【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
- 问题描述
- 解决方法
问题描述
无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。

观察Gazebo左侧World栏GUI选项,发现有一个track_visual项,这个是Gazebo中的跟随视角,跟踪目标是无人机iris,但是手动点击无法取消,设置Gazebo使用FOLLOW选项跟随其他目标也无法实现,Gazebo打开时默认是不会进行视角跟随的,所以我猜测原因是PX4在Gazebo仿真中写了一个脚本来使无人机一直处于画面中央。

通过观察发现这个camera的名称为gzclient_camera,于是在PX4源码中搜索这几个关键词,比如client、camera、gazebo,结果还真找到了相关代码。
在Tools/sitl_run.sh文件中有如下的代码,控制Gazebo中的视角跟随无人机。
# Disable follow mode
if [[ "$PX4_NO_FOLLOW_MODE" != "1" ]]; thenfollow_mode="--gui-client-plugin libgazebo_user_camera_plugin.so"
elsefollow_mode=""
fi
解决方法
在运行仿真命令时加上前缀PX4_NO_FOLLOW_MODE=1来屏蔽视角跟随部分代码。
PX4_NO_FOLLOW_MODE=1 make px4_sitl_rtps gazebo
之后再次运行即可在固定视角下观察无人机的运动。

相关文章:
【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述 无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧Wo…...
五种多目标优化算法(NSGA2、MOPSO、MSSA、MOGWO、NSWOA)求解9个测试函数,包含6种评价指标(提供MATLAB代码)
一、5种多目标优化算法简介 1.1NSGA2 1.2MOPSO 1.3MSSA 1.4MOGWO 1.5NSWOA 二、5种多目标优化算法性能对比 为了测试5种算法的性能将其求解9个多目标测试函数(zdt1、zdt2 、zdt3、 zdt4、 zdt6 、Schaffer、 Kursawe 、Viennet2、 Viennet3)࿰…...

Sora--首个大型视频生成模型
Sora--首个大型视频生成模型 胡锡进于2024年2月20日认为:台当局怂了 新的改变世界模拟器视觉数据转换视频压缩时空补丁(Spacetime Laten Patches)视频生成扩展变压器算法和模型架构结语 胡锡进于2024年2月20日认为:台当局怂了 **T…...

关于 Reflect 的笔记
背景:Reflect 为了操作对象而提供的新Api 和 Proxy对象一样 特点 将object 对象的一些明显属于语言内部的方法,放到Reflect 上处理;修改某些object返回的异常结果,让其变得更合理;让object操作都变成函数行为…...
week04day02(爬虫02)
<span>: 通常用于对文本的一部分进行样式设置或脚本操作。<a>: 定义超链接,用于创建链接到其他页面或资源的文本。<img>: 用于插入图像。<br>: 用于插入换行。 姓名:<input type"text" value"lisi">…...
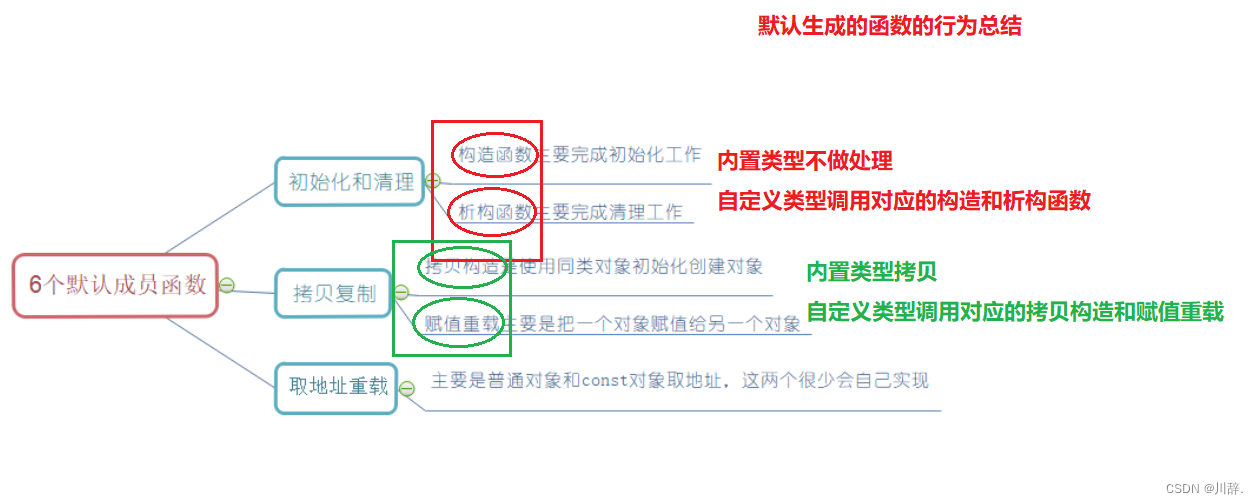
【C++初阶】类和对象(中)
目录 一.类的6个默认成员函数 1.知识引入 编辑 2.构造函数 (1)概念 (2)语法特性 (3)特征 ①问题引入1 ②问题引入2 (缺少默认构造函数) 3.析构函数 (1)概念 (2)特性 4.拷贝构造函数 (1)概念 (2)特征 ①拷贝构造函数是构造函数的一…...

