2.1 mov、add和sub加减指令实操体验
汇编语言
1. mov操作
1.1 mov移动值
mov指令把右边的值移动到左边
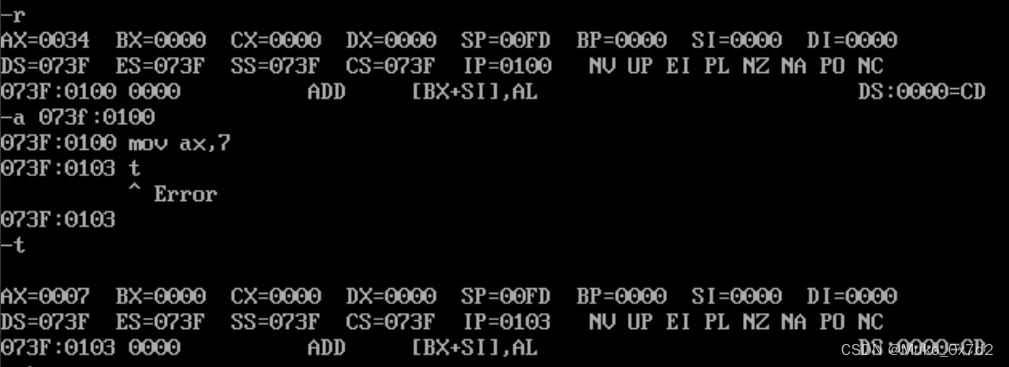
mount c d:masm
c:
debug
r ax
0034
r 073f:0100
mov ax,7t1.2 mov移动寄存器的值
把右边寄存器的值赋值给左边的寄存器
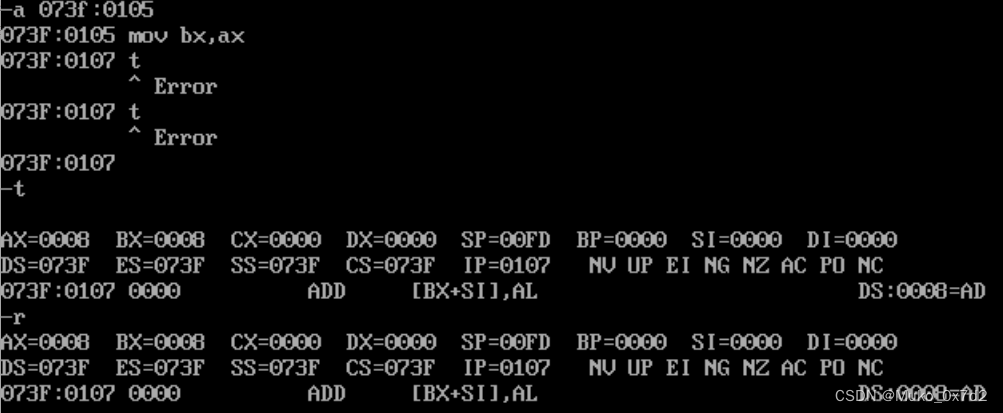
a 073f:0105
mov bx,axt1.3 mov高八位(high)和低八位(low)
把值移动到寄存器的高八位和低八位
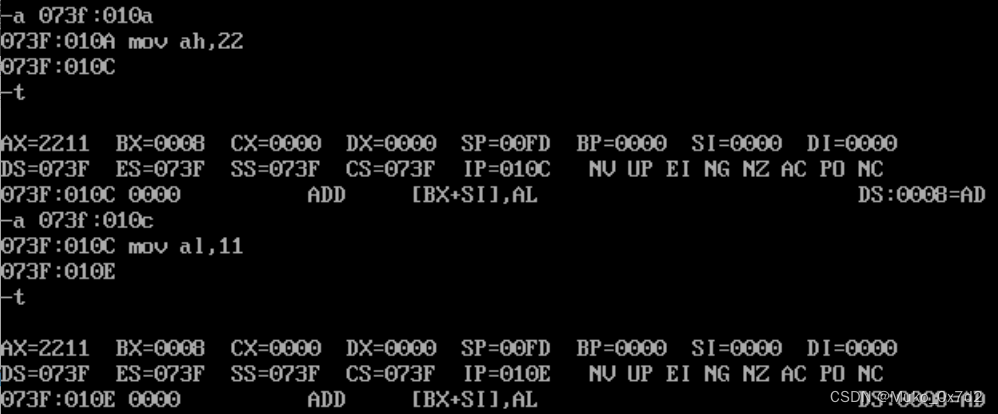
a 073f:010a
mov ah,22ta 073f:010c
mov al,11t2. add操作
2.1 add值
把两个值相加并把结果复制给左边,右边的值不变
