【sgPhotoPlayer】自定义组件:图片预览,支持点击放大、缩小、旋转图片

特性:
- 支持设置初始索引值
- 支持显示标题、日期、大小、当前图片位置
- 支持无限循环切换轮播
- 支持鼠标滑轮滚动、左右键、上下键、PageUp、PageDown、Home、End操作切换图片
- 支持Esc关闭窗口
sgPhotoPlayer源码
<template><div :class="$options.name" v-if="visible"><div class="swiper-container"><el-carouselclass="image-swiper"ref="carousel":initial-index="currentIndex":autoplay="false":height="'100%'":indicator-position="swiperItems.length <= 1 ? 'none' : ''":arrow="swiperItems.length <= 1 ? 'never' : ''"@change="(idx) => (currentIndex = idx)"><el-carousel-item v-for="(a, $i) in swiperItems" :key="$i"><el-imagedraggable="false"style="width: 600px; height: 400px":src="a.sm":preview-src-list="swiperItems.map((v) => v.lg)":initial-index="$i":fit="'cover'"></el-image></el-carousel-item></el-carousel><div class="desc"><label class="number">当前位置:{{ currentIndex + 1 }}/{{ swiperItems.length }}</label><labelclass="title":title="`${swiperItems[currentIndex].title}(${swiperItems[currentIndex].size})`">{{ swiperItems[currentIndex].title }}({{ swiperItems[currentIndex].size }})</label><label class="date">{{ swiperItems[currentIndex].date }}</label></div></div><el-tooltip:content="`关闭`":effect="`light`":enterable="false":placement="`top-start`":popper-class="`sg-el-tooltip`":transition="`none`"><el-buttonclass="sg-closeModalBtn"type="primary"icon="el-icon-close"@click="visible = false"circle/></el-tooltip><div class="bg" @click="visible = false"></div></div>
</template><script>
export default {name: "sgPhotoPlayer",data() {return {currentIndex: 0,showBigImg: false,loading: false, //是否加载中visible: false, //是否显示swiperItems: [/* {title:`标题`,date:`时间`,size:`文件大小`,sm: "static/img/sm/1.jpg",//小图路径lg: "static/img/lg/1.jpg",//大图路径}, */],};},props: ["data","value", //是否显示],watch: {value: {handler(d) {this.visible = d;},deep: true,immediate: true,},visible(d) {this.