Python爬虫知识图谱
下面是一份详细的Python爬虫知识图谱,涵盖了从基础入门到进阶实战的各个环节,涉及网络请求、页面解析、数据提取、存储优化、反爬策略应对以及法律伦理等多个方面,并配以关键点解析和代码案例,以供读者深入学习和实践。 一、Pyth…...

安宝特AR汽车行业解决方案系列1-远程培训
在汽车行业中,AR技术的应用正悄然改变着整个产业链的运作方式,应用涵盖培训、汽修、汽车售后、PDI交付、质检以及汽车装配等,AR技术为多个环节都带来了前所未有的便利与效率提升。 安宝特AR将以系列推文的形式为读者逐一介绍在汽车行业中安宝…...
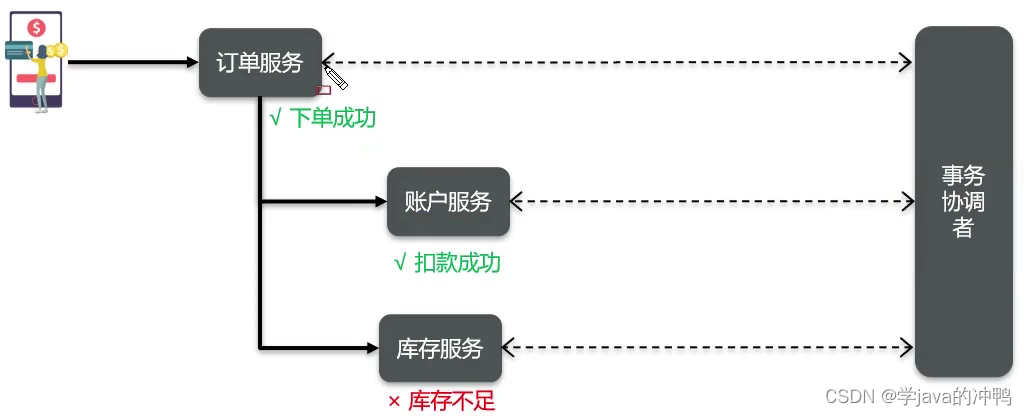
微服务篇之分布式系统理论
一、CAP定理 1.什么是CAP 1998年,加州大学的计算机科学家 Eric Brewer 提出,分布式系统有三个指标: 1. Consistency(一致性)。 2. Availability(可用性)。 3. Partition tolerance ࿰…...

MLflow【部署 01】MLflow官网Quick Start实操(一篇学会部署使用MLflow)
一篇学会部署使用MLflow 1.版本及环境2.官方步骤Step-1 Get MLflowStep-2 Start a Tracking ServerStep 3 - Train a model and prepare metadata for loggingStep 4 - Log the model and its metadata to MLflowStep 5 - Load the model as a Python Function (pyfunc) and us…...

