C# OpenCvSharp DNN FreeYOLO 密集行人检测
目录
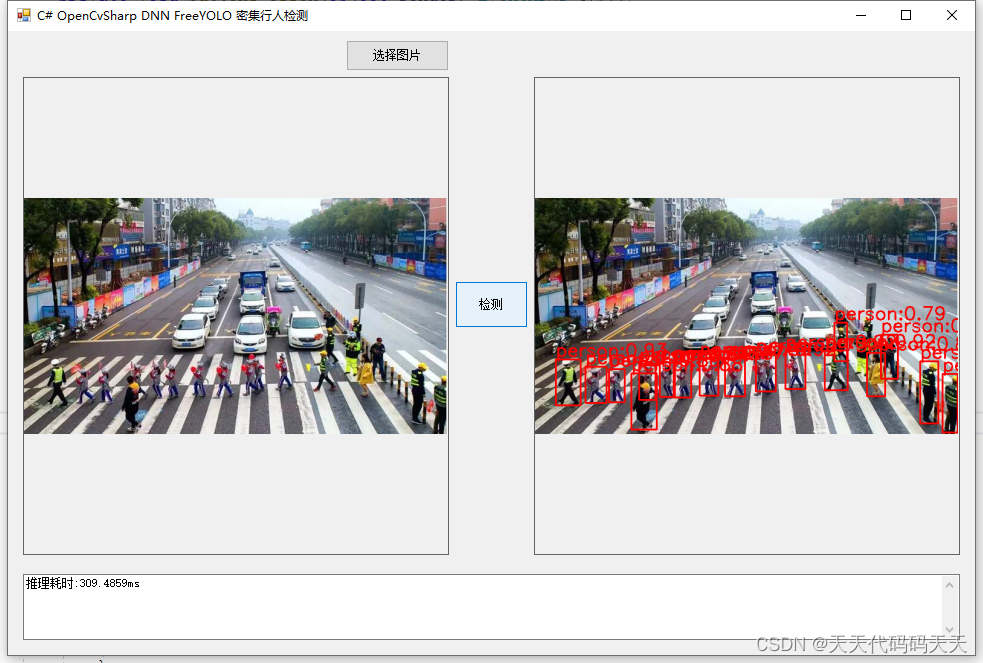
效果
模型信息
项目
代码
下载
C# OpenCvSharp DNN FreeYOLO 密集行人检测
效果
模型信息
Inputs
-------------------------
name:input
tensor:Float[1, 3, 192, 320]
---------------------------------------------------------------
Outputs
-------------------------
name:output
tensor:Float[1, 1260, 6]
---------------------------------------------------------------
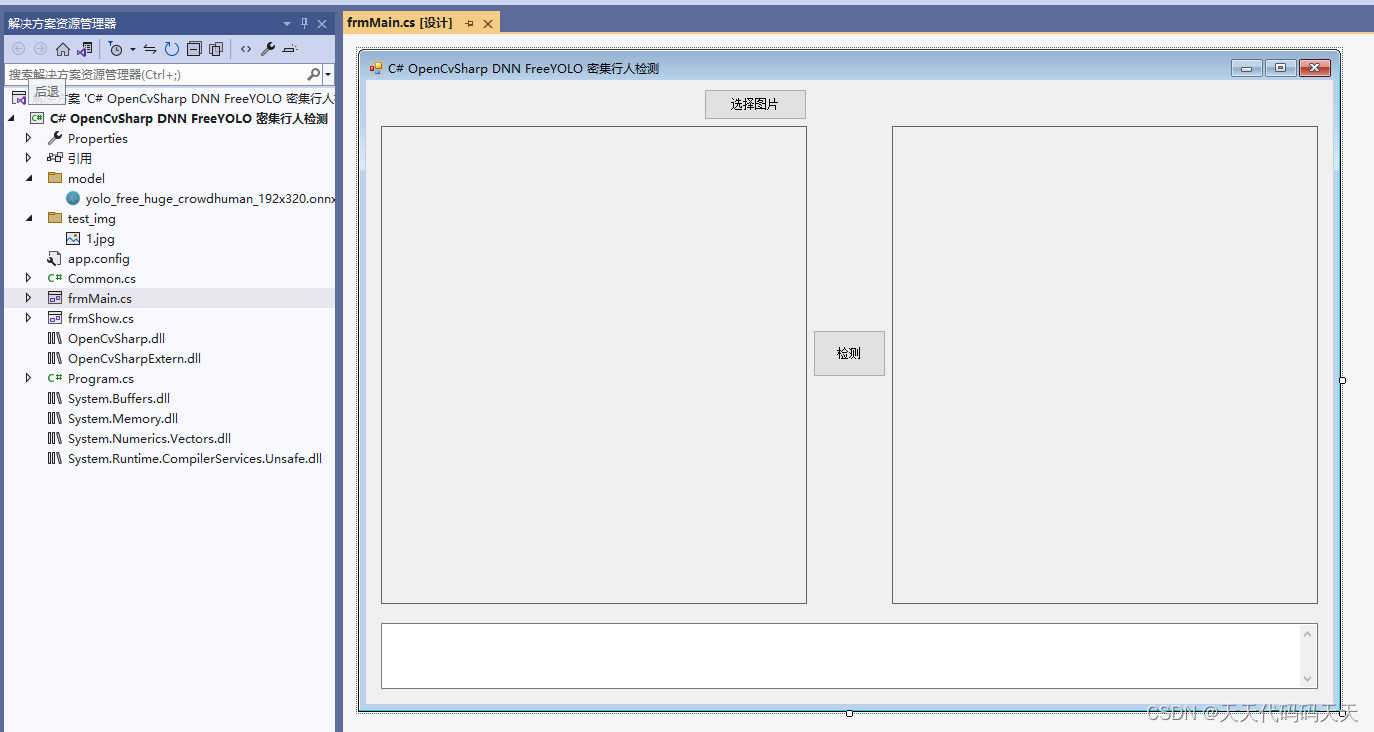
项目
代码
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Windows.Forms;namespace OpenCvSharp_DNN_Demo
{public partial class frmMain : Form{public frmMain(){InitializeComponent();}string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";string image_path = "";DateTime dt1 = DateTime.Now;DateTime dt2 = DateTime.Now;float confThreshold;float nmsThreshold;int num_stride = 3;float[] strides = new float[3] { 8.0f, 16.0f, 32.0f };string modelpath;int inpHeight;int inpWidth;List<string> class_names;int num_class;Net opencv_net;Mat BN_image;Mat image;Mat result_image;private void button1_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = fileFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox1.Image = null;pictureBox2.Image = null;textBox1.Text = "";image_path = ofd.FileName;pictureBox1.Image = new Bitmap(image_path);image = new Mat(image_path);}private void Form1_Load(object sender, EventArgs e){confThreshold = 0.6f;nmsThreshold = 0.5f;modelpath = "model/yolo_free_huge_crowdhuman_192x320.onnx";inpHeight = 192;inpWidth = 320;opencv_net = CvDnn.ReadNetFromOnnx(modelpath);class_names = new List<string>();class_names.Add("person");num_class = 1;image_path = "test_img/1.jpg";pictureBox1.Image = new Bitmap(image_path);}private