香橙派5使用NPU加速yolov5的实时视频推理(二)
三、将best.onnx转为RKNN格式
这一步就需要我们进入到Ubuntu20.04系统中了,我的Ubuntu系统中已经下载好了anaconda,使用anaconda的好处就是可以方便的安装一些库,而且还可以利用conda来配置虚拟环境,做到环境与环境之间相互独立。
对于我来说,使用了以下命令创建了一个名为rknn_ceshi的虚拟环境
conda create -n rknn_ceshi python=3.8
之后,点击GitHub - rockchip-linux/rknn-toolkit2把整个项目给下载下来,解压后,我们进入刚刚创立虚拟环境下安装rknn-toolkit2。进入doc目录后,输入命令
pip install -r requirements_cp38-1.4.0.txt -i https://mirror.baidu.com/pypi/simple这里一定要带上百度的镜像源,要不然会报错,这个坑折磨了我整整3小时。
安装完成后,出现下面的界面就说明已经安装好了
接下来,我们进入packages文件夹,输入一下命令
pip install rknn_toolkit2-1.4.0_22dcfef4-cp38-cp38-linux_x86_64.whl出现以下界面,但是这里一定要注意,有一个超级大坑,超级大坑,超级大坑,后续我也是询问了大佬才解决的这个问题,这个地方安装的是rknn-toolkit2-1.4.0-22dcfef4!!!
出现上面那个界面后,我们在终端输入python,再输入以下命令,如果没有报错,则证明我们的环境已经搭载好了
from rknn.api import RKNN
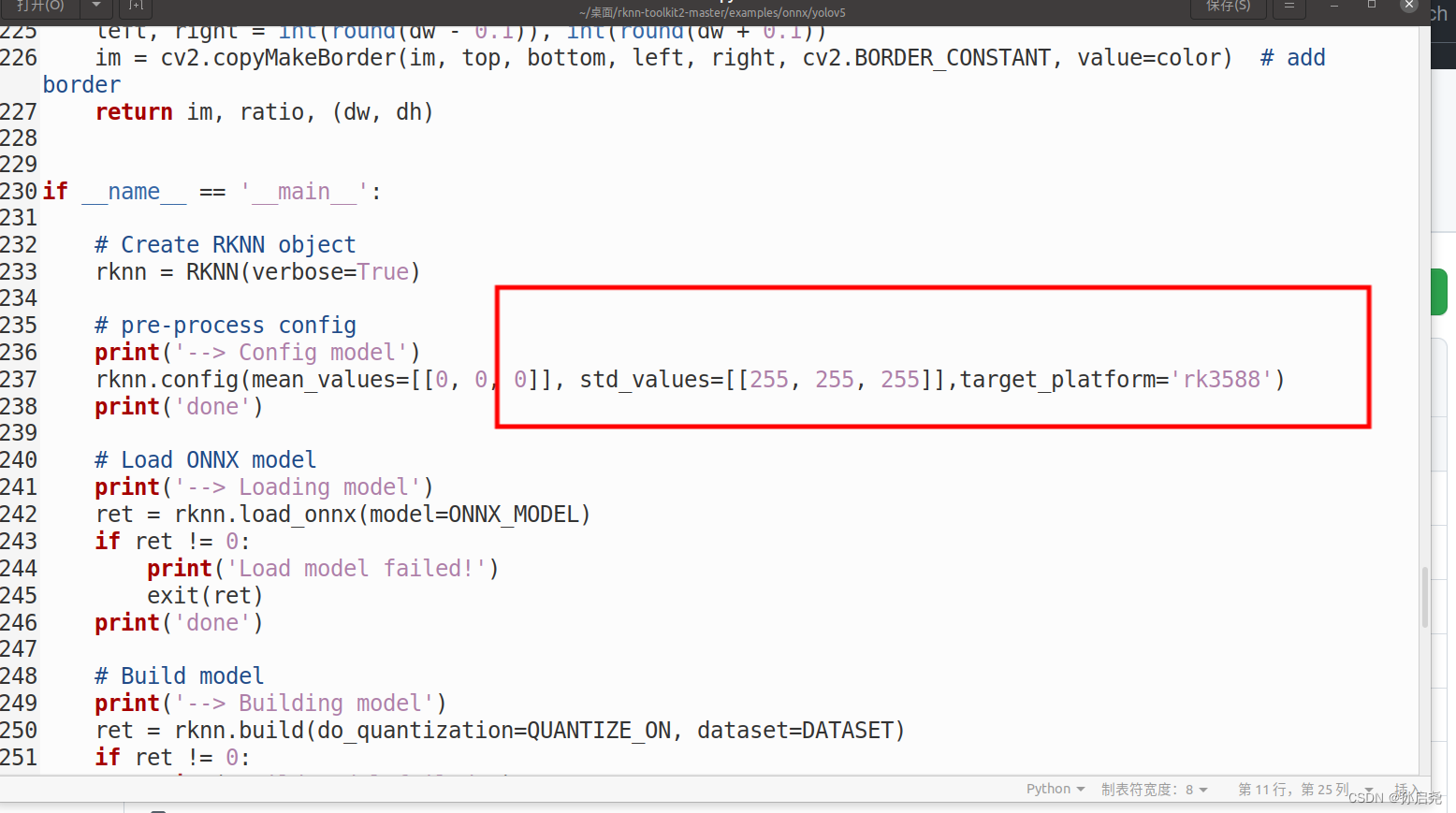
接下来,我们要做的就是修改test.py里面的一些内容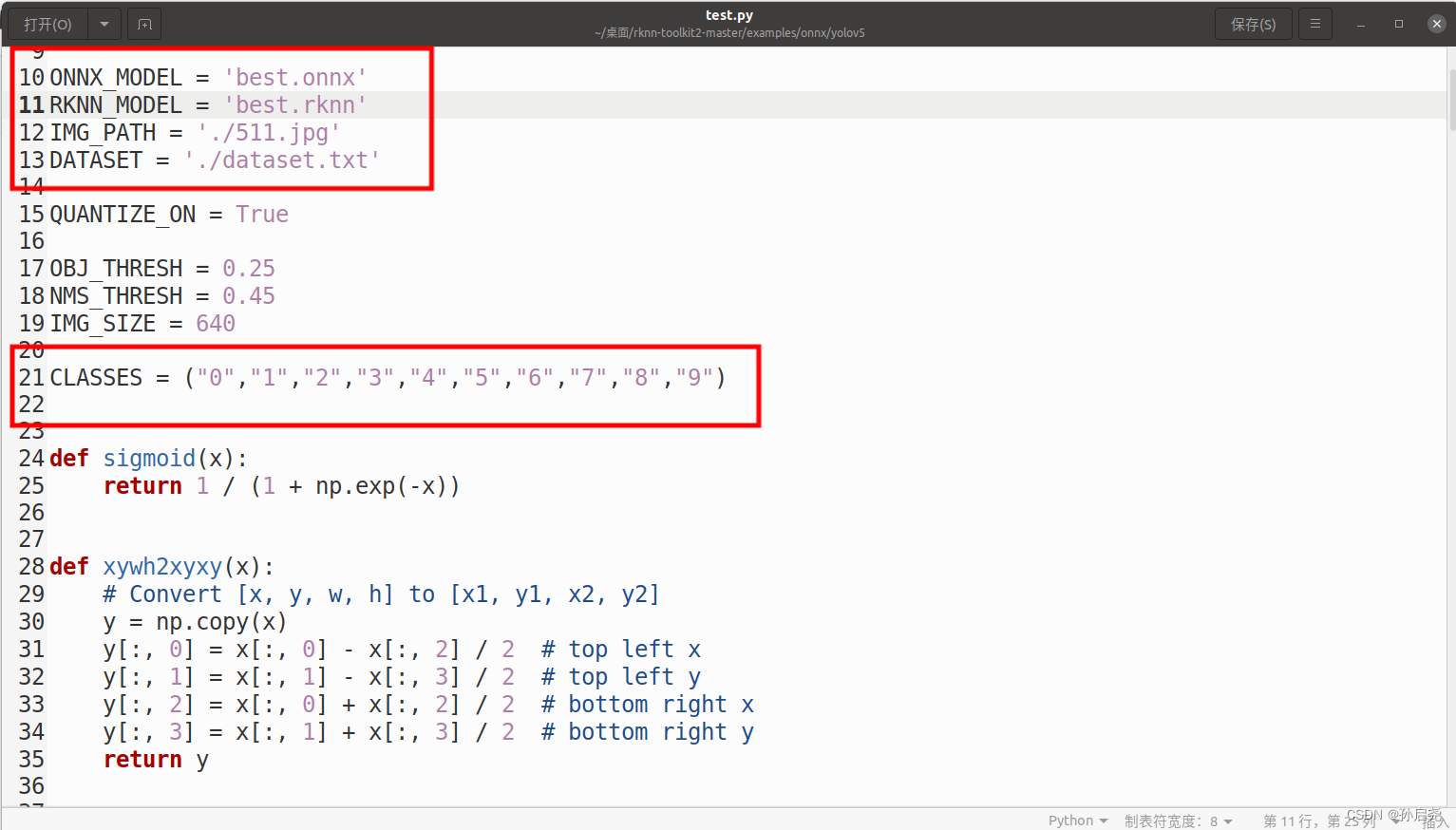
我第一次做的时候,报了错误,当时提示的是没有这个2-1.4.0-22dcfef4版本,我就跑到conda的环境包下,把所有的2-1.4.0-22dcfef4版本改成了2-1.4.0,才解决这个问题。
可是当我这一次在执行这个文件的时候,就没报这个错误,直接就跑起来了。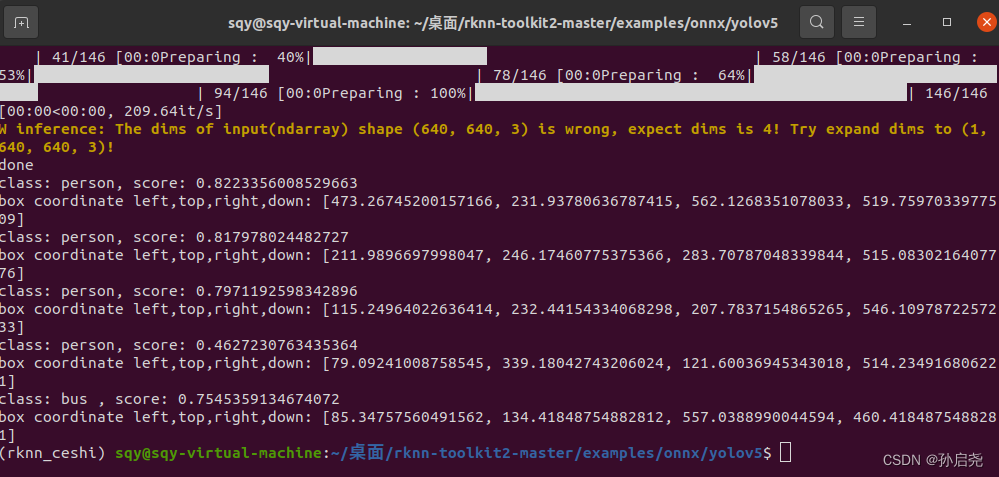
之后在我们的文件夹下出现了best.rknn这样就可以到香橙派5上部署了!!!
四、香橙派5部署rknn实现NPU加速YOLOV5视频推理
这里给大家强调一下,我使用的是RKNN的python版本来实现NPU加速的,这里我们需要到Github上下载RKNN官方教程,下载完成后进入该文件夹,输入指令
cd /examples/onnx/yolov5进入文件夹后,创建一个名为demo.py的文件,将以下代码复制即可,我已经实现了实时视频为了保护隐私,这里我依旧采用官方的yolov5s.rknn模型,而没有用我自己的
import os
import urllib
import traceback
import time
import datetime as dt
import sys
import numpy as np
import cv2
from rknnlite.api import RKNNLiteRKNN_MODEL = 'yolov5s.rknn'
DATASET = './dataset.txt'QUANTIZE_ON = TrueOBJ_THRESH = 0.25
NMS_THRESH = 0.45
IMG_SIZE = 640CLASSES = ("person", "bicycle", "car", "motorbike ", "aeroplane ", "bus ", "train", "truck ", "boat", "traffic light","fire hydrant", "stop sign ", "parking meter", "bench", "bird", "cat", "dog ", "horse ", "sheep", "cow", "elephant","bear", "zebra ", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite","baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife ","spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza ", "donut", "cake", "chair", "sofa","pottedplant", "bed", "diningtable", "toilet ", "tvmonitor", "laptop ", "mouse ", "remote ", "keyboard ", "cell phone", "microwave ","oven ", "toaster", "sink", "refrigerator ", "book", "clock", "vase", "scissors ", "teddy bear ", "hair drier", "toothbrush ")def sigmoid(x):return 1 / (1 + np.exp(-x))def xywh2xyxy(x):# Convert [x, y, w, h] to [x1, y1, x2, y2]y = np.copy(x)y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left xy[:, 1] = x[:, 1] - x[:, 3] / 2 # top left yy[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right xy[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right yreturn ydef process(input, mask, anchors):anchors = [anchors[i] for i in mask]grid_h, grid_w = map(int, input.shape[0:2])box_confidence = sigmoid(input[..., 4])box_confidence = np.expand_dims(box_confidence, axis=-1)box_class_probs = sigmoid(input[..., 5:])box_xy = sigmoid(input[..., :2])*2 - 0.5col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)grid = np.concatenate((col, row), axis=-1)box_xy += gridbox_xy *= int(IMG_SIZE/grid_h)box_wh = pow(sigmoid(input[..., 2:4])*2, 2)box_wh = box_wh * anchorsbox = np.concatenate((box_xy, box_wh), axis=-1)return box, box_confidence, box_class_probsdef filter_boxes(boxes, box_confidences, box_class_probs):"""Filter boxes with box threshold. It's a bit different with origin yolov5 post process!# Argumentsboxes: ndarray, boxes of objects.box_confidences: ndarray, confidences of objects.box_class_probs: ndarray, class_probs of objects.# Returnsboxes: ndarray, filtered boxes.classes: ndarray, classes for boxes.scores: ndarray, scores for boxes."""boxes = boxes.reshape(-1, 4)box_confidences = box_confidences.reshape(-1)box_class_probs = box_class_probs.reshape(-1, box_class_probs.shape[-1])_box_pos = np.where(box_confidences >= OBJ_THRESH)boxes = boxes[_box_pos]box_confidences = box_confidences[_box_pos]box_class_probs = box_class_probs[_box_pos]class_max_score = np.max(box_class_probs, axis=-1)classes = np.argmax(box_class_probs, axis=-1)_class_pos = np.where(class_max_score >= OBJ_THRESH)boxes = boxes[_class_pos]classes = classes[_class_pos]scores = (class_max_score* box_confidences)[_class_pos]return boxes, classes, scoresdef nms_boxes(boxes, scores):"""Suppress non-maximal boxes.# Argumentsboxes: ndarray, boxes of objects.scores: ndarray, scores of objects.