$emit("input", d);},data: {handler(newValue, oldValue) {//console.log('深度监听:', newValue, oldValue);if (newValue && Object.keys(newValue).length) {this.currentIndex = newValue.currentIndex; //默认显示的图片索引this.swiperItems = newValue.photos;}},deep: true, //深度监听immediate: true, //立即执行},},mounted() {this.addEvents();},destroyed() {this.removeEvents();},methods: {addEvents(d) {this.removeEvents();addEventListener("mousewheel", this.mousewheel);addEventListener("keydown", this.keydown);addEventListener("keyup", this.keyup);},removeEvents(d) {removeEventListener("mousewheel", this.mousewheel);removeEventListener("keydown", this.keydown);removeEventListener("keyup", this.keyup);},mousewheel(e) {this.showBigImg = Boolean(document.querySelector(`.el-image-viewer__mask`));if (this.showBigImg) return;if (e.deltaY < 0) return this.$refs.carousel.prev();if (e.deltaY > 0) return this.$refs.carousel.next();},keydown(e) {let key = e.key.toLocaleLowerCase();if (["escape","home","end","pageup","arrowup","arrowleft","pagedown","arrowdown","arrowright",].includes(key)) {e.preventDefault();return false;}},keyup(e) {this.showBigImg = Boolean(document.querySelector(`.el-image-viewer__mask`));let key = e.key.toLocaleLowerCase();if (["escape", "home", "end", "pageup", "arrowup", "pagedown", "arrowdown"].includes(key) &&this.showBigImg)return;switch (key) {case "escape":this.visible = false;break;case "home":this.$refs.carousel.setActiveItem(0);break;case "end":this.$refs.carousel.setActiveItem(this.swiperItems.length - 1);break;case "pageup":case "arrowup":case "arrowleft":this.$refs.carousel.prev();break;case "pagedown":case "arrowdown":case "arrowright":this.$refs.carousel.next();break;}},},
};
</script><style lang="scss" scoped>
.sgPhotoPlayer {position: fixed;left: 0;top: 0;width: 100%;height: 100%;z-index: 2000;display: flex;justify-content: center;align-items: center;.swiper-container {position: absolute;width: 600px;height: 450px;margin: auto;top: 0;left: 0;right: 0;bottom: 0;.image-swiper {width: 100%;height: 100%;overflow: hidden;>>> .el-carousel__container {.el-carousel__arrow,.el-carousel__item {transition: 0.382s !important;}.el-carousel__arrow {// transform: translateY(-40px);}.el-carousel__item {display: flex;justify-content: center;flex-direction: column;}}}.desc {width: 100%;display: flex;justify-content: space-between;align-items: center;flex-wrap: nowrap;box-sizing: border-box;margin: auto;/*文本阴影*/color: white;text-shadow: 1px 1px 1px black;line-height: 1.6;& > * {font-family: "Microsoft YaHei", "DIN-Light";font-weight: normal;font-size: 14px !important;white-space: nowrap;/*单行省略号*/overflow: hidden;white-space: nowrap;text-overflow: ellipsis;}.number {flex-shrink: 0;width: 140px;}.title {box-sizing: border-box;padding: 0 10px;}.date {flex-shrink: 0;width: 140px;}}}.bg {background-color: #000000cc;width: 100%;height: 100%;position: absolute;left: 0;top: 0;z-index: -1;}
}
</style>
应用
// 打开图片openPhoto(d) {this.photoData= {currentIndex: this.photos.findIndex((v) => v.ID == d.ID), //当前图片索引值photos: this.photos.map((v) => ({sm: v.smURL,//小图路径lg: v.lgURL,//大图路径title: this.$g.getFileFullName(v),//标题date: v.GXSJ,//时间size: this.$g.getFileSize(v),//文件大小})),};this.showPhotoPlayer = true;},基于elment-UI的el-carousel和el-image组件el-carousel和el-image组合实现swiper左右滑动图片,点击某张图片放大预览的效果_el-carousel 配合el-image preview-src-list-CSDN博客文章浏览阅读970次。【代码】el-carousel和el-image组合实现swiper左右滑动图片,点击某张图片放大预览的效果。_el-carousel 配合el-image preview-src-listhttps://blog.csdn.net/qq_37860634/article/details/131516077
相关文章:
【sgPhotoPlayer】自定义组件:图片预览,支持点击放大、缩小、旋转图片
特性: 支持设置初始索引值支持显示标题、日期、大小、当前图片位置支持无限循环切换轮播支持鼠标滑轮滚动、左右键、上下键、PageUp、PageDown、Home、End操作切换图片支持Esc关闭窗口 sgPhotoPlayer源码 <template><div :class"$options.name"…...
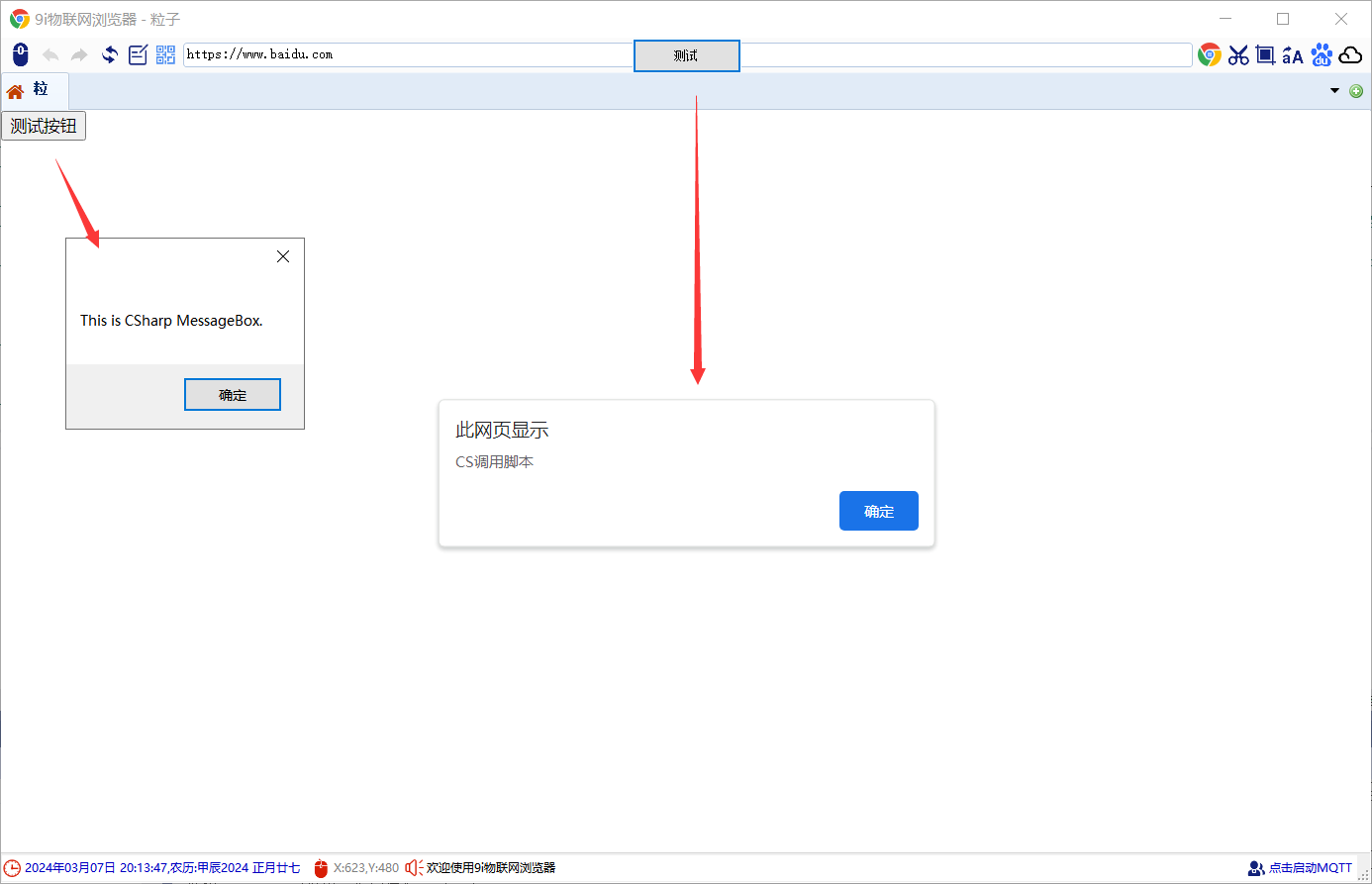
cefsharp(winForm)调用js脚本,js脚本调用c#方法
本博文针对js-csharp交互(相互调用的应用) (一)、js调用c#方法 1.1 类名称:cs_js_obj public class cs_js_obj{//注意,js调用C#,不一定在主线程上调用的,需要用SynchronizationContext来切换到主线程//private System.Threading.SynchronizationContext context;//…...
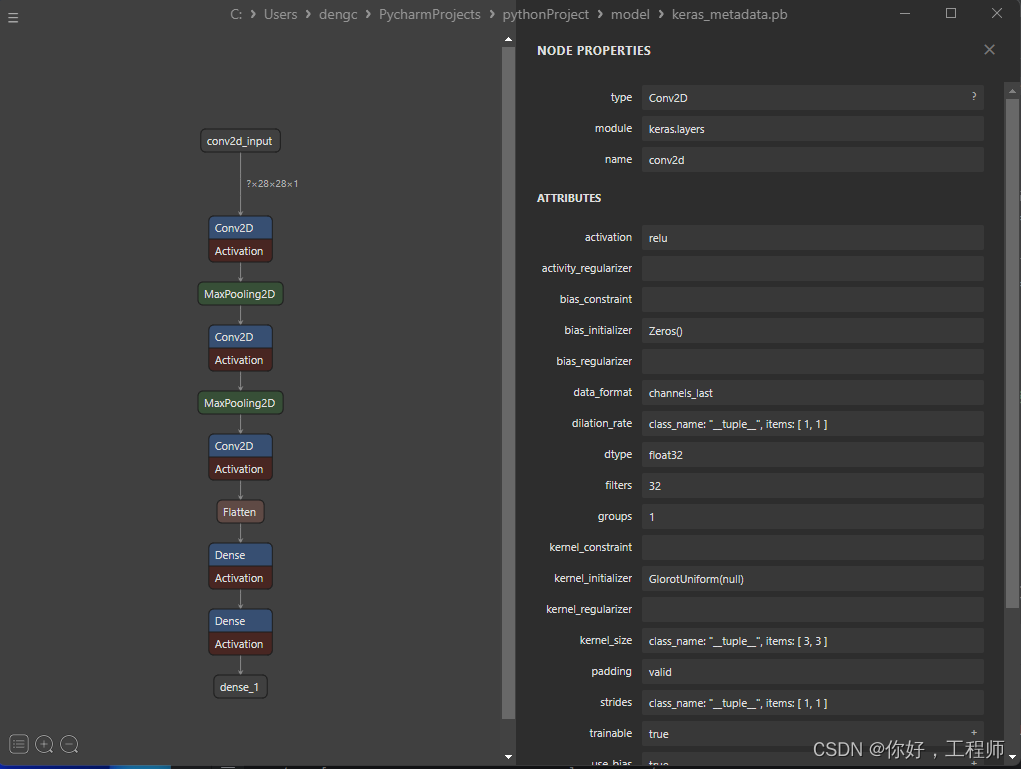
Tensorflow实现手写数字识别
模型架构 具有10个神经元,对应10个类别(0-9的数字)。使用softmax激活函数,对多分类问题进行概率归一化。输出层 (Dense):具有64个神经元。激活函数为ReLU。全连接层 (Dense):将二维数据展平成一维,为全连接层做准备。展…...

