【STM32+OPENMV】二维云台颜色识别及追踪
一、准备工作
有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32+HAL】与OpenMV通信
有关七针OLED屏显示内容,详情见【STM32+HAL】七针OLED(SSD1306)配置(SPI版)
二、所用工具
1、芯片:STM32F407ZGT6
2、CUBEMX配置软件
3、KEIL5
4、OPENMV
三、实现功能
二维云台追踪最大色块,并显示中心x,y坐标至OLED
四、HAL配置步骤
1、生成两路PWM波控制舵机
周期为20ms

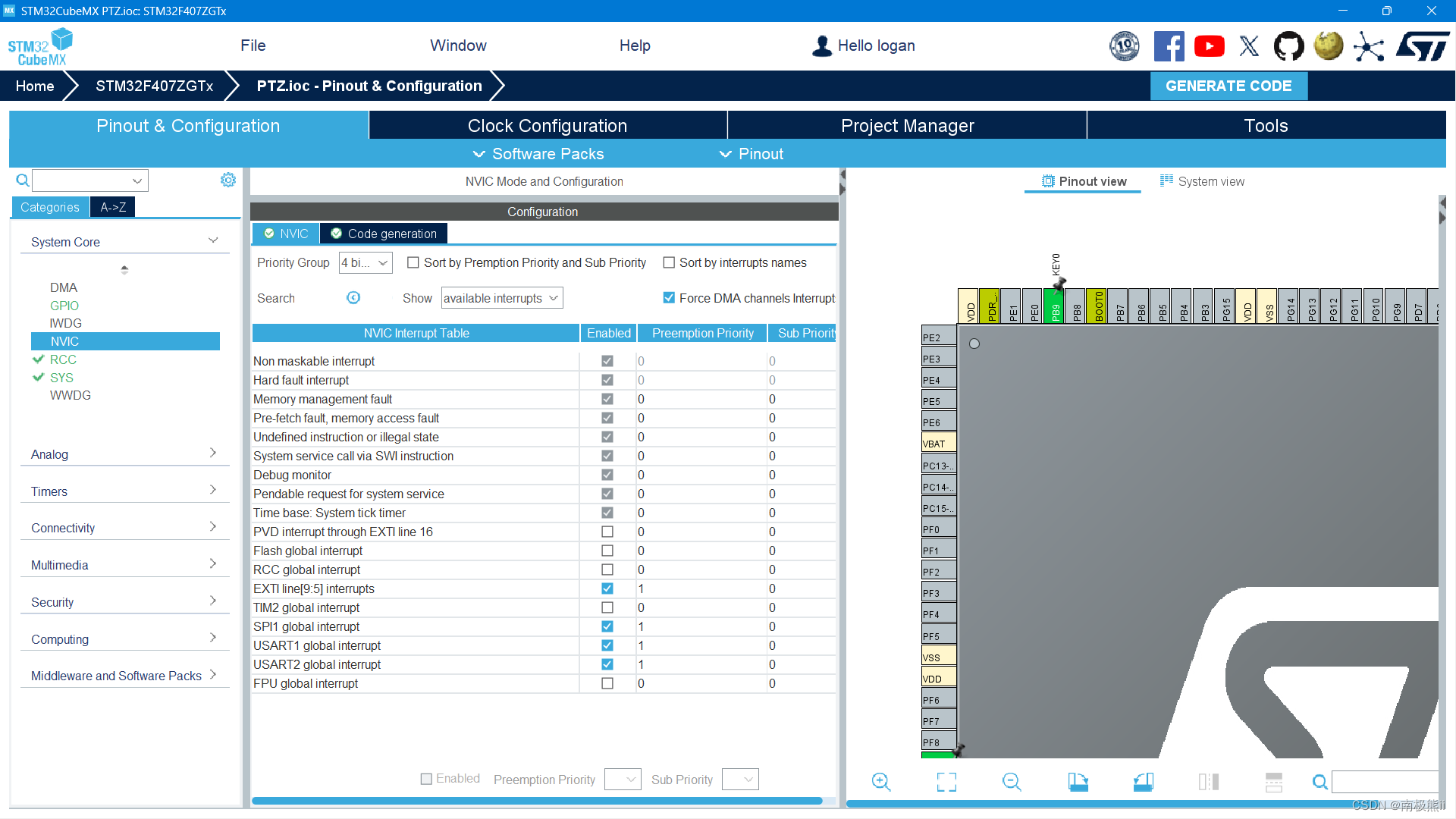
2、中断配置
五、KEIL填写代码
1、ptz.c
#include "ptz.h"
#include "string.h"
#include "stdio.h"
#include "stdlib.h"
#include "main.h"
#include "tim.h"
#include "usart.h"#define RXBUFFERSIZE 256
#define CCR_UD TIM2->CCR2 //up and down.... RANGE:420-2000
#define CCR_LR TIM2->CCR3 //Left and Right.... RANGE:420-2500
#define Cen_x 160 //x轴中心坐标值
#define Cen_y 120 //y轴中心坐标值#define sp1 7 //x轴速度
#define sp2 6 //y轴速度
#define range 40 //识别范围char RxBuffer[RXBUFFERSIZE],rx_buf[RXBUFFERSIZE];
uint8_t aRxBuffer;
uint8_t Uart1_Rx_Cnt = 0;int cnt_rx=0,cnt_dt=0;
int cx=0,cy=0;void Tilt(void)
{if(cx < (Cen_x-range)) CCR_LR = (CCR_LR>2450)?2450:CCR_LR+sp1;else if (cx > (Cen_x+range)) CCR_LR = (CCR_LR<450)?450:CCR_LR -sp1;else CCR_LR= CCR_LR;if(cy < (Cen_y-range)) CCR_UD = (CCR_UD<420)?420:CCR_UD -sp2;else if (cy > (Cen_y+range)) CCR_UD = (CCR_UD>1800)?1800:CCR_UD+sp2;else CCR_UD= CCR_UD;