unsafe void button2_Click(object sender, EventArgs e){if (image_path == ""){return;}textBox1.Text = "检测中,请稍等……";pictureBox2.Image = null;Application.DoEvents();image = new Mat(image_path);float ratio = Math.Min(1.0f * inpHeight / image.Rows, 1.0f * inpWidth / image.Cols);int neww = (int)(image.Cols * ratio);int newh = (int)(image.Rows * ratio);Mat dstimg = new Mat();Cv2.Resize(image, dstimg, new OpenCvSharp.Size(neww, newh));Cv2.CopyMakeBorder(dstimg, dstimg, 0, inpHeight - newh, 0, inpWidth - neww, BorderTypes.Constant);BN_image = CvDnn.BlobFromImage(dstimg);//配置图片输入数据opencv_net.SetInput(BN_image);//模型推理,读取推理结果Mat[] outs = new Mat[1] { new Mat() };string[] outBlobNames = opencv_net.GetUnconnectedOutLayersNames().ToArray();dt1 = DateTime.Now;opencv_net.Forward(outs, outBlobNames);dt2 = DateTime.Now;int num_proposal = outs[0].Size(1);int nout = outs[0].Size(2);float* pdata = (float*)outs[0].Data;List<float> confidences = new List<float>();List<Rect> boxes = new List<Rect>();List<int> classIds = new List<int>();for (int n = 0; n < num_stride; n++){int num_grid_x = (int)Math.Ceiling(inpWidth / strides[n]);int num_grid_y = (int)Math.Ceiling(inpHeight / strides[n]);for (int i = 0; i < num_grid_y; i++){for (int j = 0; j < num_grid_x; j++){float box_score = pdata[4];int max_ind = 0;float max_class_socre = 0;for (int k = 0; k < num_class; k++){if (pdata[k + 5] > max_class_socre){max_class_socre = pdata[k + 5];max_ind = k;}}max_class_socre = max_class_socre* box_score;max_class_socre = (float)Math.Sqrt(max_class_socre);if (max_class_socre > confThreshold){float cx = (0.5f + j + pdata[0]) * strides[n]; //cxfloat cy = (0.5f + i + pdata[1]) * strides[n]; //cyfloat w = (float)(Math.Exp(pdata[2]) * strides[n]); //wfloat h = (float)(Math.Exp(pdata[3]) * strides[n]); //hfloat xmin = (float)((cx - 0.5 * w) / ratio);float ymin = (float)((cy - 0.5 * h) / ratio);float xmax = (float)((cx + 0.5 * w) / ratio);float ymax = (float)((cy + 0.5 * h) / ratio);int left = (int)((cx - 0.5 * w) / ratio);int top = (int)((cy - 0.5 * h) / ratio);int width = (int)(w / ratio);int height = (int)(h / ratio);confidences.Add(max_class_socre);boxes.Add(new Rect(left, top, width, height));classIds.Add(max_ind);}pdata += nout;}}}int[] indices;CvDnn.NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, out indices);result_image = image.Clone();for (int ii = 0; ii < indices.Length; ++ii){int idx = indices[ii];Rect box = boxes[idx];Cv2.Rectangle(result_image, new OpenCvSharp.Point(box.X, box.Y), new OpenCvSharp.Point(box.X + box.Width, box.Y + box.Height), new Scalar(0, 0, 255), 2);string label = class_names[classIds[idx]] + ":" + confidences[idx].ToString("0.00");Cv2.PutText(result_image, label, new OpenCvSharp.Point(box.X, box.Y - 5), HersheyFonts.HersheySimplex, 1, new Scalar(0, 0, 255), 2);}pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());textBox1.Text = "推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms";}private void pictureBox2_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox2.Image);}private void pictureBox1_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox1.Image);}}
}
下载
可执行程序exe下载
源码下载
相关文章:
C# OpenCvSharp DNN FreeYOLO 密集行人检测
目录 效果 模型信息 项目 代码 下载 C# OpenCvSharp DNN FreeYOLO 密集行人检测 效果 模型信息 Inputs ------------------------- name:input tensor:Float[1, 3, 192, 320] --------------------------------------------------------------- …...

