[医学分割大模型系列] (3) SAM-Med3D 分割大模型详解
[医学分割大模型系列] -3- SAM-Med3D 分割大模型解析
- 1. 特点
- 2. 背景
- 3. 训练数据集
- 3.1 数据集收集
- 3.2 数据清洗
- 3.3 模型微调数据集
- 4. 模型结构
- 4.1 3D Image Encoder
- 4.2 3D Prompt Encoder
- 4.3 3D mask Decoder
- 4.4 模型权重
- 5. 评估
- 5.1 评估数据集
- 5.2 Quantitative Evaluation
- 5.3 可视化
- 6. 结论
论文地址:SAM-Med3D
开源地址:https://github.com/uni-medical/SAM-Med3D
发表日期:2023年10月
参考资料:
- 王皓宇(上海交通大学)SAM-Med3D基于SAM构建3D医学影像通用分割模型
- SAM-Med3D:三维医学图像上的通用分割模型,医疗版三维 SAM 开源了!
- SAM-Med3D (SJTU 2024)
1. 特点
- 通用分割能力:在各种3D目标上精准分割,效果明显优于SAM,SAM-Med2D(相对于切片进行2D分割)
- 更高的效率:比现有通用分割模型更快,提示需求更少(相对于切片进行2D分割)
- 迁移能力:作为预训练模型,在多个任务上效果良好
- 模型输入:要分割的图像和一个/几个提示点(提示点越多,效果越好)
- 模型输出:分割结果
- 数据集:SAM-Med3D-130K数据集,拥有 131K 3D mask和 247 个类别
- 网络结构:类SAM,将结构换成3D版本
- 分割对象:3D医学图像
2. 背景
- 3D医学图像:体素形式的3D图像和标注,以不同分布的灰度图像为主
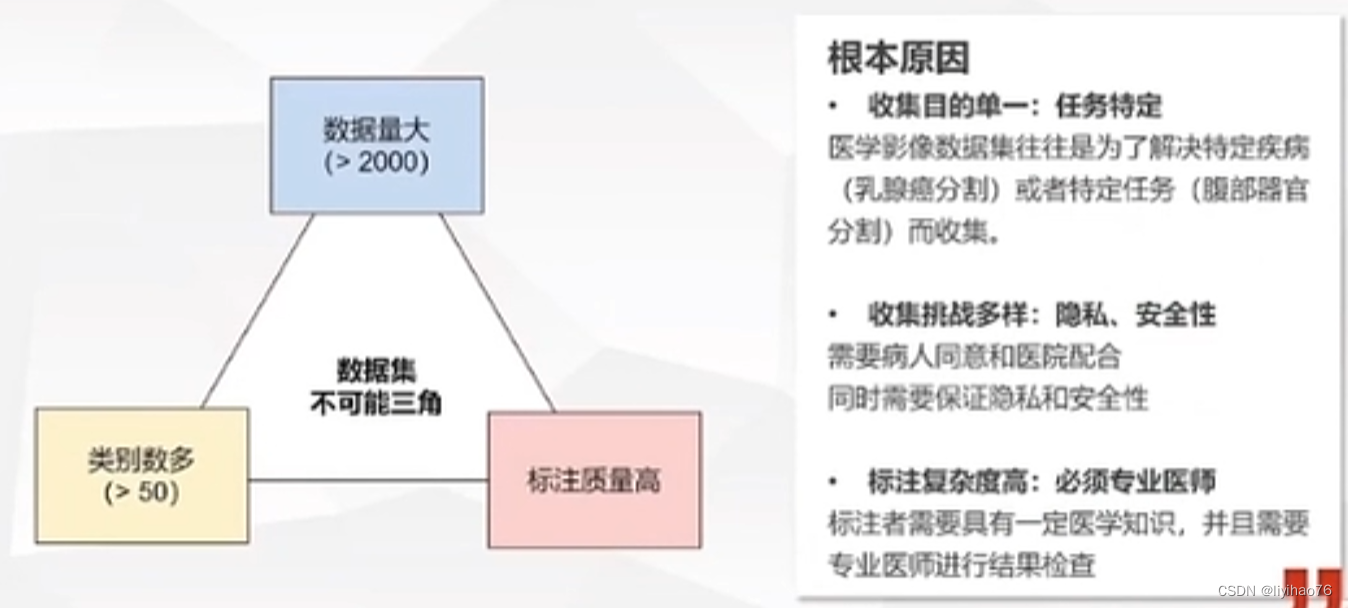
- 任务特定模型的局限:
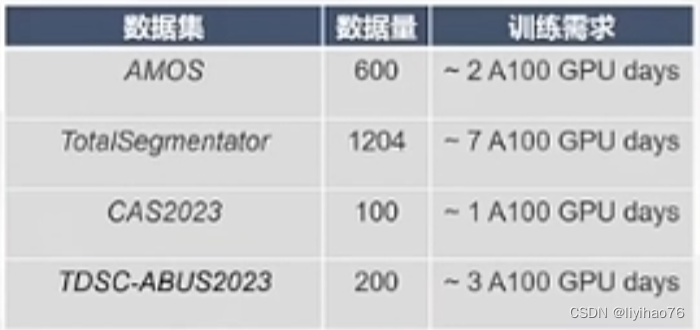
- 沉重的训练负担:使用U-Net,UNETR等分割网络在医学数据集上训练,使用A100也需要2-7天
- 泛化性弱
使用特定数据集训练出来的模型(左列)在其他数据集上的表现(行)不佳

