
- 重复执行直到 碰到Chick:
- 移动5步。
- 碰到边缘就反弹。(老鹰不断向右下移动,碰到边缘就反弹)
- 说“我抓住你了”,2秒。(老鹰碰到小鸡后,老鹰会说“我抓住你了!” 2秒,停止全部脚本。)
b. 角色:Chick


当绿旗被点击时:
- 开始:点击绿旗,也就是程序启动,就要执行后续的程序指令。
- 初始位置:X = 191,Y = -134。
- 旋转方式:左右翻转。
- 初始方向:-90°。
- 重复执行:(用上、下、左、右键,控制小鸡朝上下左右四个不同的方向移动,不能倒立)
- 如果按下“向上”键:设置旋转方式为“任意旋转”,面向0°方向,移动10步。
- 如果按下“向下”键:设置旋转方式为“任意旋转”,面向180°方向,移动10步。
- 如果按下“向左”键:设置旋转方式为“左右翻转”,面向-90°方向,移动10步。
- 如果按下“向右”键:设置旋转方式为“左右翻转”,面向90°方向,移动10步。

当绿旗被点击时:
- 开始:点击绿旗,也就是程序启动,就要执行后续的程序指令。
- 初始状态:显示
- 重复执行:(小鸡走进鸡舍后,会说“我安全啦!”2秒,然后消失,停止全部脚本。)
- 如果碰到黑色,说“我安全了”,2秒,隐藏,停止全部脚本。
4. 评分标准
(1)背景和角色添加正确(1分);
(2)点击绿旗后,角色的初始位置正确(1分),方向正确(1分),老鹰不断移动,旋转方式正确,碰到边缘反弹(2分);
(3)按下上、下、左、右键可以让小鸡朝上下左右不同方向移动(2分),旋转方式正确(1分);
(4)老鹰碰到小鸡后,说出“我抓住你了!”(2分),停止全部脚本(1分);
(5)小鸡碰到鸡舍黑色部分后,说出“我安全啦!”(2分),隐藏(1分),停止全部脚本(1分)。
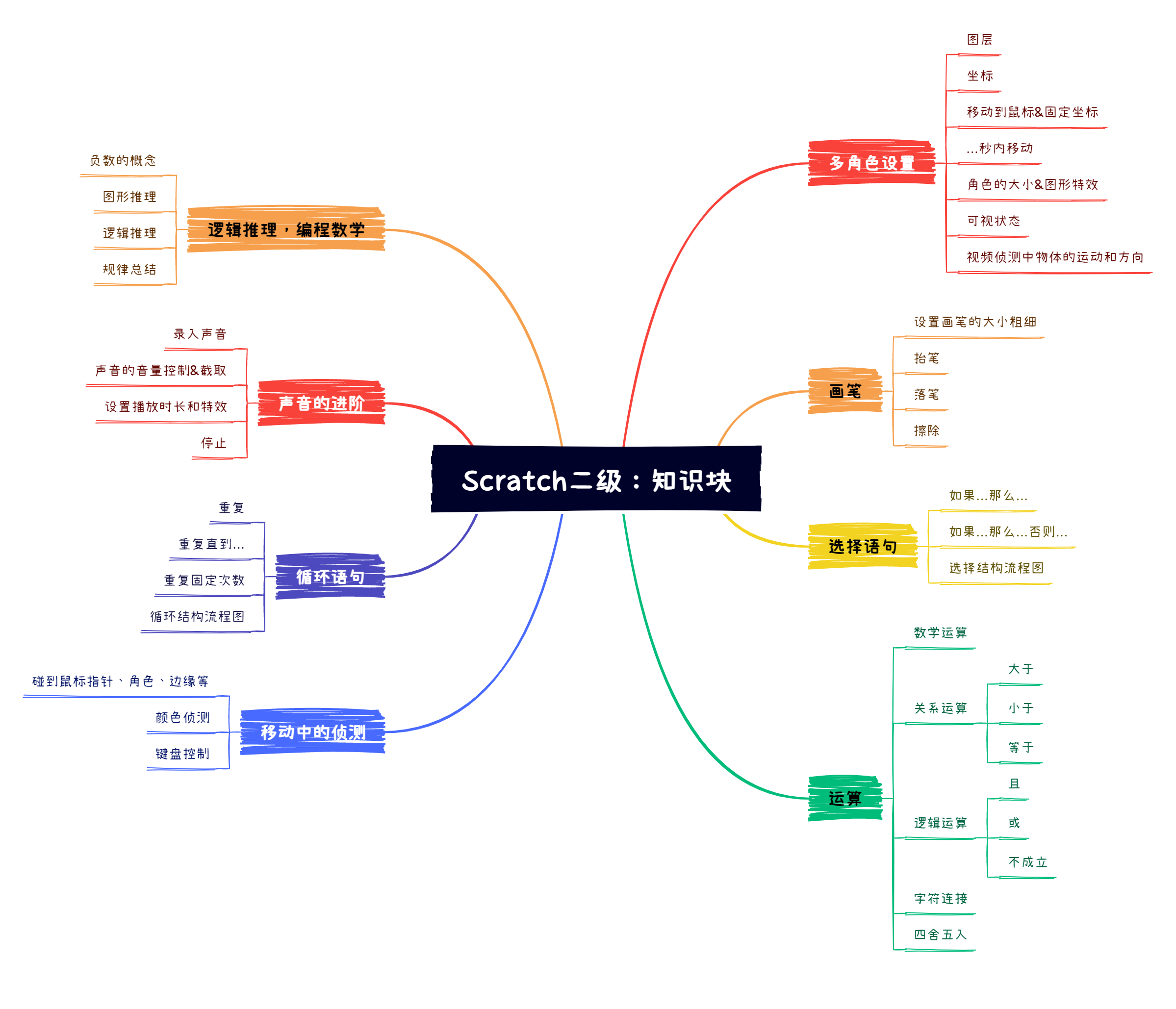
5. 知识块
相关文章:
【电子学会】2022年12月图形化二级 -- 老鹰捉小鸡
老鹰捉小鸡 小鸡正在农场上玩耍,突然从远处飞来一只老鹰,小鸡要快速回到鸡舍中,躲避老鹰的抓捕。 1. 准备工作 (1)删除默认白色背景,添加背景Farm; (2)删除默认角色小…...
C++的双端队列
双端队列介绍1.双端队列知识需知2.大试牛刀1.双端队列知识需知 由于队列是一种先进先出(FIFO)的数据结构,因此无法直接从队列的底部删除元素。如果希望从队列的底部删除元素,可以考虑使用双端队列(deque)。…...
)
【独家】华为OD机试 - 拼接 URL(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...
为什么使用Junit单元测试?Junit的详解
Hi I’m Shendi 为什么使用Junit单元测试?Junit的详解 Junit简介 Junit是一个Java语言的单元测试框架。 单元测试是一个对单一实体(类或方法)的测试 JUnit是由 Erich Gamma 和 Kent Beck 编写的一个回归测试框架(regression test…...