# Returnskeep: ndarray, index of effective boxes."""x = boxes[:, 0]y = boxes[:, 1]w = boxes[:, 2] - boxes[:, 0]h = boxes[:, 3] - boxes[:, 1]areas = w * horder = scores.argsort()[::-1]keep = []while order.size > 0:i = order[0]keep.append(i)xx1 = np.maximum(x[i], x[order[1:]])yy1 = np.maximum(y[i], y[order[1:]])xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)inter = w1 * h1ovr = inter / (areas[i] + areas[order[1:]] - inter)inds = np.where(ovr <= NMS_THRESH)[0]order = order[inds + 1]keep = np.array(keep)return keepdef yolov5_post_process(input_data):masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45],[59, 119], [116, 90], [156, 198], [373, 326]]boxes, classes, scores = [], [], []for input, mask in zip(input_data, masks):b, c, s = process(input, mask, anchors)b, c, s = filter_boxes(b, c, s)boxes.append(b)classes.append(c)scores.append(s)boxes = np.concatenate(boxes)boxes = xywh2xyxy(boxes)classes = np.concatenate(classes)scores = np.concatenate(scores)nboxes, nclasses, nscores = [], [], []for c in set(classes):inds = np.where(classes == c)b = boxes[inds]c = classes[inds]s = scores[inds]keep = nms_boxes(b, s)nboxes.append(b[keep])nclasses.append(c[keep])nscores.append(s[keep])if not nclasses and not nscores:return None, None, Noneboxes = np.concatenate(nboxes)classes = np.concatenate(nclasses)scores = np.concatenate(nscores)return boxes, classes, scoresdef draw(image, boxes, scores, classes, fps):"""Draw the boxes on the image.# Argument:image: original image.boxes: ndarray, boxes of objects.classes: ndarray, classes of objects.scores: ndarray, scores of objects.fps: int.all_classes: all classes name."""for box, score, cl in zip(boxes, scores, classes):top, left, right, bottom = boxprint('class: {}, score: {}'.format(CLASSES[cl], score))print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(top, left, right, bottom))top = int(top)left = int(left)right = int(right)bottom = int(bottom)cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 2)cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),(top, left - 6),cv2.FONT_HERSHEY_SIMPLEX,0.6, (0, 0, 255), 2)def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)# ==================================
# 如下为改动部分,主要就是去掉了官方 demo 中的模型转换代码,直接加载 rknn 模型,并将 RKNN 类换成了 rknn_toolkit2_lite 中的 RKNNLite 类
# ==================================rknn = RKNNLite()# load RKNN model
print('--> Load RKNN model')
ret = rknn.load_rknn(RKNN_MODEL)# Init runtime environment
print('--> Init runtime environment')
