(3)(3.3) MAVLink高延迟协议
文章目录
前言
1 配置
2 说明
3 消息说明
前言
ArduPilot 支持 MAVLink 高延迟协议(MAVLink High Latency)。该协议专为卫星或 LoRA 等低带宽或高成本链路而设计。
在此协议中,每 5s 只发送一次 HIGH_LATENCY2 MAVLink 信息。对 MAVLink 命令或请求(如命令确认或参数请求)的任何响应也将发送。
MAVLink 高延迟可作为任何遥测端口的选件。典型的使用情况是,一个标准的 MAVLink 遥测端口用于初始配置和系统检查 - 通常是无线电调制解调器或 4G 链路。低带宽调制解调器将连接到第二个遥测端口,用户可激活该端口。
1 配置
确保所需的遥测端口协议设置为 MAVLink 高延迟选项(SERIALn_PROTOCOL = 43)。
在 MAVProxy 中,使用link hl on|off 启用或禁用在高延迟端口上发送遥测数据。
在 QGroundControl 中使用 High Latency选项连接,以启用在高延时端口上发送遥测数据。
在任务规划器中,使用 Actions -> Do Action 启用或禁用高延迟端口上的遥测发送功能。
2 说明
MAVLink 高延迟只会发送有关飞行器位置和状态的非常基本的高级信息。
MAVLink 高延迟对带宽的要求非常低,大多数情况下不到 100 字节/秒。
高延迟链路的启用/禁用可通过任何遥测链路发送,并将启用/禁用飞行器上的所有高延迟链路。
3 消息说明
1. High Latency Protocol
高延时(HL)链路,例如使用铱星网络制造的链路,可提供全球连接,但信息延时很大(> 1 秒),每条信息的成本很高。一般来说,成本和延迟意味着只有在没有更低延迟的替代方案时才会使用高延迟链路,而且只能发送重要信息或命令。
该协议提供了一个类似心跳的信息(HIGH_LATENCY2),用于以较低的速率传输最重要的遥测信息,还提供了一个命令(MAV_CMD_CONTROL_HIGH_LATENCY),用于在需要时(即没有低延迟链路可用时)启用/禁用高延迟链路。
2. HIGH_LATENCY2 ( #235 )
适合铱星等高延迟连接的信息(第 2 版)
| Field Name | Type | Units | Values | Description |
|---|---|---|---|---|
| timestamp | uint32_t | ms | Timestamp (milliseconds since boot or Unix epoch) | |
| type | uint8_t | MAV_TYPE | Type of the MAV (quadrotor, helicopter, etc.) | |
| autopilot | uint8_t | MAV_AUTOPILOT | Autopilot type / class. Use MAV_AUTOPILOT_INVALID for components that are not flight controllers. | |
| custom_mode | uint16_t | A bitfield for use for autopilot-specific flags (2 byte version). | ||
| latitude | int32_t | degE7 | Latitude | |
| longitude | int32_t | degE7 | Longitude | |
| altitude | int16_t | m | Altitude above mean sea level | |
| target_altitude | int16_t | m | Altitude setpoint | |
| heading | uint8_t | deg/2 | Heading | |
| target_heading | uint8_t | deg/2 | Heading setpoint | |
| target_distance | uint16_t | dam | Distance to target waypoint or position | |
| throttle | uint8_t | % | Throttle | |
| airspeed | uint8_t | m/s*5 | Airspeed | |
| airspeed_sp | uint8_t | m/s*5 | Airspeed setpoint | |
| groundspeed | uint8_t | m/s*5 | Groundspeed | |
| windspeed | uint8_t | m/s*5 | Windspeed | |
| wind_heading | uint8_t | deg/2 | Wind heading | |
| eph | uint8_t | dm | Maximum error horizontal position since last message | |
| epv | uint8_t | dm | Maximum error vertical position since last message | |
| temperature_air | int8_t | degC | Air temperature from airspeed sensor | |
| climb_rate | int8_t | dm/s | Maximum climb rate magnitude since last message | |
| battery | int8_t | % | Battery level (-1 if field not provided). | |
| wp_num | uint16_t | Current waypoint number | ||
| failure_flags | uint16_t | HL_FAILURE_FLAG | Bitmap of failure flags. | |
| custom0 | int8_t | Field for custom payload. | ||
| custom1 | int8_t | Field for custom payload. | ||
| custom2 | int8_t | Field for custom payload. |
相关文章:

(3)(3.3) MAVLink高延迟协议
文章目录 前言 1 配置 2 说明 3 消息说明 前言 ArduPilot 支持 MAVLink 高延迟协议(MAVLink High Latency)。该协议专为卫星或 LoRA 等低带宽或高成本链路而设计。 在此协议中,每 5s 只发送一次 HIGH_LATENCY2 MAVLink 信息。对 MAVLink 命令或请求(…...
【异常处理】Vue报错 Component template should contain exactly one root element.
问题描述 启动VUE项目后控制台报错: Component template should contain exactly one root element. If you are using v-if on multiple elements, use v-else-if to chain them instead.翻译为:组件模板应该只包含一个根元素 查看vue代码࿰…...