怎么学好嵌入式Linux系统和驱动
嵌入式专业是一门实践性非常强的学科,只有多动手,多实践,多编程,多调试,多看书,多思考才能真正掌握好嵌入式开发技术。 现在很多同学也意识到了学校培养模式和社会需求脱节问题,有一部分同学也先…...

Spring Aware总结
概述 Spring中Aware到底是什么意思? 我们在看Spring源码的时候,经常可以看到xxxAwarexxx的身影,通常我会很疑惑,Aware到底是什么意思呢? 比如图片中这些包含Aware关键字的类或者接口。 我对下面3个类或接口进行了解…...

【RocketMQ】源码详解:Broker端消息刷盘流程
消息刷盘 同步入口:org.apache.rocketmq.store.CommitLog.GroupCommitService 异步入口:org.apache.rocketmq.store.CommitLog.FlushRealTimeService 刷盘有同步和异步两种,在实例化Commitlog的时候,会根据配置创建不同的服务 p…...
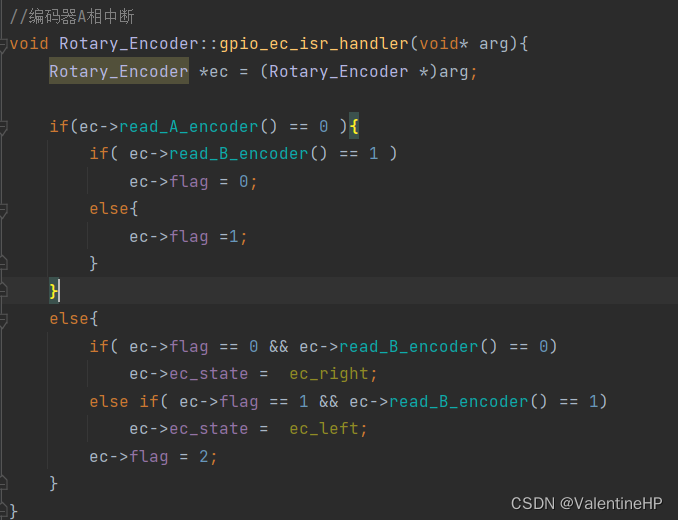
编码器SIQ-02FVS3驱动
一.简介 此编码器可以是功能非常强大,可以检测左右转动,和按键按下,所以说这一个编码器可以抵三个按键,而且体积非常小,使用起来比三个按键要高大尚,而且驱动也简单。唯一不足的点就是价格有点小贵6-8元才…...

