【剑指offer】24. 机器人的运动范围(java选手)
题目链接
题目链接
题目描述
地上有一个 m 行和 n列的方格,横纵坐标范围分别是 0∼m−1 和 0∼n−1。
一个机器人从坐标 (0,0) 的格子开始移动,每一次只能向左,右,上,下四个方向移动一格。
但是不能进入行坐标和列坐标的数位之和大于 k 的格子。
请问该机器人能够达到多少个格子?
注意:
0<=m<=50
0<=n<=50
0<=k<=100
样例1 输入:k=7, m=4, n=5 输出:20
样例2 输入:k=18, m=40, n=40 输出:1484
解释:当k为18时,机器人能够进入方格(35,37),因为3+5+3+7 = 18。
但是,它不能进入方格(35,38),因为3+5+3+8 = 19。
题目考察知识点
图论!
深搜or光搜
当前节点可以达到的节点为上下左右四个方向
解题代码
深搜dfs
递归实现
class Solution {// 深度优先// 在确定完是否满足条件后,[先加结果,然后标为已走],然后再进行dfsint result;// 可以走的方向int dir[][] = {{-1,0},{1,0},{0,1},{0,-1}};public int movingCount(int threshold, int rows, int cols){// 判断临界情况,也就是rows和cols都为0if(rows == 0 || cols == 0){return 0;}// 判断是否走过boolean[][] used = new boolean[rows][cols];result = 0;// 判断0,0是否符合条件if(!judge(0,0,threshold)) return 0;result ++;used[0][0] = true;dfs(0, 0, rows, cols, threshold, used);return result;}// 深度优先public void dfs(int inow, int jnow, int rows, int cols, int threshold, boolean[][] used){for(int i = 0; i < 4; i ++){int inext = inow + dir[i][0];int jnext = jnow + dir[i][1];if(inext >= 0 && inext < rows && jnext >=0 && jnext < cols){// 满足条件,才进行下一个dfsif(used[inext][jnext]==false && judge(inext, jnext, threshold)){result ++;used[inext][jnext] = true;dfs(inext, jnext, rows, cols, threshold, used);}}}}// 是否满足条件public boolean judge(int i, int j, int threshold){int now = 0;while(i != 0){now += i % 10;i = i / 10;}while(j != 0){now += j % 10;j = j / 10;}// 不满足if(now > threshold){return false;}else{return true;}}
}
注意注意!!!
- used数组是必须要有的!标识一下当前哪些格子被判断过了
- 判断临界条件
- 特别是!哪个rows和cols都为0的情况
- 判断完是否符合条件再去进行dfs更容易
广搜bfs
队列实现
队列不为空的时候一直循环
符合条件的进入队列
class Solution {// 广度优先// 在确定完是否满足条件后,[先加结果,然后标为已走],然后再进队列int result;// 可以走的方向int dir[][] = {{-1,0},{1,0},{0,1},{0,-1}};public int movingCount(int threshold, int rows, int cols){// 判断临界情况,也就是rows和cols都为0if(rows == 0 || cols == 0){return 0;}// 判断是否走过boolean[][] used = new boolean[rows][cols];result = 0;bfs(rows, cols, threshold, used);return result;}// 广度优先public void bfs(int rows, int cols, int threshold, boolean[][] used){Deque<int[]> deque = new LinkedList<>();if(judge(0, 0, threshold)){deque.push(new int[]{0, 0});used[0][0] = true;result ++;}while(!deque.isEmpty()){int[] now = deque.pop();int inow = now[0];int jnow = now[1];for(int i = 0; i < 4; i ++){int inext = inow + dir[i][0];int jnext = jnow + dir[i][1];if(inext >= 0 && inext < rows && jnext >=0 && jnext < cols){// 满足条件,才进入队列if(used[inext][jnext]==false && judge(inext, jnext, threshold)){result ++;used[inext][jnext] = true;deque.push(new int[]{inext, jnext});}}}}return;}// 是否满足条件public boolean judge(int i, int j, int threshold){int now = 0;while(i != 0){now += i % 10;i = i / 10;}while(j != 0){now += j % 10;j = j / 10;}// 不满足if(now > threshold){return false;}else{return true;}}
}
相关文章:
)
【剑指offer】24. 机器人的运动范围(java选手)
题目链接 题目链接 题目描述 地上有一个 m 行和 n列的方格,横纵坐标范围分别是 0∼m−1 和 0∼n−1。 一个机器人从坐标 (0,0) 的格子开始移动,每一次只能向左,右,上,下四个方向移动一格。 但是不能进入行坐标和列…...
CMU 10-414/714: Deep Learning Systems --hw3
实现功能 在ndarray.py文件中完成一些python array操作 我们实现的NDArray底层存储就是一个一维向量,只不过会有一些额外的属性(如shape、strides)来表明这个flat array在维度上的分布。底层运算(如加法、矩阵乘法)都…...
)
前端小白的学习之路(lessscss)
提示:less,sass&scss 目录 一、less 1.变量 2.嵌套规则 3.混合 4.针对属性值进行操作的函数 5.循环 6.拓展语法 二、scss&sass 1.sass 2.scss 一、less 是一个开源的、基于 CSS 的预处理器,它使得编写和维护 CSS 更加简单和高效。通…...
)
算法体系-15 第十五节:贪心算法(下)
一 、贪心算法的解题套路实战 贪心的算法和排序和堆有关 1.1 描述 一些项目要占用一个会议室宣讲,会议室不能同时容纳两个项目的宣讲。 给你每一个项目开始的时间和结束的时间 你来安排宣讲的日程,要求会议室进行的宣讲的场次最多。 返回最多的宣讲场次…...

