【四】3D Object Model之测量Features——get_object_model_3d_params()算子
😊😊😊欢迎来到本博客😊😊😊
🌟🌟🌟 Halcon算子太多,学习查找都没有系统的学习查找路径,本专栏主要分享Halcon各类算子含义及用法,有时间会更新具体案例。
😊😊😊 具体食用方式:可以点击本专栏【Halcon算子快速查找】–>搜索你要查询的算子名称;或者点击Halcon算子汇总博客,即可食用。
🎁🎁🎁支持:如果觉得博主的文章还不错或者您用得到的话,可以悄悄关注一下博主哈,如果三连收藏支持就更好啦!这就是给予我最大的支持!😙😙😙
文章目录
- 学习目标
- 学习内容
- 1、get_object_model_3d_params()
- Halcon例程
- 【3D Object Model之测量Features】 待更新算子
- 汇总
学习目标
- get_object_model_3d_params()
学习内容
算子简介
| 函数名 | 解释 |
|---|---|
| get_object_model_3d_params() | 返回三维对象模型的属性。 |
1、get_object_model_3d_params()
get_object_model_3d_params( : : ObjectModel3D, GenParamName : GenParamValue)
函数说明:三维对象模型由一组属性和元数据组成,get_object_model_3d_params允许访问给定3d对象模型的属性和元数据。请求的属性或元数据的名称在通用参数GenParamName中传递,相应的值在GenParamValue中返回。
如果请求的属性或元数据不可用,则会引发异常。get_object_model_3d_params支持同时访问多个三维对象模型和多个属性。
请注意:属性或元数据可以具有不同的长度。一些标准属性具有定义的长度,如后面介绍的属性描述。其他属性的长度取决于实际的三维对象模型,可以通过将参数GenParamName设置为“num_points”、“num_triangles”、“num_polygons”或“num_lines”来查询。因此,要获得标准属性“point_coord_x”的长度,请将GenParamName设置为“num_points”。
函数参数:
ObjectModel3D:输入 3D对象模型句柄;
GenParamName:输入为三维对象模型查询的常规属性的名称;默认: ‘num_points’;参考: 'blue', 'bounding_box1', 'center', 'diameter_axis_aligned_bounding_box', 'extended_attribute_names', 'extended_attribute_types', 'green', 'has_distance_computation_data', 'has_extended_attribute', 'has_lines', 'has_point_normals', 'has_points', 'has_polygons', 'has_primitive_data', 'has_primitive_rms', 'has_segmentation_data', 'has_shape_based_matching_3d_data', 'has_surface_based_matching_data', 'has_triangles', 'has_xyz_mapping', 'lines', 'mapping_col', 'mapping_row', 'mapping_size', 'neighbor_distance', 'num_extended_attribute', 'num_lines', 'num_neighbors', 'num_neighbors_fast', 'num_points', 'num_polygons', 'num_primitive_parameter_extension', 'num_triangles', 'original_point_indices', 'point_coord_x', 'point_coord_y', 'point_coord_z', 'point_normal_x', 'point_normal_y', 'point_normal_z', 'polygons', 'primitive_parameter', 'primitive_parameter_extension', 'primitive_parameter_pose', 'primitive_pose', 'primitive_rms', 'primitive_type', 'red', 'reference_point', 'score', 'triangles';
GenParamValue:输出通用参数值;
| 属性名 | 解释 |
|---|---|
'point_coord_x' | 一组3D点的x坐标(长度可以通过num_points查询)。该属性通常从运算符xyz_to_object_model_3d或read_object_model_3d获得。 |
'point_coord_y' | 一组3D点的y坐标(长度可以通过num_points查询)。该属性通常从运算符xyz_to_object_model_3d或read_object_model_3d获得。 |
'point_coord_z' | 一组3D点的z坐标(长度可以通过num_points查询)。该属性通常从运算符xyz_to_object_model_3d或read_object_model_3d获得。 |
'point_normal_x' | 一组3D点的法线x分量(长度可以通过num_points查询)。该属性通常从操作符smooth_object_model_3d中获得。 |
'point_normal_y' | 一组3D点的法线y分量(长度可以通过num_points查询)。该属性通常从操作符smooth_object_model_3d中获得。 |
'point_normal_z' | 一组3D点的法线z分量(长度可以通过num_points查询)。该属性通常从操作符smooth_object_model_3d中获得。 |
'score' | 一组3D点的分数(长度可以通过num_points查询)。该属性通常从操作符reconstruct_surface_stereo中获得。 |