【2021.9.7】记一次exe手动添加shellcode
【2021.9.7】记一次exe手动添加shellcode 文章目录【2021.9.7】记一次exe手动添加shellcode0.大致思路1.获取MessageBox的真实地址VA2.通过OD在代码段添加shellcode3.dump出数据,设置程序OEP4.测试dump出来的exe5.方法总结测试的exe和添加了shellcode的exe:链接&…...
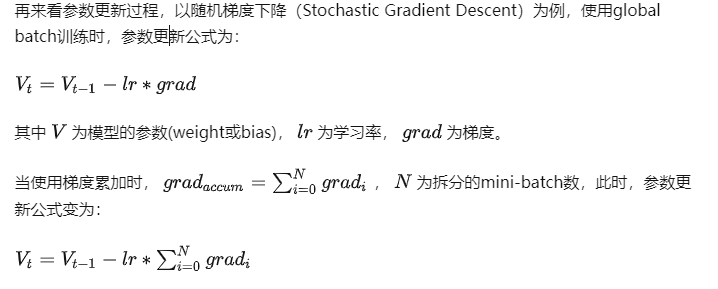
常用训练tricks,提升你模型的鲁棒性
目录一、对抗训练FGM(Fast Gradient Method): ICLR2017代码实现二、权值平均1.指数移动平均(Exponential Moving Average,EMA)为什么EMA会有效?代码实现2. 随机权值平均(Stochastic Weight Averaging,SWA&a…...
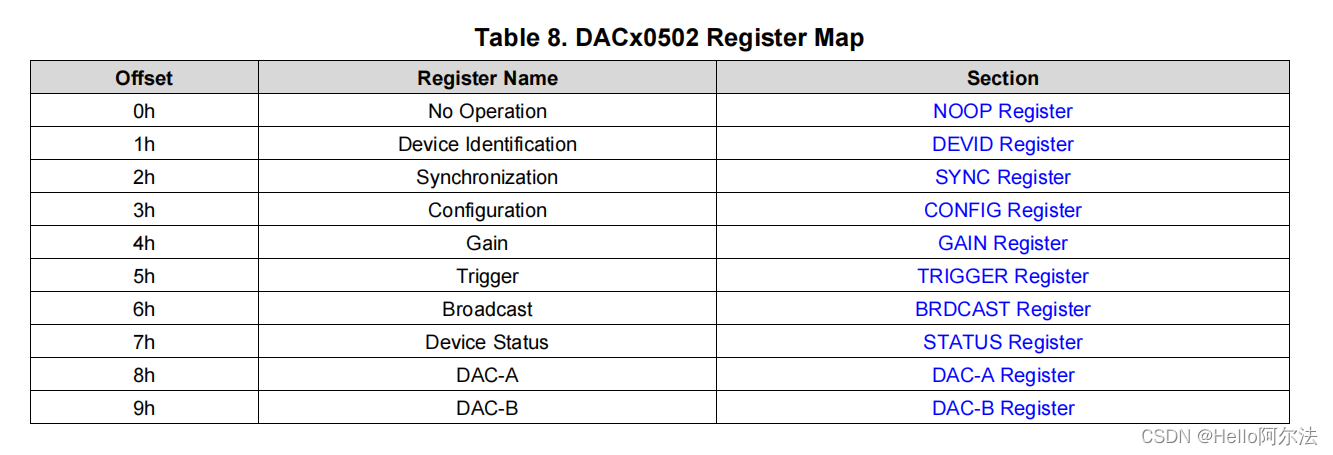
具有精密内部基准的 DACx0502 简介及驱动应用示例
DACx0502 说明 16 位 DAC80502、14 位 DAC70502 和 12 位DAC60502 (DACx0502) 数模转换器 (DAC) 均为具有电压输出的高精度、低功耗器件。 DACx0502 线性度小于 1LSB。凭借高精度和微型封装特性,DACx0502 非常适合以下 应用: 增益和失调电压校准、电流…...
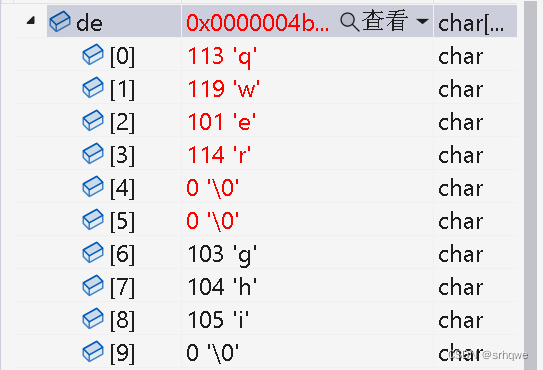
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp()
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp() 在了解strncpy、strncat()、前,需要先了解strcpy()、strncat(): C语言函数:字符串函数及模拟实现strlen() 、strcpy()、 strcat()_srhqwe的博客-CSDN博客 strncp…...