Eth-trunk隧道
目录 Eth-trunk (划为二层) 二层trunk 三层交换机 网关冗余 Eth-trunk (划为二层) 一,...
【Ubuntu】将多个python文件打包为.so文件
1.为什么要将python打包为.so文件? 保护源码 2.实战例子 a.安装相应的包 pip install cython 验证安装是否成功 cython --version b.实战的文件目录和内容 hi.py # This is a sample Python script.# Press ShiftF10 to execute it or replace it with your…...

FreeRtos自学笔记3-----参考正点原子视频
FreeRtos任务的创建与删除 任务的创建与删除本质上是调用FreeRtos的API函数。 API函数: 1.xTaskGreate():动态创建任务函数; 2.xTaskGreateStatic();静态创建任务函数; 3.xTaskDelete():任务删除 动态创建任务:任务的任务控制块以…...
使用J-Link Commander通过J-LINK以命令的形式来访问ARM通用MCU
通常我们的操作是写好程序然后将程序下载到芯片里面,然后运行程序来进行相应的操作,其实还可以使用 J − L i n k C o m m a n d e r J-Link\quad Commander J−LinkCommander通过 J − L I N K J-LINK J−LINK以命令的形式来简单访问ARM通用MCU…...

19.删除链表的倒数第N个节点
19.删除链表的倒数第N个节点 力扣题目链接(opens new window) 给你一个链表,删除链表的倒数第 n 个结点,并且返回链表的头结点。 进阶:你能尝试使用一趟扫描实现吗? 示例 1: 输入:head [1,2,3,4,5], n…...

【Linux C | 网络编程】广播概念、UDP实现广播的C语言例子
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...
java 面向对象 day3
这里写目录标题 1、 内部类1.1 成员内部类 静态内部类1.2 局部内部类1.3 匿名内部类[重点] 2、枚举2.1 使用枚举类 设计单例模式2.2 小实例 3、泛型3.1 认识泛型3.2 泛型类3.3 泛型接口3.4 泛型方法3.5 注意事项 1、 内部类 内部类 就是定义在一个类中的类 1.1 成员内部类 静…...

Flink 大数据 学习详情
参考视频: 尚硅谷大数据Flink1.17实战教程从入门到精通_哔哩哔哩_bilibili 核心目标: 数据流上的有状态的计算 具体说明: Apache Flink是一个 框架 和 分布式处理引擎,用于对 无界(eg:kafka) 和…...

[项目设计] 从零实现的高并发内存池(四)
🌈 博客个人主页:Chris在Coding 🎥 本文所属专栏:[高并发内存池] ❤️ 前置学习专栏:[Linux学习] ⏰ 我们仍在旅途 目录 6.内存回收 6.1 ThreadCache回收内存 6.2 CentralCache回收内存 Rele…...

