FPGA静态时序分析与约束(三)、读懂vivado时序报告
系列文章目录
FPGA静态时序分析与约束(一)、理解亚稳态
FPGA静态时序分析与约束(二)、时序分析
文章目录
- 系列文章目录
- 前言
- 一、时序分析回顾
- 二、打开vivado任意工程
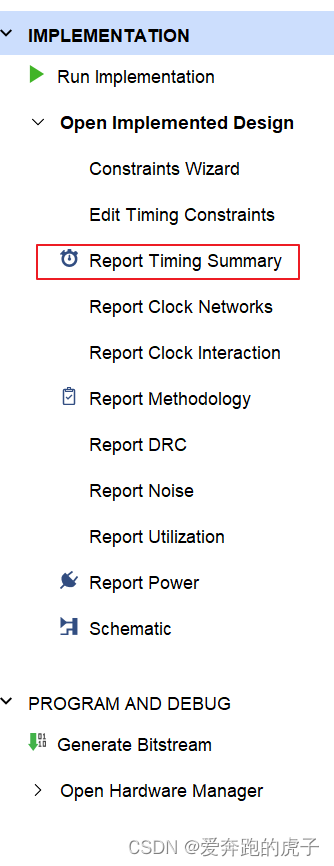
- 2.1 工程布局路由成功后,点击vivado左侧**IMPLEMENTATION**->再点击**Report Timing Summary**
- 2.2 在弹出的界面下面的命令栏,点击**Timing**
- 2.3 点击方框1里面的intra-Clock Paths
- 三、分析静态时序路径
- 3.1 分析源时钟路径
- 3.2 分析数据路径
- 3.3 分析目的时钟路径
- 四、 计算建立时间余量
前言
前两篇文章介绍了什么是亚稳态?以及静态时序分析,但那些终究还是理论,那么在实际工程中,如何分析时序路径呢?如何将理论转到实际呢?
一、时序分析回顾
上篇文章我们知道了建立时间余量和保持时间余量公式为:
- 数据到达时间 Data Arrival time = Tclk1 + Tco + Tdata
- 数据锁存时间 Data Required Time = 锁存沿时间 + Tclk2 - Tsu
- 建立余量公式Setup Slack= 数据锁存时间 - 数据抵达时间
- 数据保持时间 Data Hold Time = Tclk1 + Tco + Tdata +时钟周期
- 数据锁存时间 Data Required Time = 锁存沿 + Tclk2 + Th
- 保持余量 = 数据保持时间 - 数据锁存时间
二、打开vivado任意工程
平台:vivado2020.1
2.1 工程布局路由成功后,点击vivado左侧IMPLEMENTATION->再点击Report Timing Summary
2.2 在弹出的界面下面的命令栏,点击Timing
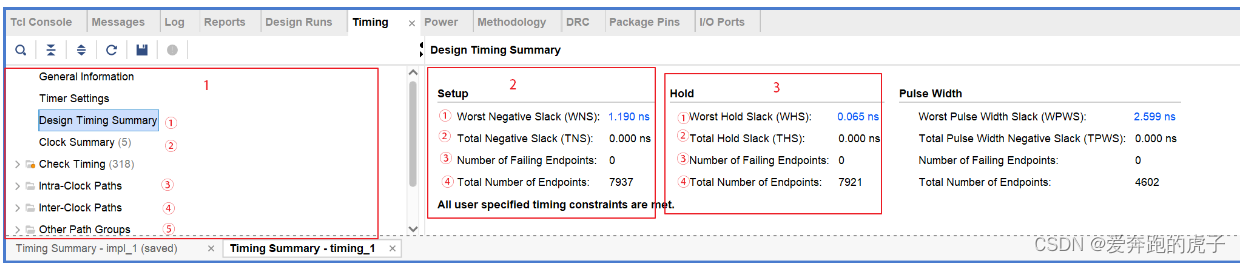
- 方框1里:
①:整个设计的时序总结,如右边两个方框所示
②:整个设计里所有使用的时钟
③:相同时钟域路径
④:异步时钟域路径 - 方框2显示的是建立时间总共的信息:
①:最差建立时间余量
②:总的负建立时间余量之和
③:建立时间违规的节点路径数量
④:总的节点建立时间路径数量 - 方框3显示的是保持时间总共的信息:
①:最差的保持时间余量
②:总的负保持时间余量之和
③:保持时间违规的节点路径数量
④:总的节点保持时间路径数量
2.3 点击方框1里面的intra-Clock Paths
随便点击一个时钟域,看右侧的路径