学术论文插图要求简介
1. 类型 位图和矢量图是两种不同的图像类型,它们在存储和处理图像时使用不同的方法。以下是它们之间的详细区别: 图像构成方式:位图使用像素(或图像的最小单元)来构建图像,每个像素都有自己的颜色和亮度值。…...
)
【独家】华为OD机试 - 斗地主 2(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...

力扣-计算特殊奖金
大家好,我是空空star,本篇带大家了解一道简单的力扣sql练习题。 文章目录前言一、题目:1873. 计算特殊奖金二、解题1.正确示范①提交SQL运行结果2.正确示范②提交SQL运行结果3.正确示范③提交SQL运行结果4.正确示范④提交SQL运行结果5.其他总…...

华为校招机试真题目录
专栏介绍 本专栏将逐步收集历年华为校招算法真题 专栏权益 每篇博客都包含: 算法考点解析(文字+画图)算法源码(支持 Java / JS / Python)每晚9:00 ~ 11:00 在线答疑 真题目录 时间题目考点 or 实现2022.11.27...
EdgeYOLO学习笔记
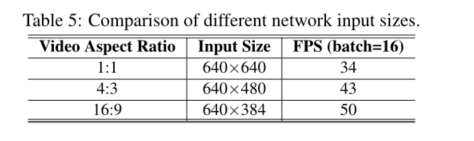
EdgeYOLO学习笔记 EdgeYOLO: An Edge-Real-Time Object Detector Abstract 本文基于最先进的YOLO框架,提出了一种高效、低复杂度、无锚的目标检测器,该检测器可以在边缘计算平台上实时实现。为了有效抑制训练过程中的过拟合,我们开发了一种…...

【分布式】什么是分布式锁?正文揭晓
分布式锁的概念 分布式锁其实可以理解为:控制分布式系统有序的去对共享资源进行操作,通过互斥来保持一致性。 举个例子:假设共享的资源就是一个房子,里面有各种书,分布式系统就是要进屋看书的人, 分布式锁…...

超详细JDK1.8所有版本下载地址
JDK1.8即为JDK8,JDK8是目前是最成熟最稳定的版本,本文将详细介绍JDK1.8历史版本的下载方式。 在此附上JDK1.8安装与配置教程 超详细JDK1.8安装与配置 一、JDK官网 首先打开oracle官网,官网首页地址为 JDK官网首页地址 点击Products 点击…...
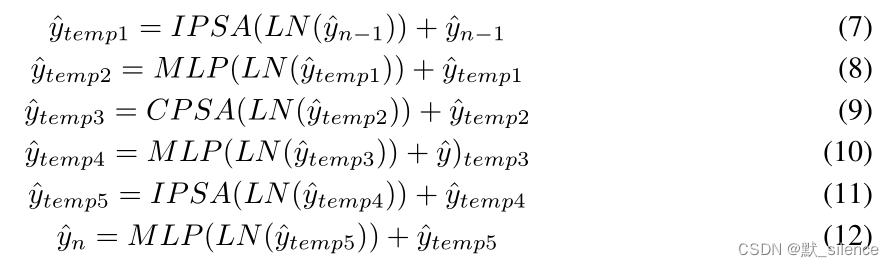
论文解析[11] CAT: Cross Attention in Vision Transformer
发表时间:2021 论文地址:https://arxiv.org/abs/2106.05786v1 文章目录摘要3 方法3.1 总体结构3.1.1 Inner-Patch Self-Attention Block3.1.2 Cross-Patch Self-Attention Block3.1.3 Cross Attention based Transformer结论摘要 使用图像patch来替换tr…...