}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{UNUSED(huart);if(huart==&huart2){RxBuffer[Uart1_Rx_Cnt] = aRxBuffer;Uart1_Rx_Cnt++;if((RxBuffer[Uart1_Rx_Cnt-1] == 0xb3)&&(RxBuffer[Uart1_Rx_Cnt-2] == 0xb3)) cnt_rx=1; //帧头判定else if((RxBuffer[Uart1_Rx_Cnt-2] == 0x0d)&&(RxBuffer[Uart1_Rx_Cnt-1] == 0x0a)) cnt_rx=2; //帧尾判定else cnt_rx=0;switch (cnt_rx){case 1:Uart1_Rx_Cnt = 0;memset(RxBuffer,0x00,sizeof(RxBuffer));break;case 2:RxBuffer[Uart1_Rx_Cnt-1] = '\0';RxBuffer[Uart1_Rx_Cnt-2] = '\0';strcpy(rx_buf,RxBuffer);int st=0; //有效数值开始位置cnt_dt=0; //空格数for(int i=0;rx_buf[i];i++){if(cnt_dt==4) break;if(rx_buf[i]==' ') {cnt_dt++;int temp=0;for(int j=st;j<i;j++)temp=temp*10+(rx_buf[j]-'0');switch (cnt_dt){case 1:cx=temp;break;case 2:cy=temp;break;}st=i+1;}}while(HAL_UART_GetState(&huart2) == HAL_UART_STATE_BUSY_TX);Uart1_Rx_Cnt = 0;memset(RxBuffer,0x00,sizeof(RxBuffer));break;default:break;}HAL_UART_Receive_IT(&huart2, (uint8_t *)&aRxBuffer, 1);}
}
2、main.c