谈谈杭州某小公司面试的经历
#面试#本人bg211本,一段实习,前几天面了杭州某小厂公司,直接给我干无语了! 1、先介绍介绍你自己,我说了我的一个情况。 2、没获奖和竞赛经历吗?我说确实没有呢,面试官叹气了一下,只是…...
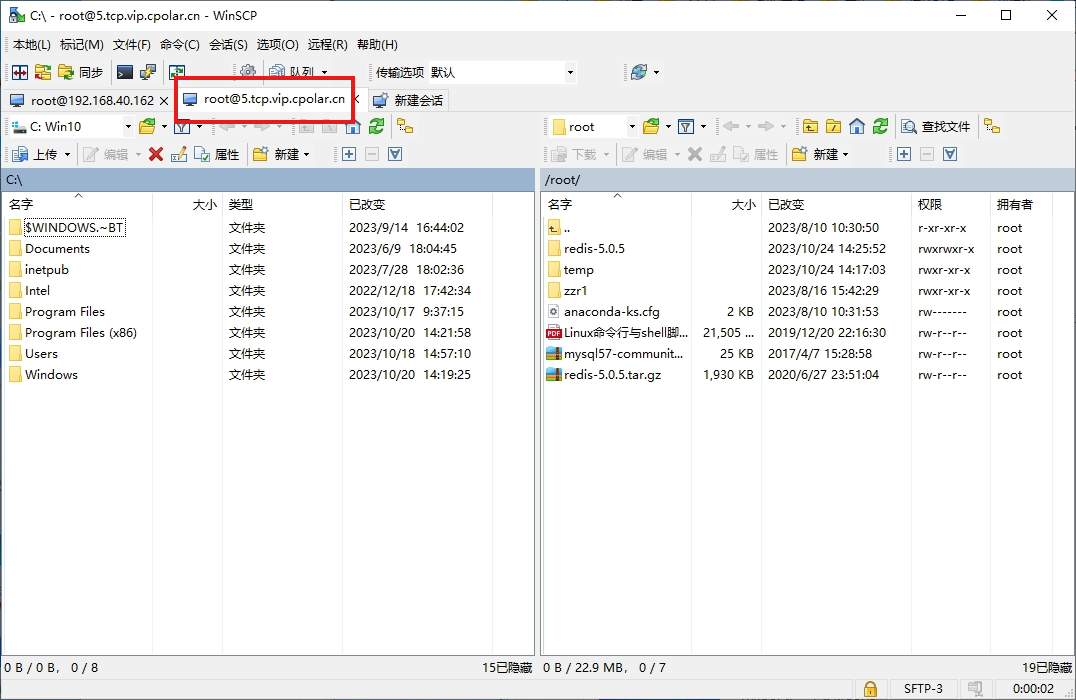
如何使用WinSCP结合Cpolar实现公网远程访问内网Linux服务器
文章目录 1. 简介2. 软件下载安装:3. SSH链接服务器4. WinSCP使用公网TCP地址链接本地服务器5. WinSCP使用固定公网TCP地址访问服务器 1. 简介 Winscp是一个支持SSH(Secure SHell)的可视化SCP(Secure Copy)文件传输软件,它的主要功能是在本地与远程计…...