'red' | 一组3D点的red通道(长度可以通过num_points查询)。该属性通常从操作符reconstruct_surface_stereo中获得。 |
'green' | 一组3D点的green通道(长度可以通过num_points查询)。该属性通常从操作符reconstruct_surface_stereo中获得。 |
'blue' | 一组3D点的blue通道(长度可以通过num_points查询)。该属性通常从操作符reconstruct_surface_stereo中获得。 |
'mapping_row' | 3D点集的二维映射的行组件。(长度可以通过num_points查询)。原始图像的高度可通过mapping_size查询)。该属性通常从运算符xyz_to_object_model_3d中获得。 |
'mapping_col' | 3D点集的二维映射的列组件。(长度可以通过num_points查询)。原始图像的高度可通过mapping_size查询)。该属性通常从运算符xyz_to_object_model_3d中获得。 |
'mapping_size' | 原始图像的大小。返回一个具有两个条目宽度和高度的元组。 |
'triangles' | 按以下顺序表示三角形的三维点的索引:前三个值(返回值0,1,2)表示第一个三角形。接下来的三个值(返回值3、4、5)表示第二个三角形等。所有索引都对应于3D点的坐标。可以访问3D点的坐标,例如,将通用参数GenParamName分别设置为值“point_coord_x”、“point_cord_y”和“point_corde_z”。此属性的长度相当于三角形数量的三倍,可以使用“num_triangles”查询三角形。该属性通常从操作符triangulate_object_model_3d或read_object_model_3d获得。 |
'polygons' | 按以下顺序表示多边形的三维点的索引:第一个返回值包含第一个多边形的点数n。以下值(返回值1,2,…,n)表示第一个多边形的点的索引。下一个值(返回值n+1)包含第二个多边形的点数m。以下m个返回值(返回值n+2,n+3,…,n+1+m)表示第二多边形等的点的索引。所有索引对应于3D点的坐标。可以访问3D点的坐标,例如,将通用参数GenParamName分别设置为值“point_coord_x”、“point_cord_y”和“point_corde_z”。可以使用“num_polygons”查询每个三维对象模型的多边形数。该属性通常从操作符read_object_model_3d中获得。 |
'lines' | 按以下顺序表示多段线的三维点的索引:第一个返回值包含第一条多段线点数n。以下值(返回值1,2,…,n)表示第一条多段线的点的索引。下一个值(返回值n+1)包含第二条多段线的点数m。以下m个值(返回值n+2,n+3,…,n+1+m)表示第二折线等的点的索引。所有索引对应于3D点的坐标。可以访问3D点的坐标,例如,将通用参数GenParamName分别设置为值“point_coord_x”、“point_cord_y”和“point_corde_z”。可以使用“num_lines”查询每个三维对象模型的行数。该属性通常从操作符intersect_plane_object_model_3d中获得。 |
'diameter_axis_aligned_bounding_box' | 一组3D点的直径,定义为最小封闭轴平行长方体的对角线长度(请参见参数’bounding_box1’)。此属性的长度为1。 |
'center' | 该组3D点的中心的3D坐标。这些坐标是最小封闭轴平行长方体的中心(请参见参数“bounding_box1”)。此属性的长度为3。如果三维对象模型中没有三维坐标,则以下规则有效:(1) 如果三维对象模型是圆柱体类型的基本体(请参见 gen_cylinder_object_model_3D),并且存在扩展,则返回扩展之间的中心点。如果没有扩展,则返回姿势的平移参数;(2) 如果三维对象模型是类型为平面的基元(请参考 gen_plane_object_model_3D),并且存在扩展,则根据扩展计算平面的重心。如果没有扩展,则返回姿势的平移参数;(3) 如果三维对象模型是球体或长方体类型的基本体(请参考 gen_sphere_object_model_3D或gen_box_object_model_3D),则返回对象模型的中心点。 |
'original_point_indices' | 不同三维对象模型中三维点的索引(长度可以通过num_points查询)。该属性通常从操作符triangulate_object_model_3d中获得。 |
'primitive_type' | 基元类型(例如,从操作符fit_primitives_object_model_3d获得)。球体的返回值为“sphere”。圆柱体的返回值为“cylinder”。平面的返回值为“plane”。box的返回值为“box”。此属性的长度为1。 |
'primitive_parameter' | 基元的参数(例如,从操作符fit_primitives_object_model_3d获得)。该属性的长度取决于“primitive_type”,对于每个三维对象模型,长度在4到10之间。(1) 如果三维对象模型是圆柱体类型的基元(请参见 gen_cylinder_object_model_3D),则返回值为中心[x_center,y_center,z_center]的(x-,y-,z-)坐标、圆柱体主轴[x_axis,y_axis,z_axis]的(x-,y-,z-)方向以及圆柱体的半径[radius]。顺序为[x_center,y_center,z_center,x_axis,y_axis,z_axis,radius]。(2) 如果三维对象模型是类型为球体的基元(请参见 gen_sphere_object_model_3D),则返回值为球体的中心[x_center,y_center,z_center]的(x-,y-,z-)坐标和半径[radius]。顺序为[x_center,y_center,z_center,radius]。(3) 如果3D对象模型是平面类型的基元(参见 gen_plane_object_model_3D),则返回hessian法线形式的4个参数,即单位法线(x-,y-,z-)向量[x,y,z]和平面与坐标系原点的正交距离(d)。顺序是[x,y,z,d]。距离(d)的符号决定了原点所在平面的一侧。(4) 如果三维对象模型是长方体类型的基元( gen_box_object_model_3D),则返回值为长方体的三维姿势(平移、旋转、旋转类型)和半边长(长度1、长度2、长度3)。length1是长方体沿姿势的x轴的长度。length2是长方体沿着姿势的y轴的长度。length3是长方体沿着姿势的z轴的长度。顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type,length1,length2,length3]。有关三维姿势和相应变换矩阵的详细信息,请参见操作符create_pose。 |
