常用训练tricks,提升你模型的鲁棒性
目录
- 一、对抗训练
- FGM(Fast Gradient Method): ICLR2017
- 代码实现
- 二、权值平均
- 1.指数移动平均(Exponential Moving Average,EMA)
- 为什么EMA会有效?
- 代码实现
- 2. 随机权值平均(Stochastic Weight Averaging,SWA)
- SWA实现
- 使用swa模板
- 三、训练加速
- 1.混合精度(amp)
- 为什么要使用AMP?
- 使用方法
- 2. 数据并行(Data Parallel, DP和Distributed Data Parallel,DDP)
- 代码实现
- 四、显卡不够用怎么增大batch size
- 梯度累加法
- 代码实现
一、对抗训练
对抗训练是一种引入噪声的训练方式,可以对参数进行正则化,提升模型鲁棒性和泛化能力。对抗训练的假设是:给输入加上扰动之后,输出分布和原Y的分布一致。
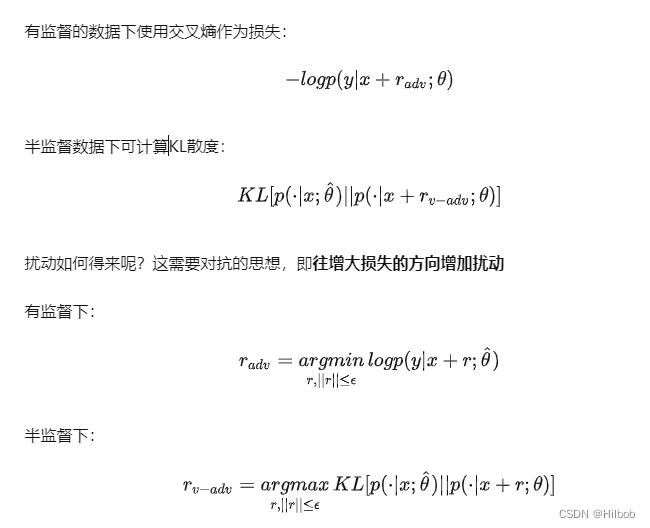
θ尖是常数,目的是在计算对抗扰动时虽然计算了梯度,但不对参数进行更新,因为当前得到的对抗扰动是对旧参数最优的。
**用一句话形容对抗训练的思路,就是在输入上进行梯度上升(增大loss),在参数上进行梯度下降(减小loss)。**由于输入会进行embedding lookup(embedding lookup从字面意思上讲,就是查找对应的embedding),所以实际的做法是在embedding table上进行梯度上升。
FGM(Fast Gradient Method): ICLR2017
FGM是根据具体的梯度进行scale,得到更好的对抗样本。假设对于输入的梯度为:
其扰动为:
伪代码:对于每个x:
1.计算x的前向loss、反向传播得到梯度
2.根据embedding矩阵的梯度计算出r,并加到当前embedding上,相当于x+r
3.计算x+r的前向loss,反向传播得到对抗的梯度,累加到(1)的梯度上
4.将embedding恢复为(1)时的值
5.根据(3)的梯度对参数进行更新
代码实现
class FGM(object):def __init__(self, module):self.module = moduleself.backup = {}# 记得这里的embedding名字设置为自己网络的def attack(self,epsilon=1.,emb_name='word_embeddings'):for name, param in self.module.named_parameters():if param.requires_grad and emb_name in name and "video_embeddings" not in name:self.backup[name] = param.data.clone()norm = torch.norm(param.grad)if norm != 0 and not torch.isnan(norm):r_at = epsilon * param.grad / normparam.data.add_(r_at)def restore(self,emb_name='word_embeddings'):for name, param in self.module.named_parameters():if param.requires_grad and emb_name in name and "video_embeddings" not in name:assert name in self.backupparam.data = self.backup[name]self.backup = {}
二、权值平均
1.指数移动平均(Exponential Moving Average,EMA)
假设我们有n个数据:[θ1,θ2,θ3,...θn][θ_1,θ_2,θ_3,...θ_n][θ1,θ2,θ3,...θn]
普通的平均数为:
EMA为: 其中, vtv_tvt表示前ttt条的平均值 (v0=0v_0=0v0=0),βββ是加权权重值 (一般设为0.9-0.999)。
其中, vtv_tvt表示前ttt条的平均值 (v0=0v_0=0v0=0),βββ是加权权重值 (一般设为0.9-0.999)。
在深度学习的优化过程中,θtθ_tθt是ttt时刻的模型权重weights,vtv_tvt是t时刻的影子权重(shadow weights)。**在梯度下降的过程中,会一直维护着这个影子权重,但是这个影子权重并不会参与训练。**基本的假设是,模型权重在最后的n步内,会在实际的最优点处抖动,所以我们取最后n步的平均,能使得模型更加的鲁棒。
为什么EMA会有效?
对于EMA,有如下计算:
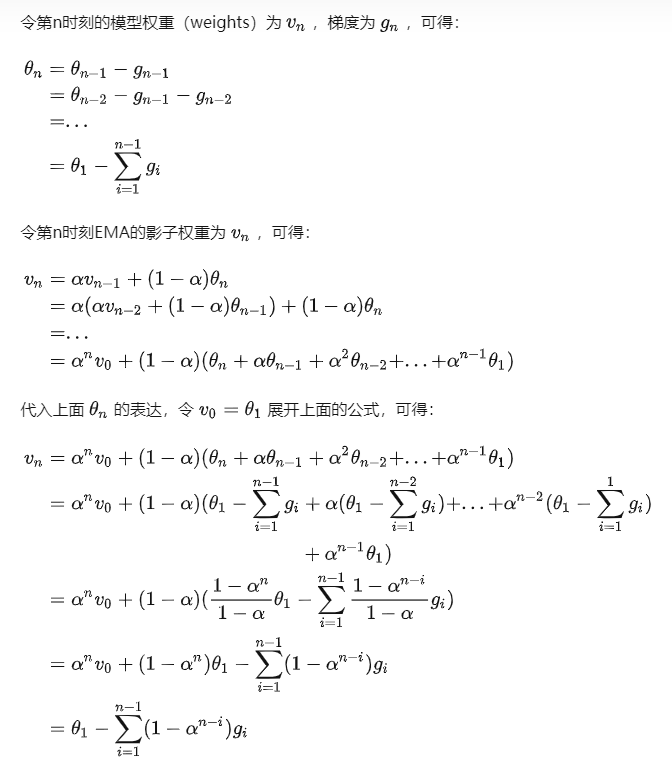