2.10 模型评估的方法有哪些?优缺点
2.10 模型评估的方法有哪些?优缺点? 场景描述 在机器学习中,我们通常把样本分为训练集和测试集,训练集用于训练模型,测试集用于评估模型。在样本划分和模型验证的过程中,存在着不同的抽样方法和验证方法。…...

Linux centos7安装nginx-1.24.0并且实现自启动
1.安装之前的操作 ps -ef|grep nginx 查看是否有运行 如果有就杀掉 kill -9 pid find / -name nginx 查看nginx文件 rm -rf file /usr/local/nginx* 通通删掉删掉 yum remove nginx 限载一下服务 1.2.下载安装包 地址 nginx: download 2.减压文件 tar…...
)
001-Windows下PyTorch极简开发环境配置(上)
本节介绍Windows系统下配置一套基于Pytorch框架的极简深度学习开发环境。 目录 0.1 缘起 0.1 缘起 其实大概在2016就开始接触深度学习的相关知识,但一直到2018年左右,还停留在门外汉的状态太,原因很简单,感觉学习的门槛过高。…...
分布式Raft原理详解,从不同角色视角分析相关状态
分布式Raft原理详解,从不同角色视角分析相关状态 1. CAP定理2.Raft 要解决的问题3. Raft的核心逻辑3.1. Raft的核心逻辑2.1. 复制状态机2.2. 任期 Term2.3. 任期的意义:逻辑时钟2.4 选举定时器 3. Leader选举逻辑4. 从节点视角查看Leader选举4.1. Follow…...

大数据的实时计算和离线计算你理解吗?
不管是实时计算还是离线计算,都有着同样的业务目标,那就是根据业务要求把数据源计算处理成业务需要的直接可用的数据结果。 如果把数据源比作是水龙头里的水,把数据计算比作是生产纯净水的过程;那么实时计算就是用一根水管接在水龙…...

OS Package Manager
Windows Package Manager winget chocolatey Mac homebrew Linux apt-get apt snap yum 使用wget和curl拉取相关工具的shell脚本执行安装...
【滑动窗口、矩阵】算法例题
目录 三、滑动窗口 30. 长度最小的子数组 ② 31. 无重复字符的最长子串 ② 32. 串联所有单词的子串 ③ 33. 最小覆盖子串 ③ 四、矩阵 34. 有效的数独 ② 35. 螺旋矩阵 ② 36. 旋转图像 ② 37. 矩阵置零 ② 38. 生命游戏 ② 三、滑动窗口 30. 长度最小的子数组 ② 给…...
【事务】开发用到的事务,TransactionDefinition实例详解,事务的传播机制
【事务】开发中用到的事务,TransactionDefinition实例详解 一、TransactionDefinition 介绍1、隔离级别(Isolation Level):2、传播行为(Propagation Behavior):3、超时设置(Timeout …...