右侧会显示最差的时序的路径(默认十条),双击path21

- 为该路径的时序余量,等于Data Required Time - Data Arrival time
- 该路径源时钟,这里是27M,周期37.037ns
- 该路径目的时钟,因为这里是同时钟域下的节点路径,所以也是27M,周期37.037ns
- 时序模型为建立时间
- 理想的建立时间为一个周期,参考FPGA静态时序分析与约束(二)、时序分析
- 这条路径总的数据延迟时间,Tdata
- 时钟偏斜
- 时钟的不确定性
- 源时钟路径
- 数据路径
- 目的时钟路径
三、分析静态时序路径
3.1 分析源时钟路径
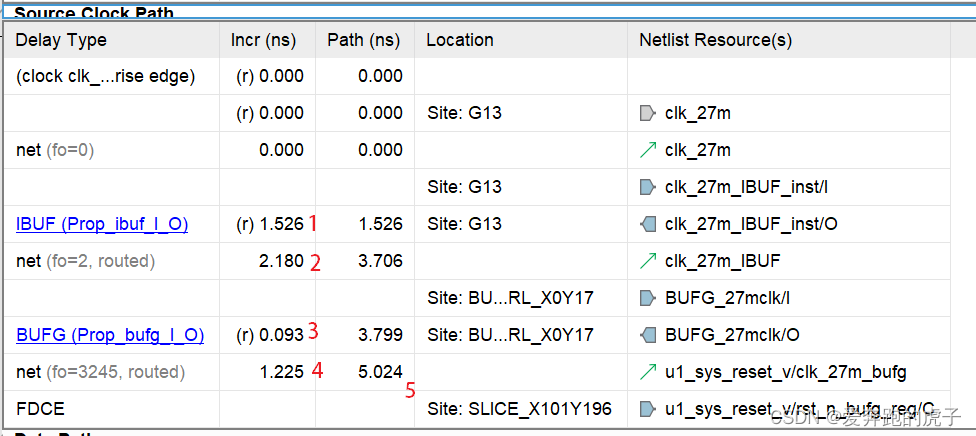
- 时钟从外部管脚进来,经过IBUF,延迟了1.526ns
- 再经过走线net 延迟了2.18ns
- 然后进入BUFG延迟了0.093ns
- 最后经过走线net延迟了1.225ns,到达源寄存器时钟端口
- 总共源时钟路径Tclk1 = 1.526 + 2.18 + 0.093 + 1.225 = 5.024
3.2 分析数据路径

