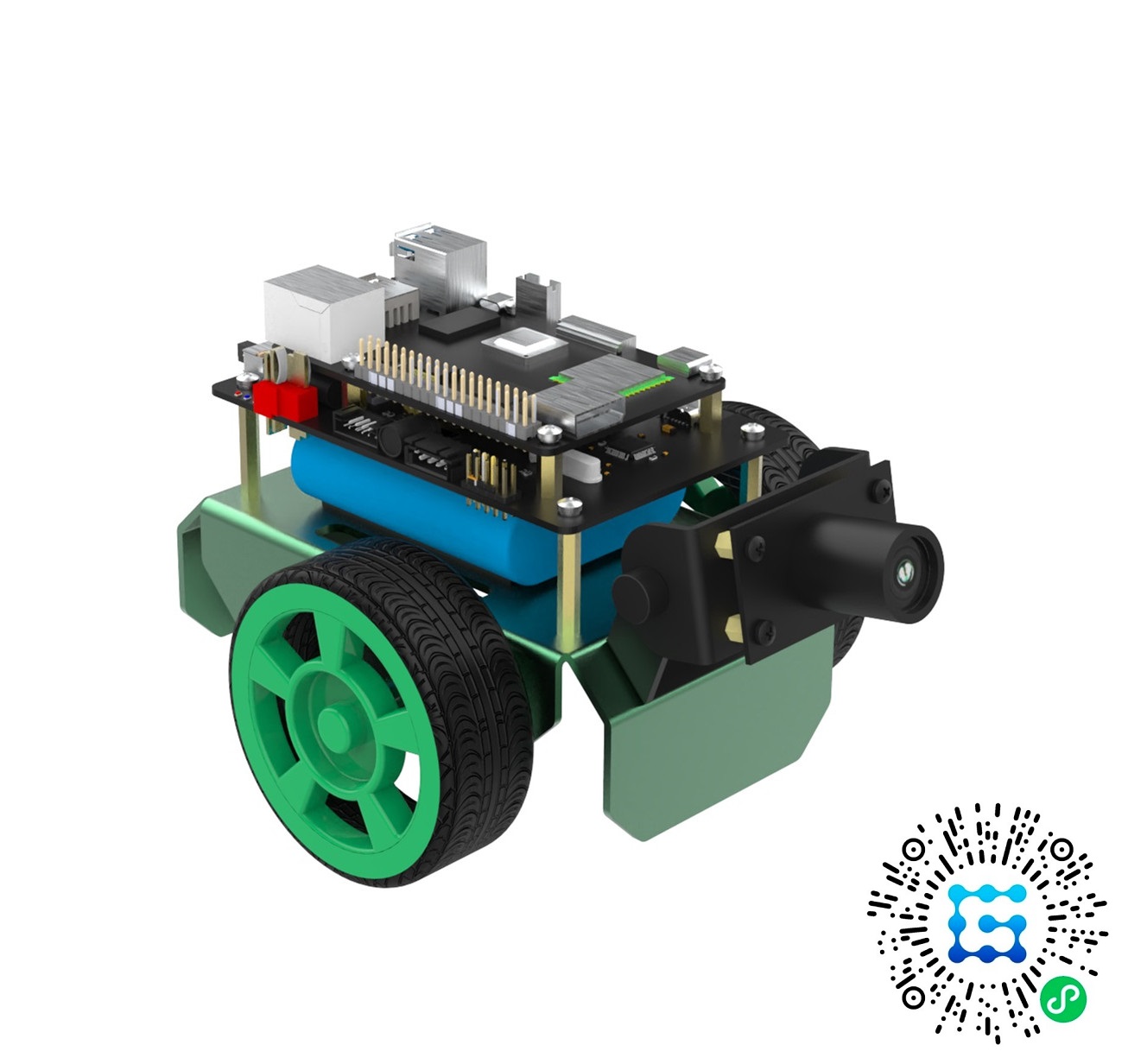
OriginBot智能机器人开源套件
详情可参见:OriginBot智能机器人开源套件——支持ROS2/TogetherROS,算力强劲,配套古月居定制课程 (guyuehome.com)
OriginBot智能机器人开源套件
最新消息:OriginBot V2.1.0版本正式发布,新增车牌识别,点击查看
OriginBot
OriginBot是一款智能机器人开源套件,更是一个社区共建的开源项目,旨在让每一位参与者享受机器人开发的乐趣。
开源共建
“开源就是力量”——这是OriginBot的核心精神,欢迎每一位开发者参与其中。
▶ 开源生态
持续迭代 ◀
全栈开发
智能机器人开发之路漫漫修远,OriginBot将陪伴每一位开发者上下求索。
▶ 全技术栈
内容齐全 ◀