/* USER CODE BEGIN 2 */OLED_Init();HAL_UART_Receive_IT(&huart2, (uint8_t *)&aRxBuffer, 1);TIM2->CCR2 = 420-1;TIM2->CCR3 = 1400-1;HAL_TIM_PWM_Start (&htim2, TIM_CHANNEL_2);HAL_TIM_PWM_Start (&htim2, TIM_CHANNEL_3);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){OLED_ShowNum(30,20,cx,3,16);OLED_ShowNum(30,40,cy,3,16);OLED_Refresh();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if(flag) Tilt();}/* USER CODE END 3 */
}
3、按键控制暂停
/* USER CODE BEGIN 4 */void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == KEY0_Pin){HAL_Delay(20); //延时消抖if(GPIO_Pin == KEY0_Pin){flag=0;}}
}
/* USER CODE END 4 */
六、巨人之肩
【毕业设计】基于STM32及OpenMV的云台追踪装置
电赛:二维云台控制
【毕业设计】基于STM32F103C8T6最小系统板与OpenMV的二维云台PID控制追踪系统
后续优化方案:PID调控
位置式PID与增量式PID区别浅析
七、源码提供
【STM32+OPENMV】二维云台颜色识别及追踪【无PID版】
相关文章:
【STM32+OPENMV】二维云台颜色识别及追踪
一、准备工作 有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32HAL】与OpenMV通信 有关七针OLED屏显示内容,详情见【STM32HAL】七针OLED(SSD1306)配置(SPI版) 二、所用工具 1、芯片:STM32F407ZGT6 2、CUBEMX配置软件 3、KEIL5 4…...
JavaScript基础3之面向对象关于面向过程、函数式编程、对比、构造函数、原型
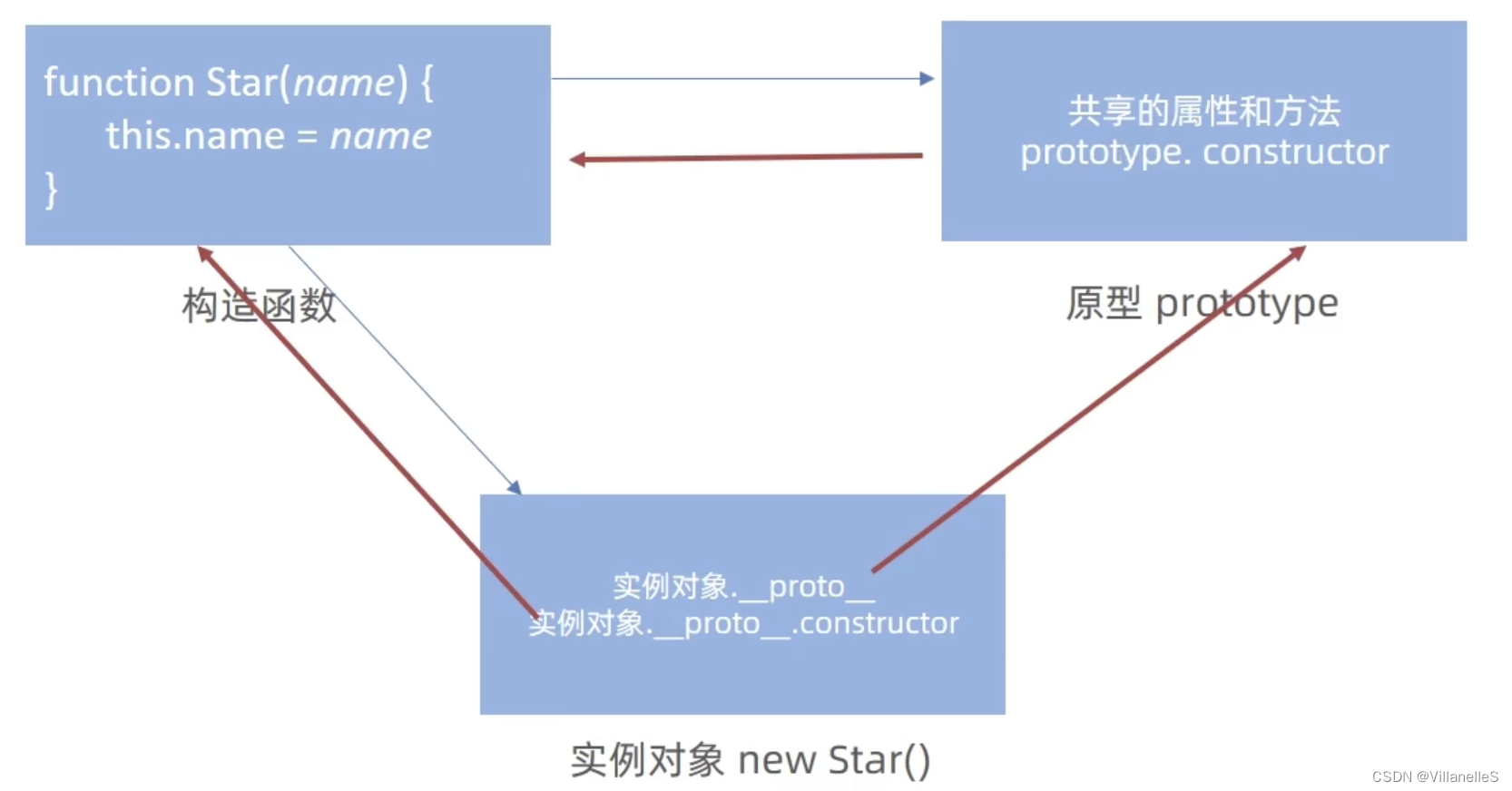
JavaScript基础 面向对象面向过程函数式编程命令式编程函数式编程特性副作用透明引用不可变变量函数是一等公民 常见的函数式编程模型 面向对象为什么要使用面向对象封装继承多态 对比面向过程函数式编程面向对象 构造函数原型constructor使用场景 对象原型 面向对象 面向过程…...