而对于普通的权值计算:
可见,普通的参数权重相当于一直累积更新整个训练过程的梯度,使用EMA的参数权重相当于使用训练过程梯度的加权平均(即对第i步的梯度下降增加了权重系数1−αn−i1-α^{n-i}1−αn−i,因此刚开始的梯度权值很小)。由于刚开始训练不稳定,得到的梯度给更小的权值更为合理,所以EMA会有效。
代码实现
class EMA():def __init__(self, model, decay):self.model = modelself.decay = decayself.shadow = {}self.backup = {}def register(self):for name, param in self.model.named_parameters():if param.requires_grad:self.shadow[name] = param.data.clone()def update(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.shadownew_average = (1.0 - self.decay) * param.data + self.decay * self.shadow[name]self.shadow[name] = new_average.clone()def apply_shadow(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.shadowself.backup[name] = param.dataparam.data = self.shadow[name]def restore(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.backupparam.data = self.backup[name]self.backup = {}# 初始化
ema = EMA(model, 0.999)
ema.register()# 训练过程中,更新完参数后,同步update shadow weights
def train():optimizer.step()ema.update()# eval前,apply shadow weights;eval之后,恢复原来模型的参数
def evaluate():ema.apply_shadow()# evaluateema.restore()
2. 随机权值平均(Stochastic Weight Averaging,SWA)
深度学习模型会收敛到不同的局部最小值,而区别这些局部最小值好坏的一个标准就是所谓的泛化能力。我们训练的模型经常存在一个现象,我们训练模型会存储很多的 checkpoints。不同的 checkpoints 的表现是有差异的,它们在大部分的 case 上表现几乎一致,但是在个别 case 上有差异,比如 checkpoint1 在 A case 上效果好,但是在 B case 上效果一般,相反 checkpoint2 在 B case 上效果较好,而在 A case 上效果一般。这是因为这些 checkpoints 实际上是收敛于不同的局部最小值导致的,因为深度学习模型永远也不会收敛到全局最小值的,但是那些较为平坦的 局部最小值 趋向于有更好的泛化能力,SWA就是一种得到较为平坦的 局部最小值的方法。
SWA是利用随机梯度下降法就能够提升深度学习模型的泛化能力的方法,而且不需要多余的代价,而且在Pytorch里面可以作为一种即插即用的方法来代替任何的优化器,SWA有广泛的应用和如下特点:
1.实验证明SWA能够显著的提高视觉任务的泛化能力,以 CIFAR 和 ImageNet 数据集为基准,提高了 VGG、ResNets、WideResNets 和 DenseNets 的泛化能力。
2.SWA 在半监督学习和域适应的关键基准数据集上达到了SOTA 效果。
3.在深度强化学习中 SWA 能够提高训练的稳定性,也提高了策略梯度法的最终平均奖励。
4.SWA在深度学习的扩展应用包括有效的贝叶斯模型的平均,也是高质量不确定性估计和校准
5.SWA用于低精度的训练(SWALP),甚至在所有的数值都量化到 8 位的情况下也能够比肩全精度的 SGD 的性能,包括梯度累加器。
简言之,SWA 就是对通过可调整的学习率的SGD算法得到的多个权重进行平均的方法。SWA最终的结果就是在一个广阔的平坦的 loss 区域的中心,而SGD趋向于收敛到低loss区域的边界,这使得结果容易受到训练和测试误差平面之间转换的影响,即在低loss区域的边界可能在测试集合误差平面较大的位置,也就是模型不够鲁棒。
SWA实现
有两个让SWA能够work的重要因素:
1.第一个是**可调整的学习率能让 SGD 继续探索高性能网络权重的集合而不是简单的只收敛到一个解上。**这块的理论实际上是不同的局部最小值是包含不同的有用信息的。例如:我们可以先用标准的衰减学习率策略在前75%的训练时间里进行学习,然后再把学习率设定到一个合理的较大的常数学习率上,在剩余的25%的训练时间里学习,这样就得到了很多的ckpt。