'primitive_parameter_pose' | 具有3D姿势格式的基元的参数(例如,从操作符fit_primitives_object_model_3D获得)。对于所有类型的基本体,返回值都是3D姿势(平移、旋转、旋转类型)。有关三维姿势和相应变换矩阵的详细信息,请参见操作符create_pose。该属性的长度取决于“primitive_type”,对于每个三维对象模型,该长度在7到10之间。(1) 如果三维对象模型是圆柱体类型的基元(请参见 gen_cylinder_object_model_3D),则还会返回圆柱体的半径[radius]。顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type,radius]。(2) 如果三维对象模型是类型为球体的基元(请参见 gen_sphere_object_model_3D),则还会返回球体的半径[radius]。顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type,radius]。(3) 如果三维对象模型是类型为平面的基元(请参见 gen_plane_object_model_3D),则顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type]。(4) 如果三维对象模型是长方体类型的基元(请参见 gen_box_object_model_3D),则还会返回长方体的半边长(length1、length2、length3)。length1是长方体沿姿势的x轴的长度。length2是长方体沿着姿势的y轴的长度。length3是长方体沿着姿势的z轴的长度。顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type,length1,length2,length3]。 |
'primitive_pose' | 具有3D姿势格式的基元的参数(例如,从操作符fit_primitives_object_model_3D获得)。对于所有类型的基本体,返回值都是3D姿势(平移、旋转、旋转类型)。有关三维姿势和相应变换矩阵的详细信息,请参见操作符create_pose。对于每个三维对象模型,该属性的长度为7。顺序为[trans_x,trans_y,trans_z,rot_x,rot_y,rot_z,rot_type]。 |
'primitive_parameter_extension' | 圆柱体和平面类型的基元的范围(例如,从操作符fit_primitives_object_model_3d获得)。此属性的长度取决于“primitive_type”,可以使用“num_primitive_parameter_extension”进行查询。(1) 如果三维对象模型是圆柱体类型的基本体(请参见 gen_cylinder_object_model_3D),则返回值为圆柱体的范围(MinExtent、MaxExtent)。它们按[MinExtent,MaxExtent]的顺序返回。MinExtent表示圆柱体在旋转轴负方向上的长度。MaxExtent表示圆柱体在旋转轴正方向上的长度。(2) 如果三维对象模型是平面类型的基元(使用 fit_primitives_object_model_3D创建),则返回值是关于拟合平面的共面点的元组。顺序为[点1的x坐标,点2的x坐标、点3的x坐标…、点1的y坐标、点2的y坐标,点3的y坐标…]。坐标值描述了凸包的支撑点。这是基于拟合平面上有助于拟合的那些点的投影来计算的。如果平面是使用gen_plane_object_model_3d创建的,则会返回用于创建平面的所有点(XExtent、YExtent)。 |
'primitive_rms' | 基元的二次残差(例如,从算子fit_primitives_object_model_3d获得)。此属性的长度为1。 |
'reference_point' | 用于基于形状的3D匹配的所准备的3D形状模型的参考点的3D坐标。参考点是最小封闭轴平行长方体的中心(参见参数“bounding_box1”)。此属性的长度为3。 |
'bounding_box1' | 最小封闭轴平行长方体(min_x,min_y,min_z,max_x,max_y,max_z)。此属性的长度为6。 |
'num_points' | 点数。此属性的长度为1。 |
'num_triangles' | 三角形的数量。此属性的长度为1。 |
'num_polygons' | 多边形的数量。此属性的长度为1。 |
'num_lines' | 线的数量。此属性的长度为1。 |
'num_primitive_parameter_extension' | 基元的扩展数据的数量。此属性的长度为1 |
'has_points' | 三维点是否存在。此属性的长度为1。 |
'has_point_normals' | 三维点法线是否存在。此属性的长度为1。 |
'has_triangles' | 三角形是否存在。此属性的长度为1。 |
'has_polygons' | 多边形是否存在。此属性的长度为1。 |
'has_lines' | 线是否存在。此属性的长度为1。 |
'has_xyz_mapping' | 是否存在3D点到图像坐标的映射。此属性的长度为1。 |
'has_shape_based_matching_3d_data' | 是否存在用于基于形状的3D匹配的形状模型。此属性的长度为1。 |
'has_distance_computation_data' | 是否存在用于三维距离计算的预计算数据结构。此属性的长度为1。数据结构可以使用prepare_object_model_3d创建,目的是“distance_computerion”。它由操作符distance_object_model_3d使用。 |