一次HW红初面试
一、描述外网打点的流程? 靶标确认、信息收集、漏洞探测、漏洞利用、权限获取。最终的目的是获取靶标的系统权限/关键数据。 在这个过程中,信息收集最为重要。掌握靶标情报越多,后续就会有更多的攻击方式去打点。比如:钓鱼邮件、…...

网络攻防中nginx安全配置,让木马上传后不能执行、让木马执行后看不到非网站目录文件、命令执行后权限不能过高
网络攻防中nginx安全配置,让木马上传后不能执行、让木马执行后看不到非网站目录文件、命令执行后权限不能过高。 0x01 Nginx介绍 nginx本身不能处理PHP,它只是个web服务器,当接收到请求后,如果是php请求,则发给php解释器处理,并把结果返回给客户端。nginx一般是把请求发…...

ctfshow web入门 php特性 web146-web150
1.web146 :被过滤了,三元运算符用不了,还可以用位运算符,逻辑运算符,等,逻辑运算符要注意或运算符的短路性 eval(return 1|phpinfo()|1) eval(return 1phpinfo()|1) payload: v11&v20&v3(~%8C%86%8C%8B%9A%92…...
Linux:kubernetes(k8s)prestop事件的使用(10)
他的作用是在结束pod容器之后进行的操作 apiVersion: v1 # api文档版本 kind: Pod # 资源对象类型 metadata: # pod相关的元数据,用于描述pod的数据name: nginx-po # pod名称labels: # pod的标签type: app #这个是随便写的 自定义的标签version: 1.0.0 #这个…...

vue2【详解】生命周期(含父子组件的生命周期顺序)
1——beforeCreate:在内存中创建出vue实例,数据观测 (data observer) 和 event/watcher 事件配置还没调用(data 和 methods 属性还没初始化) 【执行数据观测 (data observer) 和 event/watcher 事件配置】 2——created…...

C++基础语法和概念
基本语法和数据类型 C 是一种高性能的编程语言,允许程序员对内存管理进行精细控制。了解 C 的基本语法和数据类型是学习这门语言的第一步。以下是一些基础概念的详细介绍: 基本语法 程序结构 一个基础的 C 程序通常包括一个或多个头文件引用、一个 m…...

Vue.js+SpringBoot开发海南旅游景点推荐系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 用户端2.2 管理员端 三、系统展示四、核心代码4.1 随机景点推荐4.2 景点评价4.3 协同推荐算法4.4 网站登录4.5 查询景点美食 五、免责说明 一、摘要 1.1 项目介绍 基于VueSpringBootMySQL的海南旅游推荐系统ÿ…...

mysql笔记:11. 性能优化
文章目录 概览查询速度优化1. 分析查询语句1.1 EXPLAIN1.2 DESCRIBE 2. 使用索引优化查询3. 优化子查询 数据库结构优化1. 分解表2. 建立中间表3. 增加冗余字段4. 优化插入速度4.1. MyISAM引擎表4.2. InnoDB引擎表 5. 分析表、检查表和优化表5.1. 分析表5.2. 检查表5.3. 优化表…...
基于Docker搭建Maven私服仓库(Linux)详细教程
文章目录 1. 下载镜像并启动容器2. 配置Nexus3. 配置本地Maven仓库 1. 下载镜像并启动容器 下载Nexus3镜像 docker pull sonatype/nexus3查看Nexus3镜像是否下载成功 docker images创建Nexus3的挂载文件夹 mkdir /usr/local/nexus-data && chown -R 200 /usr/local…...

IPSEC VPPN 实验
背景:FW1和FW2为双机热备 要求:在FW5和FW3之间建立一条IPSEC通道,保证10.0.2.0/24网段可以正常访问到192.168.1.0/24IPSEC VPPN实验配置 fw2配置 加密数据流 新建对应IKE...