6. 互质
互质 互质 互质 每次测试的时间限制: 3 秒 每次测试的时间限制:3 秒 每次测试的时间限制:3秒 每次测试的内存限制: 256 兆字节 每次测试的内存限制:256 兆字节 每次测试的内存限制:256兆字节 题目描述 给定…...
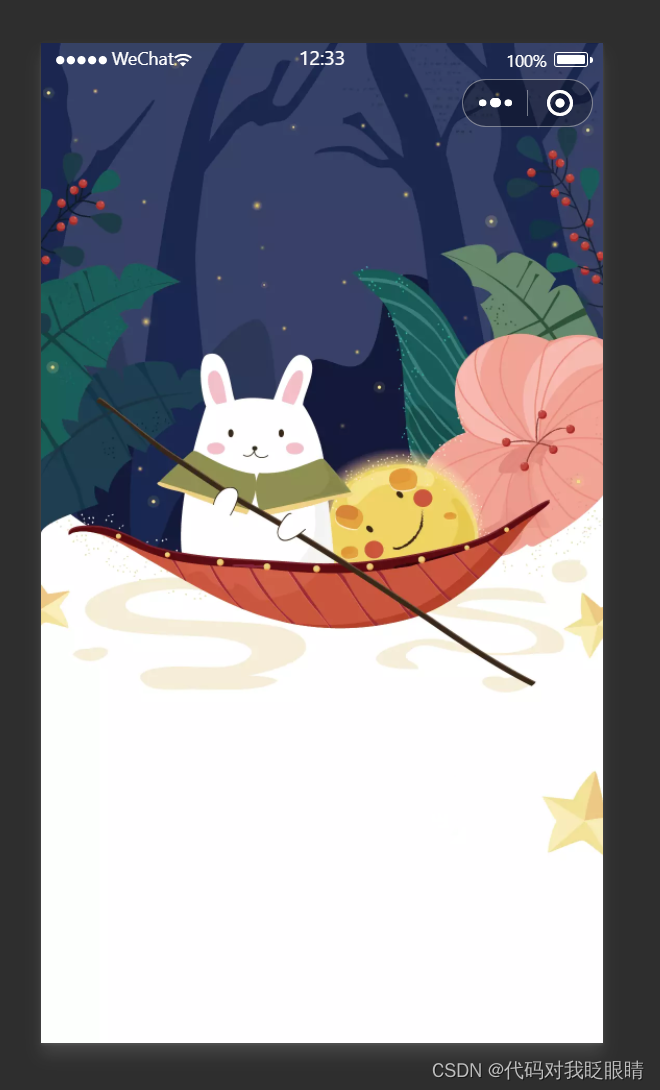
微信小程序(五十一)页面背景(全屏)
注释很详细,直接上代码 上一篇 新增内容: 1.页面背景的基本写法 2.去除默认上标题实习全屏背景 3. 背景适配细节 源码: index.wxss page{/* 背景链接 */background-image: url(https://pic3.zhimg.com/v2-a76bafdecdacebcc89b5d4f351a53e6a_…...
MATLAB | MATLAB版玫瑰祝伟大女性节日快乐!!
妇女节到了,这里祝全体伟大的女性,节日快乐,事业有成,万事胜意。 作为MATLAB爱好者,这里还是老传统画朵花叭,不过感觉大部分样式的花都画过了,这里将一段很古老的2012年的html玫瑰花代码转成MA…...
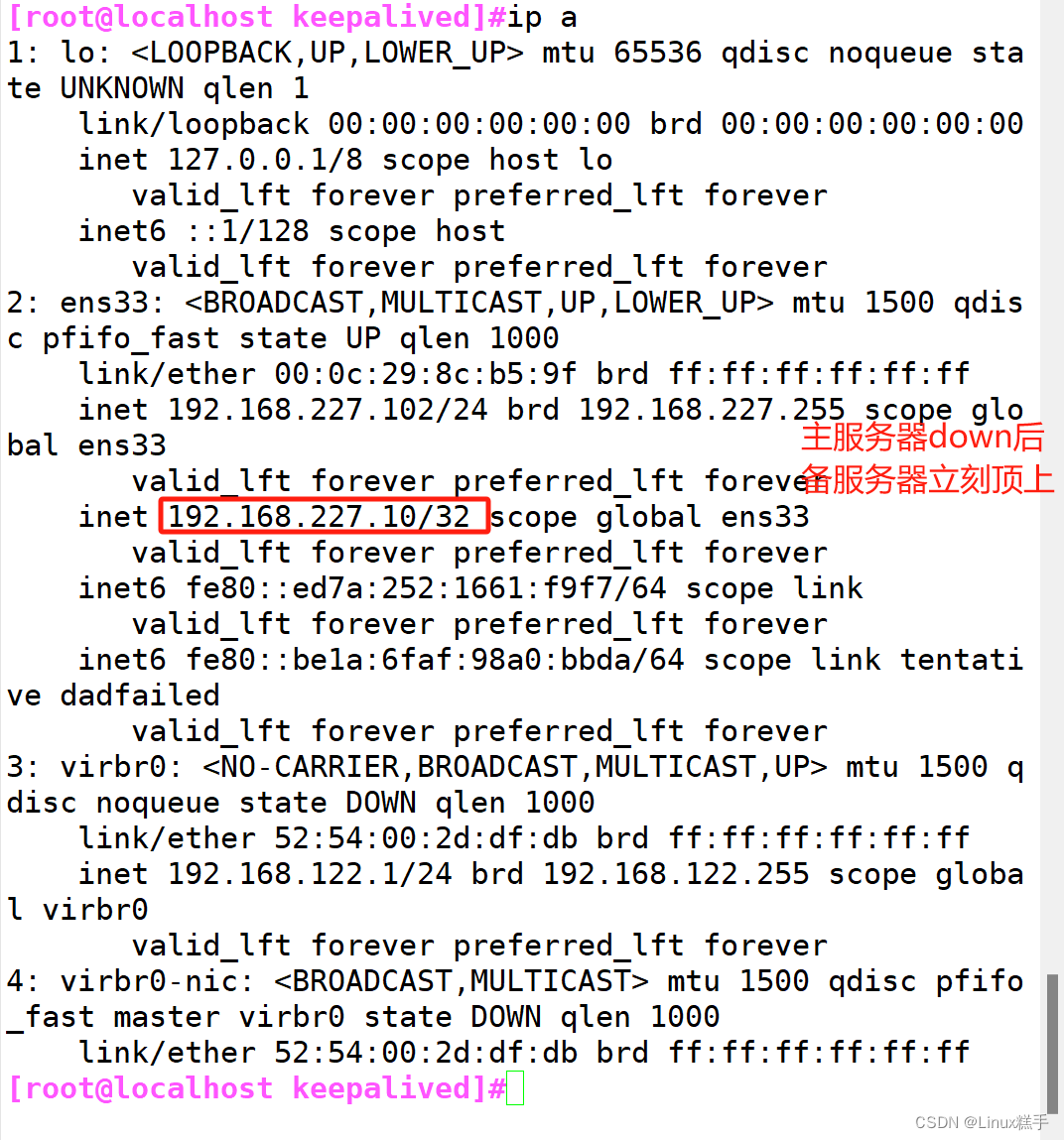
LVS+Keepalived 高可用集群
目录 一.Keepalived工具介绍 1.用户空间核心组件: (1)vrrp stack:VIP消息通告 (2)checkers:监测real server(简单来说 就是监控后端真实服务器的服务) (…...