'has_surface_based_matching_data' | 是否存在用于基于曲面的匹配的数据。此属性的长度为1。 |
'has_segmentation_data' | 是否存在用于3D分割的数据。此属性的长度为1。 |
'has_primitive_data' | 原始数据是否存在。此属性的长度为1。 |
'has_primitive_rms' | 基元的二次残差是否存在。此属性的长度为1。 |
'neighbor_distance' | —— |
'neighbor_distance N' | 对于每个点,第N个最近点的距离。 N必须是一个正整数,默认情况下为25。对于每个点,所有其他点都会根据它们的距离进行排序,并返回第N个点的距离。 |
'num_neighbors X' | 对于每个点,距离最多为X的邻居的数量。 |
'num_neighbors_fast X' | 对于每个点,距离最多为X的邻居的近似数量。使用体素来近似距离,与“num_neighbors”相比,处理速度更快。 |
扩展属性是指可以通过特殊运算符(例如distance_object_model_3d)从标准属性派生的属性,或用户定义的属性。操作员set_object_model_3d_attrib可以创建用户定义的属性。可以访问以下扩展属性和元数据:
| 属性名 | 解释 |
|---|---|
'&attribute_name' | 扩展属性的用户定义名称。请注意,此名称必须以“&”开头,例如“&my_attrib”。请求的扩展属性的数据在GenParamValue中返回。返回数据的顺序与在GenParamName中指定的属性名称的顺序相同。 |
'extended_attribute_names' | 所有扩展属性的名称。对于每个扩展属性名称,都会返回一个值。 |
'extended_attribute_types' | 所有扩展属性的类型。对于每个扩展属性类型,都会返回一个值,从而将这些值排序为扩展属性名称的输出。 |
'has_extended_attribute' | 至少存在一个扩展属性。对于每个三维对象模型,都会返回一个值。 |
'num_extended_attribute' | 扩展属性的数量。对于每个三维对象模型,都会返回一个值。 |
Halcon例程
vector_to_hom_mat3d.hdev 从点对应关系近似不同类型的仿射三维变换
triangulate_object_model_3d_xyz_mapping.hdev 对三维对象模型进行三角化(二维映射)
simplify_object_model_3d.hdev 简化复杂的三维对象模型
select_points_object_model_3d_by_density.hdev 基于点密度删除三维对象模型中有噪声的部分
select_points_object_model_3d.hdev 使用阈值删除三维对象模型的部分
select_object_model_3d.hdev 根据体积和直径选择三维对象模型
segment_object_model_3d.hdev 将2.5D数据分段为圆柱形或球形部分
scene_flow_globe.hdev 计算两个立体图像对之间的3D场景流,以恢复对象在3D中的运动
sample_object_model_3d.hdev 使用采样减少三维对象模型中的点数
reduce_object_model_3d_to_visible_parts.hdev 删除三维对象模型中从定义的摄影机姿势看不到的部分
reconstruct_3d_object_model_for_matching.hdev 通过三维配准从多个视图重建用于匹配的三维对象模型
intersect_plane_object_model_3d.hdev 计算三维对象模型和平面之间的交点
interactive_intersection.hdev 交互式计算三维对象模型和平面之间的交点
inspect_3d_surface_intersections.hdev 通过检查三维对象的平面交点来检查安装凸舌的角度和尺寸
genicamtl_lmi_gocator_objectmodel3d.hdev 使用GenICamTL接口从LMI Technologies Gocator传感器数据生成3D对象模型
fuse_object_model_3d_workflow.hdev 设置多个三维对象模型的三维融合参数
fit_primitives_object_model_3d.hdev 将圆柱体装配到2.5D数据中
find_surface_model_with_edges.hdev 使用边缘支持的基于表面的匹配在3D场景中查找纸箱
find_deformable_surface_model.hdev 使用基于可变形曲面的匹配在三维场景中查找对象
disp_object_model_3d.hdev 显示三维对象模型
check_for_holes_sheet_of_light.hdev 使用校准的光设置表来验证孔的存在和正确性
3d_matching_clamps.hdev 使用三维DXF模型识别图像中的三维对象
【3D Object Model之测量Features】 待更新算子
- area_object_model_3d()
- distance_object_model_3d()
- get_object_model_3d_params()
- max_diameter_object_model_3d()
- moments_object_model_3d()
- select_object_model_3d()
- smallest_bounding_box_object_model_3d()
- smallest_sphere_object_model_3d()
- volume_object_model_3d_relative_to_plane()
汇总
本专栏博客汇总:Halcon算子汇总
🚶🚶🚶今天的文章就到这里啦~
喜欢的话,点赞👍、收藏⭐️、关注💟哦 ~
相关文章:
算子)
【四】3D Object Model之测量Features——get_object_model_3d_params()算子
😊😊😊欢迎来到本博客😊😊😊 🌟🌟🌟 Halcon算子太多,学习查找都没有系统的学习查找路径,本专栏主要分享Halcon各类算子含义及用法,有…...