# use NPU core 0 1 2
ret = rknn.init_runtime(core_mask=RKNNLite.NPU_CORE_0_1_2)
if ret != 0:print('Init runtime environment failed!')exit(ret)
print('done')# Create a VideoCapture object and read from input file
# If the input is the camera, pass 0 instead of the video file name
cap = cv2.VideoCapture(0)# Check if camera opened successfully
if (cap.isOpened()== False): print("Error opening video stream or file")# Read until video is completed
while(cap.isOpened()):start = dt.datetime.utcnow()# Capture frame-by-frameret, img = cap.read()if not ret:breakimg = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)img = cv2.resize(img, (IMG_SIZE, IMG_SIZE))# Inferenceprint('--> Running model')outputs = rknn.inference(inputs=[img])print('done')# post processinput0_data = outputs[0]input1_data = outputs[1]input2_data = outputs[2]input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))input_data = list()input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))boxes, classes, scores = yolov5_post_process(input_data)duration = dt.datetime.utcnow() - startfps = round(10000000 / duration.microseconds)# draw process result and fpsimg_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)cv2.putText(img_1, f'fps: {fps}',(20, 20),cv2.FONT_HERSHEY_SIMPLEX,0.6, (0, 125, 125), 2)if boxes is not None:draw(img_1, boxes, scores, classes, fps)# show outputcv2.imshow("post process result", img_1)# Press Q on keyboard to exitif cv2.waitKey(25) & 0xFF == ord('q'):break# When everything done, release the video capture object
cap.release()# Closes all the frames
cv2.destroyAllWindows()
这里我开启了CPU定频,可是并没有提高多少NPU的使用率,干脆我也不再把代码放上来了,等到以后有时间我再研究一下。
之后在终端中,运行命令
python demo.py效果我放到了B站,感兴趣的小伙伴可以点进去看一下B站视频
相关文章:
香橙派5使用NPU加速yolov5的实时视频推理(二)
三、将best.onnx转为RKNN格式 这一步就需要我们进入到Ubuntu20.04系统中了,我的Ubuntu系统中已经下载好了anaconda,使用anaconda的好处就是可以方便的安装一些库,而且还可以利用conda来配置虚拟环境,做到环境与环境之间相互独立。…...
)
算法练习-二分查找(一)
算法练习-二分查找 1 代码实现 1.1 非递归实现 public int bsearch(int[] a, int n, int value) {int low 0;int high n - 1;while (low < high) {int mid (low high) / 2;if (a[mid] value) {return mid;} else if (a[mid] < value) {low mid 1} else {high …...
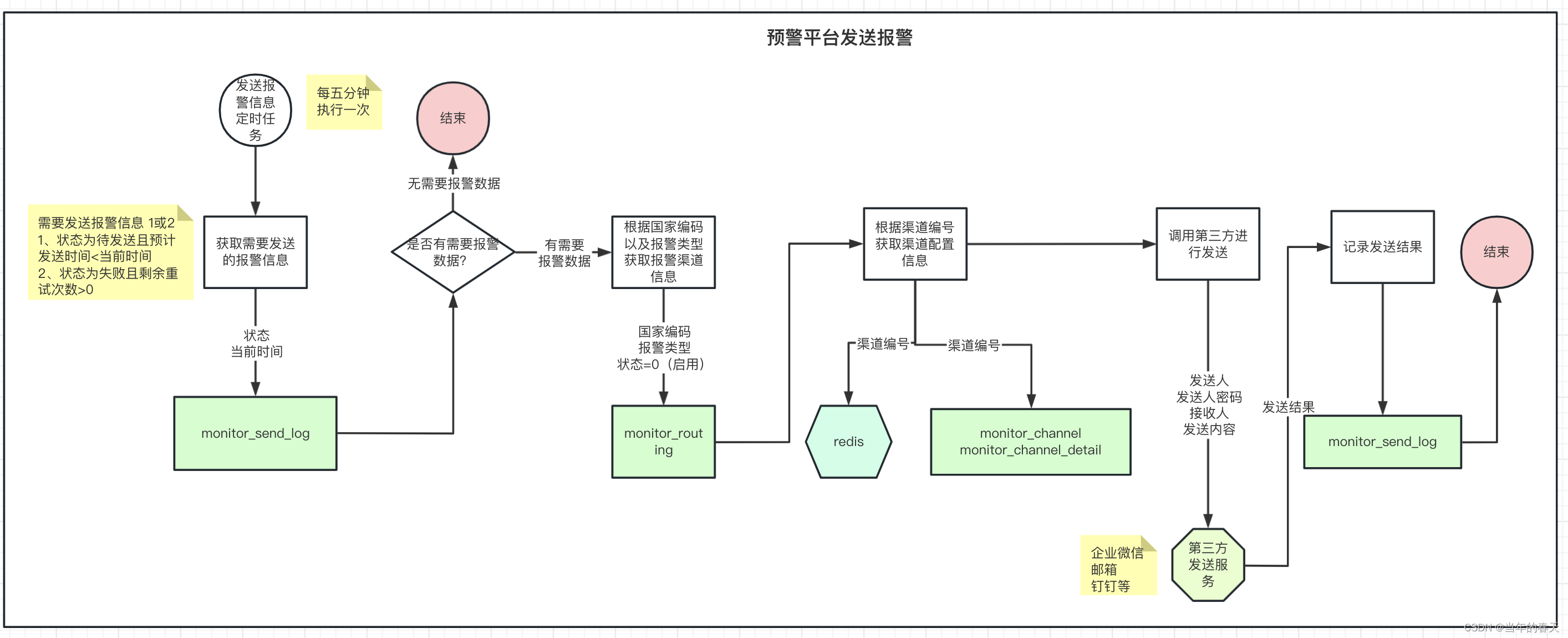
通用业务平台设计(五):预警平台建设
前言 在上家公司,随着业务的不断拓展(从支持单个国家单个主体演变成支持多个国家多个主体),对预警的诉求越来越紧迫;如何保障业务的稳定性那?预警可以帮我们提前甄别风险,从而让我们可以在风险来临前将其消灭ÿ…...