NDK的log.h使用__android_log_print报错app:buildCMakeDebug[x86_64]
org.gradle.api.tasks.TaskExecutionException: Execution failed for task :app:buildCMakeDebug[x86_64] 重点是 Execution failed for task :app:buildCMakeDebug[x86_64]. 我的代码: #include <android/log.h> #define LOG_TAG "MyJNI" #d…...

【计算机网络:DHCP协议】
文章目录 前言一、DHCP是什么?二、DHCP的工作原理1.基本流程发现(DISCOVER)提供(OFFER)请求(REQUEST)确认(ACKNOWLEDGEMENT) 2.DHCP租约的概念3.DHCP续租过程 三、DHCP服…...

http前生今世
HTTP/0.9,仅支持GET方法,并且响应中没有HTTP头信息,只有文档内容。 HTTP/1.0增加了对POST方法、状态码、HTTP头信息等的支持,这一版本也是广泛应用的历史性版本。 HTTP/1.1引入了持久连接(Persistent Connections&…...
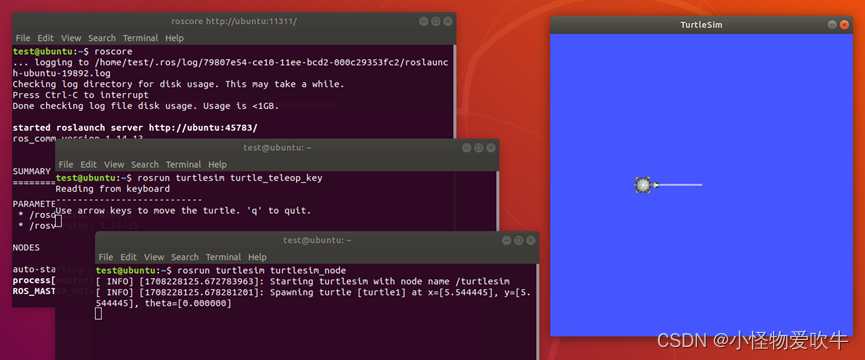
一键安装ROS适用于Ubuntu22/20/18
一键安装ROS适用于Ubuntu22/20/18 1、简介 ROS(Robot Operating System,机器人操作系统)是一个用于机器人软件开发的框架。它提供了一套工具和库,用于机器人应用程序的开发、测试和部署。ROS是由美国斯坦福大学机器人实验室&…...