2.第二个是对通过SGD得到的不同 ckpt 的权重值进行平均。例如我们维持一个滑动平均的权重,在剩余的25%的训练时间里每个epoch都进行累计平均。
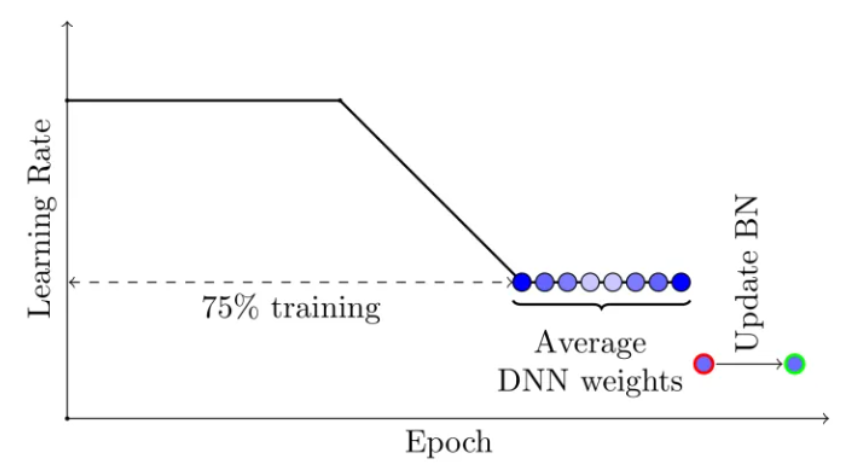
上图就是用标准的衰减学习率策略在前75%的训练时间里进行学习,然后再把学习率设定到一个合理的较大的常数学习率上,在剩余的25%的训练时间里学习。SWA的平均在最后的25%的训练时间里面产生。
使用swa模板
from torch.optim.lr_scheduler import CosineAnnealingLR
from torch import optim
import torchcontribbase_opt = optim.Adam(net.parameters(), lr=0.015, betas=(0.9, 0.999), eps=1e-08, weight_decay=0)
optimizer = torchcontrib.optim.SWA(base_opt) # for SWA
scheduler = CosineAnnealingLR(base_opt, T_max=20)...scheduler.step()# 定义什么时候开始取平均
if epoch % 100 == 0:optimizer.swap_swa_sgd()
三、训练加速
1.混合精度(amp)
为什么要使用AMP?
AMP其实就是Float32与Float16的混合,那为什么不单独使用Float32或Float16,而是两种类型混合呢?原因是:在某些情况下Float32有优势,而在另外一些情况下Float16有优势。
FP16优势有三个:
1 .减少显存占用;
2.加快训练和推断的计算,能带来多倍速的体验;
3,张量核心的普及(NVIDIA TensorCore) ,低精度计算是未来深度学习的一个重要趋势。
而FP16也带来了些问题:
1.溢出错误:由于 FP16 的动态范围比 FP32 的动态范围要狭窄很多,因此在计算过程中很容易出现上溢出(Overflow,g>65504)和下溢出(Underflow,)的错误,溢出之后就会出现“Nan”的问题。在深度学习中,由于激活函数的的梯度往往要比权重梯度小,更易出现下溢出的情况。
2.舍入误差:舍入误差指的是当梯度过小,小于当前区间内的最小间隔时,该次梯度更新可能会失败。
解决FP16问题的办法:混合精度训练+动态损失放大
1.混合精度训练(Mixed Precision): 混合精度训练的精髓在于“在内存中用 FP16 做储存和乘法从而加速计算,用 FP32做累加避免舍入误差”。混合精度训练的策略有效地缓解了舍入误差的问题。
2.损失放大(Loss Scaling): 即使用了混合精度训练,还是会存在无法收敛的情况,原因是激活梯度的值太小,造成了下溢出(Underflow)。损失放大的思路是:反向传播前,将损失变化(dLoss)手动增大,因此反向传播时得到的中间变量(激活函数梯度)则不会溢出;反向传播后,将权重梯度缩小倍,恢复正常值。
动态损失放大(Dynamic Loss Scaling)
AMP 默认使用动态损失放大,为了充分利用 FP16 的范围,缓解舍入误差,尽量使用最高的放大倍数,如果产生了上溢出(Overflow),则跳过参数更新,缩小放大倍数使其不溢出,在一定步数后(比如 2000 步)会再尝试使用大的 scale 来充分利用 FP16 的范围
使用方法
在前向传播中使用@autocast装饰器即可调用amp混合精度,torch.cuda.amp
# 导入python包
from torch.cuda.amp import autocast, GradScaler# 采用以下两种方式对forward使用amp
# 方式一:设置autocast区域
class Mymodel(nn.Module):...def forward(self, input):with autocast():...
# 方式二:使用autocast装饰器
class Mymodel(nn.Module):...@autocast()def forward(self, input):...model=Mymodel().cuda()
optimizer=optim.SGD(model.parameters(),...)
# 在训练最开始之前实例化一个GradScaler对象
scaler = GradScaler()# Runs the forward pass with autocasting.