运用Tensorflow进行目标检测
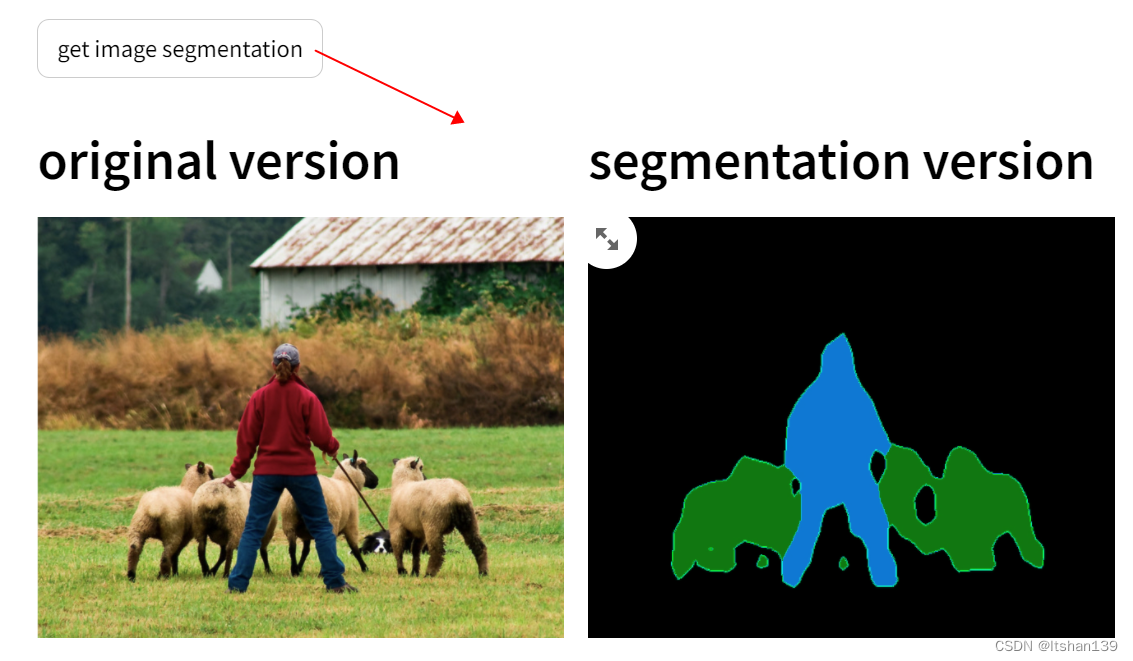
对象检测是一种计算机视觉技术,它使软件系统能够从给定的图像或视频中检测、定位并跟踪物体。对象检测的一个特殊属性是它能识别对象的类别(如人、桌子、椅子等)并在给定图像中指出其具体位置坐标。这个位置通常通过在物体周围绘制一个边界框…...
【源码】imx6ull实现触摸屏单点实验-移植tslib和qt
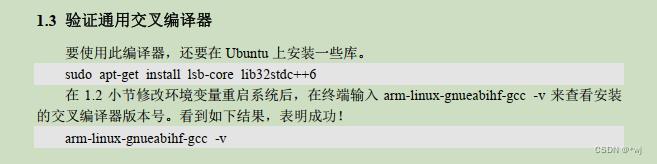
一、本实验实验的器材: 1.正点原子imx6ull的阿尔法开发板v2.2 2.