02.URL的基本知识和使用
一.认识 URL 1. 为什么要认识 URL ? 虽然是后端给我的一个地址,但是哪部分标记的是服务器电脑,哪部分标记的是资源呢?所以为了和服务器有效沟通我们要认识一下 2. 什么是 URL ? 统一资源定位符,简称网址ÿ…...
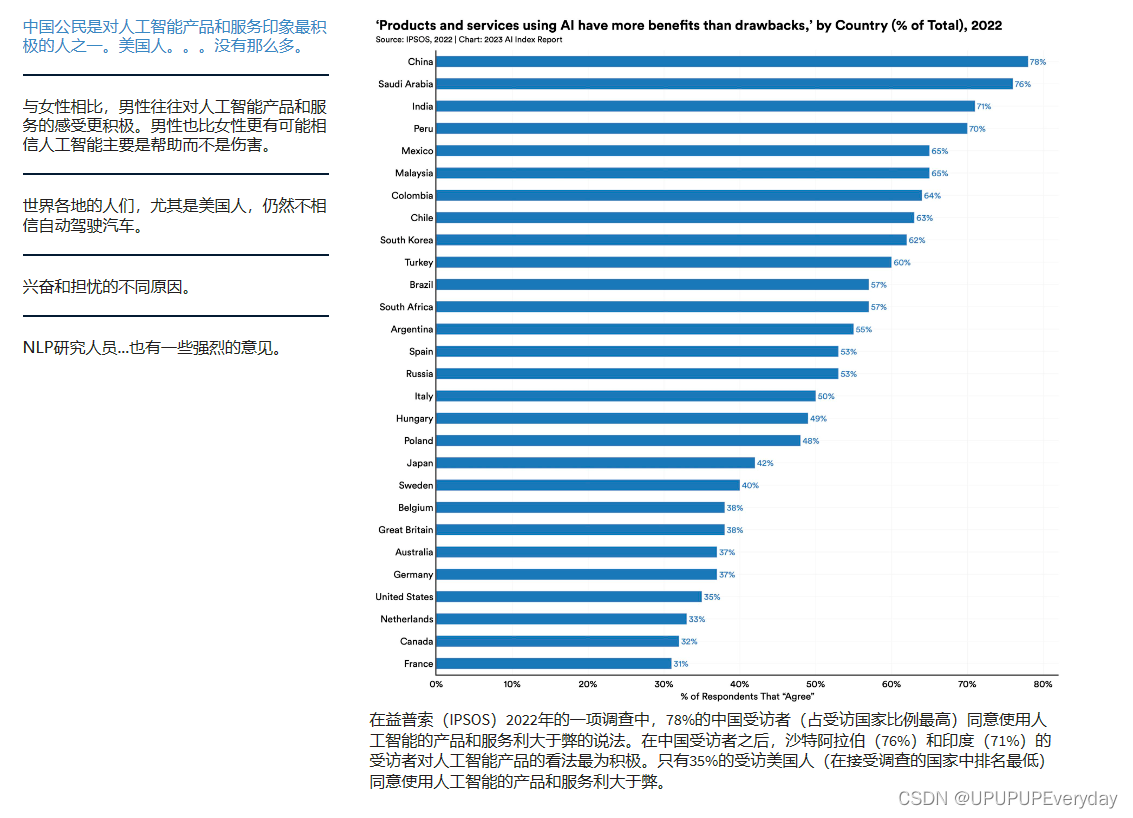
人工智能指数报告2023
人工智能指数报告2023 主要要点第 1 章 研究与开发第 2 章 技术性能第 3 章 人工智能技术伦理第 4 章 经济第 5 章 教育第 6 章 政策与治理第 7 章 多样性第 8 章 舆论 人工智能指数是斯坦福大学以人为本的人工智能研究所(HAI)的一项独立倡议,…...

Android如何对应用进行系统签名
一、使用命令 获取签名文件 从系统源码环境中获取签名相关文件: platform.x509.pem、platform.pk8 、signapk.jar platform.x509.pem、platform.pk8 位于 ../build/target/product/security 目录下。signapk.jar 位于 ../out/host/linux-x86/framework 目录下。 …...

【系统安全加固】Centos 设置禁用密码并打开密钥登录
文章目录 一,概述二,操作步骤1. 服务器端生成密钥2. 在服务器上安装公钥3.下载私钥到本地(重要,否则后面无法登录)4. 修改配置文件,禁用密码并打开密钥登录5. 重启sshd服务6. 配置xshell使用密钥登录 一&am…...

关于我在项目中封装的一些自定义指令
什么是指令 在Vue中提供了一套为数据驱动视图更为方便的操作,这些操作被称为指令系统。我们看到的v-来头的行内属性,都是指令,不同的指令可以完成或者实现不同的功能。 除了核心功能默认内置的指令(v-model和v-show)…...

react经验11:访问循环渲染的子组件内容
前有访问单个子组件的需求,现在进一步需要访问循环渲染中的子组件。 访问单个子组件的成员 实施步骤 子组件//child.tsx export declare type ChildInstance{childMethod:()>void } const Child(props:{value:stringonMounted?:(ref:ChildInstance)>void …...
)
Java开发工程师面试题(业务功能)
一、订单超时未支付自动关闭的几种实现方式。 定时任务扫描:在订单创建时,为订单创建一个定时任务,并设置一个超时时间。后端服务器会定期检查任务的创建时间是否超过了超时时间。如果是,则将订单设置为关闭状态。这种方案需要后…...
BUUCTF-Misc-百里挑一
题目链接:BUUCTF在线评测 (buuoj.cn) 下载附件打开是一个流量包文件: 全是在传图片时候的流量,先把图片保存出来文件–>导出对象–>HTTP–>保存到一个文件夹 然后使用kali下的exiftool找到了一半flag exiftool *|grep flag 另外一半…...

