无人机自动返航算法实现与优化
一、引言
随着无人机技术的快速发展,其在航拍、农业、救援等领域的应用越来越广泛。在这些应用中,无人机的自动返航功能显得尤为重要。一旦无人机失去控制或与遥控器失去连接,自动返航算法能够确保无人机安全返回起飞点,避免损失和安全事故的发生。
目录
一、引言
二、常见自动返航算法概述
目前,常见的无人机自动返航算法主要包括基于GPS的返航算法、基于视觉的返航算法以及基于组合导航的返航算法等。这些算法各有优缺点,适用于不同的应用场景。
三、基于GPS和姿态控制的自动返航算法实现
以下是该算法的代码实现示例(以伪代码形式展示):
四、算法优化与改进
为了提高无人机自动返航的准确性和稳定性,我们可以从以下几个方面对算法进行优化:
结论

二、常见自动返航算法概述
-
目前,常见的无人机自动返航算法主要包括基于GPS的返航算法、基于视觉的返航算法以及基于组合导航的返航算法等。这些算法各有优缺点,适用于不同的应用场景。
三、基于GPS和姿态控制的自动返航算法实现
在本文中,我们将重点介绍一种基于GPS和姿态控制的自动返航算法。该算法通过GPS模块获取无人机的实时位置信息,并与起飞点的位置进行比较,计算出返航所需的飞行方向和距离。同时,利用姿态控制模块调整无人机的飞行姿态,确保其在返航过程中保持稳定。
-
以下是该算法的代码实现示例(以伪代码形式展示):
# 假设有以下变量和函数
# current_position: 当前无人机位置(经纬度)
# takeoff_position: 起飞点位置(经纬度)
# calculate_heading: 根据当前位置和起飞点计算返航方向
# set_heading: 设置无人机的飞行方向
# adjust_altitude: 调整无人机的飞行高度
# fly_to_position: 控制无人机飞行到指定位置 def auto_return_to_home(): # 计算返航方向 heading = calculate_heading(current_position, takeoff_position) # 设置无人机飞行方向 set_heading(heading) # 调整无人机飞行高度至返航高度 adjust_altitude(return_altitude) # 控制无人机飞行至起飞点 fly_to_position(takeoff_position)- 在实际应用中,需要根据具体的无人机硬件和控制系统对上述伪代码进行实现和优化。
四、算法优化与改进
-
为了提高无人机自动返航的准确性和稳定性,我们可以从以下几个方面对算法进行优化:
- 路径规划优化:考虑地形、障碍物等因素,规划出更加安全、高效的返航路径。
- 风阻和气流补偿:根据实时气象数据,对无人机的飞行轨迹进行补偿,减少外界因素对返航精度的影响。
- 姿态控制优化:采用更先进的姿态控制算法,提高无人机在飞行过程中的稳定性和抗风能力。
- 电源管理优化:合理管理无人机的电源,确保在返航过程中有足够的电量完成飞行任务。
结论
本文介绍了无人机自动返航算法的实现与优化过程。通过基于GPS和姿态控制的自动返航算法,我们可以确保无人机在失去控制或与遥控器失去连接时能够安全返回起飞点。同时,通过对算法进行优化和改进,我们可以进一步提高无人机返航的准确性和稳定性。
相关文章:
无人机自动返航算法实现与优化
一、引言 随着无人机技术的快速发展,其在航拍、农业、救援等领域的应用越来越广泛。在这些应用中,无人机的自动返航功能显得尤为重要。一旦无人机失去控制或与遥控器失去连接,自动返航算法能够确保无人机安全返回起飞点,避免损失和…...
切面条-蓝桥杯?-Lua 中文代码解题第1题
切面条-蓝桥杯?-Lua 中文代码解题第1题 一根高筋拉面,中间切一刀,可以得到2根面条。 如果先对折1次,中间切一刀,可以得到3根面条。 如果连续对折2次,中间切一刀,可以得到5根面条。 那么…...
WebRTC:真正了解 RTP 和 RTCP
介绍 近年来,通过互联网进行实时通信变得越来越流行,而 WebRTC 已成为通过网络实现实时通信的领先技术之一。WebRTC 使用多种协议,包括实时传输协议 (RTP) 和实时控制协议 (RTCP)。 RTP负责通过网络传输音频和视频数据,而RTCP负责…...

vue实现双向绑定原理深度解析
1. vue双向绑定应用场景 Vue的双向绑定机制主要体现在以下几个方面: 表单输入:在表单输入中,Vue的双向绑定机制非常有用。通过v-model指令,可以将表单元素的值与Vue实例中的数据进行双向绑定,当用户在表单输入框中输入内容时,数据会自动更新,反之,当数据发生变化时,输…...
C语言 —— memeove函数的模拟实现
函数作用:从sourse的位置开始向后复制num个字节到desttintion指向的内存位置,(运用于字符时,遇到\0不会停止),这个函数支持重叠部分的复制,是memcpy函数的改进版本 具体步骤: 1&am…...