屏幕ALIENTEK 4.3 RGBLCD 二、实验已经移植好的文件: 仓库代码:https://gitee.com/wangyoujie11/atkboard_-linux_-driver.git 1.文件说明 arm-qt.tar.bz2:移植好的…...
【JSON2WEB】07 Amis可视化设计器CRUD增删改查
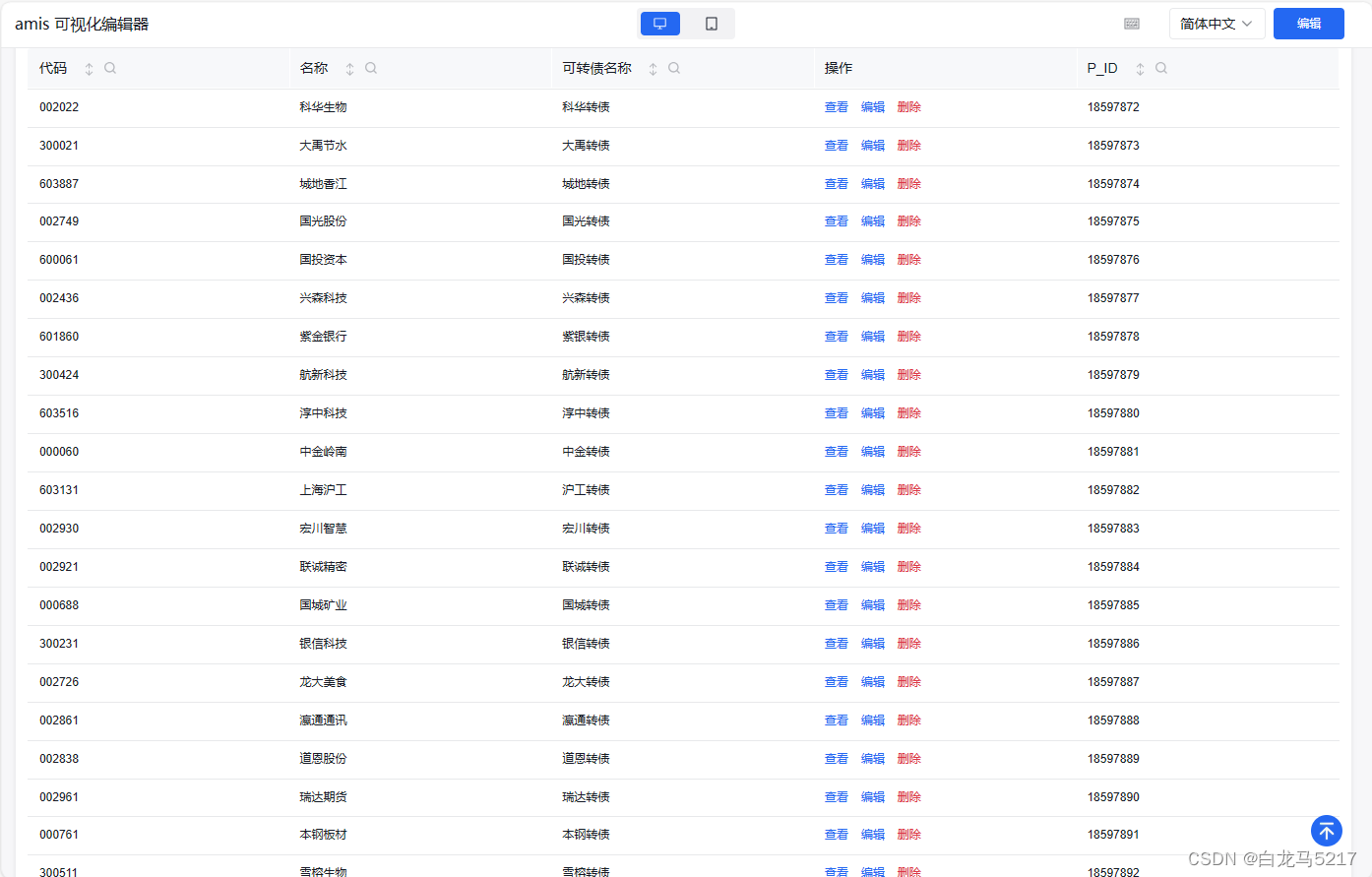
总算到重点中的核心内容,CRUD也就是增删改查,一个设计科学合理的管理信息系统,95%的就是CRUD,达不到这个比例要重新考虑一下你的数据库设计了。 1 新增页面 Step 1 启动amis-editor Setp 2 新增页面 名称和路径随便命名…...