for epoch in range(epochs):for i, (data, label) in enumerate(loader):with autocast(enabled=args.amp):model.train()loss = model(batch)loss = loss.mean()# 1、Scales loss. 先将梯度放大 防止梯度消失scaler.scale(loss).backward()# 2、scaler.step() 再把梯度的值unscale回来.# 如果梯度的值不是 infs 或者 NaNs, 那么调用optimizer.step()来更新权重,# 否则,忽略step调用,从而保证权重不更新(不被破坏)scaler.step(optimizer)# 3.Updates the scale for next iteration.scaler.update()scheduler.step()optimizer.zero_grad()2. 数据并行(Data Parallel, DP和Distributed Data Parallel,DDP)
这里简单说下DP。DDP可参考Pytorch 并行训练(DP, DDP)的原理和应用
并行训练可以分为数据并行和模型并行。
1.模型并行:模型并行主要应用于模型相比显存来说更大,一块 device 无法加载的场景,通过把模型切割为几个部分,分别加载到不同的 device 上。比如早期的 AlexNet,当时限于显卡,模型就是分别加载在两块显卡上的。
2.数据并行:这个是日常会应用的比较多的情况。每一个 device 上会加载一份模型,然后把数据分发到每个 device 并行进行计算,加快训练速度。
代码实现
model = torch.nn.parallel.DataParallel(model.to(args.device))
四、显卡不够用怎么增大batch size
参考聊聊梯度累加
梯度累加法
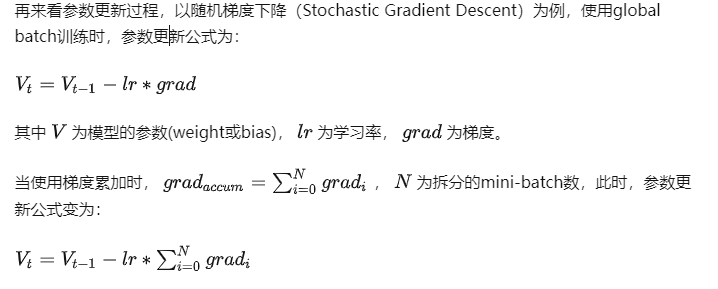
梯度累加,顾名思义,就是将多次计算得到的梯度值进行累加,然后一次性进行参数更新。假设我们有batch size = 256的global-batch,在单卡训练显存不足时,将其分为多个小的mini-batch(如分为大小为64的4个mini-batch),每个step送入1个mini-batch获得梯度,将多次获得的梯度进行累加后再更新参数,以次达到模拟单次使用global-batch训练的目的。
简单来说:时间换空间。加长训练时间,来换取大batch在小设备上可训练。
代码实现
# batch accumulation parameter
accum_iter = 4 # loop through enumaretad batches
for batch_idx, (inputs, labels) in enumerate(data_loader):# forward pass preds = model(inputs)loss = criterion(preds, labels)# scale the loss to the mean of the accumulated batch sizeloss = loss / accum_iter # backward passloss.backward()# weights updateif ((batch_idx + 1) % accum_iter == 0) or (batch_idx + 1 == len(data_loader)):optimizer.step()optimizer.zero_grad()
相关文章:
常用训练tricks,提升你模型的鲁棒性
目录一、对抗训练FGM(Fast Gradient Method): ICLR2017代码实现二、权值平均1.指数移动平均(Exponential Moving Average,EMA)为什么EMA会有效?代码实现2. 随机权值平均(Stochastic Weight Averaging,SWA&a…...
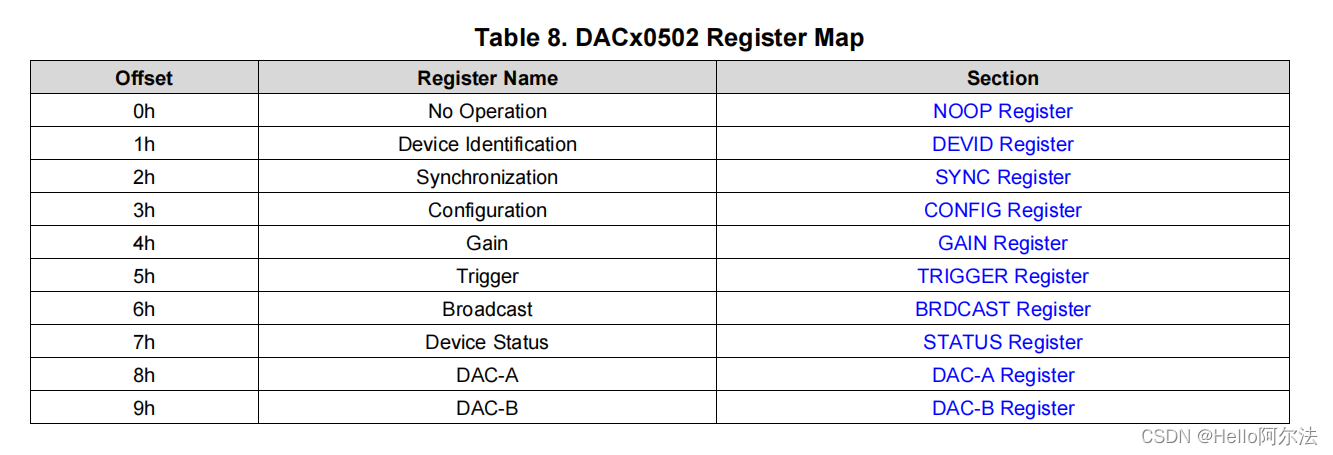
具有精密内部基准的 DACx0502 简介及驱动应用示例
DACx0502 说明 16 位 DAC80502、14 位 DAC70502 和 12 位DAC60502 (DACx0502) 数模转换器 (DAC) 均为具有电压输出的高精度、低功耗器件。 DACx0502 线性度小于 1LSB。凭借高精度和微型封装特性,DACx0502 非常适合以下 应用: 增益和失调电压校准、电流…...
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp()
C语言函数:字符串函数及模拟实现strncpy()、strncat()、strncmp() 在了解strncpy、strncat()、前,需要先了解strcpy()、strncat(): C语言函数:字符串函数及模拟实现strlen() 、strcpy()、 strcat()_srhqwe的博客-CSDN博客 strncp…...