- 沉重的训练负担:使用U-Net,UNETR等分割网络在医学数据集上训练,使用A100也需要2-7天
- SAM在3D医学分割的局限:
- 由于医学图像知识的严重不足,将 SAM 直接应用于医学领域的有效性有限。解决这个问题的一种直接的方法是:将医学知识融入到 SAM 中。比如,MedSAM 是一种典型示例,它通过使用110万个掩码(mask)对SAM 的解码器(Mask Decoder)进行微调,从而使 SAM 能够通过边界框(Bounding Box)作为提示来更好地分割医学影像;SAM-Med2D 则引入了适配器(Adapter)和约2000万个掩码(mask)对 SAM 进行了充分微调,从而在医学图像分割中表现出了卓越的性能。
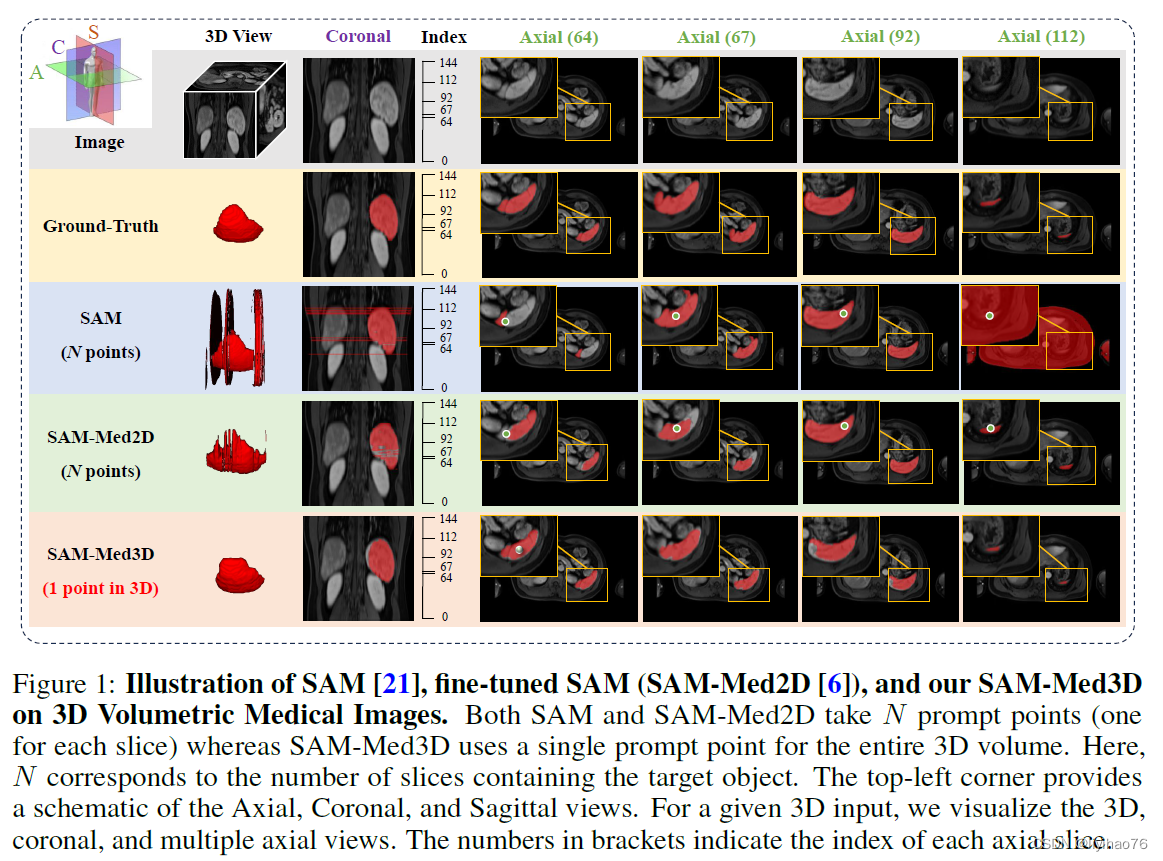
- 然而,这些方法必须采用逐切片(slice)的方法来处理三维医学图像,也即,将三维数据从某个维度分解为二维切片,然后独立处理每个切片,最后将二维分割结果汇总为三维分割结果。这种方法忽略了切片之间的三维空间信息,因此在三维医学影像上表现不佳,这一问题可以从上图中的结果看出。SAM和SAM-Med2D都是一张张切片进行分割,每张切片都需要一个提示,所以总共需要N个提示。对于一些切片,他们的表现不佳,从而导致空间信息的不连贯。
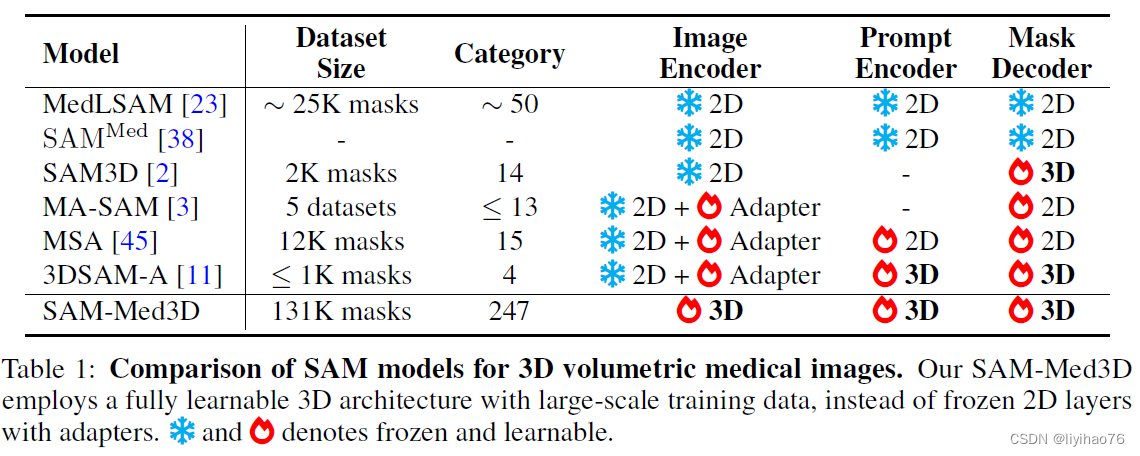
- 除了将 SAM 直接应用于三维数据,一些研究人员希望通过引入二维到三维的适配器(Adapter)来捕捉三维空间信息。这些方法通常在保持编码器(Image Encoder)不变的同时引入了三维适配器(Adapter),以使模型能够从三维图像中学习到三维空间信息。然而,这些方法存在两个主要限制:(1)数据规模有限:这些方法的模型通常只在有限的数据规模下进行训练(通常在1K到25K个mask范围内),并且只针对有限的目标类型。这限制了模型的泛化性能和适用范围。(2)冻结的二维编码器:现有的三维 SAM-based 模型一直坚守着冻结原始二维 SAM 编码器(Image Encoder)的设计范式,这限制了模型全面建模三维空间信息的能力,大大限制了 SAM 在三维医学图像处理领域的发展潜力。
3. 训练数据集
3.1 数据集收集
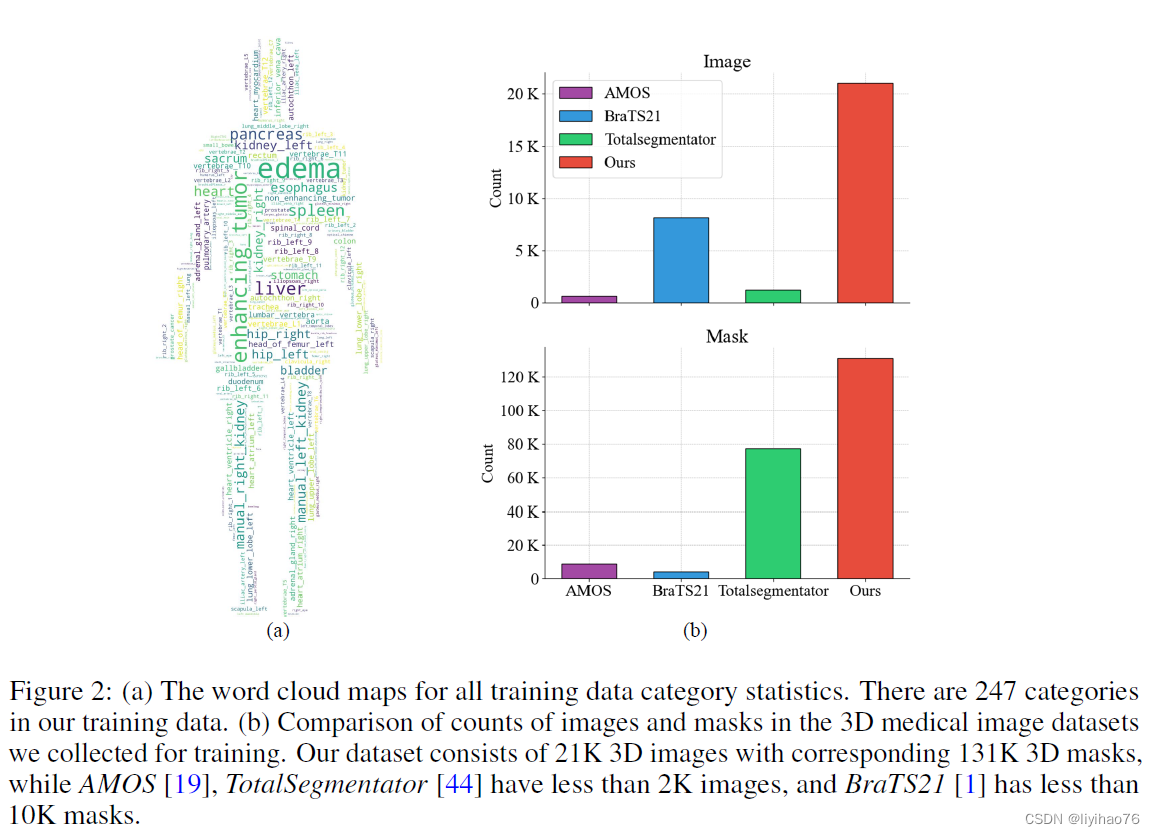
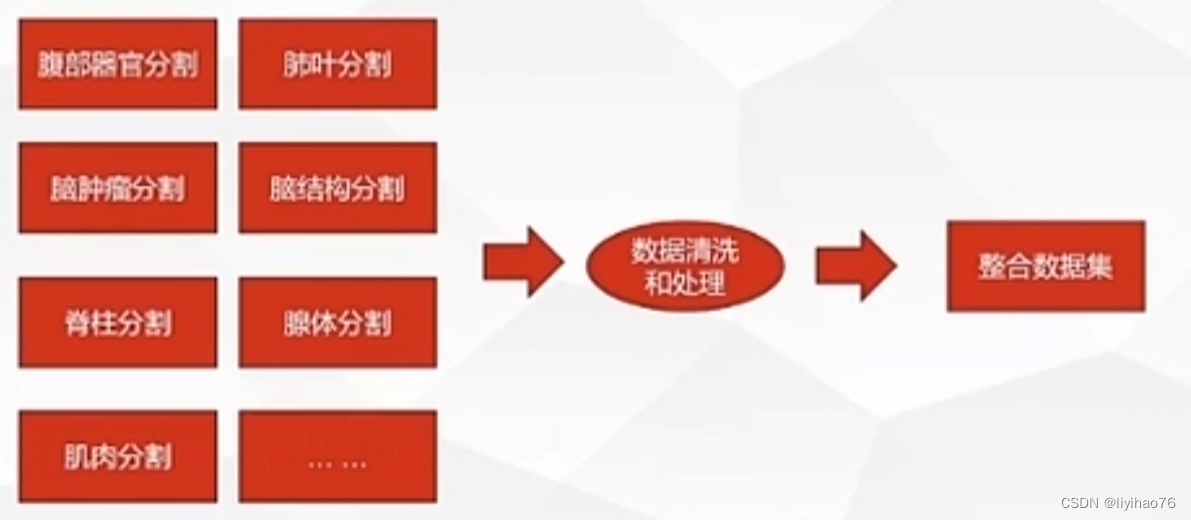 作者进行了三维医学图像数据集的广泛收集和标准化工作,整合了116个公开和私有的三维医学图像数据集,经过4轮数据筛选和清晰,创建了迄今为止规模最大的三维医学图像分割数据集。该数据集包含了 2.1 万个三维医学图像(病人数量)和 13.1 万个三维掩码(mask)。从下表可以清晰地看出,这一数据集的规模远远超过了现有最大的三维医学图像分割数据集,如 TotalSegmentator 和 BraTS21,其规模扩大了 10 倍以上。
作者进行了三维医学图像数据集的广泛收集和标准化工作,整合了116个公开和私有的三维医学图像数据集,经过4轮数据筛选和清晰,创建了迄今为止规模最大的三维医学图像分割数据集。该数据集包含了 2.1 万个三维医学图像(病人数量)和 13.1 万个三维掩码(mask)。从下表可以清晰地看出,这一数据集的规模远远超过了现有最大的三维医学图像分割数据集,如 TotalSegmentator 和 BraTS21,其规模扩大了 10 倍以上。
该数据集涵盖 27 种模态(CT 和 26 种MRI 序列)和 7 种解剖结构。如下图所⽰,共涵盖了 247 个不同的类别,包括器官和病变。
3.2 数据清洗
四步数据清洗:
- 基于元信息的数据清理 我们首先总结了所收集数据的元信息,包括每张医学影像的深度、宽度和高度。我们删除了所有物理尺寸小于 1 立方厘米或任何单个尺寸小于 1.5 厘米的病例,以确保目标mask的可见性。
- 基于连接域的掩码清理 在计算连通域的过程中,我们首先将原始的多类mask分割成多个类别的单击格式。然后,我们计算每个单击掩码的前 5 个最大连通域的大小和背景。根据这些掩码的汇总信息,我们会删除背景占整个体积 99% 以上的mask。
- 基于连接域的标签质量改进 对于过滤后的mask,我们设计了一个基于连接域的pipeline来提高标签质量。根据每个mask的前 5 个最大连通域的汇总信息,我们只需删除小于这 5 个连通域的任何其他域,以减少噪音。
- 基于对称性的标签质量改进 最后,我们将一些对称目标的mask拆分为不同类别的成对mask。例如,我们将 "肾 "的mask分为 "左肾 "和 “右肾”。这一步的目的是加强不同类别mask的语义一致性,防止模型分不清是分割整个结构还是只分割单个的左右部分。为了解决这个问题,SAM 为每个提示生成多个预测,并采用额外的头部生成分数,以方便选择最合适的预测。鉴于医学图像的mask通常不那么模糊,我们选择直接处理数据来消除这种模糊性,从而增强mask类别之间的语义一致性,降低网络训练的复杂性。
3.3 模型微调数据集
目前SAM-Med3D-turbo是现已发布经过微调的 SAM-Med3D 的最新版本checkpoint。在SAM-Med3D的基础上又在 44 个数据集 ( 以下list )上对其进行了微调以提高性能。
AMOS2022
ATM2022
AbdomenCT1K
BTCV_Cervix
BraTS2020
BraTS2021
BrainTumour
Brain_PTM
CAUSE07
CHAOS_Task_4
COSMOS2022
COVID19CTscans
CTPelvic1k
CT_ORG
FLARE21
FLARE22
Heart_Seg_MRI
ISLES_SISS
ISLES_SPES
KiPA22
KiTS
KiTS2021
LAScarQS22_task1
LAScarQS22_task2
LITS
MMWHS
MSD_Colon
MSD_HepaticVessel
MSD_Liver
MSD_Pancreas
MSD_Prostate
MSD_Spleen
PROMISE12
Parse22
Promise09
Prostate_MRI_Segmentation_Dataset
SLIVER07
STACOM_SLAWT
SegThor
Totalsegmentator_dataset
VESSEL2012
VerSe19
VerSe20
WORD
4. 模型结构
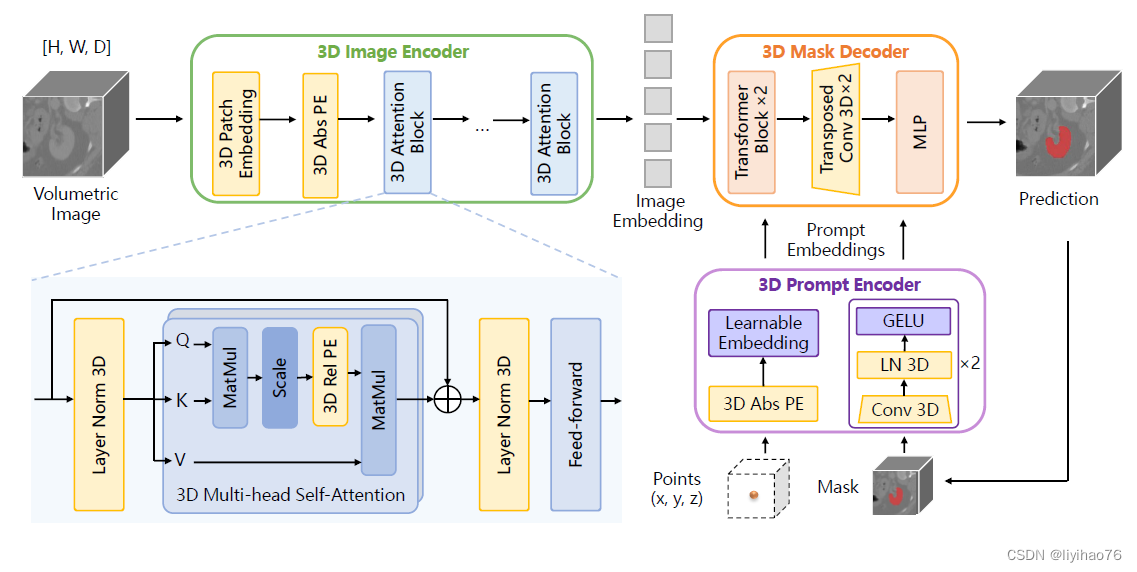
基于SAM修改后SAM-Med3D 的 3D 架构。 原始2D组件被转换为3D对应组件,包括3D Image Encoder、3D Prompt Encoder 和3D mask Decoder。采用3D卷积、3D位置编码(PE)和3D layer norm来构建3D模型。
4.1 3D Image Encoder
在 3D 图像编码器中,首先使用内核大小为 (16, 16, 16) 的 3D 卷积嵌入块生成embedding,并与可学习的 3D 绝对位置编码 absolute Positional Encoding (PE) 配对。 这种编码是通过自然地将附加维度扩展到 SAM 的 2D PE 来获得的。 然后将补丁的嵌入输入到 3D 注意力块中。 对于 3D 注意力模块,我们将 3D 相关 PE 合并到 SAM 的多头自注意力(MHSA)模块中,使其能够直接捕获空间细节。
class PatchEmbed3D(nn.Module):"""Image to Patch Embedding."""def __init__(self,kernel_size: Tuple[int, int] = (16, 16, 16),stride: Tuple[int, int] = (16, 16, 16),padding: Tuple[int, int] = (0, 0, 0),in_chans: int = 1,embed_dim: int = 768,) -> None:"""Args:kernel_size (Tuple): kernel size of the projection layer.stride (Tuple): stride of the projection layer.padding (Tuple): padding size of the projection layer.in_chans (int): Number of input image channels.embed_dim (int): Patch embedding dimension."""super().__init__()self.proj = nn.Conv3d(in_chans, embed_dim, kernel_size=kernel_size, stride=stride, padding=padding)def forward(self, x: torch.Tensor) -> torch.Tensor:x = self.proj(x)# B C X Y Z -> B X Y Z Cx = x.permute(0, 2, 3, 4, 1)return x