智能应用
OriginBot结构简约,应用却不简单,可以拓展无限可能。
▶ 算力强劲
应用丰富 ◀

源于热爱
每位机器人开发者都曾有“从零开发一款机器人”的梦想,OriginBot源于这一份最初的热爱。
▶ 独一无二
起航开发 ◀
起航机器人开发
配置参数
| 主要配置项 | 导航版 | 视觉版 |
|---|---|---|
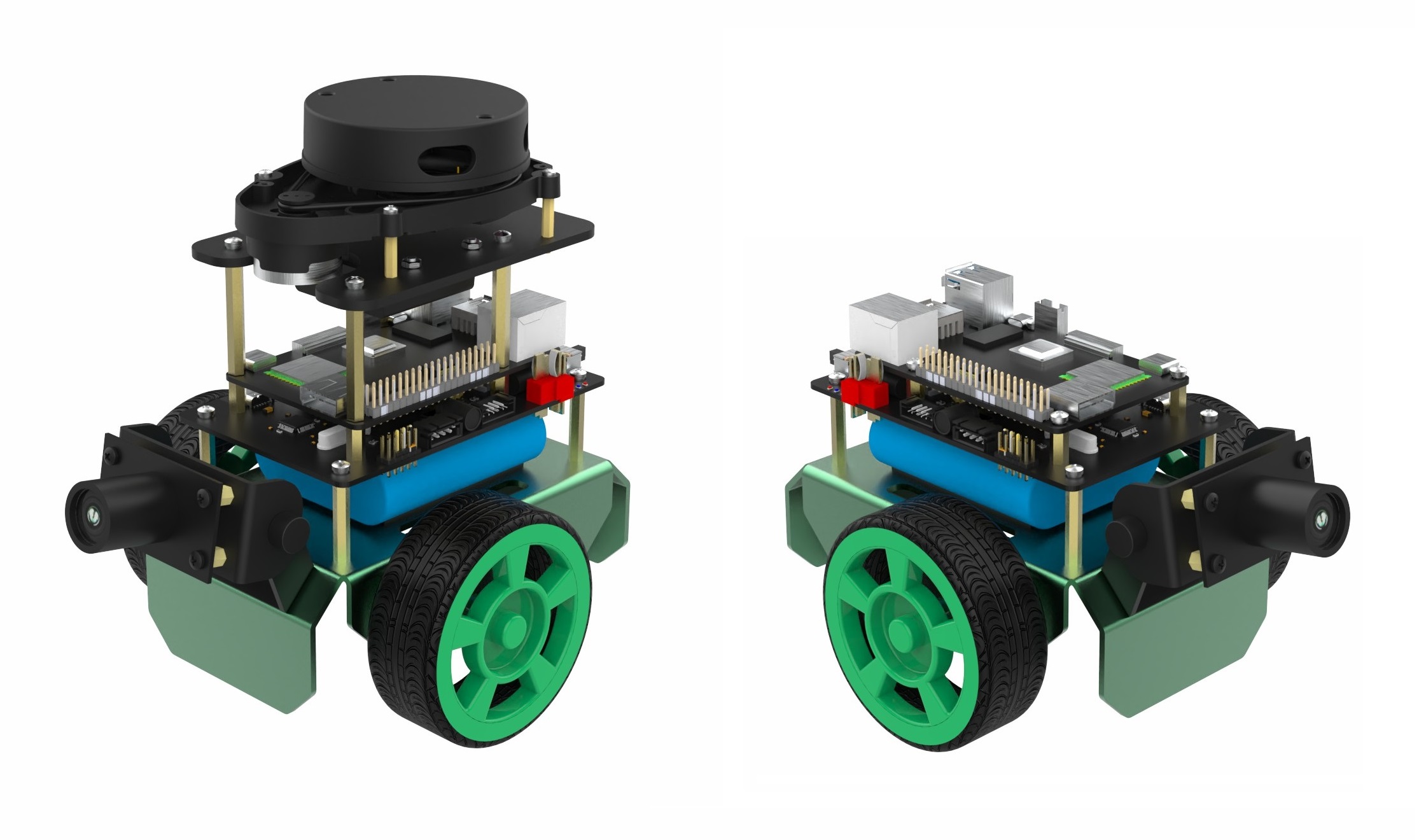
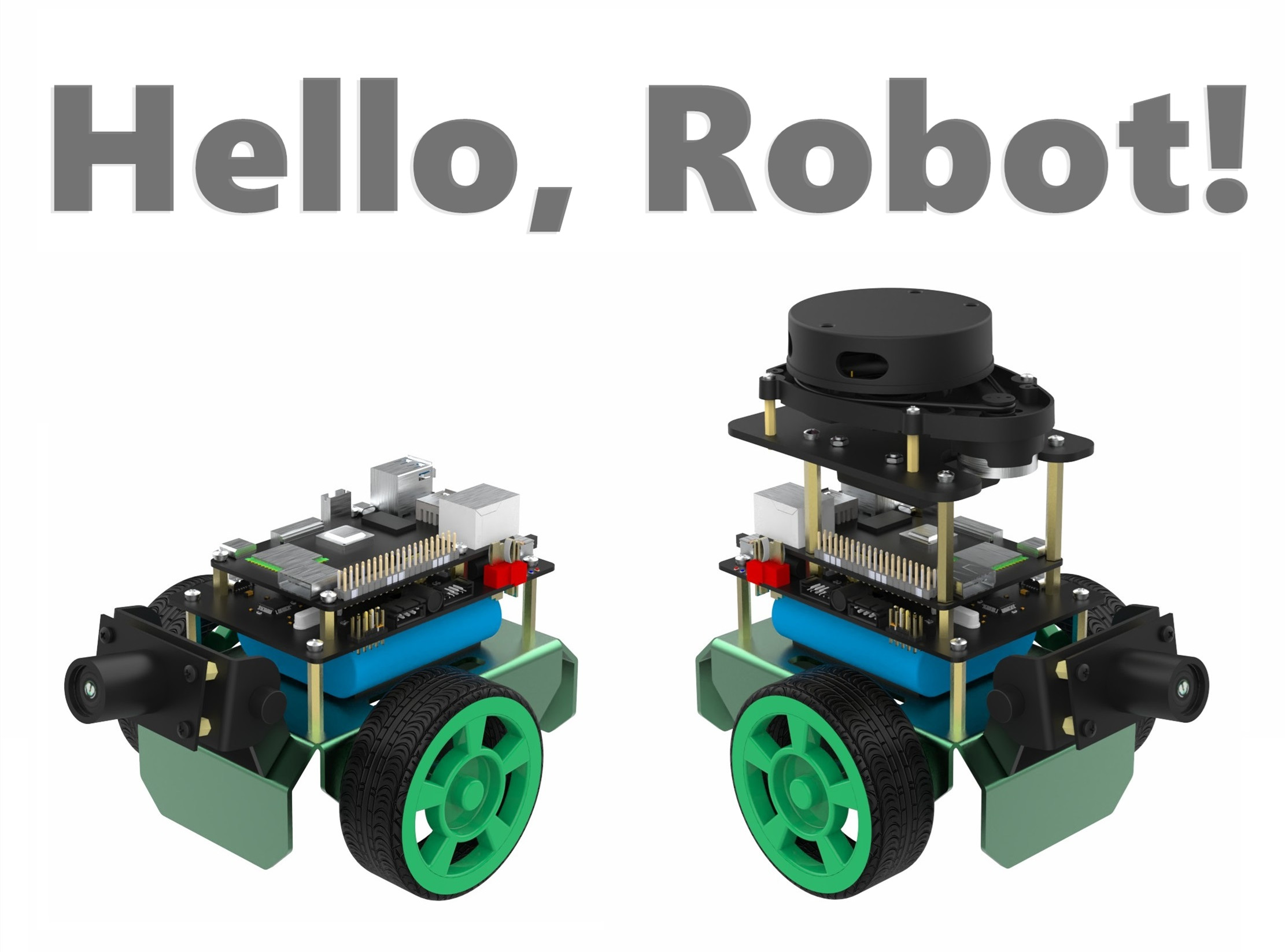
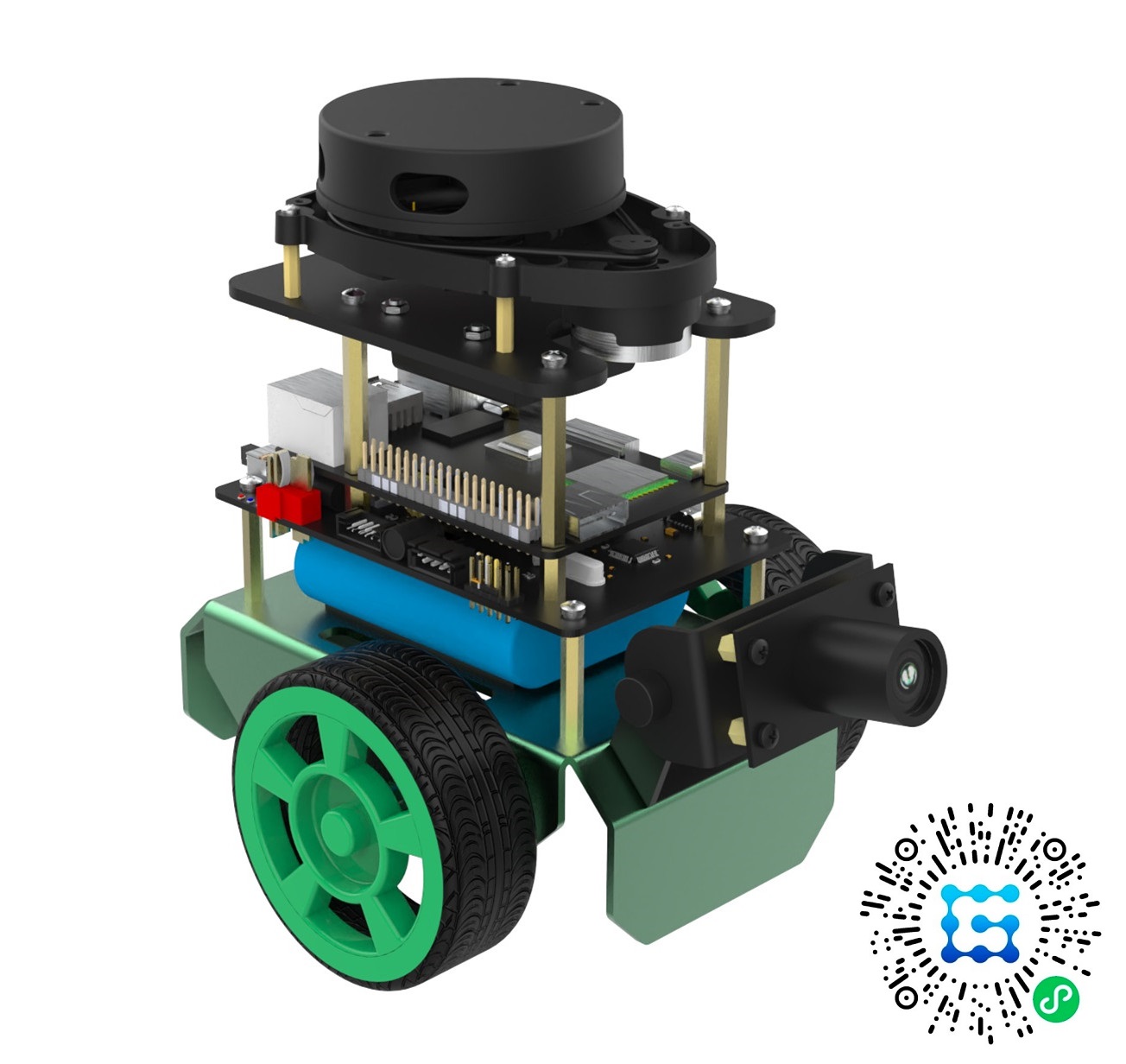
| 效果图 |
|
|
| 应用处理器 | RDK X3 CPU:四核ARM Cortex-A53@1.5GHz BPU:双核@1GHz,等效算力5TOPS 内存:4GB LPDDR4 RAM 存储:32GB(TF卡) | RDK X3 CPU:四核ARM Cortex-A53@1.5GHz BPU:双核@1GHz,等效算力5TOPS 内存:4GB LPDDR4 RAM 存储:32GB(TF卡) |
| 运动控制器 | MCU:STM32F103 Flash容量:64K RAM容量:20KB | MCU:STM32F103 Flash容量:64K RAM容量:20KB |
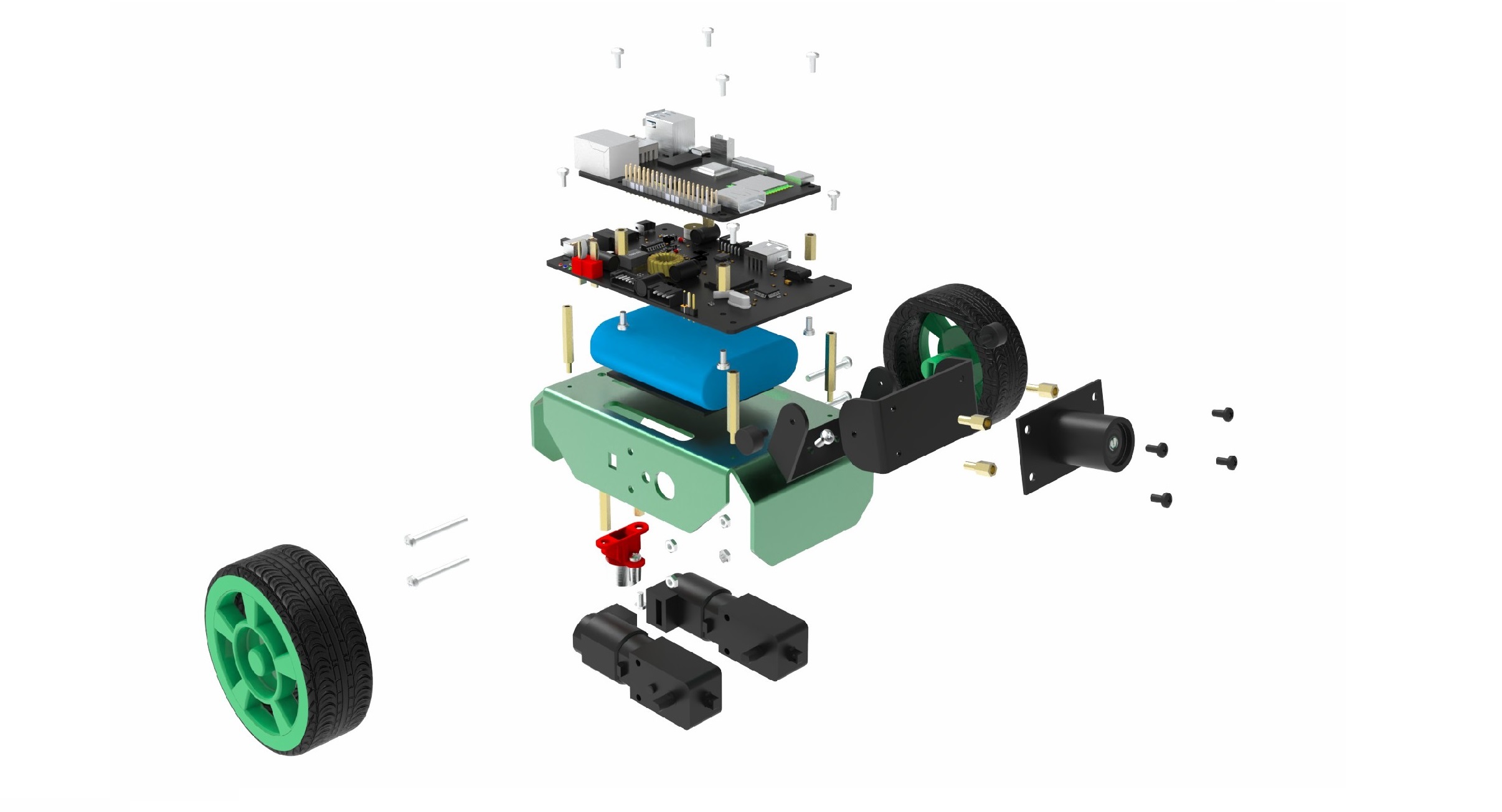
| 差速底盘 | 带编码器TT电机 * 2 摄像头支架 万向轮及支架 | 带编码器TT电机 * 2 摄像头支架 万向轮及支架 |
| 摄像头 | 400W像素MIPI相机 | 400W像素MIPI相机 |
| 激光雷达 | 5~10Hz扫描频率, 360°扫描角度 2cm绝对误差 | - |
| 姿态传感器 | 加速度、陀螺仪、角度输出 自带卡尔曼滤波 | - |
| 视频课程 | 古月居定制课程 | 古月居定制课程 |
| 电池续航 | 2~4小时 2000 mAh(典型值) 12.6 V 800mA充电器 | 2~4小时 2000 mAh(典型值) 12.6V 800mA充电器 |
| 尺寸 | 长:180 mm 宽:132 mm 高:167 mm(±2) | 长:180 mm 宽:132 mm 高:109 mm(±2) |
| 重量 | 0.78 kg(±0.05) | 0.62 kg(±0.05) |
| 最大速度 | 0.8 m/s(±0.05) | 1.0 m/s(±0.05) |
| 操作软件 | ubuntu 20.04(Server) ROS2 Foxy TogetheROS 2.0.2 | ubuntu 20.04(Server) ROS2 Foxy TogetheROS 2.0.2 |