Windows openssl-1.1.1d vs2017编译
工具: 1. perl(https://strawberryperl.com/) 2. nasm(https://nasm.us/) 3. openssl源码(https://www.openssl.org/) 可以自己去下载 或者我的网盘提供下载: 链接:…...
【深蓝学院】手写VIO第2章--IMU传感器--笔记
0. 内容 1. 旋转运动学 角速度的推导: 左ω∧\omega^{\wedge}ω∧,而ω\omegaω是在z轴方向运动,θ′[0,0,1]T\theta^{\prime}[0,0,1]^Tθ′[0,0,1]T 两边取模后得到结论: 线速度大小半径 * 角速度大小 其中,对旋转矩…...
网络基础(二)之HTTP与HTTPS
应用层 再谈 "协议" 协议是一种 "约定". socket api的接口, 在读写数据时, 都是按 "字符串" 的方式来发送接收的. 如果我们要传输一些"结构化的数据" 怎么办呢? 为什么要转换呢? 如果我们将struct message里面的信息…...

Python每日一练(20230306)
目录 1. 翻转二叉树 ★★ 2. 最长公共前缀 ★★ 3. 2的幂 ★ 1. 翻转二叉树 翻转一棵二叉树。 示例 1: 输入: 4/ \2 7/ \ / \ 1 3 6 9 输出: 4/ \7 2/ \ / \ 9 6 3 1示例 2: 输入: 1…...
C/C++每日一练(20230305)
目录 1. 整数分解 ☆ 2. 二叉树的最小深度 ★★ 3. 找x ★★ 1. 整数分解 输入一个正整数,将其按7进制位分解为各乘式的累加和。 示例 1: 输入:49 输出:497^2示例 2: 输入:720 输出:720…...