- 数据经过源寄存器Tco时间0.223ns
- 数据经过走线net延迟了4.641ns
- 数据再经过组合逻辑延迟了0.043ns
- 数据最后经过走线延迟了5.485ns
- 根据公式Data Arrival time = Tclk1 + Tco + Tdata=5.024 + 0.223 + (4.641 + 0.043 + 5.485)=15.417ns
3.3 分析目的时钟路径
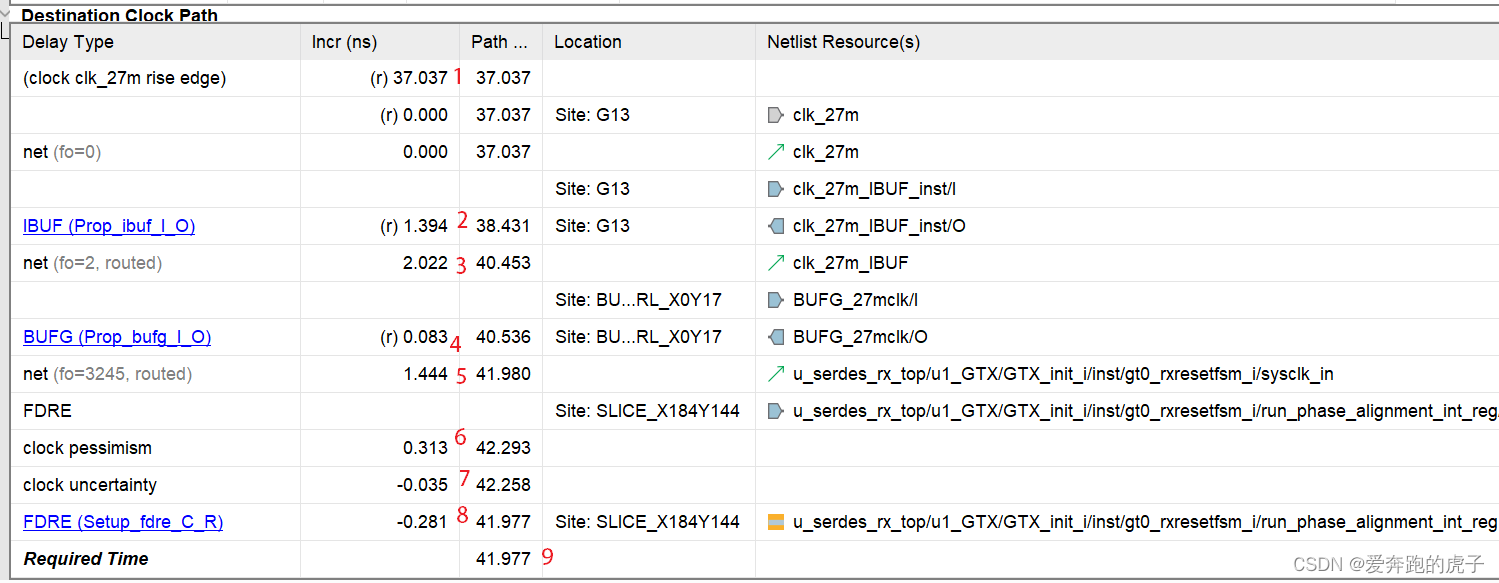
- 锁存沿时间,一个时钟周期37.037ns
- 进入IBUF延迟了1.394ns
- 经过走线延迟了2.022ns
- 经过BUFG延迟了0.083
- 走线延迟了1.444ns
- 时钟悲观延迟,由软件自动算出的延迟0.313ns
- 时钟不确定性因素,-0.035ns
- 寄存器建立时间0.281ns
- Data Required Time = 锁存沿时间 + Tclk2 - Tsu=37.037 + (1.394+2.022+0.083+1.444+0.313 -0.035)-0.281=41.977ns
四、 计算建立时间余量
根据建立余量公式Setup Slack= 数据锁存时间 - 数据抵达时间=41.977-15.417=26.560ns
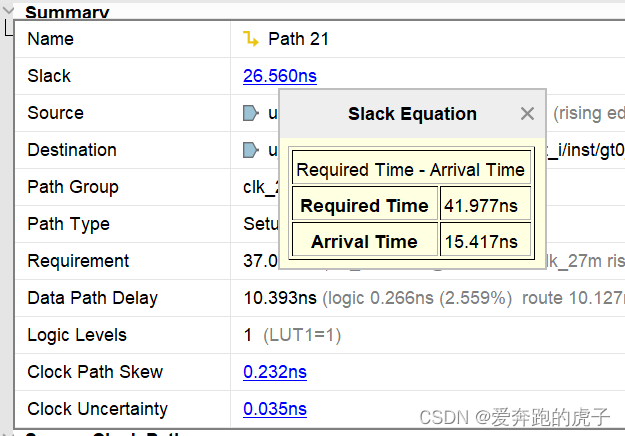
和显示时间余量的一样。
以上就是对viavdo建立时间余量报告的解读,保持时间同理。
FPGA静态时序分析与约束(四)、时序约束
相关文章:
FPGA静态时序分析与约束(三)、读懂vivado时序报告
系列文章目录 FPGA静态时序分析与约束(一)、理解亚稳态 FPGA静态时序分析与约束(二)、时序分析 文章目录 系列文章目录前言一、时序分析回顾二、打开vivado任意工程2.1 工程布局路由成功后,点击vivado左侧**IMPLEMENT…...

鸿蒙Harmony应用开发—ArkTS声明式开发(容器组件:Badge)
可以附加在单个组件上用于信息标记的容器组件。 说明: 该组件从API Version 7开始支持。后续版本如有新增内容,则采用上角标单独标记该内容的起始版本。 子组件 支持单个子组件。 说明: 子组件类型:系统组件和自定义组件…...