基于单片机的视觉导航小车设计
目 录 摘 要 I Abstract II 引 言 1 1 总体方案设计 3 1.1 方案论证 3 1.2 项目总体设计 3 2 项目硬件设计 4 2.1 主控模块设计 4 2.1.1单片机选型 4 2.1.2 STM32F103RCT6芯片 4 2.2单片机最小系统电路 5 2.3电机驱动模块设计 7 2.4红外模块设计 8 2.5红外遥控模块设计 9 2.6超…...
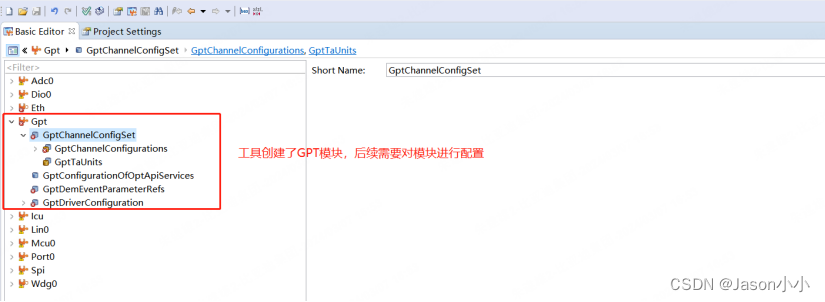
Autosar教程-Mcal教程-GPT配置教程
3.3GPT配置、生成 3.3.1 GPT配置所需要的元素 GPT实际上就是硬件定时器,需要配置的元素有: 1)定时器时钟:定时器要工作需要使能它的时钟源 2)定时器分步:时钟源进到定时器后可以通过分频后再给到定时器 定时器模块选择:MCU有多个定时器模块,需要决定使用哪个定时器模块作…...
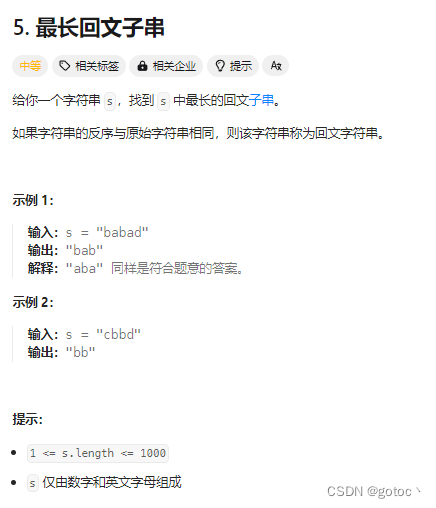
力扣--动态规划5.最长回文子串
class Solution { public:string longestPalindrome(string s) {// 获取输入字符串的长度int n s.size();// 如果字符串长度为1,直接返回原字符串,因为任何单个字符都是回文串if (n 1)return s;// 创建一个二维数组dp,用于记录子串是否为回…...
)
PokéLLMon 源码解析(一)
.\PokeLLMon\poke_env\concurrency.py # 导入必要的模块 import asyncio import atexit import sys from logging import CRITICAL, disable from threading import Thread from typing import Any, List# 在新线程中运行事件循环 def __run_loop(loop: asyncio.AbstractEvent…...

银河麒麟服务器操作系统V10【vnc配置多用户登录】
1.添加多用户(规划kingbase使用5901窗口,root使用5903); adduser kingbase 2.配置文件; cp -rp /lib/systemd/system/vncserver.service /etc/systemd/system/vncserver:1.servicecp -rp /lib/systemd/system/vncse…...
Logseq电脑端+安卓端同步gitee或github
文章目录 0.初衷1.电脑端1.1 新建仓库1.2 克隆项目,生成秘钥1.3 添加图谱,选择文件目录,我是原本就有笔记,所以会如下所示。1.4 下载脚本文件1.5赋权限 (windows可跳过)1.6 修改脚本命令1.7 logseq设置同步…...

【FAQ】HarmonyOS SDK 闭源开放能力 —Map Kit
1.问题描述 在App中供用户在地图上选择地址,目前在使用Map Kit结合geolocationManager逆地理编码时获取的地址信息描述不准确,希望能提供相应的Demo参考。 解决方案 Demo代码示例: getLocation() { let requestInfo: geoLocationManager.…...

【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6 文章目录 前言一、创建controller相关二、逻辑分析RRBotModularJoint类解析ros2_control.xacro解析三、测试运行测试forward_position_controller总结前言 本篇文章在上篇文章的基础上主要讲解双轴机器人驱…...
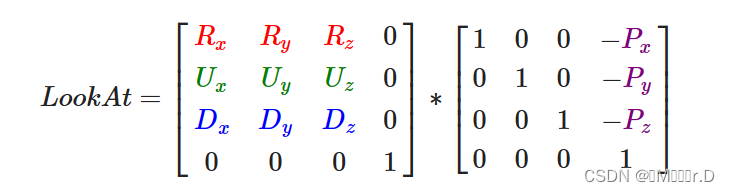
Learn OpenGL 07 摄像机
定义摄像机参数 glm::vec3 cameraPos glm::vec3(0.0f, 0.0f, 3.0f);//摄像机位置glm::vec3 cameraTarget glm::vec3(0.0f, 0.0f, 0.0f);glm::vec3 cameraDirection glm::normalize(cameraPos - cameraTarget);//摄像机方向,指向z轴正方向 glm::vec3 up glm::vec…...