C++学习Day09之系统标准异常
目录 一、程序及输出1.1 系统标准异常示例1.2 标准异常表格 二、分析与总结 一、程序及输出 1.1 系统标准异常示例 #include<iostream> using namespace std; #include <stdexcept> // std 标准 except 异常class Person { public:Person(int age){if (age <…...

企业计算机服务器中了crypt勒索病毒怎么办,crypt勒索病毒解密数据恢复
计算机服务器设备为企业的生产运营提供了极大便利,企业的重要核心数据大多都存储在计算机服务器中,保护企业计算机服务器免遭勒索病毒攻击,是一项艰巨的工作任务。但即便很多企业都做好的了安全运维工作,依旧免不了被勒索病毒攻击…...

npm详解:掌握package.json配置
package.json 文件中的 scripts 配置允许你定义一系列脚本命令,这些命令可以通过 npm run <script-name> 来执行。下面是一些常见的 scripts 配置,以及它们的详解和举例。 常见的 scripts 配置 start 这是最常用的脚本,通常用于启动应…...
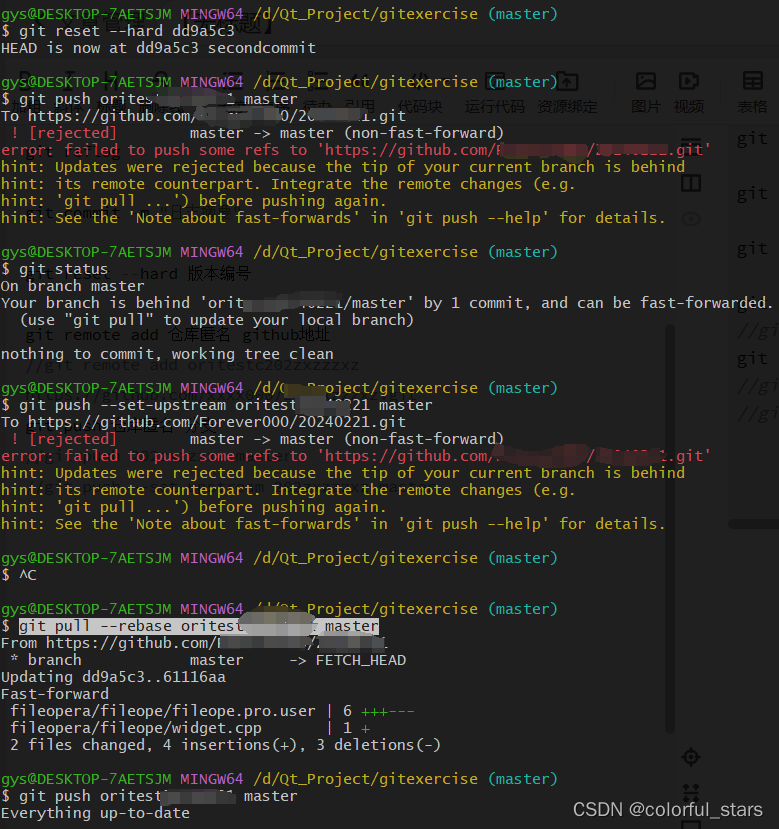
Git基础操作
1、git 基础命令 //克隆远端仓库 git clone http://dddddd.git //初始化仓库 git init //查看状态 git status //添加所有文件到缓存区 git add . //查看版本日志 git reflog //将更新提交到本地仓库 git commit -m "日志摘要" //将当前版本回退到某个版本 git rese…...