ThreeJs同一个场景多个相机的显示
在threeJs开发数字孪生中,我们正常是需要使用一个相机,画面显示的内容也就是这个相机拍摄到的内容,但是是否可以添加多个相机,可以同时从不同角度观察模型呢,实际上是可以的,不过多个相机的拍摄到的画面肯定…...

Vue基础篇
Vue Vue是一套用于构建用户界面的渐进式JavaScript框架 什么是渐进式? Vue可以自底向上逐层地应用; 当构建简单应用时, 只需一个轻量小巧的核心库; 当构建复杂应用时, 可以引入各式各样的Vue插件 Vue具有以下特点: 采用组件化模式, 提高代码复用率且让代码更好维护 声明式编…...
计算机视觉基础知识(十六)--图像识别
图像识别 信息时代的一门重要技术;目的是让计算机代替人类处理大量的物理信息;随着计算机技术的发展,人类对图像识别技术的认识越来越深刻;图像识别技术利用计算机对图像进行处理\分析\理解,识别不同模式的目标和对象;过程分为信息的获取\预处理\特征抽取和选择\分类器设计\分…...

数仓开发-2023/2/29
1.简单自我介绍 2.介绍下之前的公司离线数仓项目 3.sql和hivesql区别? 4.sql的执行顺序? 5.hive的优化 6.说下你之前公司来,你的技能层次在每个公司?你怎么评价你的技能? 7.你的之前业务主要是做什么?我说了…...
ipv6过渡技术-IPv4 over IPv6隧道示例
实验拓扑如下: 环境概述: PC1和PC2与路由器之间为IPv4网络。两台路由器之间为IPv6网络,通过配置,要求是PC1与PC2能互通。即使IPv4可以在IPv6网络中通信。 配置方法: AR1: # ipv6 # interface Gigabi…...
SpringBoot约定大于配置
什么是约定大于配置 "约定大于配置"(Convention Over Configuration)是一种理念,旨在通过默认约定和规则来减少开发人员需要做的配置工作。在Spring Boot框架中,这一原则得到了充分应用,帮助开发者更快地构…...
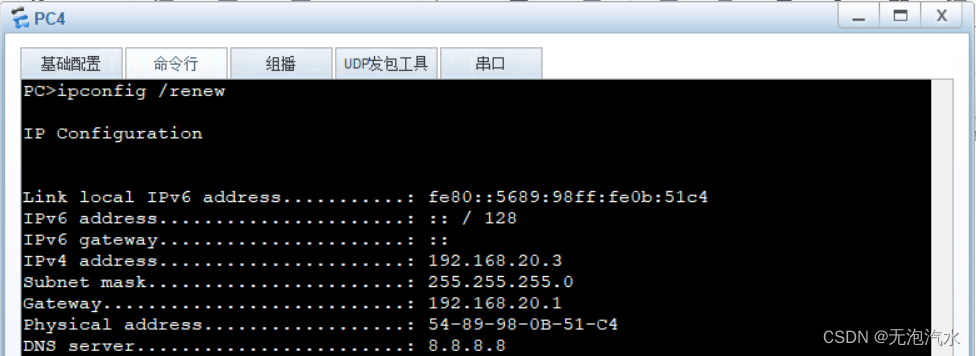
DHCP自动获取IP地址实验(华为)
思科设备参考:DHCP自动获取IP地址实验(思科) 一,实验目的 路由器搭载DHCP,让PC通过DHCP自动获取IP地址 二,不划分vlan--全局地址池 实验拓扑 配置命令 Router <Huawei>system-view [Huawei]ip po…...