学术论文插图要求简介
1. 类型 位图和矢量图是两种不同的图像类型,它们在存储和处理图像时使用不同的方法。以下是它们之间的详细区别: 图像构成方式:位图使用像素(或图像的最小单元)来构建图像,每个像素都有自己的颜色和亮度值。…...
)
【独家】华为OD机试 - 斗地主 2(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...

力扣-计算特殊奖金
大家好,我是空空star,本篇带大家了解一道简单的力扣sql练习题。 文章目录前言一、题目:1873. 计算特殊奖金二、解题1.正确示范①提交SQL运行结果2.正确示范②提交SQL运行结果3.正确示范③提交SQL运行结果4.正确示范④提交SQL运行结果5.其他总…...

华为校招机试真题目录
专栏介绍 本专栏将逐步收集历年华为校招算法真题 专栏权益 每篇博客都包含: 算法考点解析(文字+画图)算法源码(支持 Java / JS / Python)每晚9:00 ~ 11:00 在线答疑 真题目录 时间题目考点 or 实现2022.11.27...
EdgeYOLO学习笔记
EdgeYOLO学习笔记 EdgeYOLO: An Edge-Real-Time Object Detector Abstract 本文基于最先进的YOLO框架,提出了一种高效、低复杂度、无锚的目标检测器,该检测器可以在边缘计算平台上实时实现。为了有效抑制训练过程中的过拟合,我们开发了一种…...