class Attention(nn.Module):"""Multi-head Attention block with relative position embeddings."""def __init__(self,dim: int,num_heads: int = 8,qkv_bias: bool = True,use_rel_pos: bool = False,rel_pos_zero_init: bool = True,input_size: Optional[Tuple[int, int, int]] = None,) -> None:"""Args:dim (int): Number of input channels.num_heads (int): Number of attention heads.qkv_bias (bool): If True, add a learnable bias to query, key, value.rel_pos (bool): If True, add relative positional embeddings to the attention map.rel_pos_zero_init (bool): If True, zero initialize relative positional parameters.input_size (tuple(int, int) or None): Input resolution for calculating the relativepositional parameter size."""super().__init__()self.num_heads = num_headshead_dim = dim // num_headsself.scale = head_dim**-0.5self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.proj = nn.Linear(dim, dim)self.use_rel_pos = use_rel_posif self.use_rel_pos:assert (input_size is not None), "Input size must be provided if using relative positional encoding."# initialize relative positional embeddingsself.rel_pos_d = nn.Parameter(torch.zeros(2 * input_size[0] - 1, head_dim))self.rel_pos_h = nn.Parameter(torch.zeros(2 * input_size[1] - 1, head_dim))self.rel_pos_w = nn.Parameter(torch.zeros(2 * input_size[2] - 1, head_dim))def forward(self, x: torch.Tensor) -> torch.Tensor:B, D, H, W, _ = x.shape# qkv with shape (3, B, nHead, H * W, C)qkv = self.qkv(x).reshape(B, D * H * W, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)# q, k, v with shape (B * nHead, H * W, C)q, k, v = qkv.reshape(3, B * self.num_heads, D * H * W, -1).unbind(0)attn = (q * self.scale) @ k.transpose(-2, -1)if self.use_rel_pos:attn = add_decomposed_rel_pos(attn, q, self.rel_pos_d, self.rel_pos_h, self.rel_pos_w, (D, H, W), (D, H, W))attn = attn.softmax(dim=-1)x = (attn @ v).view(B, self.num_heads, D, H, W, -1).permute(0, 2, 3, 4, 1, 5).reshape(B, D, H, W, -1)x = self.proj(x)return x
4.2 3D Prompt Encoder
在提示编码器中,稀疏提示利用 3D 位置编码来表示 3D 空间细微差别,而密集提示则通过 3D 卷积进行处理。
class PromptEncoder3D(nn.Module):def __init__(self,embed_dim: int,image_embedding_size: Tuple[int, int, int],input_image_size: Tuple[int, int, int],mask_in_chans: int,activation: Type[nn.Module] = nn.GELU,) -> None:"""Encodes prompts for input to SAM's mask decoder.Arguments:embed_dim (int): The prompts' embedding dimensionimage_embedding_size (tuple(int, int)): The spatial size of theimage embedding, as (H, W).input_image_size (int): The padded size of the image as inputto the image encoder, as (H, W).mask_in_chans (int): The number of hidden channels used forencoding input masks.activation (nn.Module): The activation to use when encodinginput masks."""super().__init__()self.embed_dim = embed_dimself.input_image_size = input_image_sizeself.image_embedding_size = image_embedding_sizeself.pe_layer = PositionEmbeddingRandom3D(embed_dim // 3)self.num_point_embeddings: int = 2 # pos/neg pointpoint_embeddings = [nn.Embedding(1, embed_dim) for i in range(self.num_point_embeddings)]self.point_embeddings = nn.ModuleList(point_embeddings)self.not_a_point_embed = nn.Embedding(1, embed_dim)self.mask_input_size = (image_embedding_size[0], image_embedding_size[1], image_embedding_size[2])self.mask_downscaling = nn.Sequential(nn.Conv3d(1, mask_in_chans // 4, kernel_size=2, stride=2),LayerNorm3d(mask_in_chans // 4),activation(),nn.Conv3d(mask_in_chans // 4, mask_in_chans, kernel_size=2, stride=2),LayerNorm3d(mask_in_chans),activation(),nn.Conv3d(mask_in_chans, embed_dim, kernel_size=1),)self.no_mask_embed = nn.Embedding(1, embed_dim)def get_dense_pe(self) -> torch.Tensor:"""Returns the positional encoding used to encode point prompts,applied to a dense set of points the shape of the image encoding.Returns:torch.Tensor: Positional encoding with shape1x(embed_dim)x(embedding_h)x(embedding_w)"""return self.pe_layer(self.image_embedding_size).unsqueeze(0) # 1xXxYxZdef _embed_points(self,points: torch.Tensor,labels: torch.Tensor,pad: bool,) -> torch.Tensor:"""Embeds point prompts."""points = points + 0.5 # Shift to center of pixelif pad:padding_point = torch.zeros((points.shape[0], 1, 3), device=points.device)padding_label = -torch.ones((labels.shape[0], 1), device=labels.device)points = torch.cat([points, padding_point], dim=1)labels = torch.cat([labels, padding_label], dim=1)point_embedding = self.pe_layer.forward_with_coords(points, self.input_image_size)point_embedding[labels == -1] = 0.0point_embedding[labels == -1] += self.not_a_point_embed.weightpoint_embedding[labels == 0] += self.point_embeddings[0].weightpoint_embedding[labels == 1] += self.point_embeddings[1].weightreturn point_embeddingdef _embed_boxes(self, boxes: torch.Tensor) -> torch.Tensor:"""Embeds box prompts."""boxes = boxes + 0.5 # Shift to center of pixelcoords = boxes.reshape(-1, 2, 2)corner_embedding = self.pe_layer.forward_with_coords(coords, self.input_image_size)corner_embedding[:, 0, :] += self.point_embeddings[2].weightcorner_embedding[:, 1, :] += self.point_embeddings[3].weightreturn corner_embeddingdef _embed_masks(self, masks: torch.Tensor) -> torch.Tensor:"""Embeds mask inputs."""mask_embedding = self.mask_downscaling(masks)return mask_embeddingdef _get_batch_size(self,points: Optional[Tuple[torch.Tensor, torch.Tensor]],boxes: Optional[torch.Tensor],masks: Optional[torch.Tensor],) -> int:"""Gets the batch size of the output given the batch size of the input prompts."""if points is not None:return points[0].shape[0]elif boxes is not None:return boxes.shape[0]elif masks is not None:return masks.shape[0]else:return 1def _get_device(self) -> torch.device:return self.point_embeddings[0].weight.devicedef forward(self,points: Optional[Tuple[torch.Tensor, torch.Tensor]],boxes: Optional[torch.Tensor],masks: Optional[torch.Tensor],) -> Tuple[torch.Tensor, torch.Tensor]:"""Embeds different types of prompts, returning both sparse and denseembeddings.Arguments:points (tuple(torch.Tensor, torch.Tensor) or none): point coordinatesand labels to embed.boxes (torch.Tensor or none): boxes to embedmasks (torch.Tensor or none): masks to embedReturns:torch.Tensor: sparse embeddings for the points and boxes, with shapeBxNx(embed_dim), where N is determined by the number of input pointsand boxes.torch.Tensor: dense embeddings for the masks, in the shapeBx(embed_dim)x(embed_H)x(embed_W)"""bs = self._get_batch_size(points, boxes, masks)sparse_embeddings = torch.empty((bs, 0, self.embed_dim), device=self._get_device())if points is not None:coords, labels = pointspoint_embeddings = self._embed_points(coords, labels, pad=(boxes is None))sparse_embeddings = torch.cat([sparse_embeddings, point_embeddings], dim=1)if boxes is not None:box_embeddings = self._embed_boxes(boxes)sparse_embeddings = torch.cat([sparse_embeddings, box_embeddings], dim=1)if masks is not None:dense_embeddings = self._embed_masks(masks)else:dense_embeddings = self.no_mask_embed.weight.reshape(1, -1, 1, 1, 1).expand(bs, -1, self.image_embedding_size[0], self.image_embedding_size[1], self.image_embedding_size[2])return sparse_embeddings, dense_embeddings
4.3 3D mask Decoder
3D mask Decoder与 3D 上采样集成,采用 3D 转置卷积。
class TwoWayAttentionBlock3D(nn.Module):def __init__(self,embedding_dim: int,num_heads: int,mlp_dim: int = 2048,activation: Type[nn.Module] = nn.ReLU,attention_downsample_rate: int = 2,skip_first_layer_pe: bool = False,) -> None:"""A transformer block with four layers: (1) self-attention of sparseinputs, (2) cross attention of sparse inputs to dense inputs, (3) mlpblock on sparse inputs, and (4) cross attention of dense inputs to sparseinputs.Arguments:embedding_dim (int): the channel dimension of the embeddingsnum_heads (int): the number of heads in the attention layersmlp_dim (int): the hidden dimension of the mlp blockactivation (nn.Module): the activation of the mlp blockskip_first_layer_pe (bool): skip the PE on the first layer"""super().