Linux信号处理
Linux信号处理 什么是linux信号 本质是一种通知机制,用户 or 操作系统通过发送一定的信号,通知进程,某些事情已经发生,你可以在后续进行处理。 信号产生是随机的,进程可能正在忙自己的事情,所以…...

nuclei使用方法
nuclei使用方法 查看帮助 nuclei -h 列出所有模板 nuclei -tl 查找某种cms的相关漏洞模板,wordpress为例 nuclei -tl -tc "contains(name,wordpress)"便会列出内容里含有wordpress关键字的漏洞检测模板 使用与某cms相关的所有漏洞模板进行扫描&#…...
【并查集专题】【蓝桥杯备考训练】:网络分析、奶酪、合并集合、连通块中点的数量、格子游戏【已更新完成】
目录 1、网络分析(第十一届蓝桥杯省赛第一场C A组/B组) 2、奶酪(NOIP2017提高组) 3、合并集合(模板) 4、连通块中点的数量(模板) 5、格子游戏(《信息学奥赛一本通》…...
数据结构(三)复杂度的深层次剖析
之前发布了数据结构(一),很多同学反响不够清晰,那今天就发一篇对复杂度专题的博客,希望对大家理解复杂度提供一些帮助。 时间复杂度 我们先来一个理解一个复杂度,二分查找的复杂度(之前写过二…...
JavaWeb -- HTTP -- WEB服务器TOMCAT
一.HTTP介绍: HTTP(Hyper Text Protocol) 实际上是一种超文本传输的协议,规定了浏览器跟服务器之间的一些数据传输的规则 例如B/S 对于浏览器的请求,以及相应服务器的响应,都必须依靠这种协议,规范,才能够彼此之间相互 理解 HTTP的协议特点: 1.基于TCP协议: 面向连接 更加安全…...

GitHub与Git命令使用笔记
GitHub与Git命令使用笔记 文章目录 GitHub与Git命令使用笔记上传本地的新项目到github1. 创建新的GitHub仓库2. 初始化本地项目目录3. 将本地仓库关联到GitHub4. 推送本地代码到GitHub上传本地项目到GitHub时发生冲突 将默认分支名称从master改为maingit 把远程项目拉到本地&am…...
二叉树的层次遍历经典问题-算法通关村
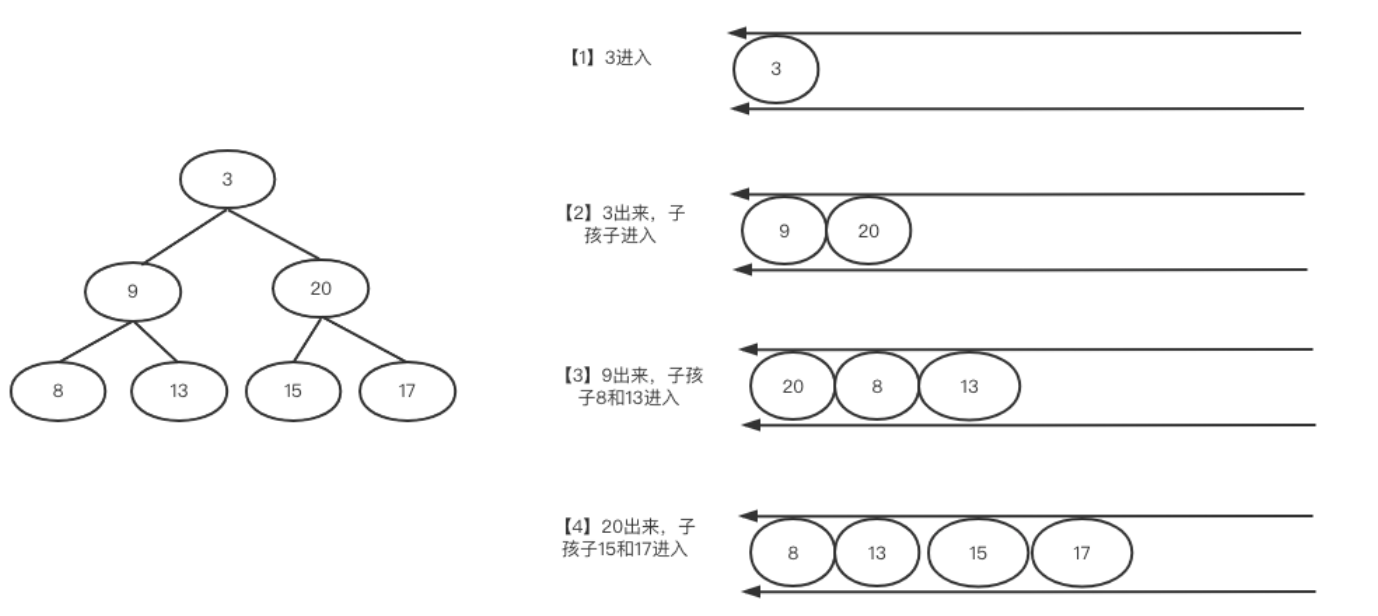
二叉树的层次遍历经典问题-算法通关村 1 层次遍历简介 广度优先在面试里出现的频率非常高,整体属于简单题。广度优先又叫层次遍历,基本过程如下: 层次遍历就是从根节点开始,先访问根节点下面一层全部元素,再访问之后…...