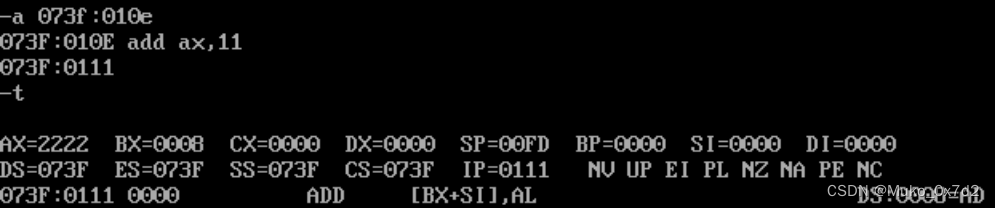
a 073f:010e
add ax,11t2.2 add寄存器相加
把两边的寄存器的值相加并且复制给左边,右边的值不变
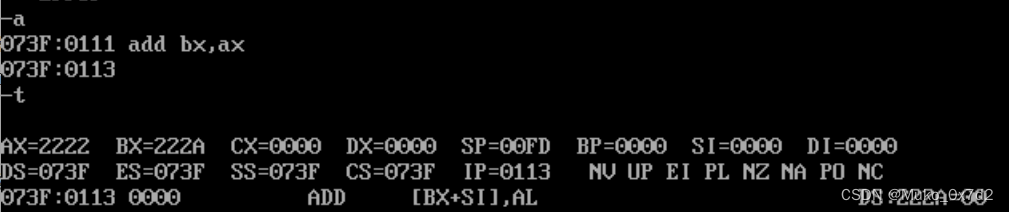
a
add bx,axt2.3 add高八位和低八位
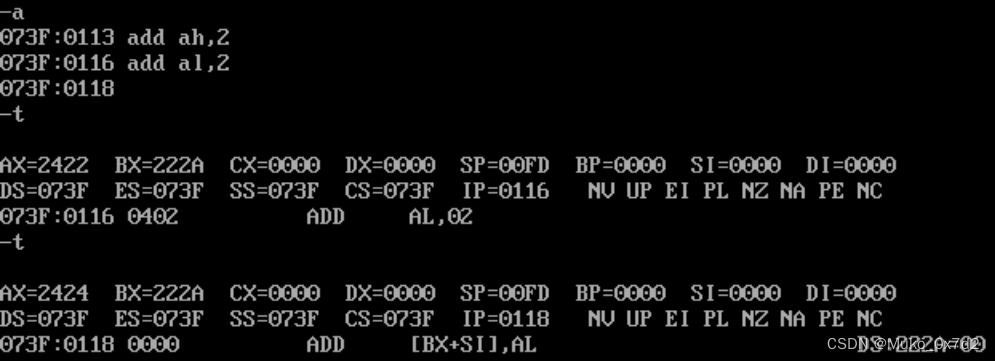
a
add ah,2
add al,2tt2.4 add值溢出后的操作
当值溢出后,会向最高位的前一位进一,但是这个一会被舍弃从而不显示出来
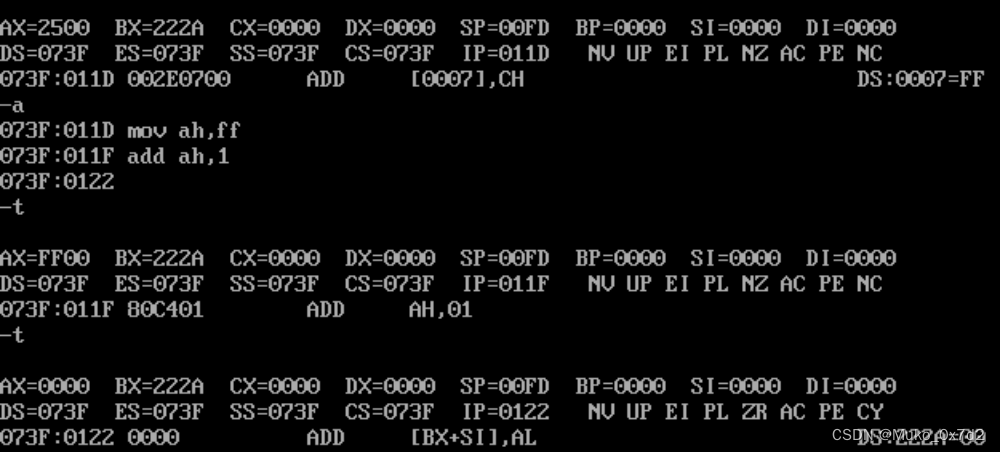
ax最终的结果应该是10000,但是这个1被舍弃了,所以ax为0000
a
mov ah,ff
add ah,1tt3. sub操作
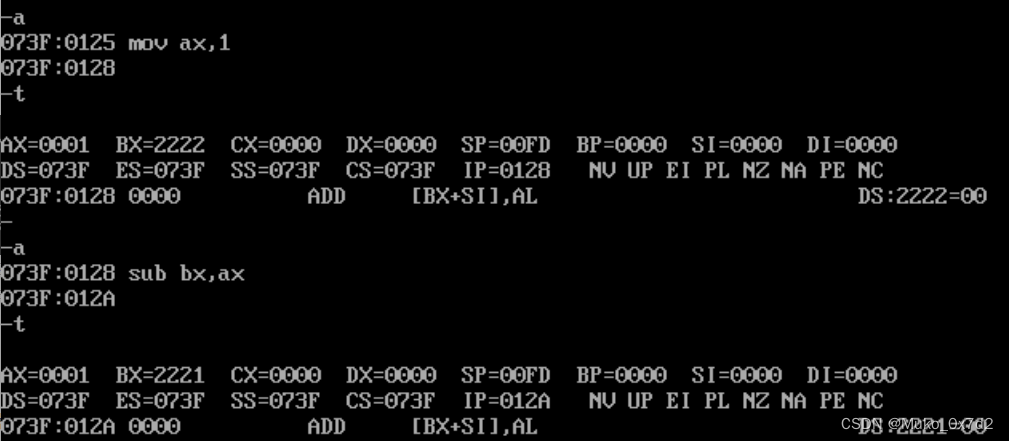
3.1 sub值