__init__()self.self_attn = Attention(embedding_dim, num_heads)self.norm1 = nn.LayerNorm(embedding_dim)self.cross_attn_token_to_image = Attention(embedding_dim, num_heads, downsample_rate=attention_downsample_rate)self.norm2 = nn.LayerNorm(embedding_dim)self.mlp = MLPBlock3D(embedding_dim, mlp_dim, activation)self.norm3 = nn.LayerNorm(embedding_dim)self.norm4 = nn.LayerNorm(embedding_dim)self.cross_attn_image_to_token = Attention(embedding_dim, num_heads, downsample_rate=attention_downsample_rate)self.skip_first_layer_pe = skip_first_layer_pedef forward(self, queries: Tensor, keys: Tensor, query_pe: Tensor, key_pe: Tensor) -> Tuple[Tensor, Tensor]:# Self attention blockif self.skip_first_layer_pe:queries = self.self_attn(q=queries, k=queries, v=queries)else:q = queries + query_peattn_out = self.self_attn(q=q, k=q, v=queries)queries = queries + attn_outqueries = self.norm1(queries)# Cross attention block, tokens attending to image embeddingq = queries + query_pek = keys + key_peattn_out = self.cross_attn_token_to_image(q=q, k=k, v=keys)queries = queries + attn_outqueries = self.norm2(queries)# MLP blockmlp_out = self.mlp(queries)queries = queries + mlp_outqueries = self.norm3(queries)# Cross attention block, image embedding attending to tokensq = queries + query_pek = keys + key_peattn_out = self.cross_attn_image_to_token(q=k, k=q, v=queries)keys = keys + attn_outkeys = self.norm4(keys)return queries, keys4.4 模型权重
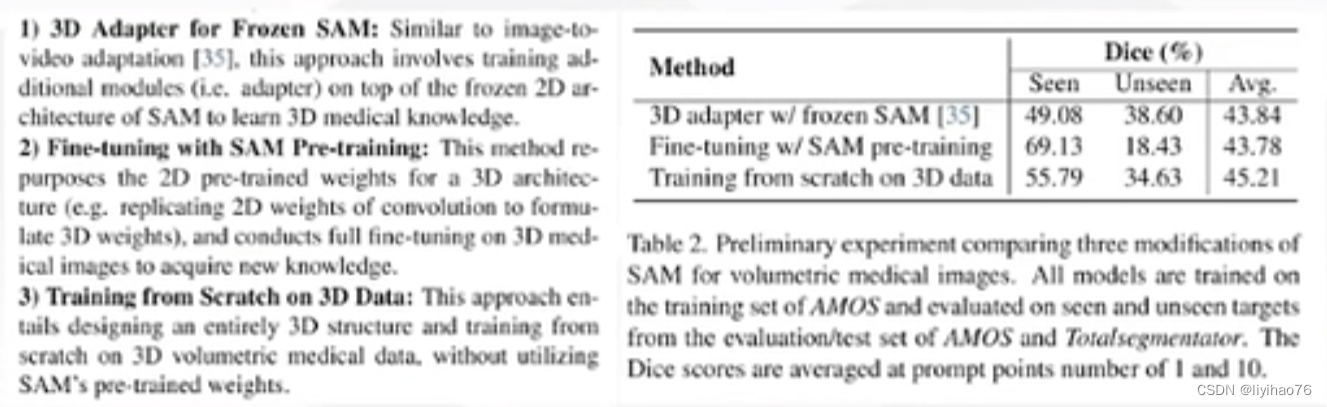
测试了三种训练策略,结果表明从头训练效果最好
- 沿用2d sam,加上3d adapter进行改造。
- 将2d sam的权重改造成 3d 结构可以使用的权重(对3d层采用权重复制策略)。 以卷积为例,我们将二维卷积的核复制D次并将它们堆叠起来形成三维卷积,其中D表示第三维中核的大小。
- 使用3d数据从头训练。
5. 评估
对于2D切片分割和3D体积分割,我们从前景中随机采样一个点作为第一个提示,并从误差区域中随机选择以下点。 值得注意的是,2D SAM 方法(SAM、SAM-Med2D)是逐片推断的,而我们的 SAM-Med3D 使用基于补丁的推断方法进行操作。 这与 nnUNet 等最先进的医学图像分割方法一致,赋予 SAM-Med3D 在推理时间方面的优势。 此外,2D方法在推断3D医学图像时对每个切片进行独立交互,而3D方法仅在体积上进行全局交互。 这意味着2D执行的交互次数实际上是3D的N倍(N表示包含对象的切片数量,通常范围为10到200)。 尽管 2D 方法采用了更多的提示点,但其固有的片间交互缺乏造成了明显的性能上限,特别是在相对复杂的 3D 结构上。
5.1 评估数据集
在评估阶段,我们选择了 13 个公共基准数据集来审查各种临床场景,并纳入了 MICCAI2023 挑战赛中的 2 个额外数据集来验证不同模型的性能。 该验证集包含七个重要的解剖结构,例如胸部和腹部器官、大脑结构、骨骼等。 它还包括医学领域非常感兴趣的五种病变类型,以及一系列体积测量模式,包括 CT、US(超声)和八个 MRI 序列。 此外,它还包含具有挑战性的、以前未见过的目标,最终形成了不同类别的 153 个不同目标。 验证集有三部分:
5.2 Quantitative Evaluation
- 整体表现
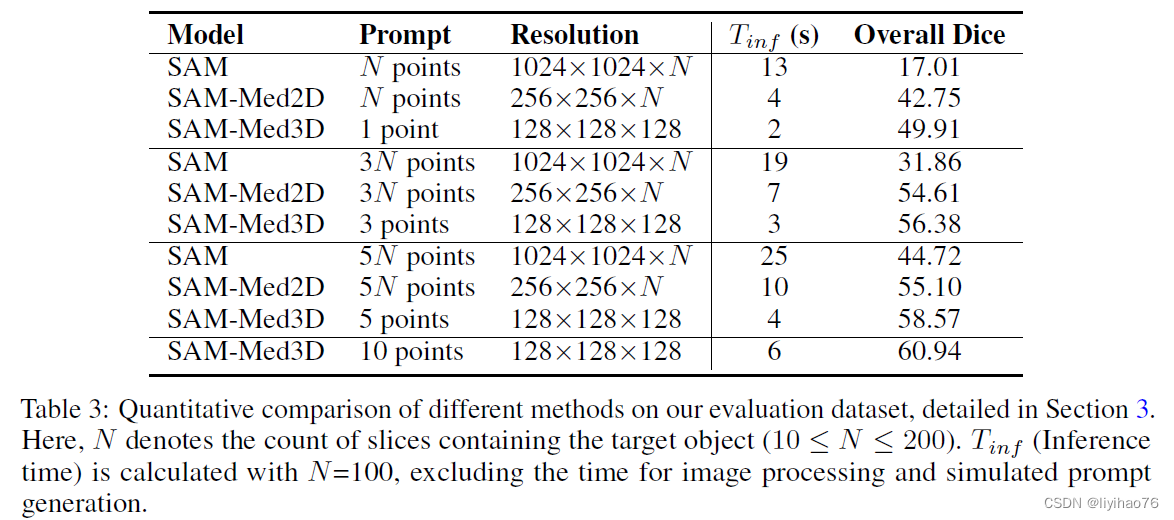
SAM-Med3D在使用更少点击次数的情况下,获得了更好的性能。N表示待分割目标包含的切片(slice)数目,通常10 ≤ N ≤ 200。 T i n f T_{inf} Tinf为N =100时所需的推理时间 (Inference time) 。
- 从解剖结构和病变角度进行评估
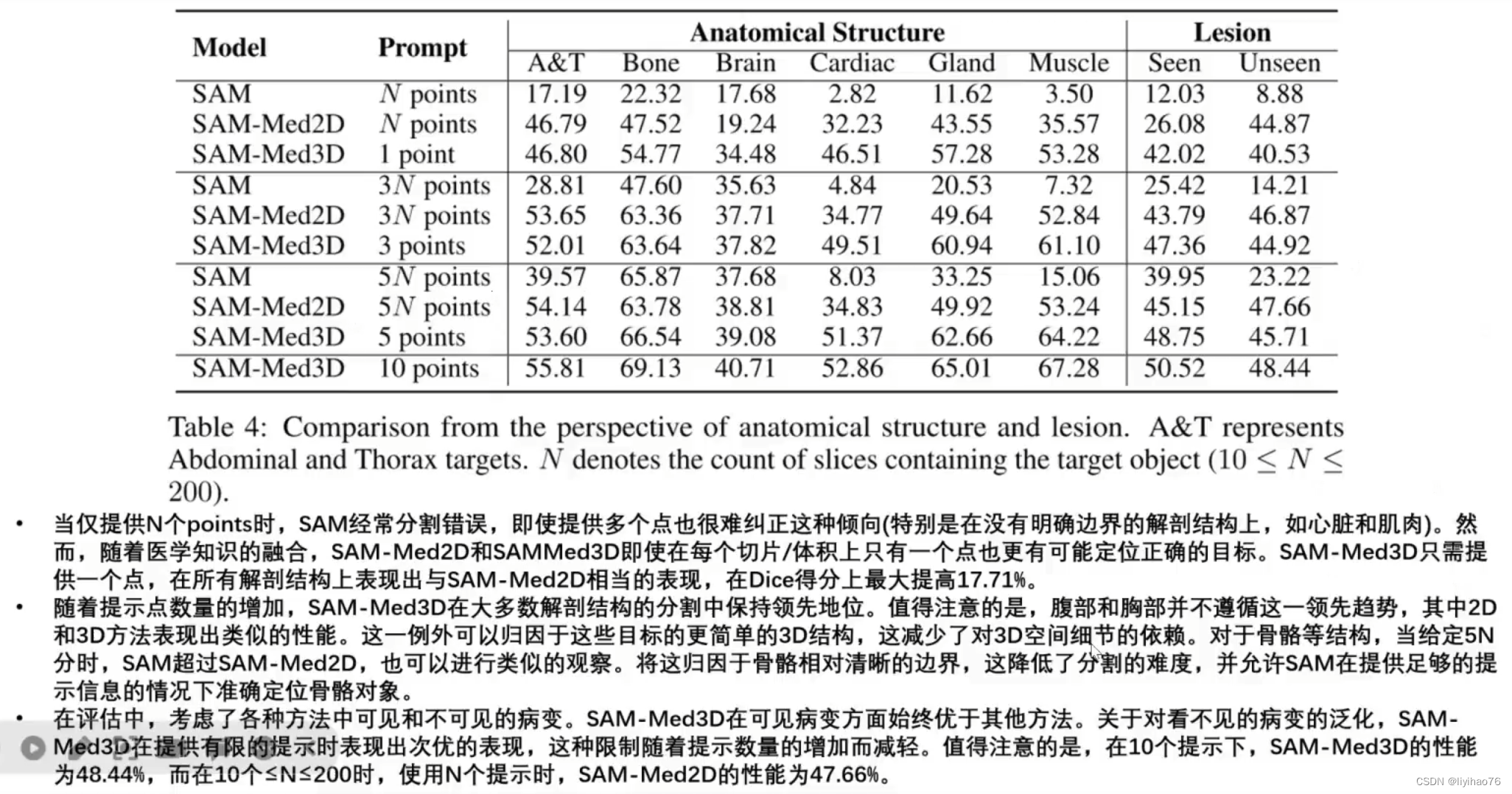
A&T 表示腹部和胸部。SAM-Med3D 只需10个提示点(最后一行)即可取得比 SAM 和 SAM-Med2D 更好的性能,而后两者往往需要上百个提示点。在评估中,我们考虑了各种⽅法中可见和不可见(zero-shot)的病变。对于不可见的病变,当提示有限时,表现次优。
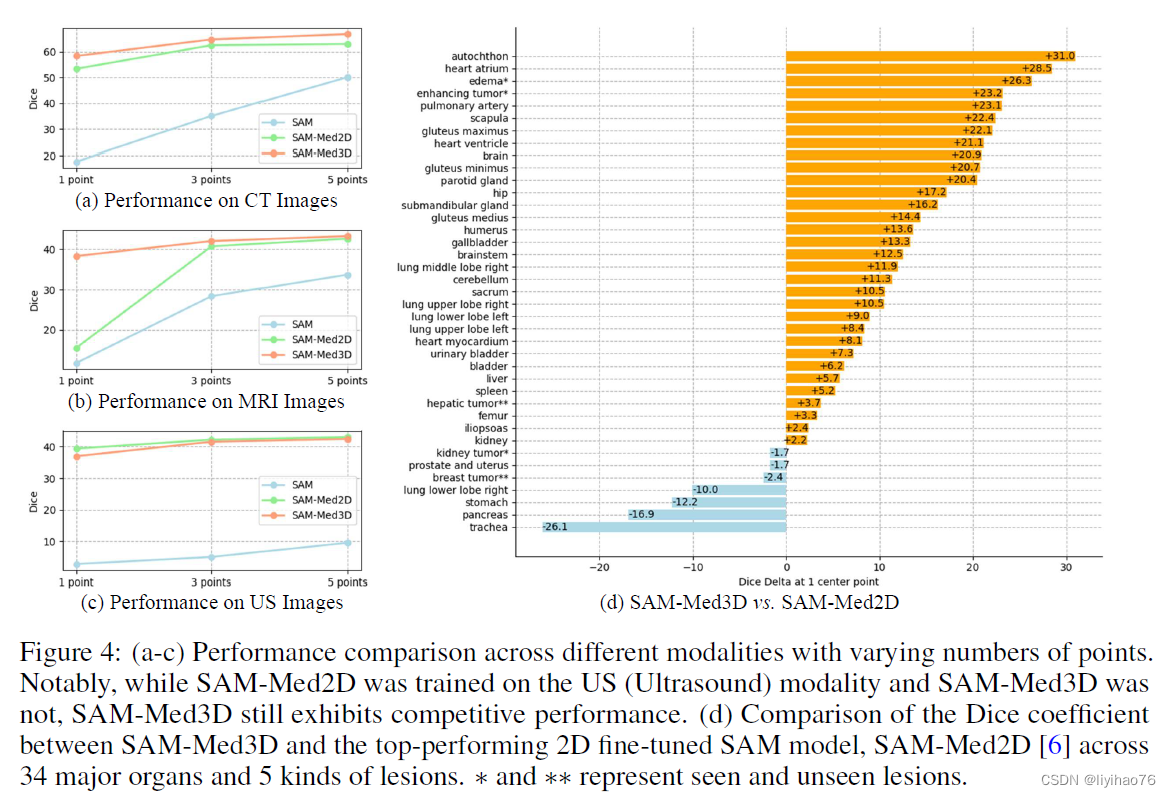
左侧三张图展示了不同模型在不同模态下的性能对比,其中SAM-Med3D在所有模态下均展现出优异性能。即使SAM-Med3D没有使用超声(US)图像训练,其性能仍与 SAM-Med2D相当。
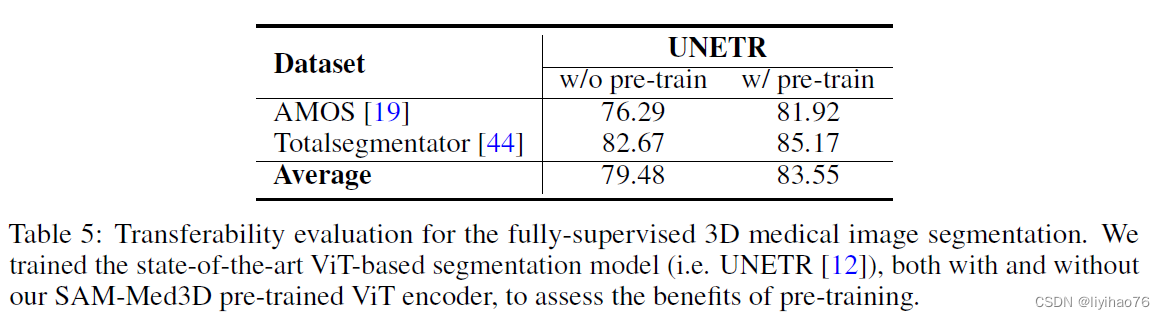
- 迁移性评估
作者将 SAM-Med3D 预训练的 ViT 图像编码器迁移到 UNETR 中进行使用,发现能够获得效果上的提升,证明了作者提出的 SAM-Med3D 具有迁移能力,这将能够对三维医学图像领域的发展提供帮助。据我们所知,SAM-Med3D 可能被定位为第一个基于 ViT 的 3D 医学图像基础模型。
5.3 可视化
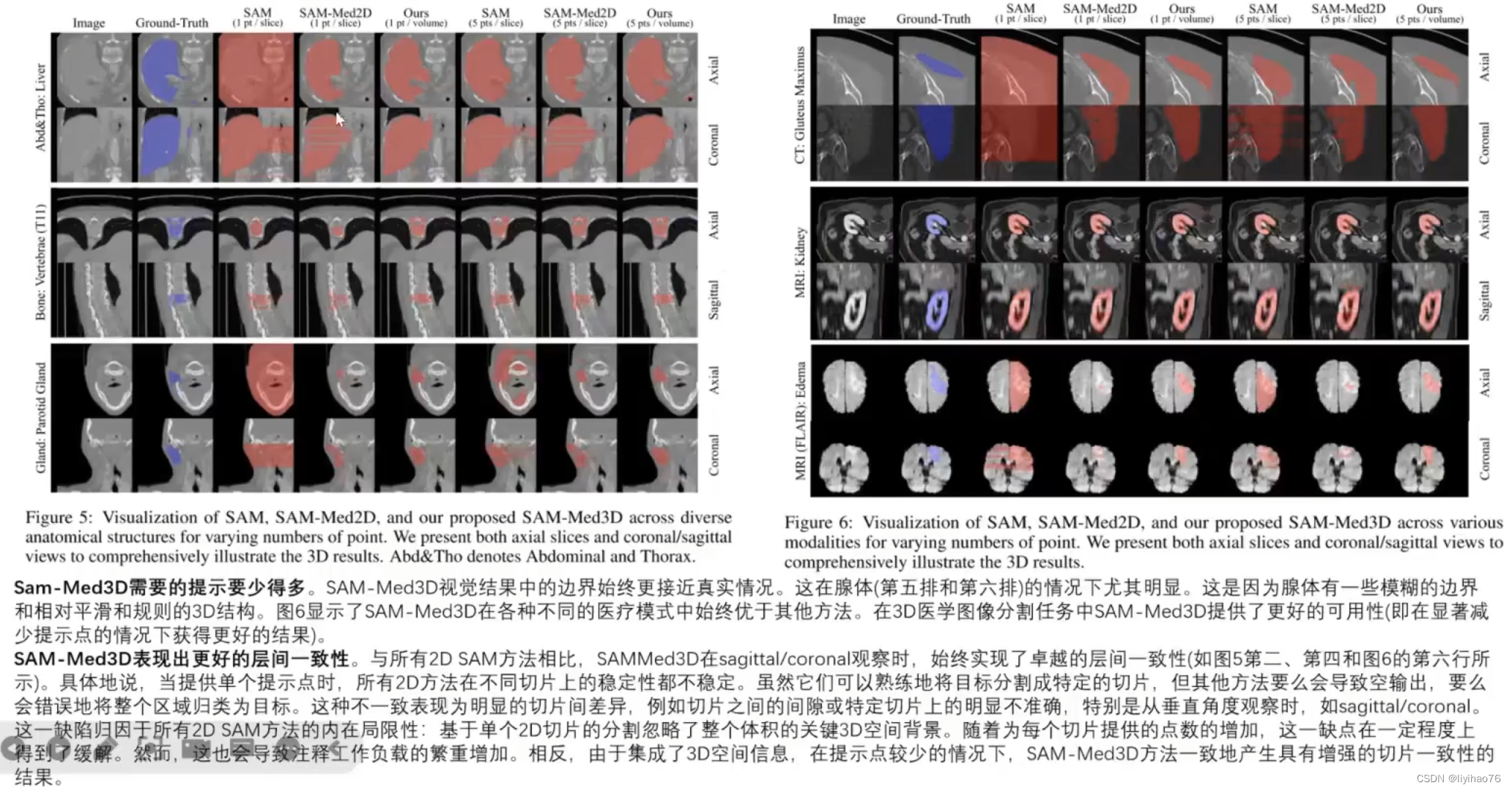
图五:在不同的解剖结构中,针对不同数量的点,对SAM、SAM-Med2D和SAM-Med3D进行可视化。作者同时展示了轴切片和冠状切片/矢状切片来全面说明三维结果。
图六:在各种模态下,针对不同的点数,对SAM、SAM-Med2D和SAM-Med3D进行可视化。作者同时展示了轴切片和冠状/矢状切片来全面说明三维结果。
6. 结论
- 在这项研究中,作者提出了 SAM-Med3D,这是一种专门用于3D体素医学图像分割的三维 SAM 模型。SAM-Med3D 在大规模的三维医学图像数据集上从头训练,其在不同组件中都采用了三维位置编码,直接整合三维空间信息,这使得它在体素医学图像分割任务中表现出卓越的性能。具体而言,SAM-Med3D 在提供仅一个提示点的情况下,相较于 SAM 在每个切片上提供一个提示点来说,性能提高了32.90%。这表明它能够在更少的提示点的情况下,在体素医学图像分割任务中取得更好的结果,这证明了它出色的可用性。
- 此外,作者还从多个角度广泛评估了 SAM-Med3D 的能力。对于不同的解剖结构,如骨骼、心脏和肌肉,在提供有限提示点的情况下,SAM-Med3D 明显优于其他方法。在不同的图像模态下,特别是核磁共振图像,通常需要比CT图像更多的提示点才能达到相同的性能,但 SAM-Med3D 在各种模态(包括核磁共振图像)、器官和病变下始终表现出色。此外,SAM-Med3D 的可迁移性也在不同的基准任务上经过了验证,该模型表现出了很强的潜力,因此 SAM-Med3D 有望成为一种强大的三维医学图像 Transformer 的预训练模型。
- 需要强调的是,不仅仅在数值结果方面,在可视化的结果中,SAM-Med3D 模型也表现出了更好的切片间的一致性和可用性。然而,三维模型在体积图像中的提示点变得更加稀疏,这增加了训练的难度。因此,如何更好地训练三维SAM仍然是需要进一步探索的领域,但这项研究为这一领域的未来发展提供了有力的方向和工具。
相关文章:
[医学分割大模型系列] (3) SAM-Med3D 分割大模型详解
[医学分割大模型系列] -3- SAM-Med3D 分割大模型解析 1. 特点2. 背景3. 训练数据集3.1 数据集收集3.2 数据清洗3.3 模型微调数据集 4. 模型结构4.1 3D Image Encoder4.2 3D Prompt Encoder4.3 3D mask Decoder4.4 模型权重 5. 评估5.1 评估数据集5.2 Quantitative Evaluation5.…...