【分布式】什么是分布式锁?正文揭晓
分布式锁的概念 分布式锁其实可以理解为:控制分布式系统有序的去对共享资源进行操作,通过互斥来保持一致性。 举个例子:假设共享的资源就是一个房子,里面有各种书,分布式系统就是要进屋看书的人, 分布式锁…...

超详细JDK1.8所有版本下载地址
JDK1.8即为JDK8,JDK8是目前是最成熟最稳定的版本,本文将详细介绍JDK1.8历史版本的下载方式。 在此附上JDK1.8安装与配置教程 超详细JDK1.8安装与配置 一、JDK官网 首先打开oracle官网,官网首页地址为 JDK官网首页地址 点击Products 点击…...
论文解析[11] CAT: Cross Attention in Vision Transformer
发表时间:2021 论文地址:https://arxiv.org/abs/2106.05786v1 文章目录摘要3 方法3.1 总体结构3.1.1 Inner-Patch Self-Attention Block3.1.2 Cross-Patch Self-Attention Block3.1.3 Cross Attention based Transformer结论摘要 使用图像patch来替换tr…...

嵌入式和Python(一):python环境搭建的详细步骤
目录 ● 安装python ① 更新软件列表 ② 安装编译python需要用到的环境 ③ 下载python源码 ④ 解压源码包 ⑤ 配置 ⑥ 编译 ⑦ 安装 ● 建立软连接 说明 ① 删除原来的软连接 ② 在/usr/bin/目录创建软连接python,定向/usr/local/bin/python3.9 ③ 检查…...
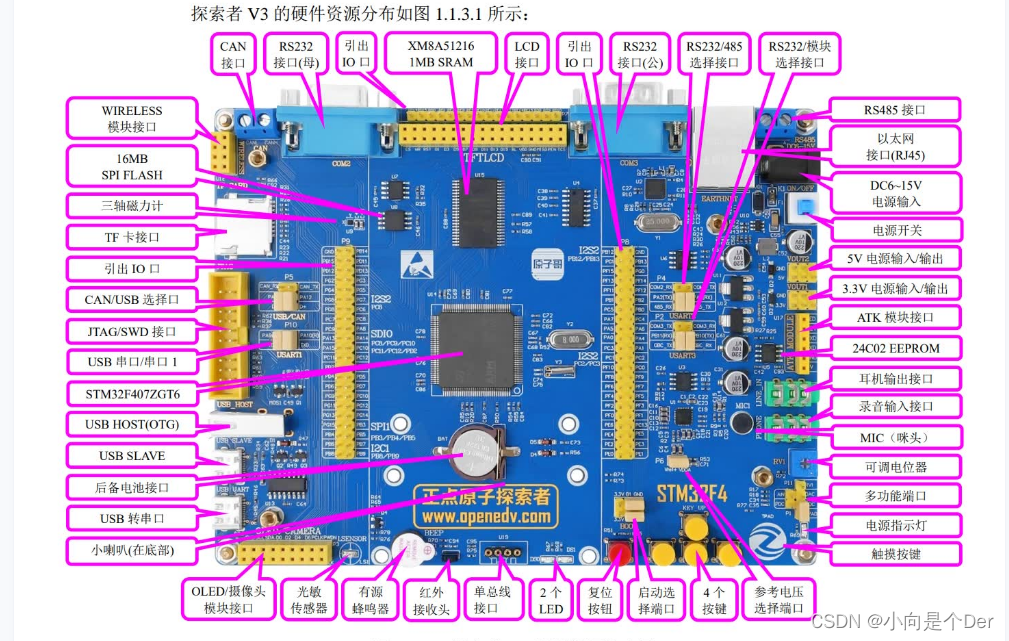
嵌入式学习笔记——STM32硬件基础知识
STM32开发硬件知识前言单片机参数主频位数STM32最小系统电源电路晶振电路复位电路BOOT选择电路调试接口电路其他电路本文重点本文参考博客链接前言 上一篇中我们重点是讲了一下怎么搭建开发环境以及怎么下载烧录的过程,这都是解决的电脑端的开发环境问题࿰…...
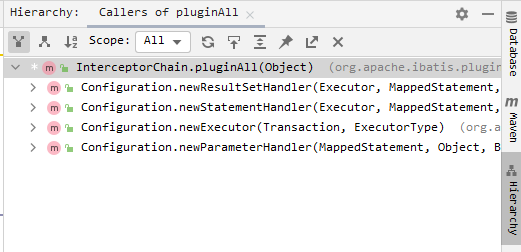
Mybatis插件开发及执行原理
mybatis源码下载 https://github.com/mybatis/mybatis-3,本文分析源码版本3.4.5 mybatis启动大致流程 在看这篇文章前,建议查看我另一篇文章,以了解框架启动的流程和框架中一些重要对象:https://blog.csdn.net/Aqu415/article/…...