怎么卸载Nvidia显卡驱动
在Ubuntu 22.04上卸载Nvidia显卡驱动并手动重新安装的步骤可以分为几个主要部分。请确保在执行这些步骤之前,你已经备份了重要的数据,以防出现任何问题。 卸载当前的Nvidia驱动 打开终端:你可以通过按CtrlAltT快捷键来打开终端。 查找安装的…...

JS进阶——解构赋值
数组解构 基本: let [a, b, c] [1, 2, 3]; // a 1 // b 2 // c 3 可嵌套 let [a, [[b], c]] [1, [[2], 3]]; // a 1 // b 2 // c 3 可忽略 let [a, , b] [1, 2, 3]; // a 1 // b 3 不完全解构 let [a 1, b] []; // a 1, b undefined 剩余运…...
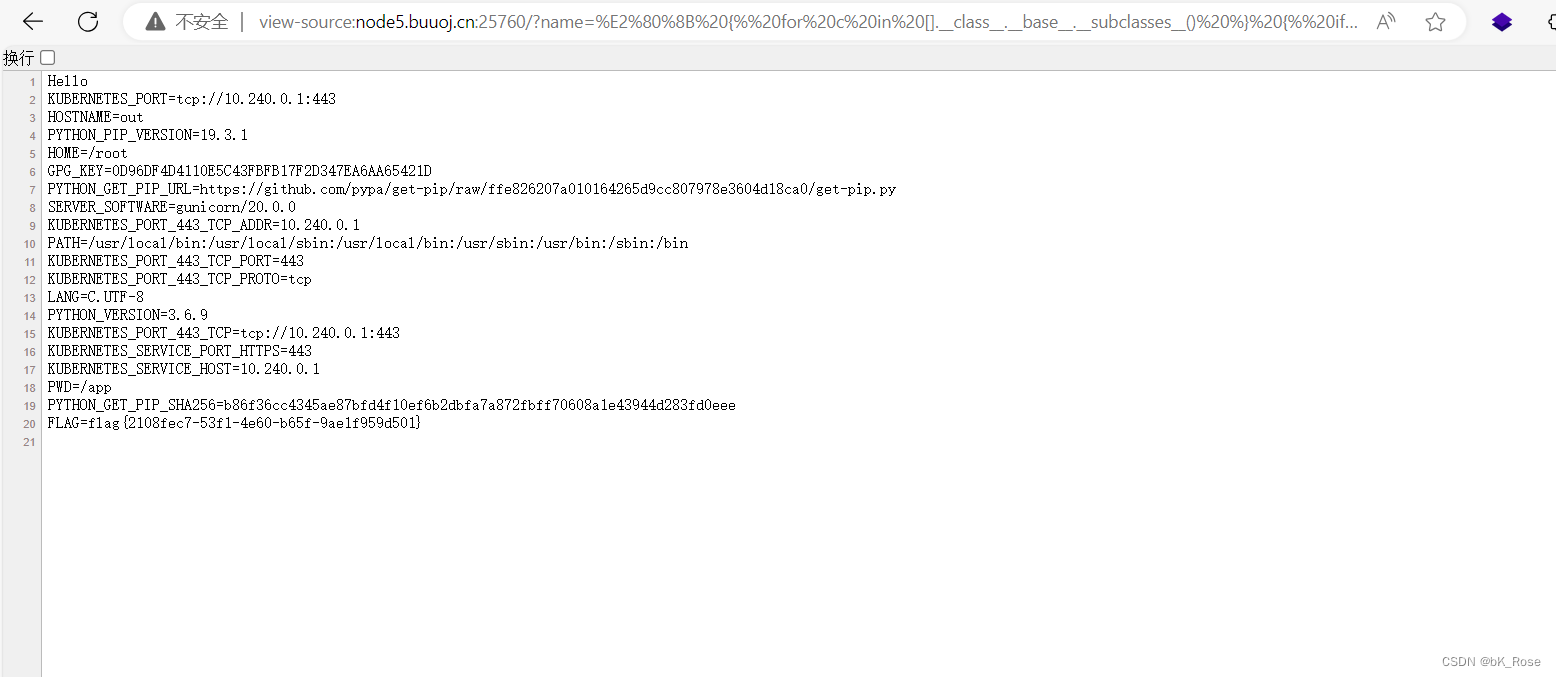
[Flask]SSTI1 buuctf
声明:本篇文章csdn要我一天发两篇所以我来水的 跟ssti注入的详细知识我这里写了 https://blog.csdn.net/weixin_74790320/article/details/136154130 上面链接我复现了vulhub的SSTI,其实本质上是一道题 然后我们就用{{.__class__}}看类的类型…...

k8s学习整理文档
整理文档 实验环境 服务器 最低配置要求: 2 核虚拟 CPU4 GB 内存20 GB 储存空间X 4 台 (三台集群,一台镜像仓库服务器) 网络环境 由于搭建网络需要,同时要让各个主机互通,因此这里需要对云服务器设置专门的网络(同时也需要开放服务器对应的公网 IP) 在云…...