Linux:kubernetes(k8s)探针ReadinessProbe的使用(9)
本章yaml文件是根据之前文章迭代修改过来的 先将之前的pod删除,然后使用下面这个yaml进行生成pod apiVersion: v1 # api文档版本 kind: Pod # 资源对象类型 metadata: # pod相关的元数据,用于描述pod的数据name: nginx-po # pod名称labels: # pod的标…...
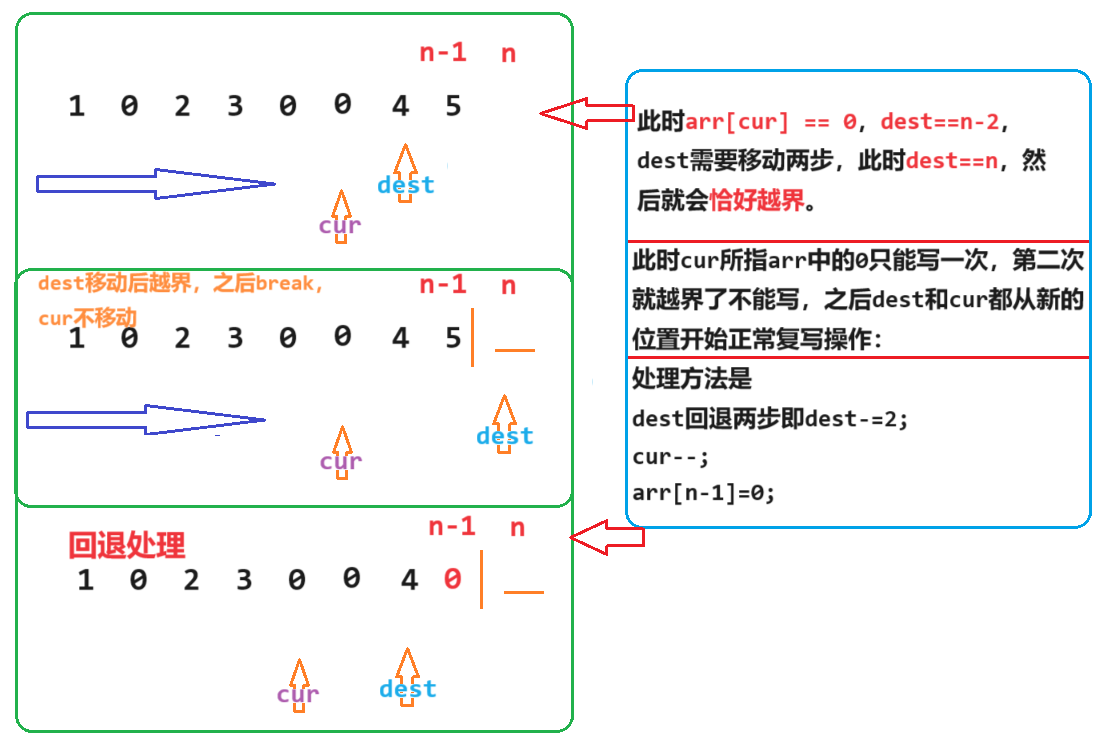
专题一 - 双指针 - leetcode 1089. 复写零 - 简单难度
leetcode 1089. 复写零 leetcode 1089. 复写零 | 简单难度1. 题目详情1. 原题链接2. 基础框架 2. 解题思路1. 题目分析2. 算法原理3. 时间复杂度 3. 代码实现4. 知识与收获 leetcode 1089. 复写零 | 简单难度 1. 题目详情 给你一个长度固定的整数数组 arr ,请你将…...
深入浅出(二)MVVM
MVVM 1. 简介2. 示例 1. 简介 2. 示例 示例下载地址:https://download.csdn.net/download/qq_43572400/88925141 创建C# WPF应用(.NET Framework)工程,WpfApp1 添加程序集 GalaSoft.MvvmLight 创建ViewModel文件夹,并创建MainWindowV…...
A题思路)
2023年第三届中国高校大数据挑战赛(第二场)A题思路
竞赛时间 (1)报名时间:即日起至2024年3月8日 (2)比赛时间:2024年3月9日8:00至2024年3月12日20:00 (3)成绩公布:2024年4月30日前 赛题方向:大数据统计分析 …...