Python程序设计基础——代码习题
1 __name__属性 import demodef main():if __name__ __main__:print(这个程序被直接运行。)elif __name__demo:print(这个程序作为模块被使用。) main()3.3 编写程序,生成包含1000个0~100之间的随机整数,并统计每个元素出现的次数。 import randomx[r…...
代码随想录 贪心算法-中等题目-序列问题
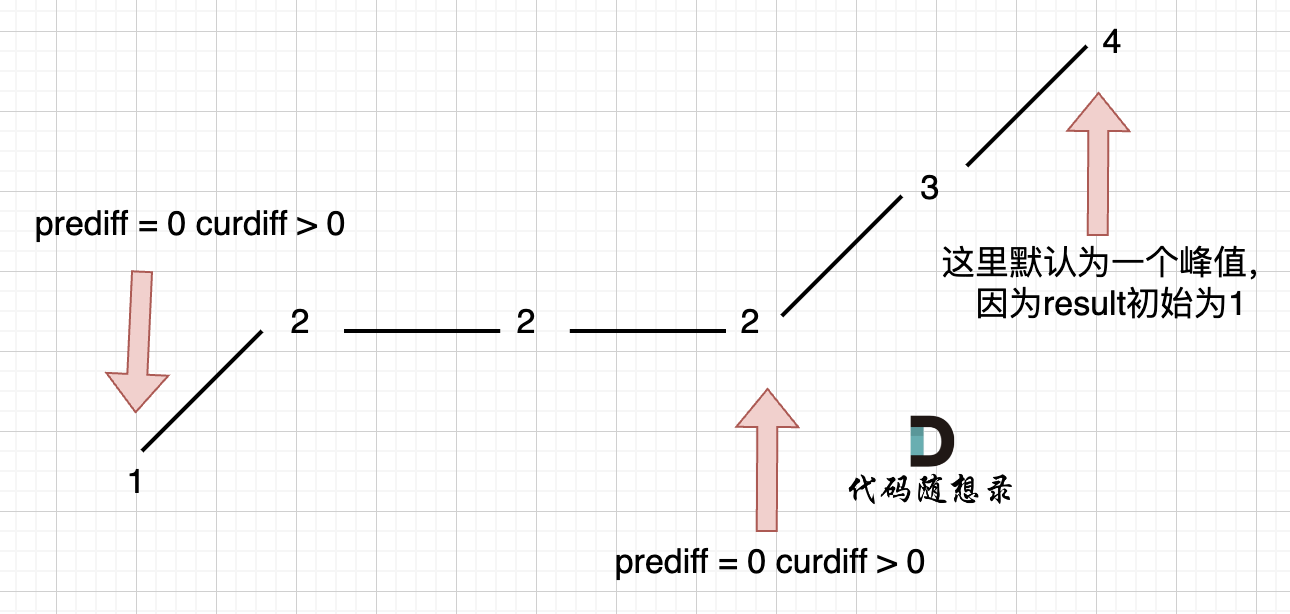
目录 376.摆动序列 738.单调递增的数字 376.摆动序列 376. 摆动序列 中等 如果连续数字之间的差严格地在正数和负数之间交替,则数字序列称为 摆动序列 。第一个差(如果存在的话)可能是正数或负数。仅有一个元素或者含两个不等元素的序列…...
pytest生成allure的报告