IQuest-Coder-V1-40B-Instruct快速上手:LoRA微调打造专属编程助手
IQuest-Coder-V1-40B-Instruct快速上手:LoRA微调打造专属编程助手 1. 认识IQuest-Coder-V1-40B-Instruct 1.1 新一代代码大模型的特点 IQuest-Coder-V1-40B-Instruct是一款专为软件工程和竞技编程设计的大型语言模型。它基于创新的代码流多阶段训练范式构建&…...

解决VSCode配置gcc编译环境中的常见问题:以MinGW安装失败为例
解决VSCode配置gcc编译环境中的常见问题:以MinGW安装失败为例 在开发C/C项目时,VSCode配合gcc编译器是一个轻量高效的组合方案。但许多开发者在配置过程中,特别是在Windows环境下安装MinGW时,常常会遇到各种"拦路虎"。…...

RTX4090D性能实测:OpenClaw调用Qwen3-32B镜像的token消耗优化
RTX4090D性能实测:OpenClaw调用Qwen3-32B镜像的token消耗优化 1. 测试背景与设备环境 去年底入手RTX4090D显卡后,我一直想验证它在本地大模型推理场景的实际表现。最近在星图平台发现预置Qwen3-32B模型的优化镜像,正好配合OpenClaw做自动化…...

基于OFA的智能零售解决方案:商品图像自动问答系统
基于OFA的智能零售解决方案:商品图像自动问答系统 1. 引言 走进任何一家现代零售店,你都会看到顾客拿着商品反复查看标签、比较价格、寻找成分信息。这种场景每天都在全球数百万家商店中重复上演。店员们疲于应对各种"这个产品有没有过敏源&#…...

OpenClaw+Phi-3-vision-128k-instruct:智能相册的自动化分类与标签系统
OpenClawPhi-3-vision-128k-instruct:智能相册的自动化分类与标签系统 1. 为什么需要智能相册管理 作为一个摄影爱好者,我的照片库在过去十年里积累了超过5万张照片。每次想找某张特定场景的照片时,都要花费大量时间翻找文件夹。更糟糕的是…...

VSCode 中使用 MATLAB 安装流程
文章目录 运行程序 修改 Code-Runner 文件 使用 Copilot 如何开启 MATLAB 调试功能 Matlab: Linter Config(代码检查器配置):保持空白就好。 Linter(在这里指的是 MATLAB 的 mlint)是一个静态代码分析工具。它会在你写代码时,自动用波浪线提示语法错误或者给出优化建议(…...

Python 日志神器 Loguru 超详细使用教程
前言 在 Python 开发中,日志记录是排查问题、监控程序运行的核心工具,但原生 logging 库配置繁琐、语法复杂,新手很难快速上手。Loguru 是一款极简、强大、开箱即用的第三方日志库,无需复杂配置,一行代码就能实现专业级…...
模式打造一个能“思考”的AI助手)
Dify Agent实战:手把手教你用思维链(CoT)模式打造一个能“思考”的AI助手
Dify Agent实战:用思维链(CoT)构建会思考的AI助手 在当今AI技术快速发展的背景下,如何让AI助手不仅能回答问题,还能像人类一样"思考"并解决复杂问题?这正是思维链(Chain of Thought, CoT)技术要解…...

OpenClaw多通道监控:百川2-13B-4bits同时响应飞书与网页指令
OpenClaw多通道监控:百川2-13B-4bits同时响应飞书与网页指令 1. 为什么需要多通道监控 上周三凌晨两点,我被连续不断的手机振动惊醒——飞书机器人正在疯狂推送任务失败告警。原来团队同时通过飞书群和网页控制台提交了数据清洗任务,导致百…...
)
电动汽车模型考虑多种需求响应及微网的虚拟电厂日前优化调度模型的MATLAB代码(含空调负荷)
MATLAB代码:含多种需求响应及电动汽车的微网/虚拟电厂日前优化调度 关键词:需求响应 空调负荷 电动汽车 微网优化调度 虚拟电厂调度 仿真平台:MATLABCPLEX 主要内容:代码主要做的是一个微网/虚拟电厂的日前优化调度模型&#…...