【React】React中将 Props 传递给组件
当使用 React 时,props 是组件之间传递数据的主要方式。以下是针对您提到的五个问题的详细解答: 1. 如何向组件传递 props 在父组件中,你可以通过组件标签的属性(attributes)将 props 传递给子组件。这些属性在子组件…...

JOL工具查看java对象布局
JOL(Java Object Layout)是一个用于分析Java对象在Java虚拟机(JVM)中内存布局的小工具包。以下是如何使用JOL查看Java对象布局的步骤示例: Maven项目中添加依赖: 首先,在Maven项目中引入JOL工…...

Rust 实战练习 - 3. 文件系统,权限,读写,路径组合,time
目标: 文件系统,遍历目录路径的使用权限和文件属性时间time use std::{env, fmt::Debug, os::unix::fs::{MetadataExt, PermissionsExt}, path::{Path, PathBuf}, time::SystemTime};fn main() {// 时间处理// 除Duration和SystemTime外,标准库没有时间…...

既有理论深度又有技术细节——深度学习计算机视觉
推荐序 我曾经试图找到一本既有理论深度、知识广度,又有技术细节、数学原理的关于深度学习的书籍,供自己学习,也推荐给我的学生学习。虽浏览文献无数,但一直没有心仪的目标。两周前,刘升容女士将她的译作《深度学习计…...
:用 Temporal Table DDL 实现基于处理时间的关联)
Flink Temporal Join 系列 (2):用 Temporal Table DDL 实现基于处理时间的关联
本文要演示的是:使用 Temporal Table DDL 定义被关联表(维表),然后基于主动关联表(事实表)的“处理时间”去进行Temporal Join(关联时间维度上对应版本的维表数据)。该演示涉及三个要点: 被关联的表(维表)是用 Temporal Table DDL 形式定义,必须是一张时态表(版本…...
eclipse中使用PlantUML plugin查看对象关系
一.背景 公司安排的带徒弟任务,给徒弟讲了如何设计对象。他们的思维里面都是单表增删改查,我的脑海都是一个个对象,他们相互关系、各有特色本事。稳定的结构既能满足外部功能需求,又能在需求变更时以最小代价响应。最大程度的记录…...