首先要下载安装配置allure allure serve ./outputs/allure_report 可以生成html的文件自动在默认浏览器中打开...
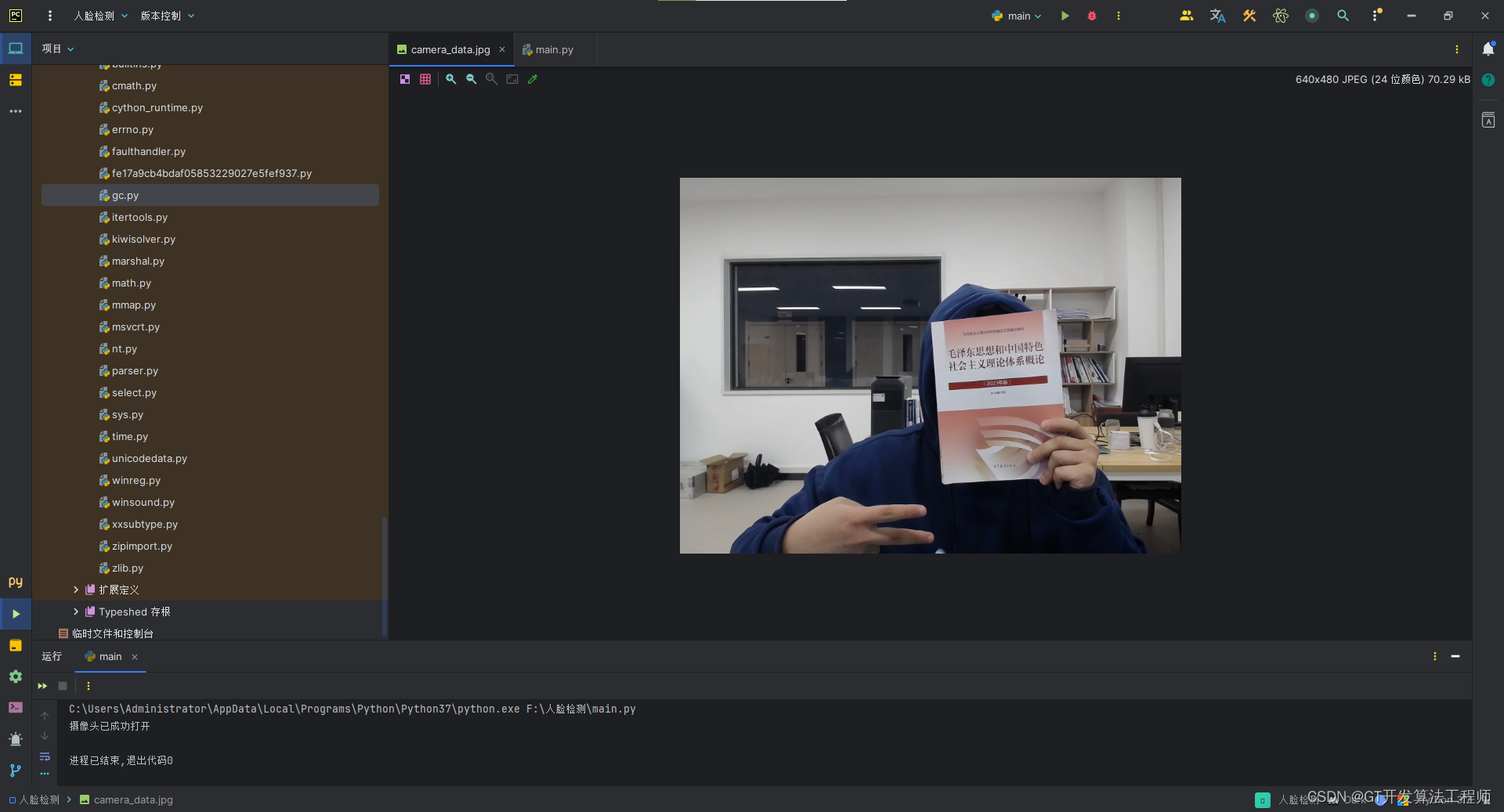
Python控制摄像头并获取数据文件
一、引言 摄像头作为计算机视觉领域的核心设备之一,广泛应用于视频监控、图像采集和数据处理等领域。通过Python编程语言,我们可以实现对摄像头的精确控制,包括摄像头的开启、关闭、参数设置以及数据获取等功能。 目录 一、引言 二、摄像头…...
免费分享一套SpringBoot+Vue自习室(预约)管理系统,帅呆了~~
大家好,我是java1234_小锋老师,看到一个不错的SpringBootVue自习室预约)管理系统,分享下哈。 项目视频演示 【免费】SpringBootVue自习室预约(预约)管理系统 Java毕业设计_哔哩哔哩_bilibili【免费】SpringBootVue自习室预约(预约)管理系统…...