<el-tab>样式自定义——一个可以触类旁通的小例子
首先在网页的检查确定想要自定义的部分叫什么 例如: 我想修改的组件是el-tabs__header.is-top 的margin-bottom 则在相应vue文件的<style>里面增加这一属性 其中,::v-deep可以帮助覆盖子组件内部元素的样式。 ::v-deep .el-tabs__header.is-to…...

XDP学习笔记
XDP的使用与eBPF程序分不开,因此要了解学历XDP,须知道什么是eBPF、什么是XDP。 概念 eBPF BPF(Berkeley Packet Filter)是一种灵活且高效的数据包过滤技术,最初由 BSD Unix 中的网络子系统引入;BPF 允许用…...
JavaScript进阶:js的一些学习笔记-4
文章目录 1. 拷贝1. 浅拷贝2. 深拷贝 2. 异常处理 1. 拷贝 这里指的拷贝是指拷贝引用类型的数据(对象) 1. 浅拷贝 拷贝对象:Object.assign() 或者 {…obj} 展开运算符 const obj {name:liuze,age:23 } const o {...obj}; o.age 22; console.log(o); console.…...

【可能是全网最丝滑的LangChain教程】三、快速入门LLMChain
系列文章地址 【可能是全网最丝滑的LangChain教程】一、LangChain介绍 【可能是全网最丝滑的LangChain教程】二、LangChain安装 使用LangChain构建应用 LangChain支持构建应用程序,将外部数据源和计算源连接到LLM。我们将从一个简单的 LLM 链开始,它…...
Oracle Primavera Analytics 是什么,与P6的关系?
前言 Oracle Primavera P6 Analytics 是与P6有关的一个相对较新的模块,Primavera 用户社区在很大程度上尚未对其进行探索。 那么它到底有什么作用呢? 通过了解得知它旨在通过深入了解组织的项目组合绩效,帮助高级管理层对其项目组合做出更好…...

在 Amazon Bedrock 上使用 Anthropic Claude 系统 Prompt
系统 prompt 是定义生成式 AI 模型对用户输入的响应策略的一种好方法。这篇博文将介绍什么是系统 prompt,以及如何在基于 Anthropic Claude 2.x 和 3 的应用中使用系统 prompt。 亚马逊云科技开发者社区为开发者们提供全球的开发技术资源。这里有技术文档、开发案例…...

【LeetCode】动态规划--题目练习
有关动态规划算法的整理:添加链接描述 1.爬楼梯 爬楼梯:LeetCode70 int climbStairs(int n) {//1.确定dp数组和意义 dp[n]表示第n阶的方法//2.确定递推关系式 dp[n] dp[n-1]dp[n-2];//3.初始化int dp[50] {0};dp[1] 1;dp[2] 2;for(int i 3;i<n;i){dp[i] …...
【LeetCode热题100】101. 对称二叉树(二叉树)
一.题目要求 给你一个二叉树的根节点 root , 检查它是否轴对称。 二.题目难度 简单 三.输入样例 示例 1: 输入:root [1,2,2,3,4,4,3] 输出:true 示例 2: 输入:root [1,2,2,null,3,null,3] 输出&a…...

VLC抓取m3u8视频
前言 最近想看一些网络视频,但是很多时候网页上是m3u8推流的,如果在线看,速度又慢,所以就想下载下来,就想到了VLC的推流,转换能力,查阅资料,加上实践,总结心得。 设置中…...

聊聊Python都能做些什么
文章目录 一、Python简介二、Python都能做些什么1. Web开发2. 数据分析和人工智能3. 自动化运维和测试4. 网络爬虫5. 金融科技 三、Python开源库都有哪些1. Web开发2. 数据分析和科学计算3. 机器学习和深度学习4. 网络爬虫5. 自动化和测试6. 其他常用库 四、相关链接 一、Pytho…...

JavaWeb06-MVC和三层架构
目录 一、MVC模式 1.概述 2.好处 二、三层架构 1.概述 三、MVC与三层架构 四、练习 一、MVC模式 1.概述 MVC是一种分层开发的模式,其中 M:Model,业务模型,处理业务 V: View,视图,界面展…...