| 其他配件 | 唯一编号车牌贴纸 雷达贴纸 螺丝、铜柱、线缆、读卡器安装工具等 | 唯一编号车牌贴纸 螺丝、铜柱、线缆、读卡器安装工具等 |
参与贡献
诚挚邀请各位开发者可以参与到OriginBot项目当中来,参与的方式和形式有很多种:
提供反馈
-
在使用OriginBot套件的过程中,如有任何问题或者建议,欢迎在古月居社区版块提问讨论;
-
在使用OriginBot软件的过程中,如有发现任何bug,欢迎在代码仓库中提交Issue;
贡献代码
- 在使用OriginBot套件的过程中,如对原生代码有优化、增加等修改,欢迎在代码仓库中提交Pull Request;
开源传递
-
如果你对OriginBot有兴趣,欢迎点赞该项目的源码仓库,或者分享给身边有需要的开发者;
-
如果基于OriginBot开源项目衍生出更多有意思的功能或者机器人,欢迎在社区板块中与大家分享,优秀的项目我们也会在社区中宣传;
链接汇总
-
社区主站:https://www.originbot.org
-
开源仓库:
| 名称 | 链接 | 说明 |
|---|---|---|
| originbot | originbot: OriginBot智能机器人开源套件 | originbot机器人端功能包仓库 |
| originbot_desktop | originbot_desktop: OriginBot智能机器人开源套件(PC端功能包) | originbot电脑端功能包仓库 |
| originbot_controller | originbot_controller: OriginBot智能机器人开源套件(控制器开源仓库) | originbot控制器源码仓库 |
-
论坛交流:OriginBot智能机器人开源套件 - 古月居
相关文章:
OriginBot智能机器人开源套件
详情可参见:OriginBot智能机器人开源套件——支持ROS2/TogetherROS,算力强劲,配套古月居定制课程 (guyuehome.com) OriginBot智能机器人开源套件 最新消息:OriginBot V2.1.0版本正式发布,新增车牌识别,点击…...
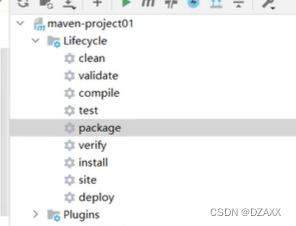
Java Web-Maven
Maven是apache旗下的一个开源项目,是一款用于管理和构建java项目的工具 Maven的作用 1.依赖管理:方便快捷的管理项目依赖资源(jar包),避免版本冲突问题 我们有的项目需要大量的jar包,采用手动导包的方式非常繁琐,并且版本升级也…...