探索Terraform实践:优化基础设施管理
Terraform 是管理基础设施及代码(IaC)最常用的工具之一,它能使我们安全且可预测地对基础设施应用更改。 Terraform作为一个强大的基础设施即代码工具,为开发人员和运维团队提供了一种简单而强大的方式来定义、部署和管理基础设施。…...

MYSQL高级_目录
2024持续更新中… MYSQL01高级_Linux版安装、各级别字符集、字符集与比较规则、SQL大小写规范 MYSQL02高级_目录结构、默认数据库、表文件、系统独立表空间 MYSQL03高级_新增用户、授予权限、授权底层表结构、角色理解 MYSQL04高级_逻辑架构剖析、查询缓存、解析器、优化器、执…...

MongoDB获评2023年Gartner®云数据库管理系统“领导者”
MongoDB 很荣幸在《2023 年 Gartner 云数据库管理系统 (CDBMS) 魔力象限》报告中被评为领导者。我们相信这一成就让 MongoDB 成为唯一一家连续两年斩获“领导者”称号的纯应用程序数据库服务提供商。 社区及开发者数据平台用户的需求一向是 MongoDB 关注的重点,而这…...
基于FastAPI构造一个AI模型部署应用
前言 fastapi是目前一个比较流行的python web框架,在大模型日益流行的今天,其云端部署和应用大多数都是基于fastapi框架。所以掌握和理解fastapi框架基本代码和用法尤显重要。 需要注意的是,fastapi主要是通过app对象提供了web服务端的实现代…...
【Unity】使用ScriptableObject存储数据
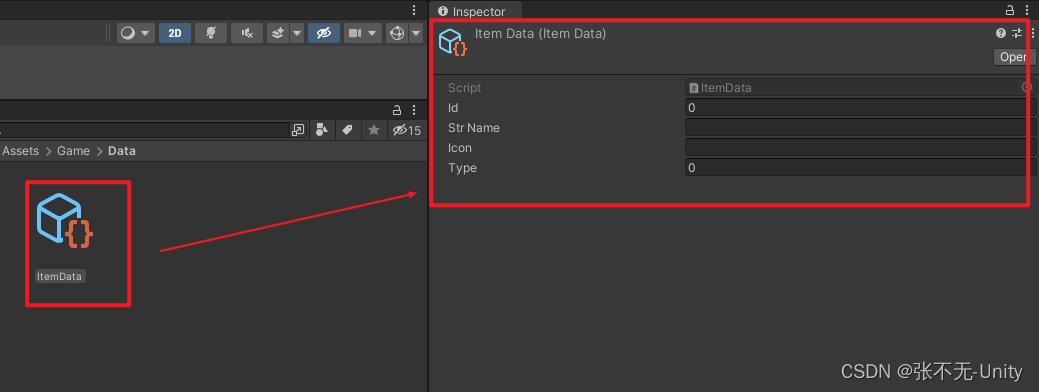
1.为什么要用ScriptableObject? 在游戏开发中,有大量的配置数据需要存储,这个时候就需要ScriptableObject来存储数据了。 很多人会说我可以用json、xml、txt,excel等等 但是你们有没有想过,假设你使用的是json&#x…...

ChatGPT聊天机器人数据隐私和安全问题
ChatGPT是否安全使用? 是的,ChatGPT是安全的,因为它无法对你或你的计算机造成任何直接损害。由于网页浏览器和智能手机操作系统都使用了沙箱技术,因此ChatGPT无法访问你设备的其余部分。换句话说,当你使用ChatGPT应用程…...