SAS字典的应用
数据字典中常用信息检索DICTIONARY.COLUMNS、DICTIONARY.TABLES以及DICTIONARY.MEMBERS等字典表的内容。在编程实践中,如何以SAS字典表来提高效率。 1、DICTIONARY.COLUMNS 对于当前SAS任务的全部数据集,表格DICTIONARY.COLUMNS包含了诸如变量的名称、类…...

Mysql中的函数和触发器
函数函数是什么?多用于查询语句,实现了某种功能;用途与存储过程不同,但语法是类似的;函数语法create function 函数名([参数列表]) returns 数据类型 begin DECLARE 变量; sql 语句; return 值; end; 设置函…...
分布式架构之(Zookeeper原理)
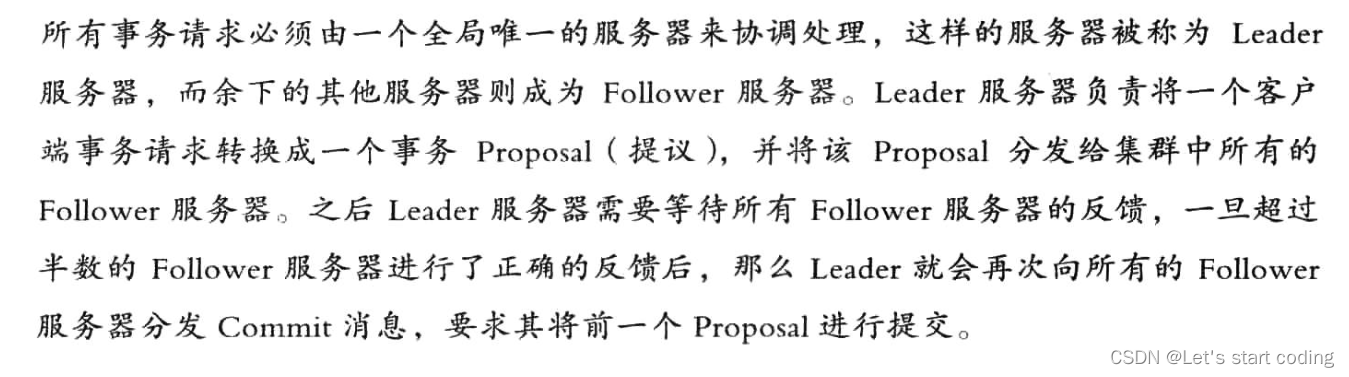
Zookeeper是一个典型的分布式数据一致性的结局方案,分布式应用程序可以基于它实现注入数据发布、订阅、负载均衡、命名服务、分布式协调/通知、集群管理、Master选举、分布式锁和分布式队列等功能, Zookeeper可以保证如下分布式一致性特性: 顺…...