HCIP的学习(4)
GRE和MGRE VPN---虚拟专用网络。指依靠ISP(运营商)或其他公有网络基础设施上构建的专用的安全数据通信网络。该网络是属于逻辑上的。 核心机制—隧道机制(封装技术) GRE—通用路由封装 三层隧道技术,并且是属于…...

MySQL写shell的问题
写shell用什么函数? select <?php phpinfo()> into outfile D:/shelltest.phpdumpfilefile_put_contentsoutfile不能用了怎么办? select unhex(udf.dll hex code) into dumpfile c:/mysql/mysql server 5.1/lib/plugin/xxoo.dll;可以UDF提权https…...
----条件运算符)
每天学习一会java(第一天)----条件运算符
今天学习的是条件运算符 1.描述: 条件运算符由“?”与 “:” 两个符号组成,必须一起使用,是 JAVA 中唯一的三目(三元)运算符,需要三个操作数才能进行运算。 条件表达式的一般使用形式为: 表达…...
hyperf 二十八 修改器 一
教程:Hyperf 一 修改器和访问器 根据教程,可设置相关函数,如set属性名Attribute()、get属性名Attribute(),设置和获取属性。这在thinkphp中也常见。 修改器:set属性名Attribute();访问器:get属性名Attri…...
ubuntu20.04安裝輸入法
文章目录 前言一、操作過程1、安装fcitx-googlepinyin2、配置language support 前言 參考文獻 一、操作過程 1、安装fcitx-googlepinyin sudo apt-get install fcitx-googlepinyin2、配置language support 第一次點擊進去,會讓你安裝 點擊ctrl和空格切換中英文…...

2024年【熔化焊接与热切割】考试报名及熔化焊接与热切割找解析
题库来源:安全生产模拟考试一点通公众号小程序 熔化焊接与热切割考试报名考前必练!安全生产模拟考试一点通每个月更新熔化焊接与热切割找解析题目及答案!多做几遍,其实通过熔化焊接与热切割实操考试视频很简单。 1、【单选题】 下…...
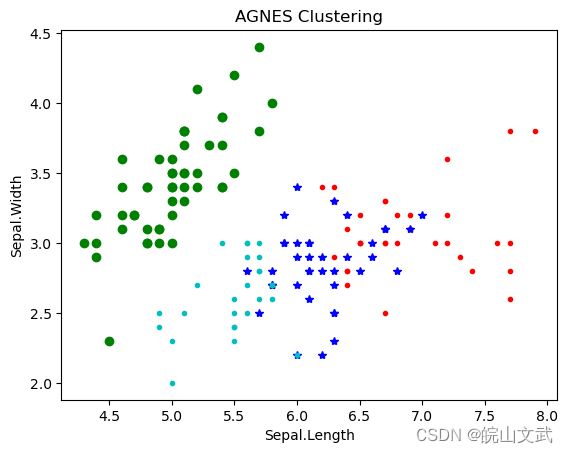
聚类分析|基于层次的聚类方法及其Python实现
聚类分析|基于层次的聚类方法及其Python实现 0. 基于层次的聚类方法1. 簇间距离度量方法1.1 最小距离1.2 最大距离1.3 平均距离1.4 中心法1.5 离差平方和 2. 基于层次的聚类算法2.1 凝聚(Agglomerative)2.3 分裂(Divisive) 3. 基于…...