【力扣刷题练习】42. 接雨水
题目描述: 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水。 题目解答: class Solution {public int trap(int[] height) {int n height.length;int ans 0;if (n < 3)return…...
)
手把手教你用ROS小车仿真搞定LIO-SAM建图与NDT定位(附避坑配置)
从零实现ROS仿真环境下的LIO-SAM建图与NDT定位全流程指南 在机器人自主导航领域,激光雷达与惯性测量单元(IMU)的融合建图定位技术已成为工业级应用的主流方案。本文将基于steer_mini_gazebo仿真平台,完整演示如何配置LIO-SAM实时建图系统与Autoware的ND…...

【亲测免费】 DXF轨迹图转G代码工具:高效、精准的数控编程利器
DXF轨迹图转G代码工具:高效、精准的数控编程利器 【下载地址】DXF轨迹图转G代码工具介绍 DXF轨迹图转G代码工具介绍本仓库提供了一个资源文件,用于将DXF格式的轨迹图转换为G代码 项目地址: https://gitcode.com/open-source-toolkit/528cd 项目介…...

2026年热门抠图软件怎么选?好用的抠图工具实测对比指南
抠图需求在生活和工作中越来越常见——无论是制作证件照、电商产品展示,还是社交媒体内容编辑,一款趁手的抠图工具能省去大量时间。但市面上的抠图软件五花八门,功能各不相同,如何找到最适合自己的那一款?本文将从多个…...

AI+STEAM教育方案:基于边缘计算的智能硬件与算法部署实践
1. 项目概述:当AI遇见STEAM,教育如何被重新定义作为一名在教育和科技交叉领域摸爬滚打了十来年的从业者,我亲眼见证了从多媒体教室到在线教育平台,再到如今AI深度介入的整个变迁过程。最近几年,一个词被反复提及&#…...

OBS高级遮罩插件:15种专业遮罩技术的完整技术解析与实战应用
OBS高级遮罩插件:15种专业遮罩技术的完整技术解析与实战应用 【免费下载链接】obs-advanced-masks Advanced Masking Plugin for OBS 项目地址: https://gitcode.com/gh_mirrors/ob/obs-advanced-masks 在视频制作与直播领域,遮罩技术是区分业余与…...

拆解新客裂变与裂变率:诺云用户可直接套用的获客增长指南
在流量红利消退、公域获客成本高企的当下,“新客裂变”早已成为企业降低获客成本、实现指数级增长的核心抓手,而“裂变率”作为衡量裂变效果的核心指标,直接决定了这场获客动作的成败。今天,我们就聚焦“新客裂变”与“裂变率”这…...

软件测试从思维到实战:测试设计黄金法则与黑盒/灰盒/白盒全解析
📌为什么你的测试用例找不到Bug?你是否遇到过这样的场景:辛辛苦苦写了几十个测试用例,执行完发现一切正常,信心满满地发布上线。结果用户一用,马上就发现了严重问题。问题出在哪里?不是你的执行…...
)
「国内直连」Claude Code安装与API配置保姆级教程:从Node.js到调用,小白少踩坑(亲测跑通)
前言 国内用户最头疼的就是海外账号和网络问题,其实找对中转接口就能省不少事。 这篇文章把从Node.js安装到Claude Code启动的全流程整理清楚,用88api做接口中转(国内直连,不用翻墙),尽量让每个步骤都能照…...

TC2526 低功耗原边反馈开关电源芯片
概述 TC2526 是一款低功耗原边反馈(PSR)开关电源芯片,其内部集成了大功率 BJT 管,适用于隔离型的高效低功耗便携式设备充电器应用。TC2526 采用独特具有恒流恒压功能的原边反馈控制技术,以及独特的轻载调频技术降低轻载…...

从‘果冻屏’到‘瀑布屏’:OCA全贴合工艺如何悄悄改变了你的视觉体验?
从‘果冻屏’到‘瀑布屏’:OCA全贴合工艺如何悄悄改变了你的视觉体验? 还记得十年前那些让人抓狂的“果冻屏”吗?阳光下泛着彩虹纹,触控时总感觉隔着一层毛玻璃,甚至能清晰看到屏幕边缘积攒的灰尘。如今拿起任何一款旗…...