OLED透明屏厂家:开启2024年新征程
随着科技的不断进步和创新,OLED透明屏作为一种前沿的显示技术,正逐渐走进人们的视野,成为多个领域的焦点。在2024年2月21日这个特殊的日子,我们这家领先的OLED透明屏厂家正式开工,预示着我们将迎来一个充满机遇和挑战的…...
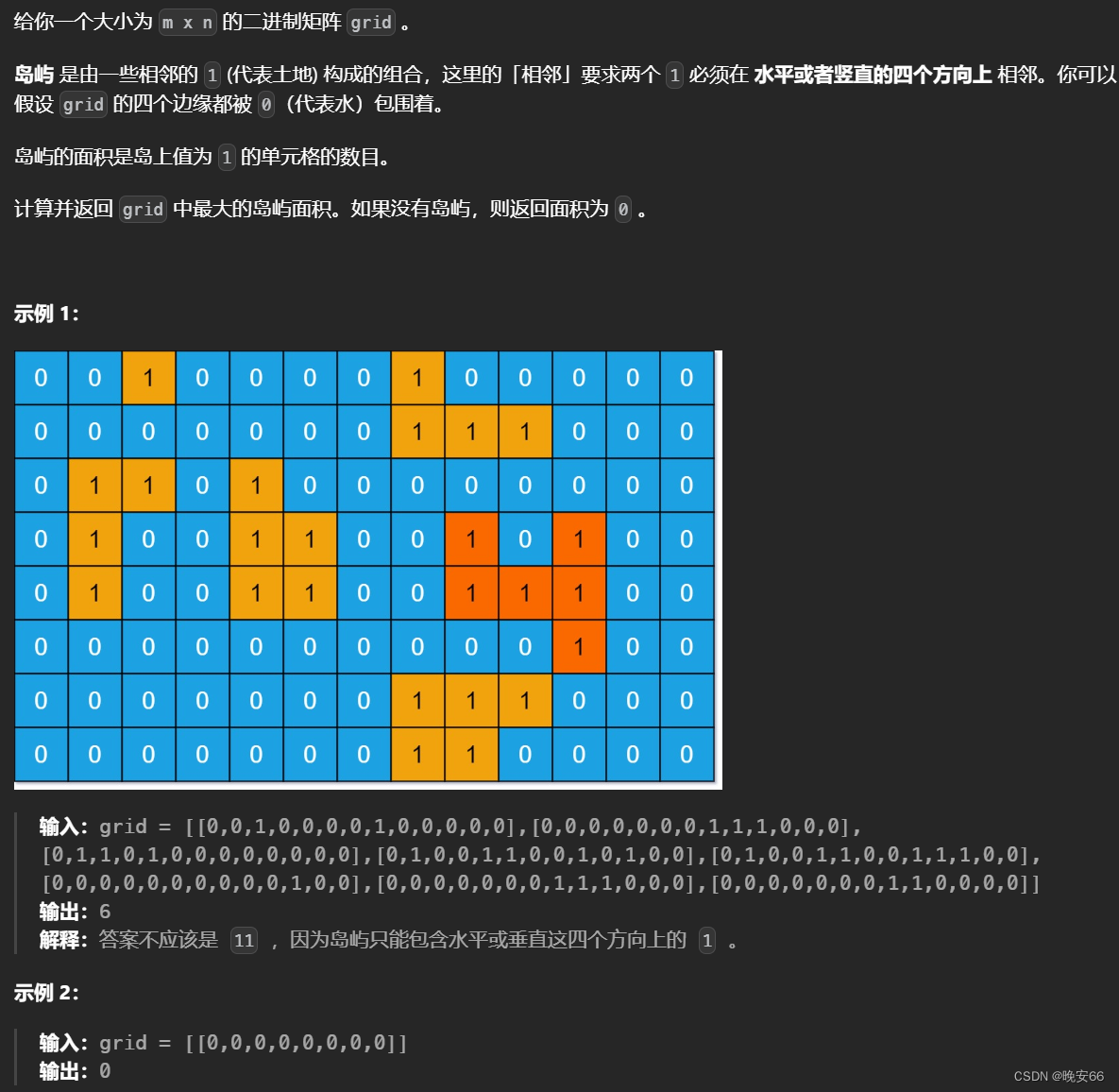
【算法与数据结构】200、695、LeetCode岛屿数量(深搜+广搜) 岛屿的最大面积
文章目录 一、200、岛屿数量1.1 深度优先搜索DFS1.2 广度优先搜索BFS 二、695、岛屿的最大面积2.1 深度优先搜索DFS2.2 广度优先搜索BFS 三、完整代码 所有的LeetCode题解索引,可以看这篇文章——【算法和数据结构】LeetCode题解。 一、200、岛屿数量 1.1 深度优先搜…...