数据挖掘:
一.数据仓库概述: 1.1数据仓库概述 1.1.1数据仓库定义 数据仓库是一个用于支持管理决策的、面向主题、集成、相对稳定且反映历史变化的数据集合。 1.1.2数据仓库四大特征 集成性(Integration): 数据仓库集成了来自多个不同来源…...
NDK,Jni
使用 NDK(Native Development Kit)意味着在 Android 应用程序中集成 C/C 代码。通常情况下,Android 应用程序主要使用 Java 或 Kotlin 编写,但有时候需要使用 C/C 来实现一些特定的功能或性能优化。 NDK 提供了一组工具和库&…...

Java实战:Spring Boot整合Canal与RabbitMQ实时监听数据库变更并高效处理
引言 在现代微服务架构中,数据的变化往往需要及时地传播给各个相关服务,以便于同步更新状态或触发业务逻辑。Canal作为一个开源的MySQL binlog订阅和消费组件,能够帮助我们实时捕获数据库的增删改操作。而RabbitMQ作为一款消息中间件&#x…...

机器学习:探索计算机的自我进化之路
当我们谈论机器学习时,我们在谈论什么呢?机器学习是一门跨学科的学科,它使用计算机模拟或实现人类学习行为,通过不断地获取新的知识和技能,重新组织已有的知识结构,从而提高自身的性能。简单来说࿰…...
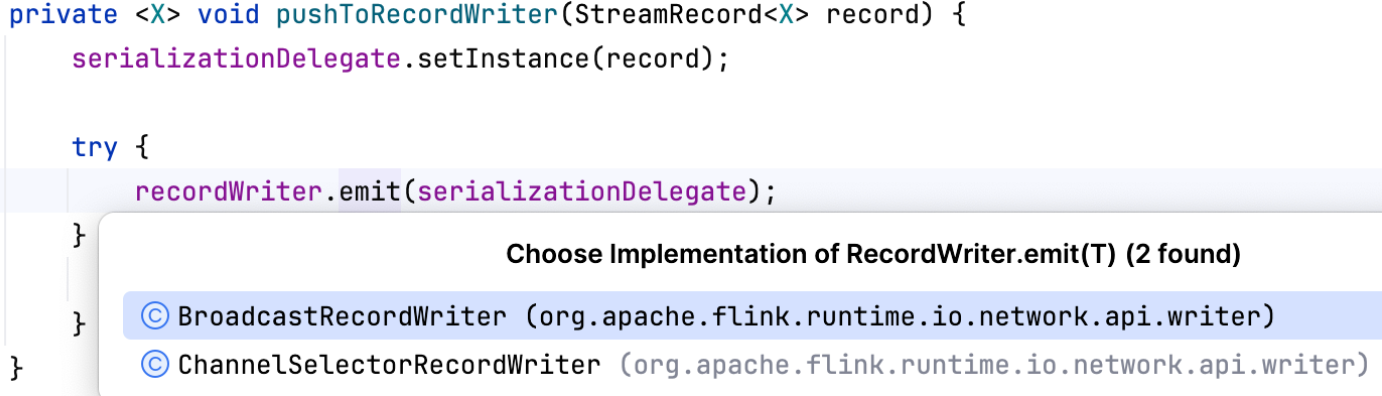
【Flink网络数据传输(4)】RecordWriter(下)封装数据并发送到网络的过程
文章目录 一. RecordWriter封装数据并发送到网络1. 数据发送到网络的具体流程2. 源码层面2.1. Serializer的实现逻辑a. SpanningRecordSerializer的实现b. SpanningRecordSerializer中如何对数据元素进行序列化 2.2. 将ByteBuffer中间数据写入BufferBuilder 二. BufferBuilder申…...