3.2 sub寄存器
把左边的值与右边的值相减得到的结果复制给左边,右边的值不变
3.3 sub高八位和低八位
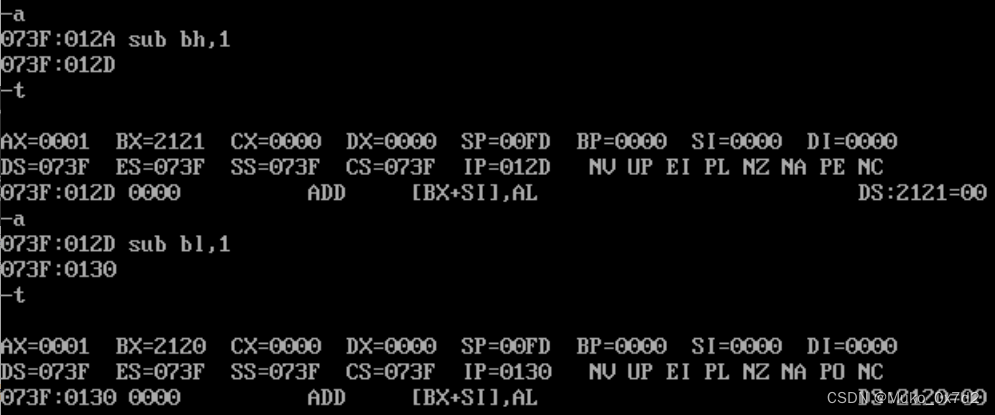
3.4 sub值溢出后的操作
当左边的值比右边的值小时,会向值外也就是虚空借值
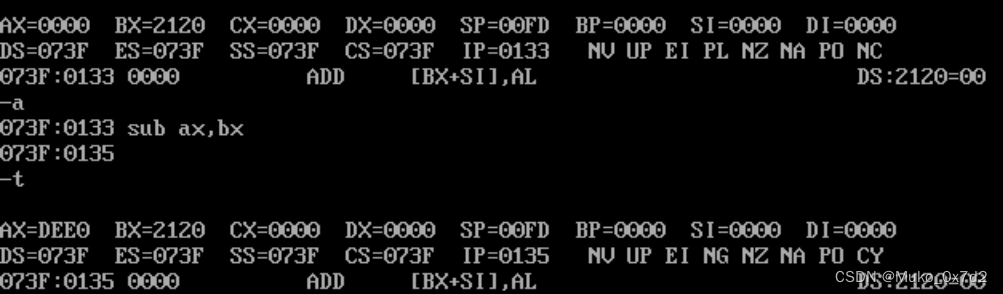
比如ax向最高位一位借一,则为10000,然后用10000-2120得到结果为DEE0
相关文章:
2.1 mov、add和sub加减指令实操体验
汇编语言 1. mov操作 1.1 mov移动值 mov指令把右边的值移动到左边 mount c d:masm c: debug r ax 0034 r 073f:0100 mov ax,7t1.2 mov移动寄存器的值 把右边寄存器的值赋值给左边的寄存器 a 073f:0105 mov bx,axt1.3 mov高八位(high)和低八位&am…...