.Net 异步委托
委托的 BeginInvoke 方法和 EndInvoke 方法可以实现异步执行委托方法。这允许委托的方法在后台线程中执行,而不会阻塞当前线程。小编在之前的webform开发中遇到下载进度条卡死的问题就是用它解决的。 案例: namespace ConsoleApplication1 {class Progr…...
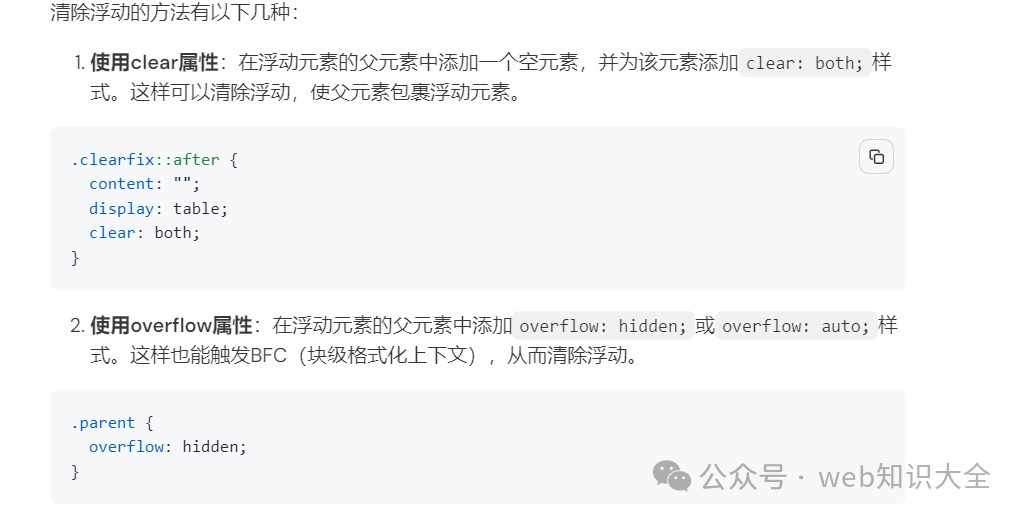
web前端面试题---->HTML、CSS
一.居中方法 block元素如何居中 margin:0 auto;position: absolute; top: 50%; left: 50%; transform: translate(-50%, -50%);flex布局: 对父元素操作 : justify-content:center; al…...