mac删除带锁标识的app
一 、我们这里要删除FortiClient.app 带锁 常规方式删除不掉带锁的 app【如下图】 二、删除命令,依次执行即可。 /bin/ls -dleO /Applications/FortiClient.app sudo /usr/bin/chflags -R noschg /Applications/FortiClient.app /bin/ls -dleO /Applications/Forti…...

PHP异世界云商系统开源源码
系统更新与修复列表 1. 基于彩虹的二次开发 - 对彩虹系统进行了二次开发,增强了系统的功能和性能。2. 新增自定义输入框提示内容(支持批量修改) - 用户可以自定义输入框的提示内容,并支持批量修改,提升用户体验。3. 新…...

Vue生成Canvas二维码
npm install qrcode在Vue组件中引入QRCode库:import QRCode from qrcode;在Vue组件的methods中创建一个方法来生成二维码: generateQRCode() {const canvas this.$refs.qrCodeCanvas; // 获取canvas DOM元素的引用const text Hello, World!; // 要生成…...
JAVA基础—JVM内存结构基础需知
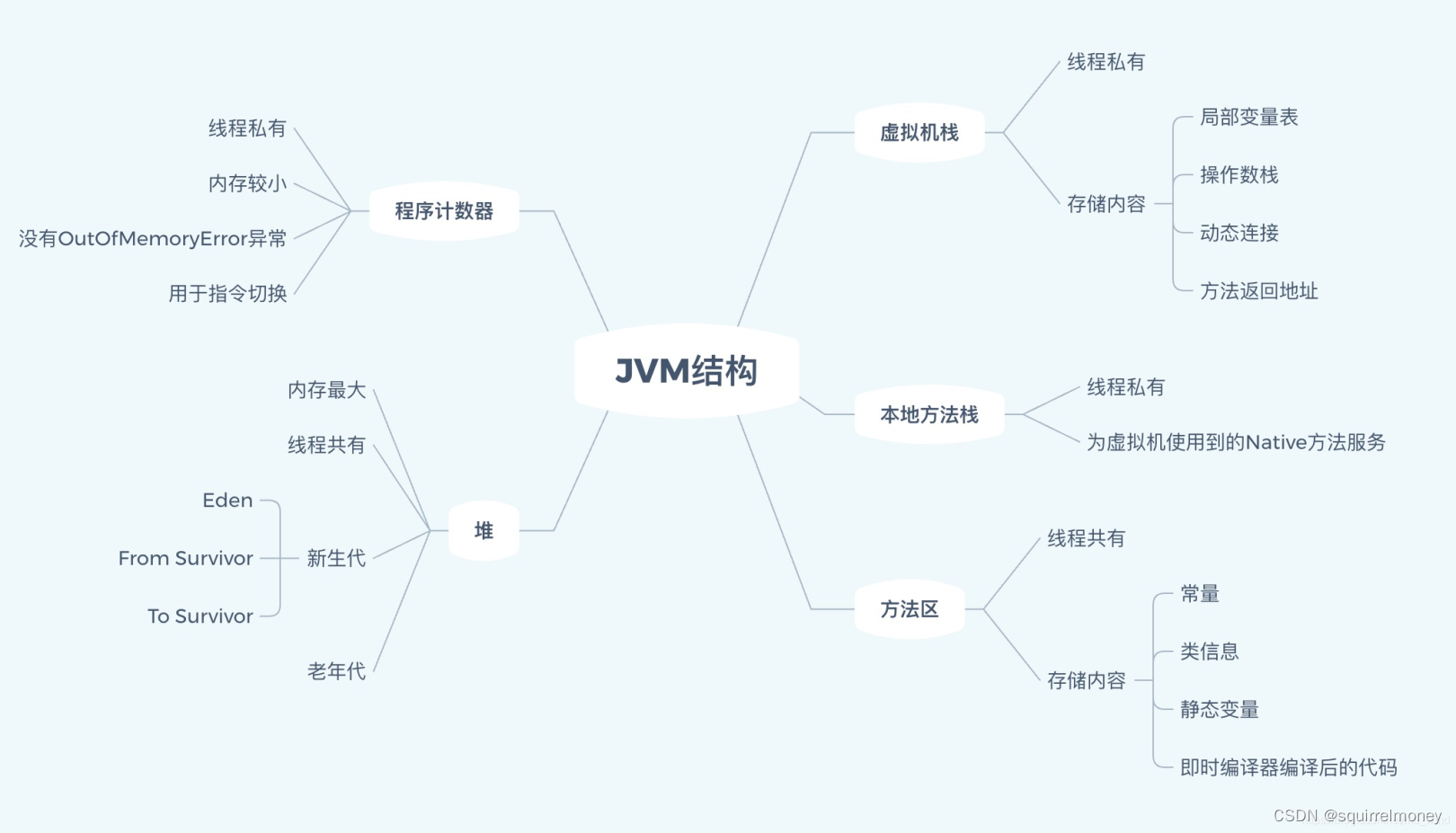
1.JVM内存结构 JVM内存结构分为5个区域:方法区,虚拟机栈,本地方法栈、堆、程序计数器。 1.方法区(Method Area):用于存储类的结构信息、常量、静态变量、即使编译器编译后的代码等数据。方法区也是所有线…...