SQLiteC/C++接口详细介绍sqlite3_stmt类(十二)
返回:SQLite—系列文章目录 上一篇:SQLiteC/C接口详细介绍sqlite3_stmt类(十一) 下一篇: SQLiteC/C接口详细介绍sqlite3_stmt类(十三) 48、sqlite3_stmt_isexplain sqlite3_stmt_is…...

Taurus多执行器对比实战:JMeter/Gatling/Locust统一压测方案
1. 为什么选Taurus做多执行器对比——不是为了炫技,而是为了少踩坑在性能测试领域,我见过太多团队卡在“选型”这一步:刚招来一个会写JMeter脚本的工程师,项目突然要压测WebSocket接口,发现JMeter原生支持弱、插件维护…...

从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器
从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器计算流体力学(CFD)的魅力在于它将抽象的数学方程转化为可执行的代码,让流体运动的奥秘在计算机中重现。对于已经掌握流体力学理论的中高级学习者来说&am…...

政企数据安全:危机与出路
随着数字化转型的浪潮席卷全球,公共部门积累的数据量呈爆炸式增长。从公民个人信息到公共服务记录,从财政预算到基础设施管理数据——这些宝贵资源在提升政府治理效率的同时,也悄然成为网络犯罪分子的“新猎物”。当公共数据逐渐成为数字时代…...

鸿蒙系统微博应用锁常见问题解答
为微博设置应用锁后,不少用户会有各种疑问:忘记密码怎么办?会不会影响消息推送?能不能只锁定某些功能?应用锁耗电吗?本文将针对这些高频问题逐一解答,帮助您更好地使用鸿蒙系统(Harm…...

光效崩坏?噪点泛滥?色温漂移?——Midjourney专业级光效渲染全流程校准协议,含ACEScg色彩空间适配模板
更多请点击: https://kaifayun.com 第一章:光效崩坏、噪点泛滥与色温漂移的系统性归因诊断 图像采集链路中出现的光效崩坏、噪点泛滥与色温漂移并非孤立现象,而是光学设计、传感器响应、ISP管线调度及环境耦合失配共同作用的结果。三者常呈现…...

2026年一键生成论文工具对比实测:5款神器从选题到格式全流程护航
写论文的焦虑,是每个科研人和学生都心照不宣的“隐形压力”。选题无从下手,文献检索耗时费力,逻辑框架反复推翻,格式排版让人抓狂,查重降重更是像在和系统玩“猫鼠游戏”。2026年的AI工具早已不是过去那种“打字机”&a…...

保姆级教程:在Windows 10上用QEMU+Kylin搭建可内外网访问的完整开发环境
在Windows 10上构建QEMUKylin全功能开发环境的终极指南当开发者需要在本地快速搭建一个隔离的国产操作系统开发环境时,QEMU虚拟化方案配合银河麒麟系统能提供高度灵活的沙箱体验。本文将手把手带你完成从零配置到内外网联通的完整工作流,涵盖虚拟化环境部…...

NanaZip:现代Windows文件压缩问题的终极解决方案
NanaZip:现代Windows文件压缩问题的终极解决方案 【免费下载链接】NanaZip The 7-Zip derivative intended for the modern Windows experience 项目地址: https://gitcode.com/gh_mirrors/na/NanaZip 还在为Windows文件压缩工具界面老旧、功能单一而烦恼吗&…...

Redis 客户端连接详解
Redis 客户端连接详解 引言 Redis 是一款高性能的内存数据结构存储系统,常用于缓存、会话管理、实时排行榜等功能。客户端连接是 Redis 生态系统中的重要组成部分,本文将详细介绍 Redis 客户端连接的相关知识,包括连接方式、连接配置、连接管理等方面。 Redis 客户端连接…...

3步零基础掌握星露谷物语SMAPI模组加载器:高效管理你的模组世界
3步零基础掌握星露谷物语SMAPI模组加载器:高效管理你的模组世界 【免费下载链接】SMAPI The modding API for Stardew Valley. 项目地址: https://gitcode.com/gh_mirrors/smap/SMAPI SMAPI(Stardew Valley Modding API)是星露谷物语官…...