【牛客】VL74 异步复位同步释放
描述 题目描述: 请使用异步复位同步释放来将输入数据a存储到寄存器中,并画图说明异步复位同步释放的机制原理 信号示意图: clk为时钟 rst_n为低电平复位 d信号输入 dout信号输出 波形示意图: 输入描述: clk为时…...

CSS3笔记
1.相同优先级的样式以写在后面的为主。 2.交集选择器,并且 条件挨在一起 p.rich{...} /*p元素class有rich的元素*/ 3.并集选择器,或者 逗号隔开 .class1,class2{...}/*满足其中一个类名都会使用该样式*/ 4.后代选择器 空格 隔开 所有符合的包括孙子及…...

ENVI实战:利用传感器波谱响应函数实现光谱曲线精准重采样
1. 为什么需要光谱重采样? 在遥感数据分析中,我们经常会遇到一个头疼的问题:不同传感器采集的光谱数据分辨率不一致。比如实验室用光谱仪测量的叶片反射率可能有上千个波段,而Landsat-8卫星只能获取11个波段的数据。这就好比用高清…...

AI专著生成新玩法!掌握这些工具,快速产出高质量专业专著
学术专著写作挑战与 AI 辅助工具介绍 学术专著的根本价值在于其内容的系统性与内部逻辑的完整性,但这往往是写作中的一个重大挑战。相较于期刊论文专注于某个特定问题,学术专著必须构建一个包括绪论、理论框架、核心研究、应用拓展,以及结论…...

基于CIEDE2000标准的AI图像分层技术:从像素聚类到设计效率革命
基于CIEDE2000标准的AI图像分层技术:从像素聚类到设计效率革命 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 在数字设计领域,将…...

Qwen3-14B私有部署商业应用:替代SaaS服务降本提效的真实测算
Qwen3-14B私有部署商业应用:替代SaaS服务降本提效的真实测算 1. 私有部署的商业价值 在当今企业数字化转型浪潮中,大语言模型的应用已经成为提升效率的关键工具。然而,依赖第三方SaaS服务不仅成本高昂,还存在数据安全和响应速度…...

基于凌科芯安加密芯片智能门锁解决方案
随着物联网产业的快速发展,智能网络设备对信息安全的需求与依赖日益增强。在万物互联的背景下,电子锁作为典型的安全防范产品,在重点场所安防与居民居家安全保障中发挥着关键作用。其中,智能门锁凭借密码、指纹、人脸识别、手机远…...

PlugY终极指南:暗黑破坏神2单机模式完全解放方案
PlugY终极指南:暗黑破坏神2单机模式完全解放方案 【免费下载链接】PlugY PlugY, The Survival Kit - Plug-in for Diablo II Lord of Destruction 项目地址: https://gitcode.com/gh_mirrors/pl/PlugY 还在为暗黑破坏神2单机模式的储物箱空间不足而烦恼吗&am…...

为Qwen-VL“点亮”视觉思维:从注意力热力图洞察多模态对齐的深层逻辑
1. 理解Qwen-VL的视觉思维机制 当你第一次看到Qwen-VL这类视觉语言模型时,可能会好奇它究竟是如何"看"图片的。想象一下,你正在教一个小朋友看图说话:小朋友会先扫视整张图片,然后目光停留在某些关键区域,最…...

解决SlowFast环境配置中的‘No module named torch._six’等疑难杂症:从修改压缩包到调整import路径
SlowFast环境配置深度排障指南:从源码修改到路径调整的完整解决方案 在视频理解领域,SlowFast作为Facebook Research开源的优秀框架,凭借其双路径网络设计在动作识别任务中表现出色。然而,许多开发者在环境配置阶段就会遭遇各种&q…...

2026免费降AI神器测评:20款国内外工具亲测,哪个真能过检测?
现在写论文,AIGC检测几乎是躲不过的坎。学校用的知网、Turnitin这些系统一直在迭代升级,现在不仅要看重复率,AIGC率也成了硬性考核指标。 熬了好几天改出来的稿子,一查AIGC率居然有90%,换谁心态都得崩,现在…...
化适配实战:从零实现「点击按钮退出应用」插件)
Flutter 鸿蒙(OpenHarmony)化适配实战:从零实现「点击按钮退出应用」插件
一、引言 随着鸿蒙生态的持续发展,Flutter 作为跨平台开发的主流框架,对鸿蒙系统的支持也越来越完善。很多 Flutter 开发者在迁移鸿蒙应用时,都会遇到「应用退出」的基础需求:点击按钮直接关闭应用,回到系统桌面。 本…...