第四十一回 还道村受三卷天书 宋公明遇九天玄女-python创建临时文件和文件夹
宋江想回家请老父亲上山,晁盖说过几天带领山寨人马一起去。宋江还是坚持一个人去。 宋江到了宋家村,被两个都头和捕快们追捕,慌不择路,躲进了一所古庙。一会儿,听见有人说:小童奉娘娘法旨,请星主…...
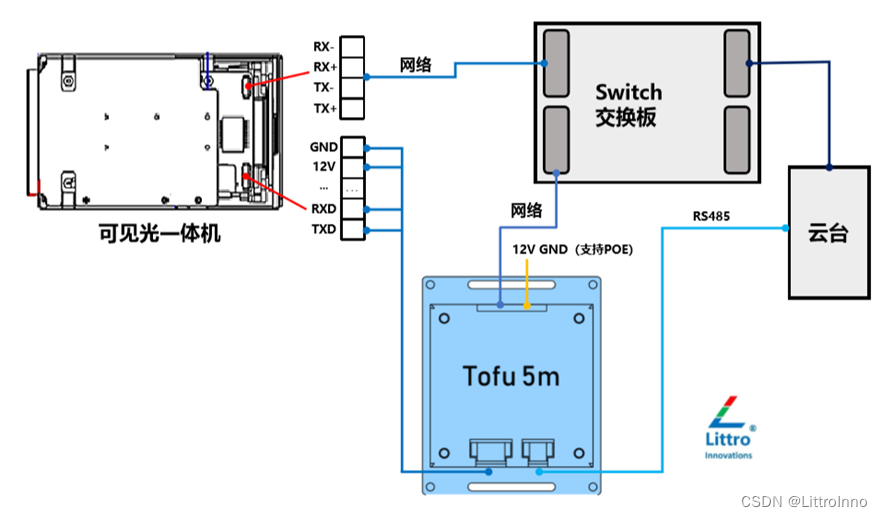
Tofu5m 高速实时推理Yolov8
Tofu5m 是高性价比目标识别跟踪模块,支持可见光视频或红外网络视频的输入,支持视频下的多类型物体检测、识别、跟踪等功能。 Yolov8推理速度达到40帧每秒。 实测视频链接:Tofu5m识别跟踪模块_哔哩哔哩_bilibili 产品支持视频编码、设备管理…...
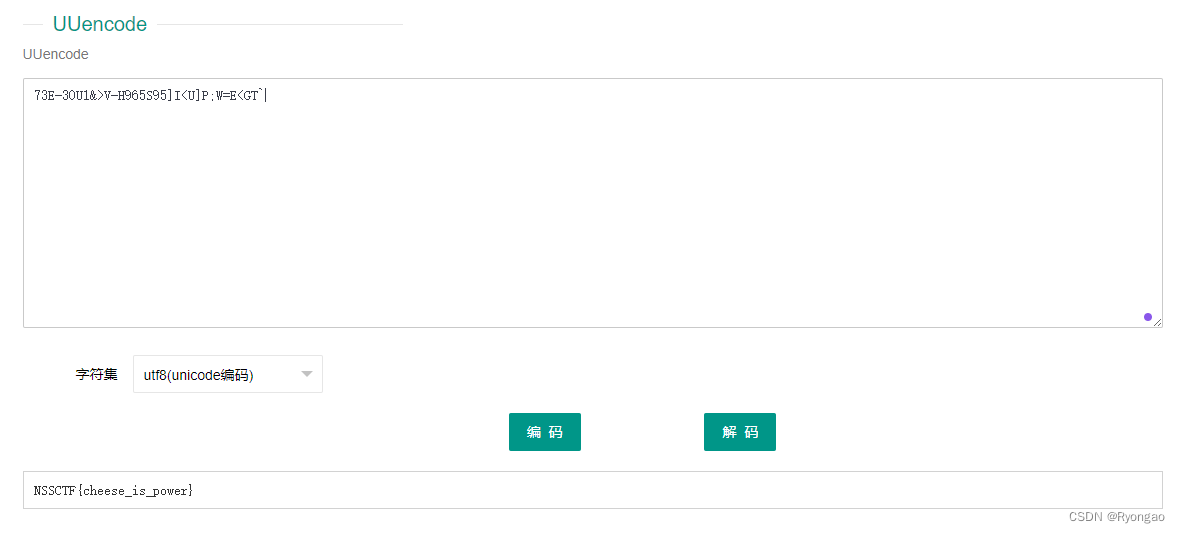
[SWPUCTF 2021 新生赛]crypto8
第一眼看见是乱码不确定是什么的编码 看了下感觉是UUencode编码 UUencode编码是一种古老的编码方式,通常用于将二进制数据转换成可打印字符的形式。UUencode编码采用一种基于64个字符的编码表,将每3个字节的数据编码为4个可打印字符,以实现…...
)
学习使用js调用动态函数名(动态变量函数名)
学习使用js调用动态函数名-动态变量函数名 背景代码 背景 函数名写在 html 上,在 js 中定义这个变量,js 报错该函数不存在,在此给出解决方法 代码 //html代码如下 <a data-function"qipa" class"clickMe">250&l…...
)
理光MP C2500扫描到共享文件夹保姆级教程(附Windows 10/11权限避坑指南)
理光MP C2500扫描到共享文件夹全流程解决方案与Windows权限深度优化 办公室里那台老当益壮的理光MP C2500复合机,至今仍是许多中小企业的生产力主力。但当IT管理员尝试配置"扫描到共享文件夹"功能时,往往会遭遇浏览网络空白、权限拒绝等"…...