移动端Web笔记day03
移动 Web 第三题 01-移动 Web 基础 谷歌模拟器 模拟移动设备,方便查看页面效果,移动端的效果是当手机屏幕发生了变化,页面和页面中的元素也要跟着等比例变化。 屏幕分辨率 分类: 硬件分辨路 -> 物理分辨率:硬件…...
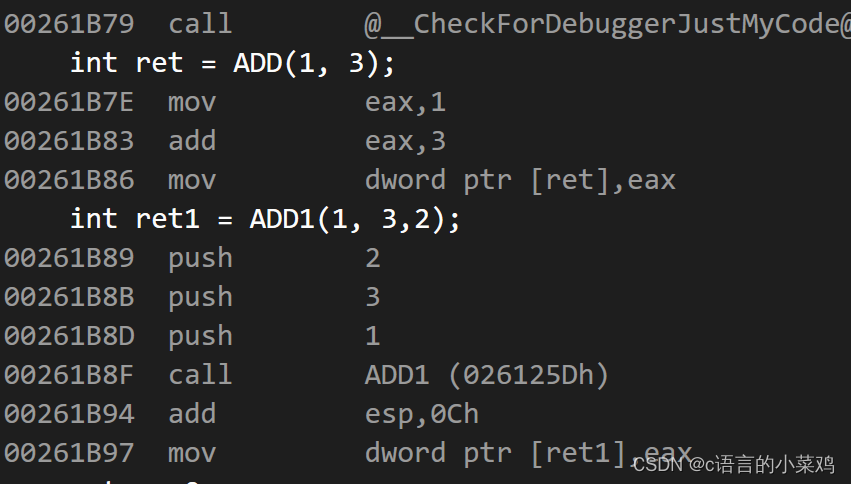
c++的学习之路:3、入门(2)
一、引用 1、引用的概念 引用不是新定义一个变量,而是给已存在变量取了一个别名,编译器不会为引用变量开辟内存空 间,它和它引用的变量共用同一块内存空间。 怎么说呢,简单点理解就是你的小名,家里人叫你小名&#…...
面试经典150题【91-100】
文章目录 面试经典150题【91-100】70.爬楼梯198.打家劫舍139.单词拆分322.零钱兑换300.递增最长子序列77.组合46.全排列39.组合总和(※)22.括号生成79.单词搜索 面试经典150题【91-100】 五道一维dp题五道回溯题。 70.爬楼梯 从递归到动态规划 public …...