【滤波专题-第8篇】ICA降噪方法——类EMD联合ICA降噪及MATLAB代码实现(以VMD-ICA为例)
今天来介绍一种效果颇为不错的降噪方法。(针对高频白噪声) 上一篇文章我们讲到了FastICA方法。在现实世界的许多情况下,噪声往往接近高斯分布,而有用的信号(如语音、图像特征等)往往表现出非高斯的特性。F…...
jeecg 启动 微服务 更改配置本地host地址
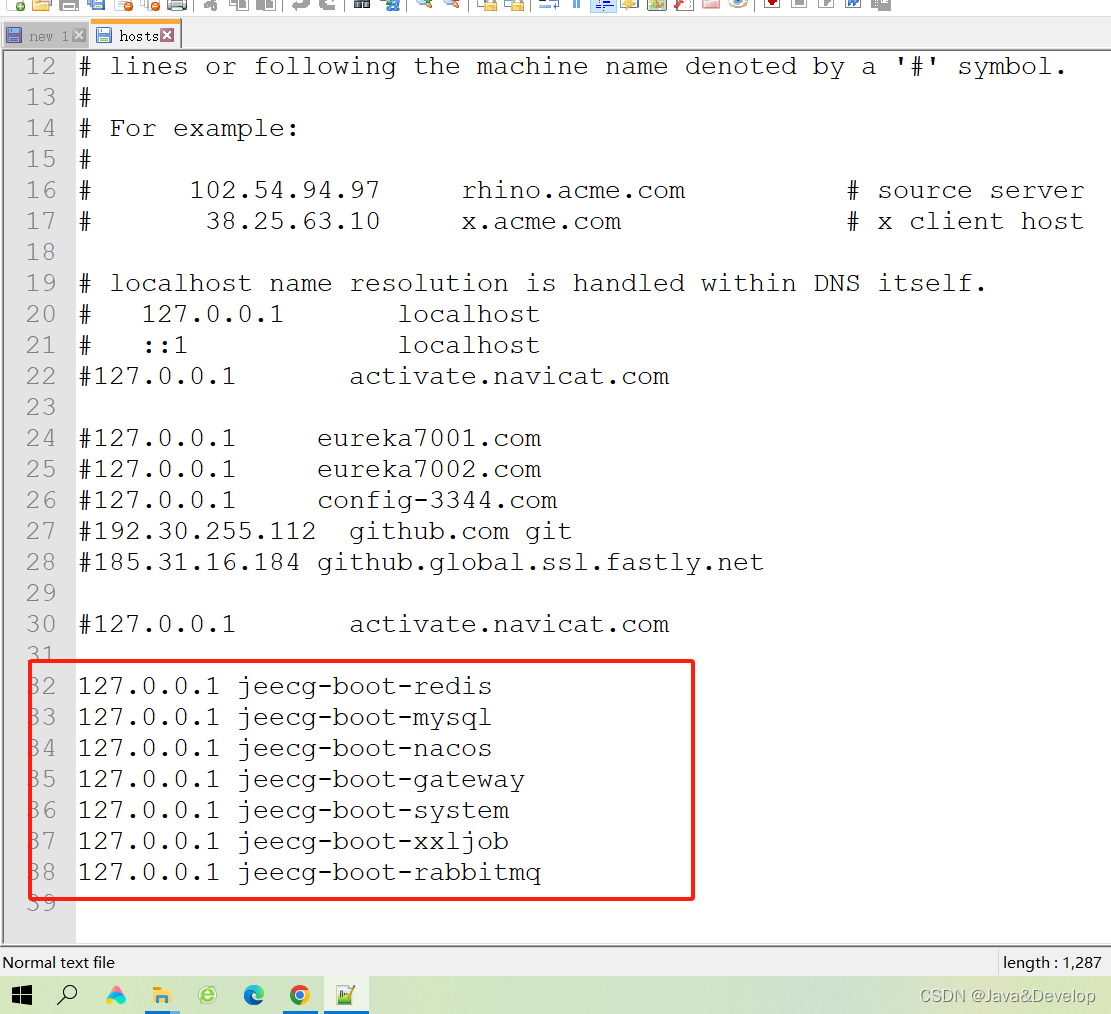
127.0.0.1 jeecg-boot-redis 127.0.0.1 jeecg-boot-mysql 127.0.0.1 jeecg-boot-nacos 127.0.0.1 jeecg-boot-gateway 127.0.0.1 jeecg-boot-system 127.0.0.1 jeecg-boot-sentinel 127.0.0.1 jeecg-boot-xxljob 127.0.0.1 jeecg-boot-rabbitmq1. windows系统下,在开…...
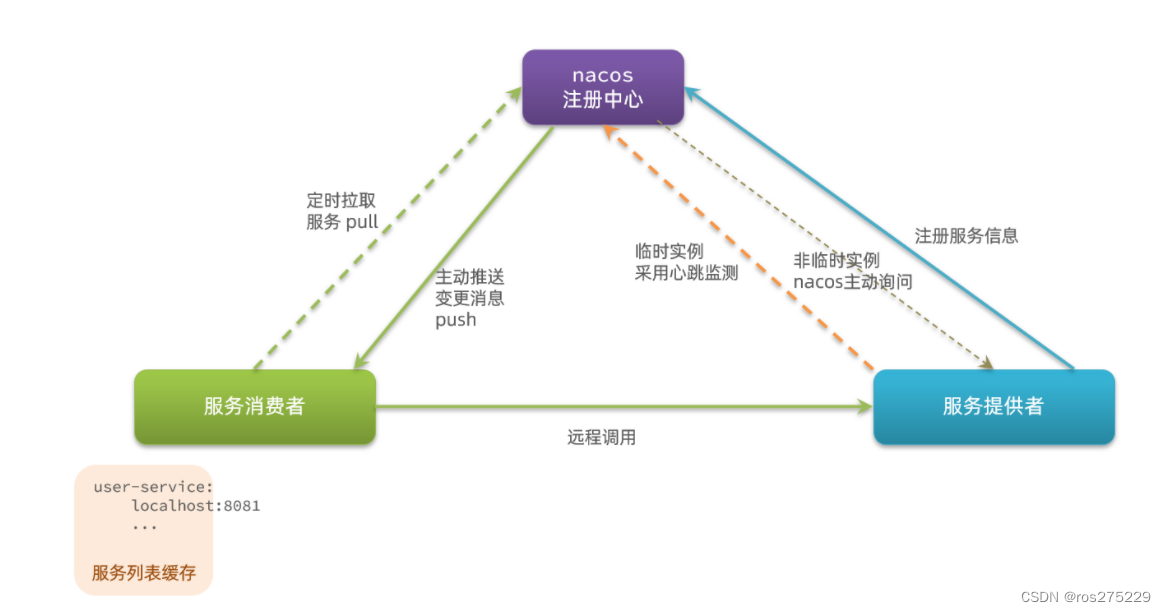
微服务day01 -- SpringCloud01 -- (Eureka , Ribbon , Nacos)
介绍微服务 1.认识微服务(p1-p5) 随着互联网行业的发展,对服务的要求也越来越高,服务架构也从单体架构逐渐演变为现在流行的微服务架构。这些架构之间有怎样的差别呢? 1.0.学习目标 了解微服务架构的优缺点 1.1.单体架构 单体架构&#…...
:2024.03.10-2024.03.15)
AI推介-大语言模型LLMs论文速览(arXiv方向):2024.03.10-2024.03.15
文章目录~ 1.Large Language Models and Causal Inference in Collaboration: A Comprehensive Survey2.VisionGPT-3D: A Generalized Multimodal Agent for Enhanced 3D Vision Understanding3.MT-PATCHER: Selective and Extendable Knowledge Distillation from Large Langu…...