计算机设计大赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录 1 前言2 先上成果3 车道线4 问题抽象(建立模型)5 帧掩码(Frame Mask)6 车道检测的图像预处理7 图像阈值化8 霍夫线变换9 实现车道检测9.1 帧掩码创建9.2 图像预处理9.2.1 图像阈值化9.2.2 霍夫线变换 最后 1 前言 🔥 优质竞赛项目系列,今天要分…...
有中间件的各类链接和官网信息和漏洞库以及配置问题和开源工具)
中间件安全(概述)有中间件的各类链接和官网信息和漏洞库以及配置问题和开源工具
分类主要包括Apache、IIS、Tomcat、weblogic、websphere、Jboss等相关的技术知识和实践。 以Apache为例讲一讲如何保证中间件安全 中间件安全是指保护中间件软件和服务的安全性,防止被恶意攻击或者滥用。中间件软件是指在操作系统和应用程序之间提供通信和集成功能…...
Unity铰链四杆机构设计和运动仿真
一、效果图 设定好各边长度和转速后,点击【设置并启动】,自动生成一个机构模型,并按照原理进行运转 二、铰链四杆机构介绍 机架:A和D是固定位置,叫做机架。 曲柄:B点绕A点旋转,构成曲柄。 连…...

Python爬虫——解析常用三大方式之Xpath
目录 Xpath 安装xpath 安装lxml库 导入lxml库 解析本地文件 etree.parse() 解析服务器响应文件 etree.HTML() xpath基本语法 小案例:获取百度首页的百度一下 大案例:爬取站长素材图片 总结 Xpath 安装xpath 首先要学会安…...