git----->git pull和git fetch区别
git pull 和 git fetch 是 Git 中两个常用的命令,它们都用于从远程仓库获取最新的内容。然而,它们的行为有所不同: git fetch: git fetch 命令用于从远程仓库获取最新的历史记录和数据,但它不会自动合并或修改你当前的工作。它只是…...
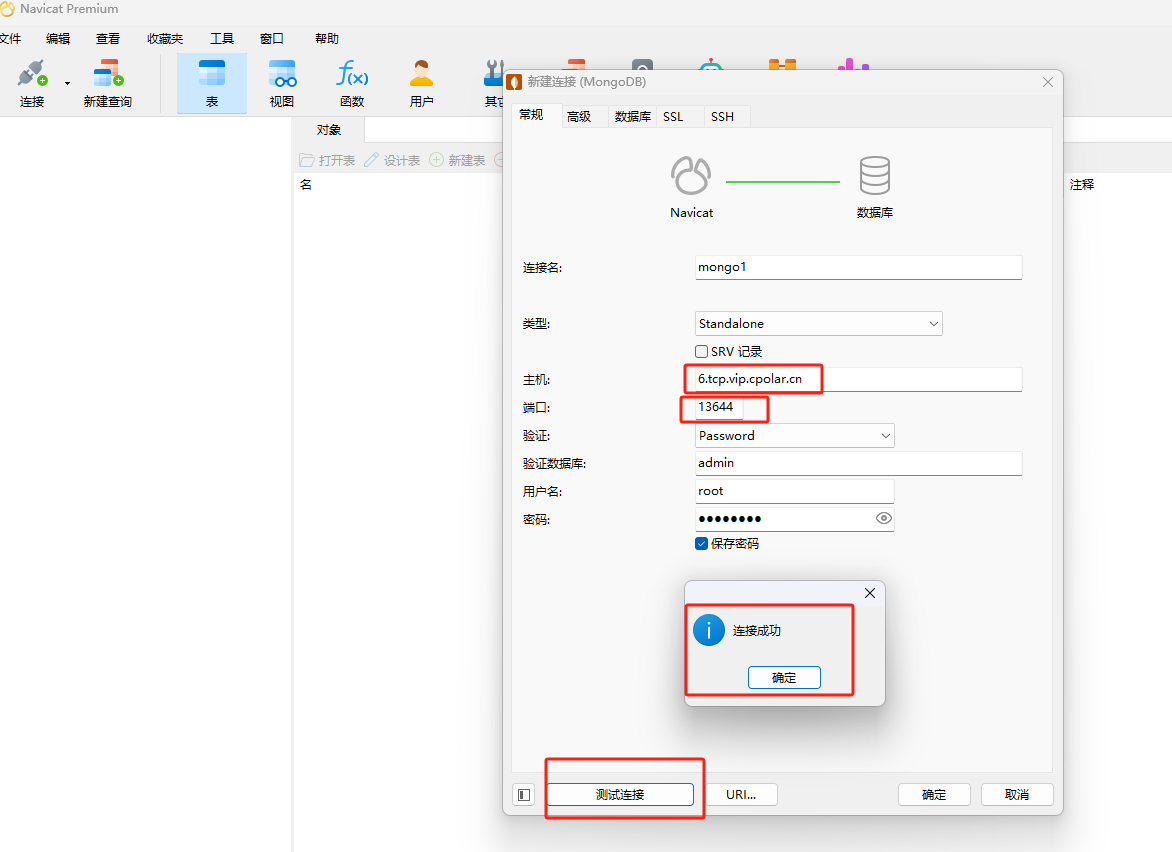
如何使用Docker部署MongoDB并结合内网穿透实现远程访问本地数据库
文章目录 前言1. 安装Docker2. 使用Docker拉取MongoDB镜像3. 创建并启动MongoDB容器4. 本地连接测试5. 公网远程访问本地MongoDB容器5.1 内网穿透工具安装5.2 创建远程连接公网地址5.3 使用固定TCP地址远程访问 正文开始前给大家推荐个网站,前些天发现了一个巨牛的 …...
适用于 Windows 的 12 个最佳 PDF 编辑器
PDF文档的普遍存在按理说,PDF文档的可读性和可移植性受到专业文档的青睐。 然而,PDF格式的可食用性是一大缺陷。幸运的是,各种 PDF 编辑工具和软件使 PDF 的编辑变得更加容易,这篇文章旨在帮助我们的读者找到其中最好的工具和软件…...

C++面试:SQL注入、web shell攻击的危害和规避方法
目录 SQL注入 工作原理 危害 规避方法 示例背景 Web Shell攻击 工作原理 危害 规避方法 SQL注入和Web Shell攻击是两种常见的网络安全威胁,它们可以对系统造成严重的危害。了解它们的工作原理、危害以及如何规避是网络安全防护的基本要求。下面将详细介绍这…...

计算机网络基础之计算机网络组成与分类
计算机网络基础 计算机网络是计算机技术与通信技术发展相结合的产物,并在用户需求的促进下得到进一步的发展。通信技术为计算机之间的数据传输和交换提供了必需的手段,而计算机技术又渗透到了通信领域,提高了通信网络的性能。 计算机网络的…...

怎么使用Git进行版本恢复
场景 在实际工作过程中,有时候会出现以下问题: 1.在使用git对代码进行远程仓库托管时,会出现误操作,怎么恢复上一个版本或指定历史版本? 2.git 误操作,将代码提交到 master 主分支,怎么恢复 …...

三防平板电脑丨亿道工业三防平板丨三防平板定制丨机场维修应用
随着全球航空交通的增长和机场运营的扩展,机场维护的重要性日益凸显。为确保机场设施的安全和顺畅运行,采取适当的措施来加强机场维护至关重要。其中,三防平板是一种有效的工具,它可以提供持久耐用的表面保护,使机场维…...
基于深度学习的红肉新鲜过期判决系统matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1 系统构成与流程 4.2 模型训练与优化 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 MATLAB2022a 3.部分核心程序 ...............................................…...

mysql 锁详解
目录 前言 一、全局锁 二、表级锁 三、行锁 前言 为什么要设计锁,锁设计初衷是为了解决多线程下并发问题。出现并发的时候用锁进行数据同步,避免因并发造成了数据错误(数据覆盖)。可见锁的重要性,并不是所有的数据库都有锁。比如Redis&a…...