Java框架学习 | MyBatis
问题导向学习MyBatis 为什么要有MyBatis框架? 避免Java开发者直接使用 JDBC重复做数据库操作,同时更便捷地实现想要的数据库相关功能,让Java专注于开发业务。 MyBatis框架如何实现该目的? MyBatis是半自动化持久层ORM框架&#x…...
Cookie+Session详解
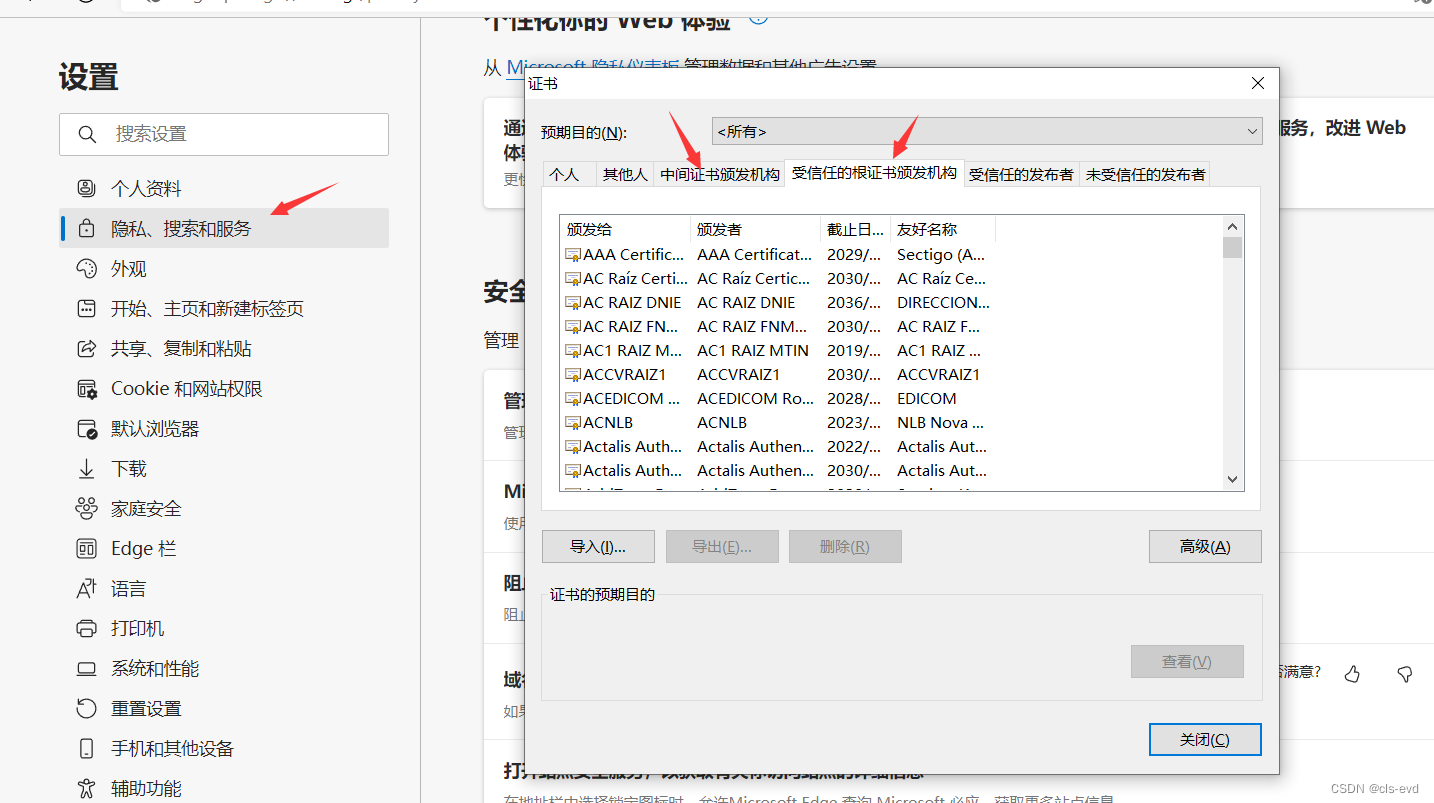
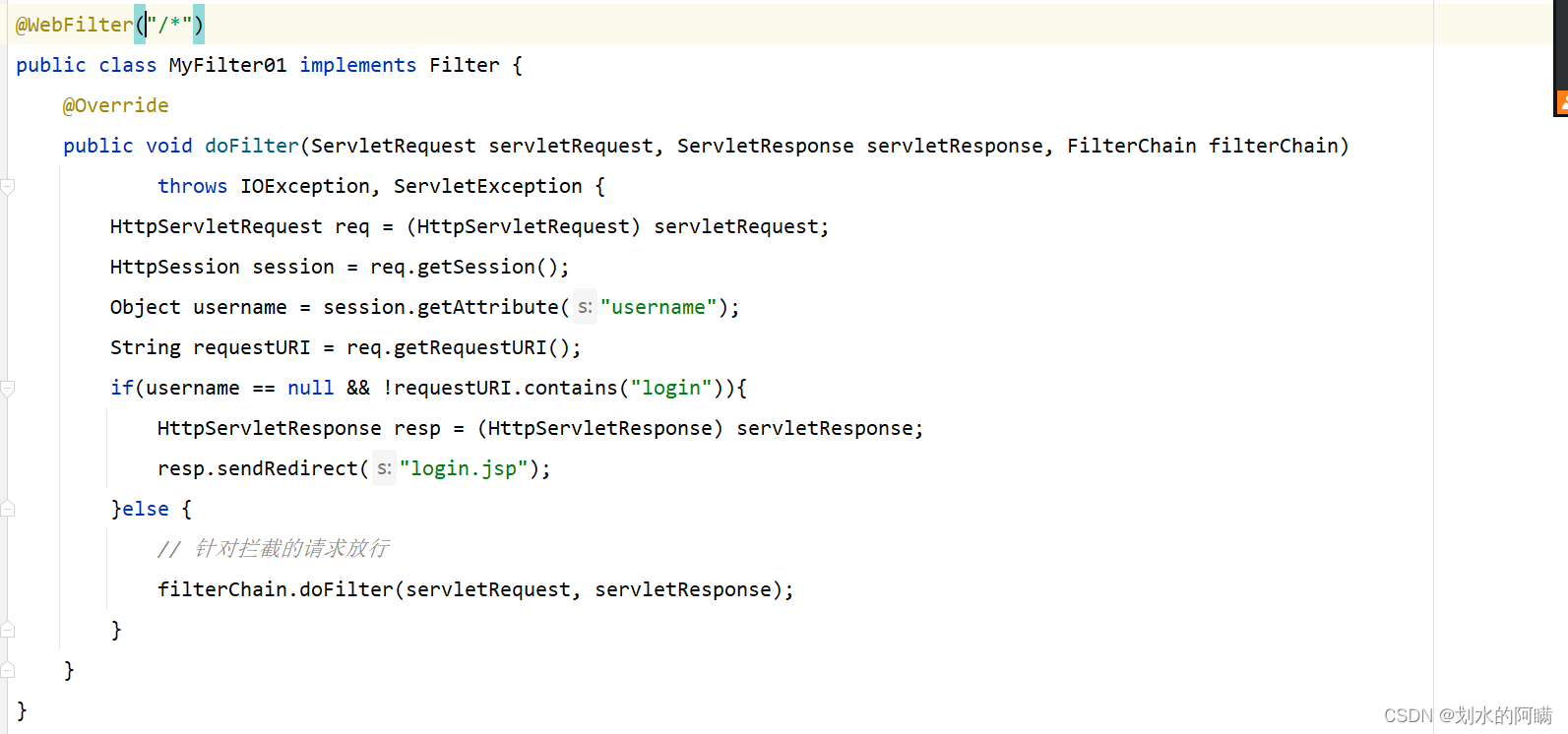
文章目录批量删除会话技术简介CookieCookie 查看Cookie 的删除Cookie 使用页面获取 cookie 信息cookie 特点Sessionsession 的使用Session 登录权限验证过滤器简介过滤器的使用WebFilter 注解过滤放行登录权限验证批量删除 servlet 类 dao 层 会话技术 简介 在计算机领域…...