在 nginx 中使用 JavaScript
前些日子尝试了在 nginx 中写 JavaScript 的效果。考虑到 JavaScript 作为编程语言不是强需求,在nginx生态上还是 lua 独大,并且还有 openresty 这样一直强力输血,大部分应用场景都能找到参考的解决方案。 插件生态来说,github 上…...

【pytorch】安装合集
使用conda或者pip安装的指令 https://pytorch.org/get-started/previous-versions/ 测试pytorch_gpu是否可用的代码 # 测试pytorch是否安装成功 import torch print(torch.__version__) print(torch.cuda.is_available())...

【教程】PLSQL查看表属性乱码解决方法
一、前言 PL/SQL是Oracle数据库的编程语言,用于编写存储过程、触发器、函数等。 今天用plsql想查看表的属性,看看各个字段的注释,可是打开一看,居然是乱码的,如下面这样 如果在使用PL/SQL查看表属性时出现乱码&…...

新书速览|Django 5企业级Web应用开发实战:视频教学版
掌握Django框架开发技能,实战投票应用系统和内容管理系统 本书内容 《Django 5企业级Web应用开发实战:视频教学版》精选当前简单、实用和流行的Django实例代码,帮助读者学习和掌握Django 5框架及其相关技术栈的开发知识。本书系统全面、内容…...

excel创建和部分使用
一.excel导出是在开发中经常操作的内容,对于excel的导出也是有各种成熟的api组件 这里是最近的项目有通过ts处理,这里的内容通过ts ①引入const XlsxPopulate require("xlsx-populate"); const XLSXChart require("xlsx-chart"); 通过命令行操作, pnp…...

pycharm使用远程服务器的jupyter环境
1、确保服务器上安装了jupyter,如果没有,执行下面命令安装 pip install jupyter2、启动jupyter notebook服务 jupyter notebook --no-browser --port8888 --ip0.0.0.0 --allow-root表明在服务器的8888 端口上启动 Jupyter Notebook,并允许从任何 IP 地…...
ES6 基础
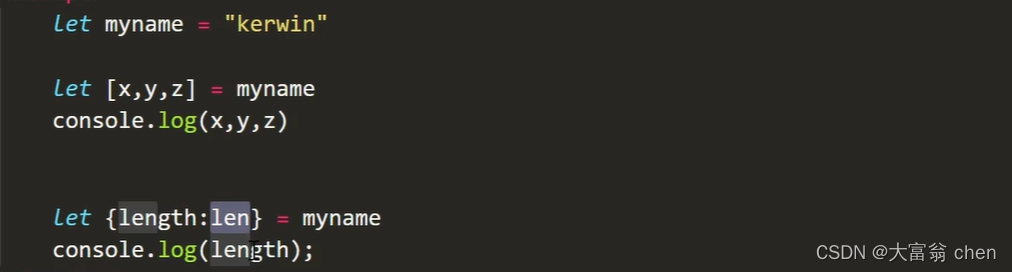
文章目录 1. 初识 ES62. let 声明变量3. const 声明常量4. 解构赋值 1. 初识 ES6 ECMAScript6.0(以下简称ES6)是JavaScript语言的下一代标准,已经在2015年6月正式发布了。它的目标,是使得」JavaScript语言可以用来编写复杂的大型应用程序,成为…...
【双指针】Leetcode 有效三角形的个数
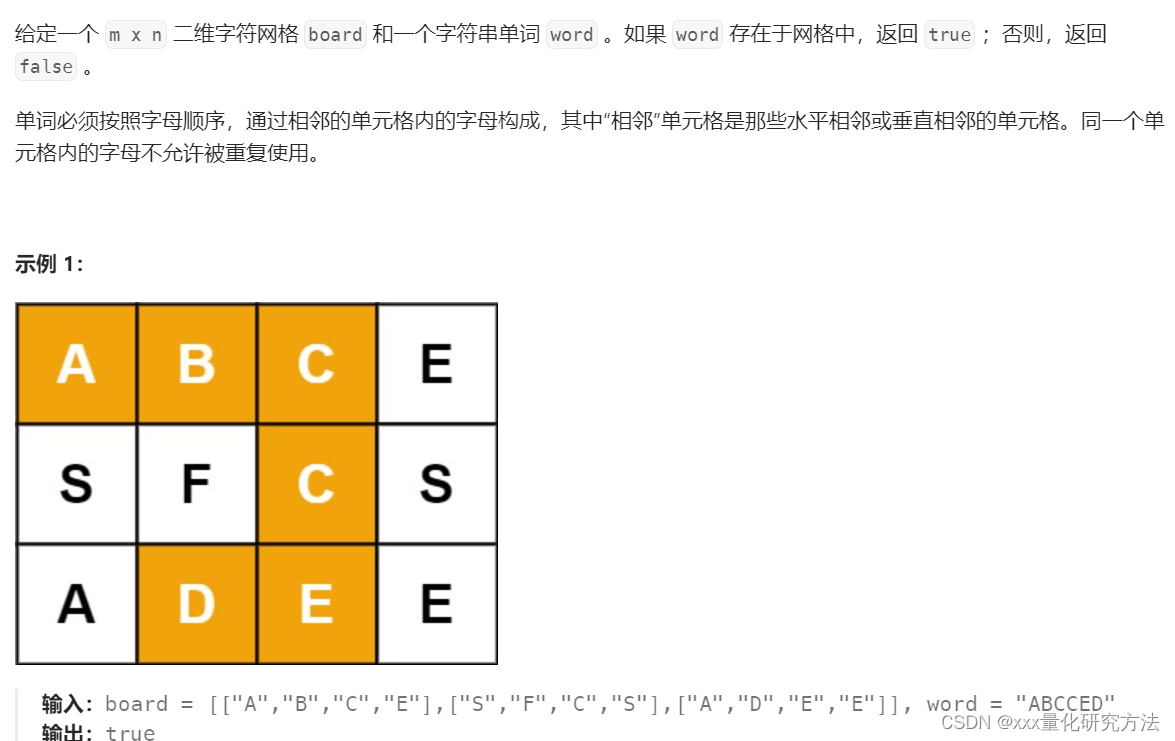
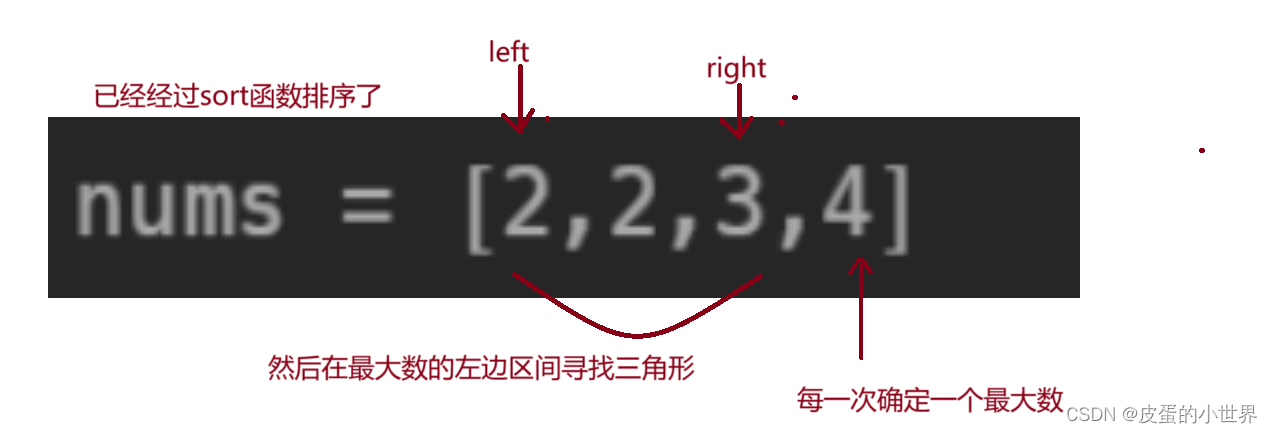
题目解析 611. 有效三角形的个数 算法讲解 回顾知识:任意两数之和大于第三数就可以构成三角形 算法 1:暴力枚举 int triangleNumber(vector<int>& nums) {// 1. 排序sort(nums.begin(), nums.end());int n nums.size(), ret 0;// 2. 从…...