【PX4-AutoPilot教程-TIPS】PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法
PX4控制无人机在Gazebo中飞行时由于视角跟随无人机在画面中心导致视角乱晃的解决方法 问题描述解决方法 问题描述 无人机在Gazebo中飞行时,无人机始终处于画面中央,会带着视角乱晃,在Gazebo中进行任何操作视角都无法固定。 观察Gazebo左侧Wo…...
五种多目标优化算法(NSGA2、MOPSO、MSSA、MOGWO、NSWOA)求解9个测试函数,包含6种评价指标(提供MATLAB代码)
一、5种多目标优化算法简介 1.1NSGA2 1.2MOPSO 1.3MSSA 1.4MOGWO 1.5NSWOA 二、5种多目标优化算法性能对比 为了测试5种算法的性能将其求解9个多目标测试函数(zdt1、zdt2 、zdt3、 zdt4、 zdt6 、Schaffer、 Kursawe 、Viennet2、 Viennet3)࿰…...

CTF实战:从ZIP伪加密到二进制文件结构解析
1. ZIP伪加密:CTF中的经典陷阱 第一次参加CTF比赛时,我遇到一个看似简单的MISC题目——解压一个加密的ZIP文件。当时我花了整整两小时尝试各种密码爆破工具,直到队友提醒我:"这可能是伪加密"。这个经历让我深刻认识到&…...
:覆盖LoRA适配器、MoE路由层、Tokenizer预处理3大高危模块)
【独家首发】DeepSeek官方未公开的DRY检查白皮书(v2.3.1内测版):覆盖LoRA适配器、MoE路由层、Tokenizer预处理3大高危模块
更多请点击: https://codechina.net 第一章:DeepSeek DRY原则检查的演进脉络与核心定义 DRY(Don’t Repeat Yourself)作为软件工程基石性原则,在DeepSeek大模型推理与代码生成场景中已从静态语法检查逐步演化为语义感…...

长期项目中使用Taotoken观测用量与优化API调用策略
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期项目中使用Taotoken观测用量与优化API调用策略 在持续数月的开发项目中,团队对大型语言模型的调用往往从简单的功能…...

3分钟让通达信自动画缠论中枢:告别复杂手动画线
3分钟让通达信自动画缠论中枢:告别复杂手动画线 【免费下载链接】ChanlunX 缠中说禅炒股缠论可视化插件 项目地址: https://gitcode.com/gh_mirrors/ch/ChanlunX 还在为缠论分析中的手动画线、笔段划分、中枢识别而烦恼吗?ChanlunX缠论插件为你带…...

终极跨平台KVM解决方案:3分钟掌握Input Leap键盘鼠标共享
终极跨平台KVM解决方案:3分钟掌握Input Leap键盘鼠标共享 【免费下载链接】input-leap Open-source KVM software 项目地址: https://gitcode.com/gh_mirrors/in/input-leap 还在为多台电脑设备间频繁切换键盘鼠标而烦恼吗?Input Leap跨平台KVM软…...

【技术解读】xNIDS:如何为深度学习入侵检测系统“翻译”可执行的主动防御规则?
1. 深度学习入侵检测的"黑盒困境":为什么需要翻译器? 第一次接触深度学习入侵检测系统(DL-NIDS)时,我被它的检测准确率惊艳到了——某些场景下能达到99%以上的识别率。但当我试图把它部署到实际生产环境时&a…...

如何用AI语音修复工具VoiceFixer拯救你的受损录音:终极指南
如何用AI语音修复工具VoiceFixer拯救你的受损录音:终极指南 【免费下载链接】voicefixer General Speech Restoration 项目地址: https://gitcode.com/gh_mirrors/vo/voicefixer 还在为那些珍贵的录音因为各种原因变得模糊不清而烦恼吗?VoiceFixe…...

MPh 开源项目教程
MPh 开源项目教程 【免费下载链接】MPh Pythonic scripting interface for Comsol Multiphysics 项目地址: https://gitcode.com/gh_mirrors/mp/MPh 项目介绍 MPh 是一个基于 Python 的强大开源项目,旨在简化数学物理问题的求解过程。它结合了符号计算的灵活…...

CANN/asc-devkit Mins矢量计算
Mins(灵活标量位置) 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 …...

CANN/hcomm集群信息初始化API
HcclCommInitClusterInfo 【免费下载链接】hcomm HCOMM(Huawei Communication)是HCCL的通信基础库,提供通信域以及通信资源的管理能力。 项目地址: https://gitcode.com/cann/hcomm 产品支持情况 Ascend 950PR/Ascend 950DT࿱…...