CAPL脚本要注意区分elcount和strlen求数组长度的区别,不然要吃大亏
🍅 我是蚂蚁小兵,专注于车载诊断领域,尤其擅长于对CANoe工具的使用🍅 寻找组织 ,答疑解惑,摸鱼聊天,博客源码,点击加入👉【相亲相爱一家人】🍅 玩转CANoe&…...

CSS常用选择器
目录 1.CSS是什么 2.CSS的三种写法 2.1内部样式 2.2内联样式 2.3外部样式 3.CSS选择器 3.1标签选择器 3.2类选择器(更好的选择) 3.3ID选择器 3.4后代选择器 3.5子选择器 3.6并集选择器 3.7伪类选择器(复合选择器的特殊用法) 1.CSS是什么 CSS全称Cascding Style Sh…...

Registry与DGC的攻击利用
0x01 2022-02-03写的一篇文章。 0x02 Registry Registry指的是RMI的注册表,攻击的目标是注册表所在的机器,一般注册表和RMI Server在同一个机器上,特殊情况下也会在不同机器上。 在我们通过LocateRegistry#getRegistry获取到目标开启的注…...

赛道持续降温!又一家自动驾驶公司裁员,市值曾超50亿美元
从去年下半年开始,自动驾驶赛道的裁员、倒闭风潮盛行。 本周,美股卡车自动驾驶上市公司Embark Trucks(EMBK)宣布将裁员70%,同时大幅缩减业务。“痛苦可能还没有结束,”公司首席执行官Alex Rodrigues在给员…...

路径规划 | 图解动态A*(D*)算法(附ROS C++/Python/Matlab仿真)
目录0 专栏介绍1 什么是D*算法?2 D*算法核心概念一览3 D*算法流程图4 步步图解:算法实例5 算法仿真与实现5.1 ROS C实现5.2 Python实现0 专栏介绍 🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详…...

GraphCut、最大流最小割定理
G(V,E);V为点集,E为边集; 节点集V中的节点分为: (1)终端节点。不包含图像像素,用S和T表示。S为源点,T为汇点。图像分割中通常用S表示前景目标&a…...

Word文档的密码忘记了怎么办?
Word文档可以设置两种密码,文件的“限制密码”和“打开密码”,今天来分享一下忘记这两种密码可以如何处理。 如果忘记的是Word文档的“限制密码”,文档就无法编辑及更改了,菜单目录中的相关选项也都是灰色状态,无法点…...

163MusicLyrics:一键获取网易云QQ音乐歌词的专业工具
163MusicLyrics:一键获取网易云QQ音乐歌词的专业工具 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为找不到高质量歌词而烦恼吗?163MusicLy…...

IDEA 2018.2.3 下 Maven 依赖包消失?别慌,可能是版本兼容性在作祟
IDEA 2018.2.3 下 Maven 依赖包消失的深度排查指南 当你打开一个尘封已久的老项目,准备继续维护或迁移时,突然发现IDEA的External Libraries里空空如也,只剩下孤零零的JDK包,整个项目文件一片飘红——这种场景对许多维护历史代码库…...

OpenCore Legacy Patcher终极指南:5步让老旧Mac完美运行最新macOS系统
OpenCore Legacy Patcher终极指南:5步让老旧Mac完美运行最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher OpenCore Legacy Patcher是…...

OSINT自动化平台ClawShield:模块化架构与安全运营实战解析
1. 项目概述:一个面向安全运营的公开情报收集与分析平台最近在整理自己的开源项目收藏夹,发现一个挺有意思的仓库,叫SleuthCo/clawshield-public。乍一看这个名字,“ClawShield”,爪子与盾牌,就透着一股子攻…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

Arm Neoverse CMN-700互连架构与协议寄存器配置指南
1. Arm Neoverse CMN-700一致性互连架构解析在现代多核处理器设计中,一致性互连网络如同城市交通系统般重要。Arm Neoverse CMN-700作为第二代Coherent Mesh Network解决方案,其架构设计充分考虑了数据中心和边缘计算的严苛需求。与传统的总线或环形拓扑…...

从SD卡初始化到读写文件:一个完整嵌入式项目中的SDIO驱动避坑实践
从SD卡初始化到读写文件:嵌入式SDIO驱动实战全解析 在嵌入式系统开发中,SD卡因其高容量、低成本和便携性成为数据存储的首选方案。然而,看似简单的SD卡接口背后隐藏着复杂的初始化协议和时序要求。许多工程师在项目初期都会遇到SD卡无法识别、…...

3倍效率提升:Gofile批量下载工具实战指南
3倍效率提升:Gofile批量下载工具实战指南 【免费下载链接】gofile-downloader Download files from https://gofile.io 项目地址: https://gitcode.com/gh_mirrors/go/gofile-downloader 您是否曾为Gofile平台的文件下载效率低下而烦恼?当面对大文…...

GURU-Ai:面向开发者的AI命令行工具集,提升代码理解与运维效率
1. 项目概述:一个面向开发者的AI助手工具集最近在GitHub上看到一个挺有意思的项目,叫“Guru322/GURU-Ai”。光看名字,你可能会觉得这又是一个大而全的AI模型或者聊天机器人,但点进去仔细研究后,我发现它的定位其实非常…...

手机号归属地查询系统:3步构建可视化定位工具
手机号归属地查询系统:3步构建可视化定位工具 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_mirrors/lo/l…...