python项目练习——4.手写数字识别
使用Python和Scikit-learn库进行机器学习模型训练的项目——手写数字识别。 项目分析: 数据准备:使用公开数据集(如MNIST)作为训练和测试数据。数据预处理:对图像数据进行归一化、展平等操作,以便输入到机…...
【目标检测】NMS算法的理论讲解
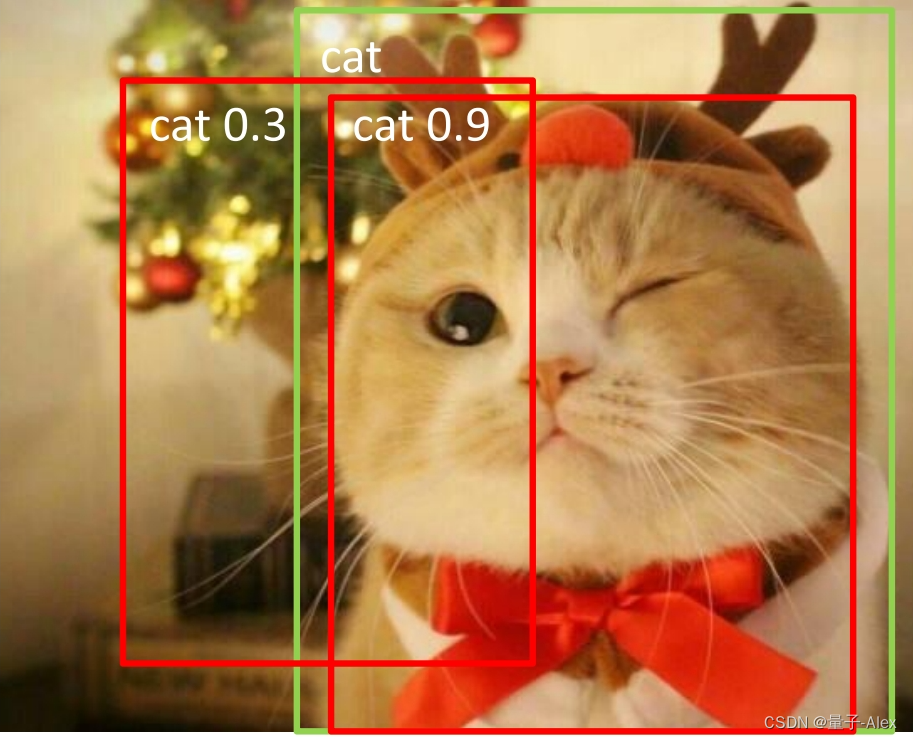
将NMS就必须先讲IOU, IOU就是交并比,两个检测框的交集除以两个检测框的并集就是IOU 为什么要做NMS操作,因为要去除同一个物体的多的冗余检测框 那么NMS算法是如何做的呢? 以上是算法的流程图 下面讲解算法的流程 首先输入是预…...
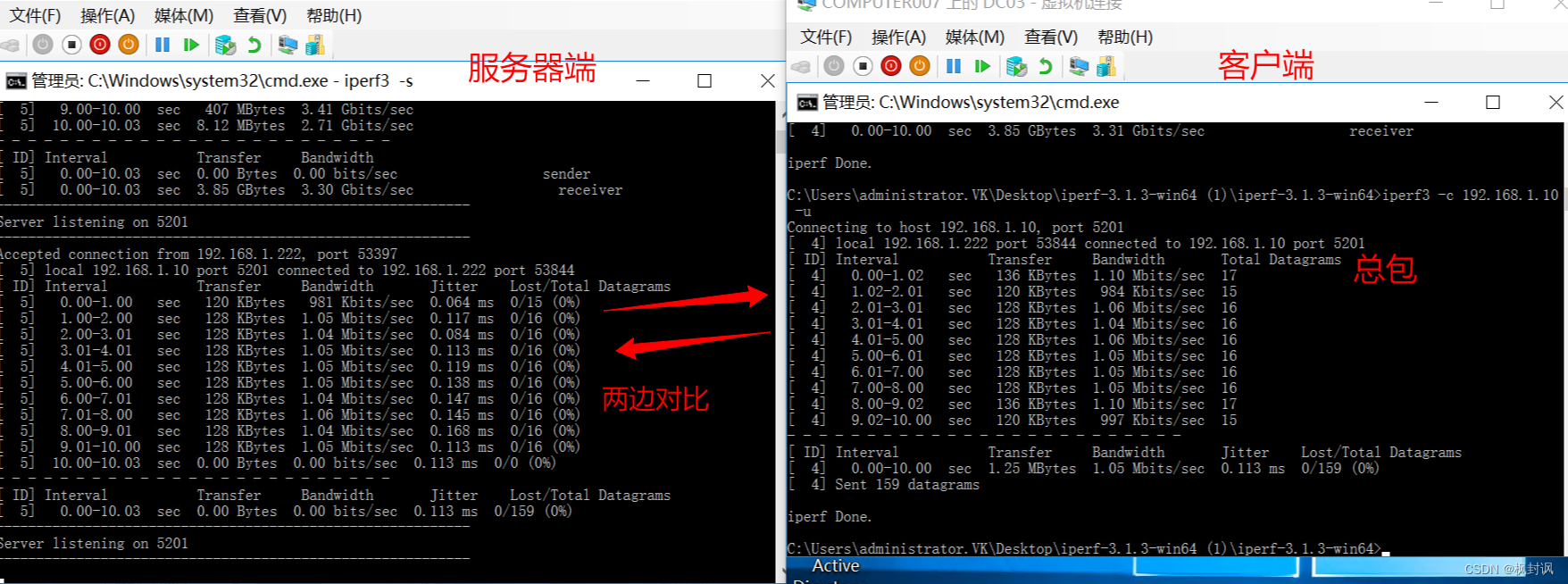
3-iperf3 使用什么工具可以检测网络带宽、延迟和数据包丢失率等网络性能参数呢?
(1)iperf3简介 1.iperf3简介 2.用途(特点) 3.下载iperf3地址 (2)实战 1.iperf3参数 (1)通用参数(客户端和服务器端都是适用的) (2)客户端参数 实验1&…...