MyBatis三个经典问题
1. Mybatis的执行流程 MyBatis 是一个流行的 Java 持久化框架,提供了对象关系映射 (ORM) 和 SQL 映射的功能,使开发者能够更加方便地与数据库交互。MyBatis 的执行流程大致如下: 配置阶段: 加载配置文件: MyBatis 通过读取配置文件ÿ…...

JavaEE+springboot教学仪器设备管理系统o9b00-springmvc
本文旨在设计一款基于Java技术的教学仪器设备销售网站,以提高网站性能、功能完善、用户体验等方面的优势,解决现有教学仪器设备销售网站的问题,并为广大教育工作者和学生提供便捷的教学仪器设备销售渠道。本文首先介绍了Java技术的相关基础知…...

6.6k Star 这个内网穿透神器,一行命令开通公网域名,前后端联调神器!
👉 这是一个或许对你有用的社群🐱 一对一交流/面试小册/简历优化/求职解惑,欢迎加入「芋道快速开发平台」知识星球。下面是星球提供的部分资料: 《项目实战(视频)》:从书中学,往事中…...

告别繁琐操作:Super IO插件实现Blender批量导入导出智能化解决方案
告别繁琐操作:Super IO插件实现Blender批量导入导出智能化解决方案 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io 在3D建模工作流中,最耗时的往往不是创意设计…...

如何5分钟部署小鹿快传:零基础P2P文件传输终极指南
如何5分钟部署小鹿快传:零基础P2P文件传输终极指南 【免费下载链接】deershare 小鹿快传,一款在线P2P文件传输工具,使用WebSocket WebRTC技术 项目地址: https://gitcode.com/gh_mirrors/de/deershare 小鹿快传(DeerShare…...

Hotkey Detective:3分钟找出Windows热键冲突元凶,重获键盘控制权
Hotkey Detective:3分钟找出Windows热键冲突元凶,重获键盘控制权 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-de…...
)
从‘看不见’到‘毁不掉’:深入聊聊数字水印的鲁棒性到底怎么测(附常见攻击模拟方法)
数字水印鲁棒性测试实战指南:从理论到攻击模拟 数字水印技术已经从单纯的学术研究走向了广泛的商业应用,成为版权保护领域不可或缺的一环。但真正决定一个水印系统实用价值的,是其抵抗各种攻击的鲁棒性——这项指标直接关系到水印能否在现实…...

AI赋能能耗管理:解锁智能照明低碳运维新范式
摘要在双碳战略全面落地、智慧楼宇数字化转型的浪潮下,智能照明已广泛应用于商业园区、市政道路、写字楼等各类场景。传统照明能耗管理模式粗放,存在能耗数据模糊、浪费隐蔽、管控滞后、节能无依据等痛点,大量无效耗电持续增加运营成本。新一…...

不只是驱动问题!深挖华硕飞行堡垒风扇控制逻辑:ATK、热键服务与系统电源管理的三角关系
华硕飞行堡垒风扇控制逻辑深度解析:ATK、热键服务与系统电源管理的协同机制 当你的华硕飞行堡垒笔记本按下FNF5组合键却毫无反应时,多数教程会告诉你"重装驱动就能解决"。但作为技术爱好者,我们更关心的是:为什么驱动安…...

AutoCAD字体管理终极指南:如何彻底解决字体缺失问题
AutoCAD字体管理终极指南:如何彻底解决字体缺失问题 【免费下载链接】FontCenter AutoCAD自动管理字体插件 项目地址: https://gitcode.com/gh_mirrors/fo/FontCenter 还在为AutoCAD字体缺失问题而烦恼吗?FontCenter是您的专业字体管理解决方案&a…...

CANN/asc-devkit bfloat16精度转换函数
__float22bfloat162_rd 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://…...
)
EI会议投稿踩坑记:手把手教你搞定PDF Express字体嵌入和合规邮件(附免费工具)
EI会议投稿实战指南:从PDF字体嵌入到合规邮件的全流程解析 第一次向EI/IEEE会议投稿的研究者,往往会在技术环节遭遇意想不到的阻碍。其中PDF格式合规性问题——尤其是字体未嵌入错误——堪称新手"杀手"。本文将带你深入理解字体嵌入原理&#…...