C#判断DataTable1 A列的集合是否为DataTable2 B列的集合的子集
DataSet ds2 (DataSet)res2.Anything; // 检查 集合B是否为集合A的子集 var table1MaterialCodes ds.Tables[2].AsEnumerable().Select(row > row["Code"]).ToList(); //DataSet1 表Code列集合A var table2MaterialCodes ds2.Tables[0].AsEnumerable().Selec…...
VirtualBox 桥接网卡 未指定 “未能启动虚拟电脑Ubuntu,由于下述物理网卡未找到:”
解决办法,安装虚拟网卡,win11查找方式:控制面板→网络和共享中心→更改适配器设置 此时出现下面情况就算安装成功 但是如果报错:找不到指定的模块 则按下面步骤删除干净垃圾重新上面操作 先安装CCleaner, 链接:CCleaner Makes Y…...
基于yolov5的电瓶车和自行车检测系统,可进行图像目标检测,也可进行视屏和摄像检测(pytorch框架)【python源码+UI界面+功能源码详解】
功能演示: 基于yolov5的电瓶车和自行车检测系统_哔哩哔哩_bilibili (一)简介 基于yolov5的电瓶车和自行车检测系统是在pytorch框架下实现的,这是一个完整的项目,包括代码,数据集,训练好的模型…...
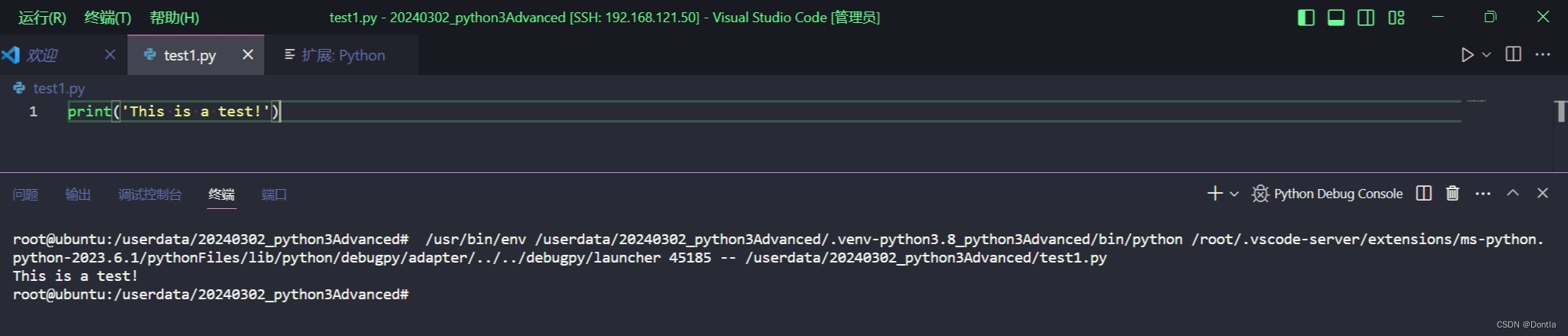
vscode如何远程到linux python venv虚拟环境开发?(python虚拟环境、vscode远程开发、vscode远程连接)
文章目录 1. 安装VSCode2. 安装扩展插件3. 配置SSH连接4. 输入用户名和密码5. 打开远程文件夹6. 创建/选择Python虚拟环境7. 安装Python插件 Visual Studio Code (VSCode) 提供了一种称为 Remote Development 的功能,允许用户在远程系统、容器或甚至 Windows 子系统…...
蓝桥杯第十二届电子类单片机组程序设计
目录 前言 蓝桥杯大赛历届真题_蓝桥杯 - 蓝桥云课(点击查看) 单片机资源数据包_2023(点击下载) 一、第十二届比赛原题 1.比赛题目 2.题目解读 蓝桥杯第十四届电子类单片机组程序设计_蓝桥杯单片机哪一届最难-CSDN博客 二、…...

基于springboot+vue的工作流程管理系统
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...

【LeetCode刷题】146. LRU 缓存
请你设计并实现一个满足 LRU (最近最少使用) 缓存 约束的数据结构。 实现 LRUCache 类: LRUCache(int capacity) 以 正整数 作为容量 capacity 初始化 LRU 缓存int get(int key) 如果关键字 key 存在于缓存中,则返回关键字的值,否则返回 -…...

奇酷网络用AI思维办公:不允许做PPT,只能用Word,只能一页纸
在AI时代,视频制作领域正经历着一场革命。Sora 作为首个文生视频大模型,可能攻克了自然语言处理、计算机视觉和深度学习等难点,使视频生成更真实、自然。奇酷网络是一家很另类、很奇怪的“AI游戏”创业公司,奇酷网络董事长吴渔夫(…...

【笔记】-编程语言以及应用领域
C/C 永远不会衰败的语言,适合偏底层,例如:Windows操作系统80%以上都是由C/C完成的,C/C也集成用于写应用层C/S架构的软件 JAVA 是真正的跨平台的语言 “一次编程,到处使用”Java适合应用层的开发,无论是…...