vue父子组件通信,兄弟组件通信
目录 一、父子组件通信 1、子组件通过 props 获取父组件变量和父组件调用子组件中的方法(这两个都是父传子的思想) a:子组件通过 props 获取父组件变量 b:父组件调用子组件中的方法 2、父组件通过ref获取子组件变量和子组件调用父组件的方法(这两个都是子传父的…...
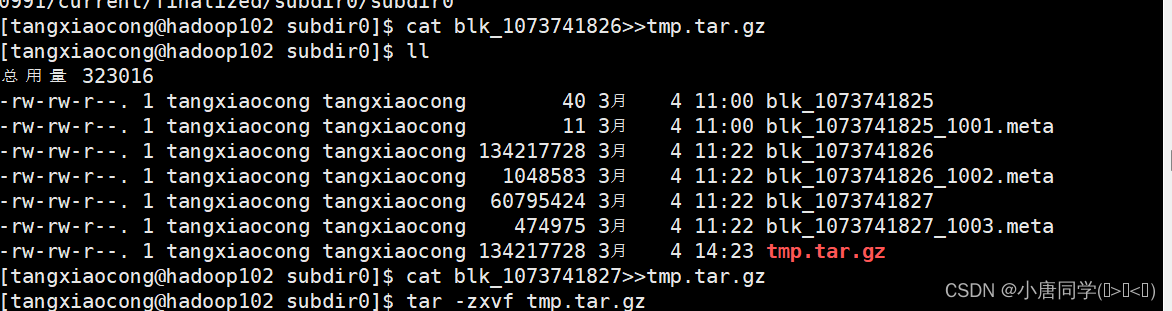
大数据技术之Hadoop集群配置
作者简介:大家好我是小唐同学(๑><๑),好久不见,为梦想而努力的小唐又回来了,让我们一起加油!!! 个人主页:小唐同学(๑><๑)的博客主页 目前…...
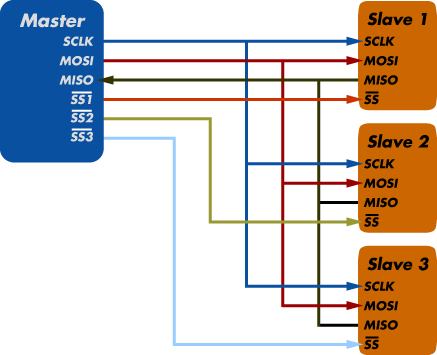
MicroBlaze系列教程(7):AXI_SPI的使用(M25P16)
文章目录 AXI_SPI简介MicroBlaze硬件配置常用函数使用示例波形实测参考资料工程下载本文是Xilinx MicroBlaze系列教程的第7篇文章。 AXI_SPI简介 Xilinx AXI-SPI IP共有两个:一个是标准的AXI_SPI,即4线制SPI,CS、SCLK、MOSI和MISO,另一个是AXI_Quad SPI,支持配置成标准SP…...

使用Python通过拉马努金公式快速求π
使用Python通过拉马努金公式快速求π 一、前言 π是一个数学常数,定义为:圆的周长与直径的比值。 π是一个无理数,也是一个超越数,它的小数部分无限不循环。 π可以用来精确计算圆周长、圆面积、球体积等几何形状的关键值。 有关…...