ThingsBoard Edge 安装部署
文章目录 一、概述1.官方文档2.部署说明3.安装准备3.1. 克隆服务器3.2.安装 Docker3.3.安装 Java 113.4.安装 PostgreSQL3.5.下载安装包 二、安装部署1.创建 Edge 实例2.创建数据库3.Edge 服务安装3.1.安装服务3.2.配置 Edge3.3.运行安装脚本3.4.重新启动服务 4.访问 Edge5.故障…...

CSS进阶空间转换和 less
<html> <head> <meta charset"UTF-8" /> <title>空间转换</title> </head> <body> <!-- 空间转换 空间:是从坐标轴角度定义的X,Y,和Z三条坐标轴构成一个立体空间 Z轴位置与视线方向相同 空间转换也叫3D转…...

C/C++ 知识点:| 与 || 的区别
文章目录 一、|与 || 的区别1、按位或运算符 |2、逻辑或运算符 ||3、区别4、总结 前言 在C编程语言中,逻辑或运算符用于连接两个条件表达式,当至少有一个条件为真时,整个表达式的结果为真。C提供了两种逻辑或运算符:按位或|和逻辑…...
CSS中如何设置单行或多行内容超出后,显示省略号
1. 设置超出显示省略号 css设置超出显示省略号可分两种情况: 单行文本溢出显示省略号…多行文本溢出显示省略号… 但使用的核心代码是一样的:需要先使用 overflow:hidden;来把超出的部分隐藏,然后使用text-overflow:ellipsis;当文本超出时…...

PFA烧杯透明聚四氟乙烯刻度量杯
PFA烧杯,刻度清晰,耐酸碱,和有机溶剂。...

新手也能懂的SSRF漏洞实战:用iwebsec靶场复现文件读取与内网探测
从零开始掌握SSRF漏洞:iwebsec靶场实战指南1. 认识SSRF漏洞的本质想象一下,你正在一家高档餐厅点餐,服务员承诺可以帮你从任何地方获取食材——包括隔壁竞争对手的厨房。SSRF(Server-Side Request Forgery)漏洞就像这个…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...

关于psthon问题
我想问问各位 我python可以查到 但是我的bit文件查不到python怎么回事...

Sora 2 MOV导出画质崩坏真相:HDR10元数据丢失、BT.2020色域截断、帧率标志位误写——3大隐性缺陷紧急修复方案
更多请点击: https://intelliparadigm.com 第一章:Sora 2 MOV导出画质崩坏的系统性认知 Sora 2 在生成高保真视频后,导出为 MOV 格式时频繁出现色度抽样失真、动态范围压缩、帧间伪影加剧等现象,其本质并非单一环节失效ÿ…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

sngan_projection论文解读:ICLR2018两大GAN技术的完美结合
sngan_projection论文解读:ICLR2018两大GAN技术的完美结合 【免费下载链接】sngan_projection GANs with spectral normalization and projection discriminator 项目地址: https://gitcode.com/gh_mirrors/sn/sngan_projection sngan_projection是一个实现了…...

同步带装配工艺要点与损伤防控策略
一、引言在工业精密传动系统中,盖茨同步带凭借高精度、高效率、无滑差的优势,成为自动化设备、精密机床、输送产线的核心传动部件。多数企业在运维中,普遍将同步带异常磨损、断齿、断带等故障归咎于工况恶劣或产品质量问题,却忽略…...

如何用HsMod解锁炉石传说60+项隐藏功能:终极优化指南
如何用HsMod解锁炉石传说60项隐藏功能:终极优化指南 【免费下载链接】HsMod Hearthstone Modification Based on BepInEx 项目地址: https://gitcode.com/GitHub_Trending/hs/HsMod HsMod是一款基于BepInEx开发的炉石传说功能增强插件,为玩家提供…...

LPCM框架:大模型驱动的计算机架构设计革命
1. LPCM框架:计算机系统架构设计的范式革命计算机系统架构设计正站在历史性的转折点上。过去八十年来,从ENIAC的真空管到现代7纳米制程的异构计算芯片,架构设计始终遵循着"专家经验EDA工具"的传统范式。但随着摩尔定律逼近物理极限…...

深度解析:JetBrains IDE试用期重置机制的技术实现
深度解析:JetBrains IDE试用期重置机制的技术实现 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 在软件开发工作流中,JetBrains IDE试用期管理是一个常见的技术挑战,尤其是在多…...