MWC 2024丨美格智能推出5G RedCap系列FWA解决方案,开启5G轻量化新天地
2月27日,在MWC 2024世界移动通信大会上,美格智能正式推出5G RedCap系列FWA解决方案。此系列解决方案具有低功耗、低成本等优势,可以显著降低5G应用复杂度,快速实现5G网络接入,提升FWA部署的经济效益。 RedCap技术带来了…...
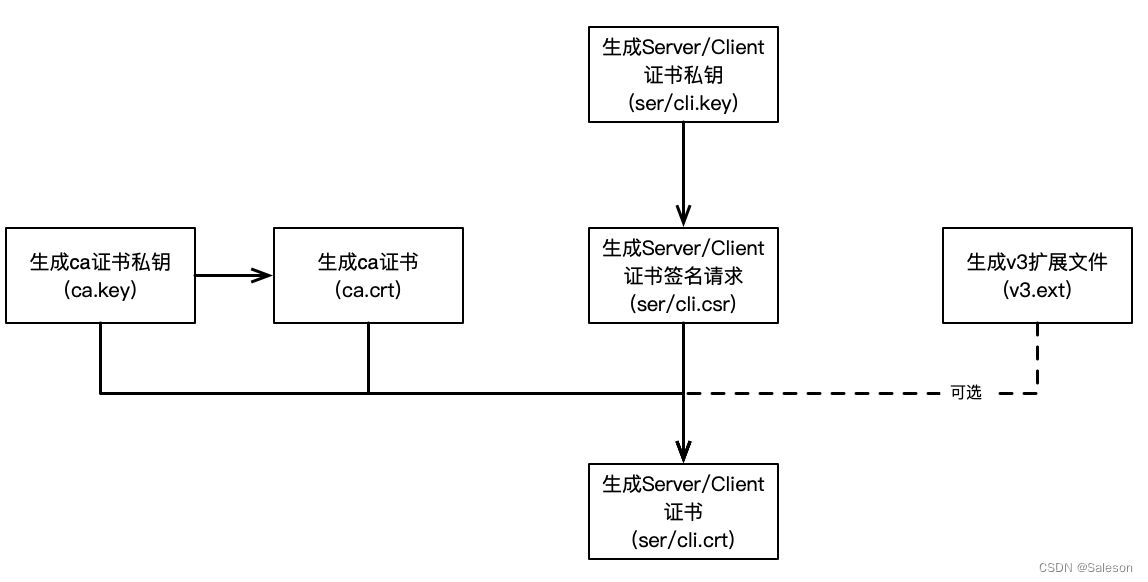
mTLS: openssl创建CA证书
证书可以通过openssl或者keytool创建,在本篇文章中,只介绍openssl。 openssl 生成证书 申请操作流程 生成ca证书私钥, 文件名:ca.key生成ca证书,文件名:ca.crt生成Server/Client 证书私钥,文件名&#x…...