第六章 使用系统类提供国家语言支持 - 创建自定义语言环境
文章目录第六章 使用系统类提供国家语言支持 - 创建自定义语言环境创建自定义语言环境第六章 使用系统类提供国家语言支持 - 创建自定义语言环境 创建自定义语言环境 此示例将提供一个模板,用于使用自定义表创建自定义语言环境。自定义表将在 EBCDIC(美…...

「题解」解决二进制数中1的个数
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练 🔥座右铭:“不要等到什么都没有了,才下定决心去做” 🚀🚀🚀大家觉不错…...
开源抠图工具落地实操:Streamlit双列界面零门槛上手)
RMBG-2.0(BiRefNet)开源抠图工具落地实操:Streamlit双列界面零门槛上手
RMBG-2.0(BiRefNet)开源抠图工具落地实操:Streamlit双列界面零门槛上手 想给产品换个背景,却不会用复杂的PS?想快速处理一批图片素材,又担心在线工具泄露隐私?今天,我们就来聊聊一个…...

无需前端开发!Clawdbot配置Qwen3-32B,快速拥有Web聊天界面
无需前端开发!Clawdbot配置Qwen3-32B,快速拥有Web聊天界面 1. 为什么选择Clawdbot整合Qwen3-32B? 你是否遇到过这样的困境:团队内部部署了强大的Qwen3-32B大模型,却因为缺乏友好的交互界面而难以推广使用?…...

OpenClaw开源贡献:为Qwen3-4B-Thinking-2507-GPT-5-Codex-Distill-GGUF开发社区技能
OpenClaw开源贡献:为Qwen3-4B-Thinking-2507-GPT-5-Codex-Distill-GGUF开发社区技能 1. 为什么我要为OpenClaw开发技能 去年冬天,我在整理个人项目文档时,突然意识到一个痛点:每次都要手动将Markdown笔记转换成不同平台要求的格式…...

Hudi 生产问题排障-乱序Upsert入湖数据丢失
一、背景与问题在大数据流式处理领域,乱序一直是一个无法越过的问题,如何正确处理乱序数据也是流式组件不断努力优化的方向,比如FLink提供的watermark机制(forBoundedOutOfOrderness/allowedLateness/sideOutputLateDataÿ…...

SaaS Boilerplate认证系统详解:用户注册、OAuth登录和双重验证完整实现
SaaS Boilerplate认证系统详解:用户注册、OAuth登录和双重验证完整实现 【免费下载链接】saas-boilerplate SaaS Boilerplate - Open Source and free SaaS stack that lets you build SaaS products faster in React, Django and AWS. Focus on essential business…...

告别纯手工!用X-AnyLabeling的SAM2模型,5分钟搞定复杂目标分割标注
5分钟解锁X-AnyLabeling的SAM2黑科技:复杂目标分割标注效率提升指南 当面对医学影像中不规则肿瘤轮廓、遥感图像中的破碎地块边界,或是工业质检场景下的缺陷区域时,传统矩形框标注就像用粉笔画框测量云朵形状——既笨拙又低效。X-AnyLabelin…...

WTF, forms? CSS原理大揭秘:如何用纯CSS打造自定义表单控件
WTF, forms? CSS原理大揭秘:如何用纯CSS打造自定义表单控件 【免费下载链接】wtf-forms Friendlier HTML form controls with a little CSS magic. 项目地址: https://gitcode.com/gh_mirrors/wt/wtf-forms WTF, forms? 是一个通过纯CSS魔法打造友好HTML表…...

告别打印乱码与错位:手把手教你配置SAP Smartforms的CNSAPWIN打印机格式
告别打印乱码与错位:手把手教你配置SAP Smartforms的CNSAPWIN打印机格式 在SAP系统的日常使用中,打印问题是最令人头疼却又无法回避的挑战之一。想象一下,当你精心设计的发票Smartforms报表终于完成,却在打印时发现内容被截断、错…...

直方图均衡化:从理论到实践——MATLAB代码实现与效果对比
1. 直方图均衡化基础概念 直方图均衡化是数字图像处理中最基础也最实用的技术之一。简单来说,它就像给照片做了一次"智能美颜",能够自动调整图像的对比度,让暗部更清晰、亮部更细腻。想象一下你拍摄了一张背光的人像照片࿰…...

SpringBoot 自动配置原理与实践
核心机制解析SpringBoot 的自动配置基于条件化装配思想,通过 Conditional 系列注解实现动态加载。spring-boot-autoconfigure 模块包含大量预定义配置类,例如 DataSourceAutoConfiguration 在检测到类路径存在 HikariCP 时自动初始化数据源。关键组件包括…...