不只是连线:深入理解模拟版图中电阻的‘Segment’与‘M’参数对实际阻值的影响
不只是连线:深入理解模拟版图中电阻的‘Segment’与‘M’参数对实际阻值的影响 在模拟集成电路设计中,电阻作为最基本的无源元件之一,其版图实现往往被初学者视为简单的金属连线问题。然而,当设计从原理图转向物理实现时ÿ…...

百考通AI让开题报告成为研究助力,而非负担
开题报告是毕业论文或学位研究的“第一块基石”,它不仅决定你的选题能否通过,更直接影响后续研究的深度、逻辑与可行性。然而,许多学生在撰写时常常陷入困境:问题意识模糊、文献综述堆砌无主线、研究方法描述空泛、结构松散不规范…...

别再折腾了!Windows 11下TeX Live 2024 + VS Code配置LaTeX环境保姆级教程
别再折腾了!Windows 11下TeX Live 2024 VS Code配置LaTeX环境保姆级教程 对于科研人员和学术写作者来说,LaTeX始终是专业排版的不二之选。但传统LaTeX编辑器如TeXstudio虽然功能全面,却难以融入现代开发者的工作流。本文将带你用VS Code搭建…...

社会风气何以如此?渡劫未彻底,继续渡劫。从为人民服务到为节点服务
社会风气何以如此?渡劫未彻底,继续渡劫。从为人民服务到为节点服务。 Jianbing Zhu 1 1 ECT-OS-JiuHuaShan 文明实践室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20302480 Email: ect-os-jiuhuashanzohomail.cn 预印本提交:202…...
)
别再搞混了!设备上那个RJ45口是Console调试口,不是网口(附电路设计详解)
别再搞混了!设备上那个RJ45口是Console调试口,不是网口(附电路设计详解) 第一次接触企业级网络设备时,许多新手都会犯一个经典错误——把设备背面那个看似网口的RJ45接口当作普通网络接口使用。我曾亲眼见过一位实习生…...

别再死记硬背了!用Python写个语法分析器,帮你彻底搞懂英语非谓语动词
用Python构建英语非谓语动词分析器:从语法规则到代码逻辑 引言:当编程遇上英语语法 英语学习中最令人头疼的部分莫过于非谓语动词——那些不做谓语的动词形式,包括不定式、分词和动名词。传统学习方法要求死记硬背各种规则和例外,…...
4大技术支柱:构建Pixelle-Video的模块化AI视频生成系统
4大技术支柱:构建Pixelle-Video的模块化AI视频生成系统 【免费下载链接】Pixelle-Video 🚀 AI 全自动短视频引擎 | AI Fully Automated Short Video Engine 项目地址: https://gitcode.com/GitHub_Trending/pi/Pixelle-Video 传统视频制作流程需要…...

研究生必看:论文机制图、流程图快速画法
在学术研究中,高质量的科研配图往往是论文能否被接收的关键因素之一。然而,对于没有专业绘画背景的科研人员来说,传统绘图软件的学习成本高、操作复杂,往往让人望而却步。MedPeer科研绘图工具正是为解决这一痛点而设计——让科研人…...

Prompt核心原则与技巧
1. Prompt的本质Prompt是用户和模型之间的"接口"。设计好的Prompt就像把话说清楚——越清楚,模型越能给你想要的答案。类比:就像你请人帮忙做事:说"帮我处理一下" → 对方可能做错说"帮我把这封信装进信封ÿ…...