Python 进阶语法:os
3.1.1 文件和目录操作 os.getcwd(): 获取当前工作目录的路径。 import os# 获取当前工作目录 current_directory os.getcwd() print("当前工作目录是:", current_directory) os.chdir(path): 改变当前工作目录到指定的路径。 import os# 改变当前工作目录 os.c…...
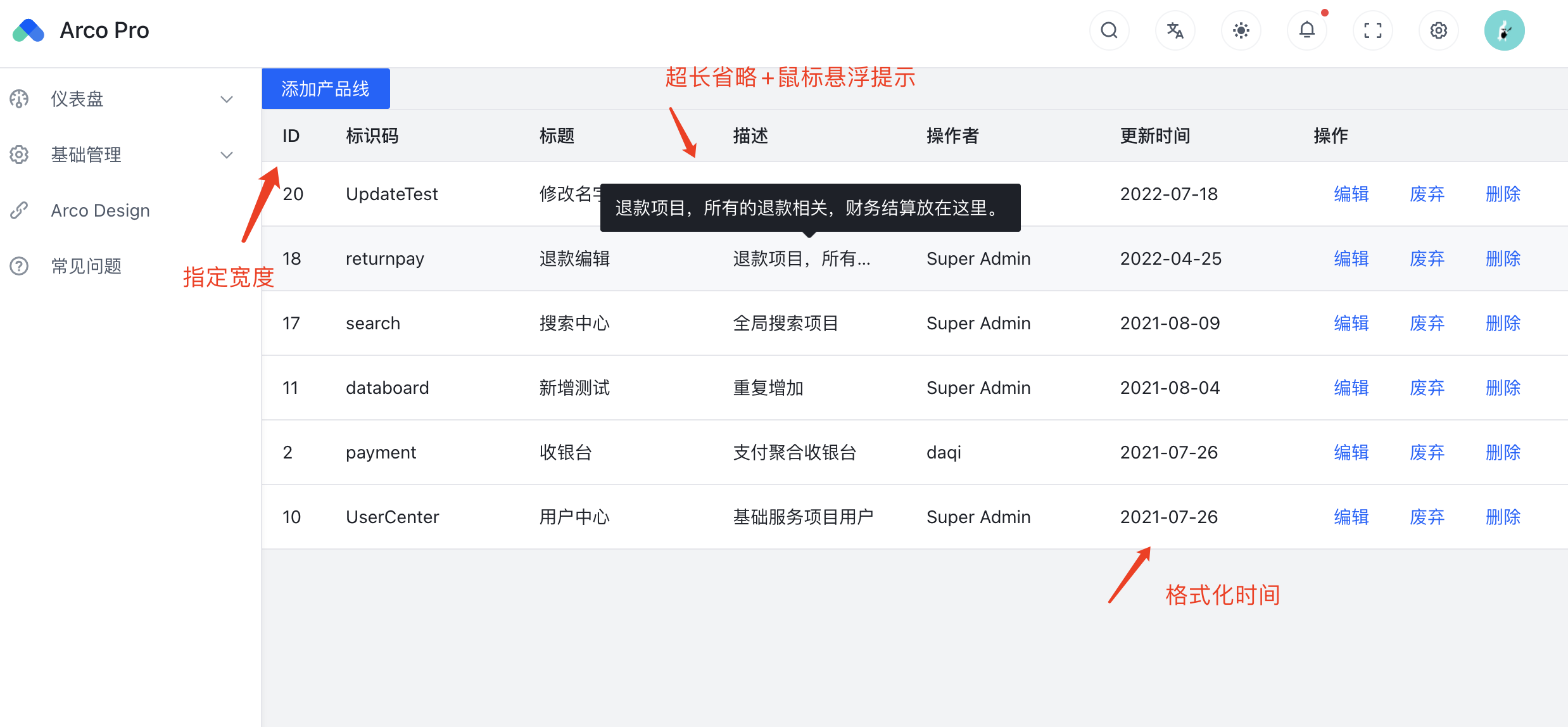
测试需求平台9-Table 组件应用产品列表优化
✍此系列为整理分享已完结入门搭建《TPM提测平台》系列的迭代版,拥抱Vue3.0将前端框架替换成字节最新开源的arco.design,其中约60%重构和20%新增内容,定位为从 0-1手把手实现简单的测试平台开发教程,内容将囊括基础、扩展和实战&a…...

targetSdkVersion > 30 如何将下载的网络视频 保存到手机相册里更新
在 targetSdkVersion 31 中,将下载的网络视频保存到手机相册中涉及几个关键步骤。由于 Android 12(API 级别 31)引入了更多的隐私和安全限制,特别是作用域存储(Scoped Storage),因此你需要遵循这…...
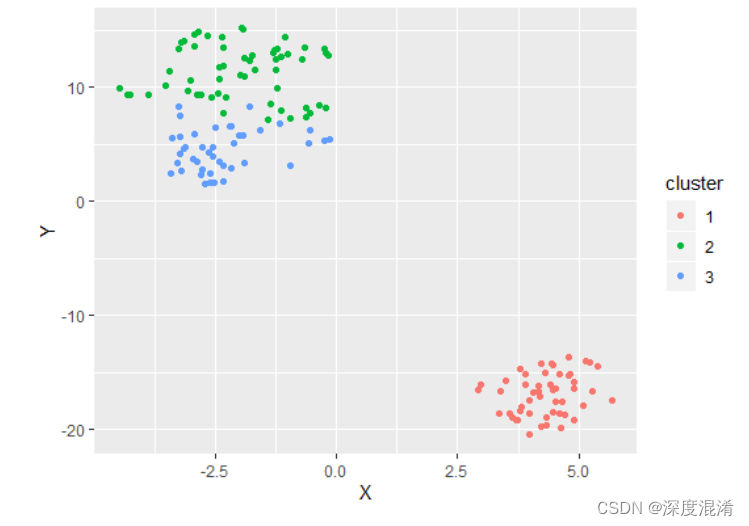
C#,无监督的K-Medoid聚类算法(K-Medoid Algorithm)与源代码
1 K-Medoid算法 K-Medoid(也称为围绕Medoid的划分)算法是由Kaufman和Rousseeuw于1987年提出的。中间点可以定义为簇中的点,其与簇中所有其他点的相似度最小。 K-medoids聚类是一种无监督的聚类算法,它对未标记数据中的对象进行聚…...