Anything to RealCharacters 2.5D转真人引擎效果展示:动漫角色→写实年龄渐变效果实现
Anything to RealCharacters 2.5D转真人引擎效果展示:动漫角色→写实年龄渐变效果实现 获取更多AI镜像 想探索更多AI镜像和应用场景?访问 CSDN星图镜像广场,提供丰富的预置镜像,覆盖大模型推理、图像生成、视频生成、模型微调等多…...

别再折腾PPT了!用VSCode + Marp插件,5分钟搞定一份高颜值Markdown幻灯片
用VSCode和Marp打造极简主义幻灯片:开发者首选的高效演示方案 在技术分享、教学演示或项目汇报的场景中,我们常常陷入一个两难困境:既希望保持内容的专业性和技术感,又不想在幻灯片设计上耗费过多时间。传统PPT软件虽然功能强大&a…...

2026抖音买单服务商专业解析:同城商家如何选择实力合作伙伴
在同城商家加速数字化转型的背景下,抖音买单作为"支付引流"的一体化工具,其核心价值正被越来越多的实体商户所关注。然而,面对市场上各类服务商宣传,如何准确评估合作伙伴的专业实力,成为商家决策的关键痛点…...

黑苹果触摸板终极配置指南:从卡顿到流畅的完整解决方案
黑苹果触摸板终极配置指南:从卡顿到流畅的完整解决方案 【免费下载链接】Hackintosh Hackintosh long-term maintenance model EFI and installation tutorial 项目地址: https://gitcode.com/gh_mirrors/ha/Hackintosh 还在为黑苹果触摸板的生硬操作而烦恼吗…...
)
保姆级教程:在RTX 4090上复现TVCG2024顶会论文PGSR(3D高斯表面重建)
在RTX 4090上实战复现PGSR:3D高斯表面重建的完整工程指南 当3D高斯抛雪球(3DGS)遇上几何约束,会碰撞出怎样的火花?ZJU-3DV团队发表在TVCG2024的PGSR论文,通过平面化高斯表示和几何正则化,在保持…...

RAG的完整链路拆解:从文档切片到向量检索到LLM回答
RAG是目前最主流的破解方案:不改模型,而是在回答之前先去知识库里把相关信息捞出来,跟问题一起喂给LLM。LLM从万事通变成了带参考资料的答题者。 上篇我们搞清了一件事:LLM的知识边界就是训练数据的边界。超出这个边界它不会说不知…...

支付集成的优雅革命:Yansongda Pay 如何让多平台接入变得如此简单
支付集成的优雅革命:Yansongda Pay 如何让多平台接入变得如此简单 【免费下载链接】pay 可能是我用过的最优雅的 Alipay/WeChat/Douyin/Unipay/江苏银行 的支付 SDK 扩展包了 项目地址: https://gitcode.com/gh_mirrors/pa/pay 还在为支付宝、微信、抖音、银…...

nli-distilroberta-base生产环境:低延迟NLI服务在实时对话系统中的嵌入
nli-distilroberta-base生产环境:低延迟NLI服务在实时对话系统中的嵌入 1. 项目概述 nli-distilroberta-base是一个基于DistilRoBERTa模型的轻量级自然语言推理(NLI)服务,专门为生产环境优化设计。它能快速判断两个句子之间的逻辑关系,为实…...

CoPaw多模态理解初步探索:处理图像描述与图文关联任务
CoPaw多模态理解初步探索:处理图像描述与图文关联任务 1. 多模态理解的新尝试 最近在测试CoPaw模型时,我发现一个有趣的现象:虽然它并非原生支持多模态输入,但通过巧妙的提示工程,这个文本模型竟然能展现出对图像内容…...

别再只用柱状图了!用Origin玩转‘柱状+点线’组合图,轻松应对论文审稿人的图表挑剔
科研图表升级指南:用Origin打造兼具数据对比与趋势分析的组合图表 在学术论文写作中,图表是研究成果最直观的呈现方式。许多研究者习惯使用单一的柱状图展示数据,但当审稿人要求同时体现数值比较和时间趋势时,这种简单图表就显得力…...