前端实现导出xlsx功能
1.安装xlsx插件 npm install xlsx 2.示例 import XLSX from xlsx;// 示例数据 const data [[Name, Age, Country],[Alice, 25, USA],[Bob, 30, Canada],[Charlie, 28, UK] ];// 创建一个 Workbook 对象 const wb XLSX.utils.book_new(); const ws XLSX.utils.aoa_to_sheet…...
算法系列--动态规划--⼦数组、⼦串系列(数组中连续的⼀段)(1)
💕"我们好像在池塘的水底,从一个月亮走向另一个月亮。"💕 作者:Mylvzi 文章主要内容:算法系列–动态规划–⼦数组、⼦串系列(数组中连续的⼀段)(1) 大家好,今天为大家带来的是算法系…...

RESTful架构
RESTful架构中的URI设计与传统的URL设计有一些区别。让我通过具体的例子来解释一下: 传统的URL设计通常将操作和资源混合在一起,例如: 获取所有图书:GET /getBooks获取特定图书:GET /getBookById/{id}创建新图书&…...
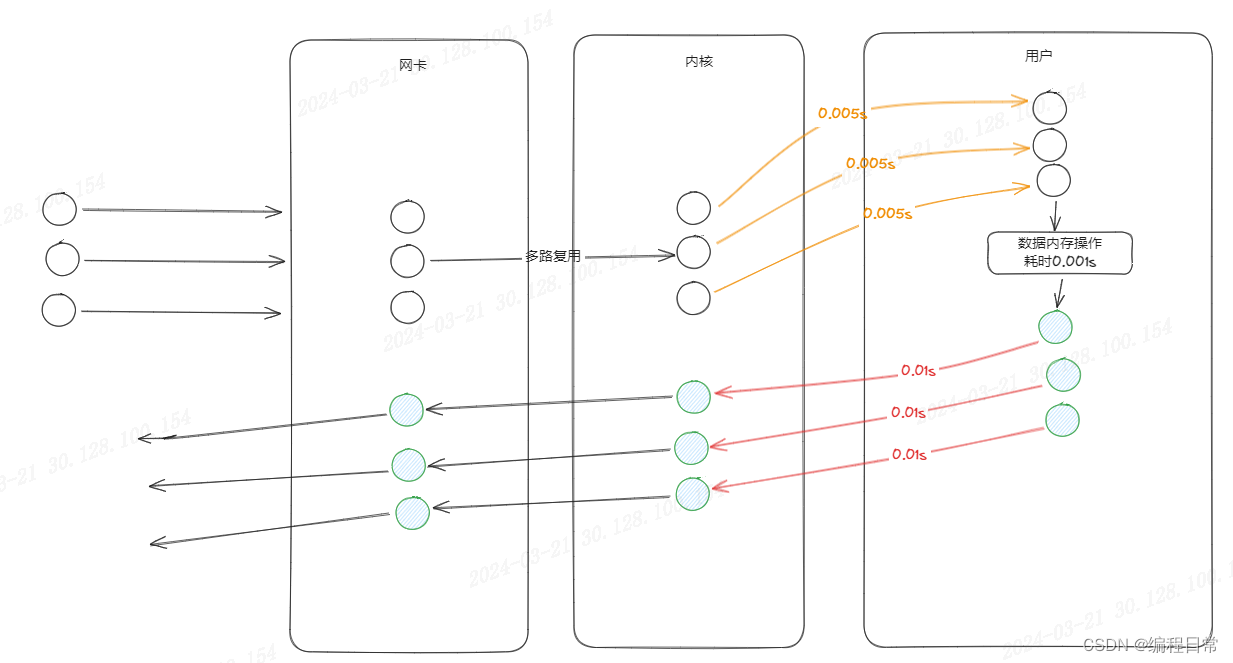
从IO操作与多线程的思考到Redis-6.0
IO操作->线程阻塞->释放CPU资源->多线程技术提升CPU利用率 在没有涉及磁盘操作和网络请求的程序中,通常不会出现线程等待状态。线程等待状态通常是由于线程需要等待某些事件的发生,比如I/O操作完成、网络请求返回等。如果程序只是进行计算或者简…...

MNN介绍、安装和编译
MNN是一个轻量级的深度学习推理框架,由阿里巴巴公司开发。它支持多种硬件平台,包括CPU、GPU和NPU,并提供高效、高性能的深度学习模型推理服务。下面是MNN的安装和编译步骤: 下载MNN源代码 在MNN的GitHub页面(https://g…...
【计算机图形学】AO-Grasp: Articulated Object Grasp Generation
对AO-Grasp: Articulated Object Grasp Generation的简单理解 文章目录 1. 做的事情2. AO-Grasp数据集2.1 抓取参数化和label标准2.2 语义和几何感知的抓取采样 3. AO-Grasp抓取预测3.1 预测抓取点3.2 抓取方向预测 4. 总结 1. 做的事情 引入AO-Grasp,grasp propo…...

布莱克威尔三大定理:从统计理论到AI工程的核心支柱
1. 项目概述:当统计学遇上人工智能如果你在机器学习领域摸爬滚打了一段时间,可能会发现一个有趣的现象:很多听起来很“新潮”的算法,其核心思想往往能在几十年前的统计学论文里找到源头。这并非巧合,而是学科发展的必然…...
)
保姆级教程:用USM的PE和分区助手,把旧硬盘数据无损搬到新硬盘(附Win11引导修复)
Win11系统硬盘无损迁移全指南:USM PE与分区助手实战详解当你面对一块崭新的固态硬盘,既想享受飞速读写体验,又担心重装系统后那些精心调试的设置和重要数据丢失,这种纠结我太熟悉了。去年我的主力机升级时,整整3TB的工…...

从线性智能到多维能力光谱:重新理解AI的“陌生性”与工程实践
1. 项目概述:重新审视智能的“陌生性”在人工智能领域,我们似乎总在追逐一个幽灵般的“通用智能”(AGI)——一个能在所有认知任务上媲美甚至超越人类的系统。这种想象往往基于一个根深蒂固的线性模型:智能是一个单一的…...

两个世界的同一种崩溃:从窗口黑屏到宇宙热寂的同构联想
一、两个世界的同一种崩溃 一段着色器代码中 cell.xy 的缩放因子从 9 被修改为 99。着色器随即呈现完全黑屏——既无报错信息,也无渲染异常,只有纯粹、彻底、连噪点都不存在的黑色。在屏幕的某个抽象维度上,发生了一件与理论物理学家在黑板上…...

LeetCode 930:和相同的二元子数组 | 前缀和与哈希表
LeetCode 930:和相同的二元子数组 | 前缀和与哈希表 引言 和相同的二元子数组(Binary Subarrays With Sum)是 LeetCode 第 930 题,难度为 Medium。题目要求在二元数组(元素只有 0 和 1)中找出子数组和等于 …...

Meta裁了8000人,员工拖着行李箱抢可乐
昨天凌晨4点,Meta很多员工的邮箱同时响了。是裁员邮件。这一次,Meta裁掉了全球约10%的员工,规模大约8000人。分手大礼包:16周基础薪资 每满1年工龄额外2周薪资 18个月全家医保。真正让硅谷炸锅的,反而是裁员前几天&a…...
)
别再瞎试了!用Matlab手把手教你做拉丁超立方抽样(附10个点二维案例代码)
别再瞎试了!用Matlab手把手教你做拉丁超立方抽样(附10个点二维案例代码) 当面对昂贵的仿真或物理实验时,如何用最少的样本点获取最全面的数据特征?传统随机抽样可能导致样本点扎堆或分布不均,而拉丁超立方抽…...
)
centos7启动yum 安装失败原因(个人观点如有错误请指正)
第一步:修复 DNS(最关键) bash 运行 echo "nameserver 8.8.8.8" >> /etc/resolv.conf echo "nameserver 114.114.114.114" >> /etc/resolv.conf第二步:下载阿里云 CentOS7 国内源 bash 运行 curl…...
)
手把手教你用WSL搞定RAX3000M路由器的SSH配置修改(Win10/Win11适用)
在Windows系统下通过WSL高效配置RAX3000M路由器的完整指南 对于习惯Windows操作系统的技术爱好者来说,想要修改路由器配置文件常常面临一个尴尬的处境——大多数高级配置工具和教程都默认用户已经熟悉Linux环境。本文将彻底解决这个痛点,教你如何在不安装…...
)
别再让串口中断拖慢你的STM32F407了!手把手教你配置UART4的DMA收发(附完整代码)
STM32F407 UART4 DMA通信实战:突破串口中断的性能瓶颈 如果你正在使用STM32F407的UART4进行数据通信,却频繁遇到系统响应迟缓的问题,很可能是因为传统的串口中断方式正在消耗大量CPU资源。每次收发一个字节都触发中断,当数据量大…...