LFM2.5-1.2B-Thinking-GGUF一文详解:Liquid AI轻量模型设计哲学与边缘AI演进路径
LFM2.5-1.2B-Thinking-GGUF一文详解:Liquid AI轻量模型设计哲学与边缘AI演进路径 1. 模型概述与设计理念 LFM2.5-1.2B-Thinking-GGUF是Liquid AI团队专为边缘计算场景设计的轻量级文本生成模型。该模型采用1.2B参数规模,在保持较高生成质量的同时&…...

从代码到公路:如何用网页设计体验一把张雪机车的速度与激情?
闲来无事,我设计与制作了一个官网。我想用网页讲一个关于速度与激情的故事。 黑色背景上橙色的光芒划破屏幕,粒子动画如火花般飞溅,3D模型随着鼠标缓缓旋转...这不是在玩游戏,这是在看一台机车。 当其他品牌还在用静态图片展示产…...

燃料电池热管理控制,接受定制,单循环,双循环定制,效率
代码逻辑分析 数据构建:由于没有原始数据,代码中通过分段函数模拟了图中的趋势: 0-600s:保持为 0。 600-700s:出现一个向下的尖峰(约 -0.4),随后迅速反弹至 0.2。 700-1100s…...
)
Elasticsearch分词查询实战:match_phrase与term的5个关键区别(附真实案例)
Elasticsearch分词查询实战:match_phrase与term的5个关键区别(附真实案例) 在构建搜索功能时,Elasticsearch的分词查询是开发者必须掌握的核心技能。面对match_phrase和term这两种看似相似实则差异显著的查询方式,许多…...

从Vivado工程到上电自启:ZYNQ7020双核ARM+FPGA的完整启动流程详解
ZYNQ7020双核ARMFPGA启动全流程深度解析:从比特流到系统自举 当你按下ZYNQ开发板的电源键时,一个精密的启动交响乐便开始演奏——FPGA配置数据从Flash中苏醒,ARM核执行第一条指令,各外设模块按序初始化。这个看似自动化的过程背后…...
、流控帧(FC)到连续帧(CF)的完整数据流拆解)
深入AUTOSAR CAN-TP状态机:从首帧(FF)、流控帧(FC)到连续帧(CF)的完整数据流拆解
深入AUTOSAR CAN-TP状态机:从首帧(FF)、流控帧(FC)到连续帧(CF)的完整数据流拆解 在汽车电子系统的开发中,诊断通信扮演着至关重要的角色。AUTOSAR CAN-TP(CAN Transport Protocol)作为UDS(Unified Diagnostic Service…...
)
【仅限SITS2026参会者解封】:AI微服务弹性扩缩容决策引擎设计手册(含动态负载预测模型Python实现+K8s HPA自定义指标CRD YAML)
第一章:SITS2026分享:AI原生微服务架构设计 2026奇点智能技术大会(https://ml-summit.org) 在SITS2026现场,来自全球头部AI基础设施团队的实践者共同提出“AI原生微服务”范式——它并非传统微服务的简单迁移,而是围绕模型生命周…...

数码管展示
文章目录文章目录1.数码管显示6个91.1 效果图展示1.2 代码2.数码管显示2个72.1 效果图展示2.2 代码3.数码管轮播显示6位3.1 效果图展示3.2 代码4.数码管轮播显示2位4.1 效果图展示4.2 代码5.数码管显示0-55.1 效果图展示6.思考题6.1如何显示数码管1-6轮播6.1.1 效果图展示6.1.2…...

互动小游戏一般多少天能上线?附详细流程 + 案例 + 避坑
本文由长沙圣捷信息技术有限公司(简称:圣捷游戏)整理,以下统称圣捷游戏。🔥 用户核心疑问:互动小游戏多久上线?费用与流程怎么定?当下互动小游戏成品牌引流、活动运营、私域增长的标…...

别再只盯着MSE了!图像配准效果好不好,这5个评价指标你用过几个?
图像配准效果评估:超越MSE的五大核心指标实战指南 在医学影像分析和计算机视觉领域,图像配准技术如同一位精准的"空间协调师",将不同时间、不同视角或不同设备获取的图像对齐到同一坐标系。但如何判断这位"协调师"的工作…...