MySQL数据库实现增删改查基础操作
准备工作 安装mysql8.0 (安装时一定要记住用户名和密码)安装数据库可视化视图工具Navicat 请注意⚠️⚠️⚠️⚠️ a. 编程类所有软件不要安装在中文目录下 b. Navicat破解版下载安装教程:(由于文章审核提示版权问题,链接不方便给出ÿ…...
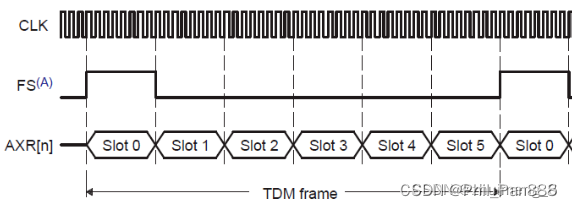
PCM和I2S区别
I2S和PCM接口都是数字音频接口,而所见的蓝牙到cpu以及codec的音频接口都是用PCM接口,是不是两个接口有各自不同的应用呢?先来看下概念。 PCM(PCM-clock、PCM-sync、PCM-in、PCM-out)脉冲编码调制,模拟语音信…...
大模型笔记:吴恩达 ChatGPT Prompt Engineering for Developers(1) prompt的基本原则和策略
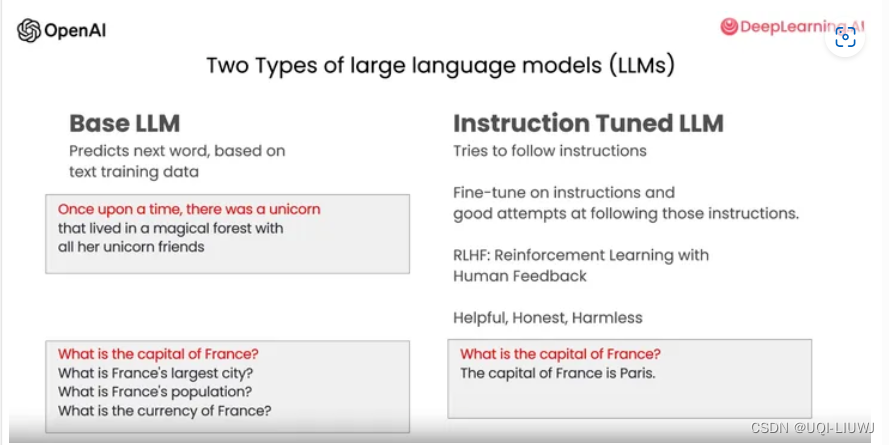
1 intro 基础大模型 VS 用指令tune 过的大模型 基础大模型 只会对prompt的文本进行续写 所以当你向模型发问的时候,它往往会像复读机一样续写几个问题这是因为在它见过的语料库文本(通常大多来自互联网)中,通常会连续列举出N个问…...

设计模式 — — 单例模式
一、是什么 单例模式只会在全局作用域下创建一次实例对象,让所有需要调用的地方都共享这一单例对象 二、实现 // 单例构造函数 function CreateSingleton (name) {this.name name;this.getName(); };// 获取实例的名字 CreateSingleton.prototype.getName func…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

极致精简,功能强大的PDF编辑工具
这是一款功能全面的PDF编辑工具 你只需要导入一份PDF格式文件 就可以快速的对它进行插入 批注编辑保护转换等各种操作 而且无需登录 也可以直接使用 在插入选项中可以进行插入文字图片 页面页眉页脚页码文档背景水印视频音频等 在批注选项中可以管理批注隐藏批注 高亮显示 文本…...

为内部知识库问答机器人接入Taotoken多模型增强回答效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部知识库问答机器人接入Taotoken多模型增强回答效果 构建一个高效的企业内部知识库问答机器人,核心挑战在于如何让…...
)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)当你的UE5 RPG项目发展到中期,技能数量从十几个膨胀到几十个时,最痛苦的莫过于发现InputAction绑定已经变成一团乱麻。每次新增技能都要修改输入绑定逻辑&a…...

Unity iOS构建报错SDK version is 0的根因与精准修复
1. 这个报错不是Unity在“发脾气”,而是工程配置在“装死”刚接手一个老项目,打开Unity编辑器,点Build Settings准备打包iOS,结果弹出一行红字:“SDK version is 0, cannot build”。我第一反应是——这什么鬼…...

告别DLL缺失烦恼!Visual C++运行库合集一键搞定Windows应用依赖问题
告别DLL缺失烦恼!Visual C运行库合集一键搞定Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经在打开某个软件或游戏时…...

工业云脑:06 现在就能干:树莓派边缘盒子+PLC,10分钟缺陷检测小案例
06 现在就能干:树莓派边缘盒子+PLC,10分钟缺陷检测小案例 今天第九篇06小节——现在就能干:树莓派边缘盒子+PLC,10分钟缺陷检测小案例。新手照着做10分钟就能跑起来,老手一看就知道这玩意儿省了多少钱。以前想上AI检测,得花几万块买专业边缘盒子;现在?树莓派5(RPi 5)…...

多模型聚合平台如何助力网站AIB测试与选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型聚合平台如何助力网站AIB测试与选型 对于网站产品经理而言,首页文案的生成质量直接影响用户的第一印象和转化率。…...

3大技术突破:重新定义Switch游戏安装性能极限
3大技术突破:重新定义Switch游戏安装性能极限 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer Awoo Installer是一款专为破解版Nintendo…...

3步开启Windows 11安卓应用新体验:WSA完整使用指南
3步开启Windows 11安卓应用新体验:WSA完整使用指南 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA Windows Subsystem for Android(简…...