阳光倒灌高准直汽车抬头显示器HUD太阳光模拟器
阳光倒灌高准直汽车抬头显示器HUD太阳光模拟器是一种高级别的模拟设备,用于模拟太阳光的光谱、强度及照射角度,应用于太阳能电池板、光伏系统等领域的研究和测试。其参数包括光谱范围、光强度、光源、照射角度、均匀性和稳定性,可根据需求调整…...

jdk11中自定义java类在jvm是如何被查找、加载
yym带你了解jvm源码,openjdk11源码,java类jvm加载原理 jdk11中java类在jvm是如何被1查找、2加载 以下说明的是MiDept类是如何被java classloader 和 jvm加载步骤 上源代码 public static void main(String[] args) {Thread.currentThread().setName…...

Python实现“打家劫舍“的一种方法
Python实现“打家劫舍“的一种方法 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装有相互连通的防盗系统,如果两间相邻的房屋在同一晚上被小偷闯入,系统会自动报警 …...
)
【限时解密】某千亿级餐饮集团未公开的Agent故障熔断机制:37类异常场景自动降级策略(仅开放72小时技术文档下载)
更多请点击: https://intelliparadigm.com 第一章:AI Agent餐饮行业应用的演进逻辑与业务价值锚点 AI Agent在餐饮行业的落地并非技术驱动的线性叠加,而是由真实业务痛点牵引、数据基础设施成熟度支撑、人机协作范式迭代共同塑造的动态演进过…...

独立开发者如何借助Taotoken低成本试验多种大模型效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何借助Taotoken低成本试验多种大模型效果 对于独立开发者或小微团队而言,在创意验证或产品原型阶段&#…...

3步快速上手:Windows安卓应用安装器的终极指南
3步快速上手:Windows安卓应用安装器的终极指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾想在Windows电脑上直接运行安卓应用?告别…...

戴森球计划工厂蓝图仓库技术架构深度探索
戴森球计划工厂蓝图仓库技术架构深度探索 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints 在《戴森球计划》这款深受玩家喜爱的自动化工厂建造游戏中,工厂蓝图的…...

掌握AI写教材方法,低查重工具让教材编写变得如此简单!
许多教材编写者常感到失落,因为经过反复琢磨的教材内容,在缺乏相应的辅助资源时,教学效果往往大打折扣。课后练习的题型设计需要有层次感,但往往缺乏创新灵感;想要制作出直观的教学课件,却没有技术来实现&a…...

高性能混合数据聚类算法:k-prototypes架构设计与性能优化深度解析
高性能混合数据聚类算法:k-prototypes架构设计与性能优化深度解析 【免费下载链接】kmodes Python implementations of the k-modes and k-prototypes clustering algorithms, for clustering categorical data 项目地址: https://gitcode.com/gh_mirrors/km/kmod…...

5个步骤掌握ScriptHookV:GTA V脚本开发终极指南
5个步骤掌握ScriptHookV:GTA V脚本开发终极指南 【免费下载链接】ScriptHookV An open source hook into GTAV for loading offline mods 项目地址: https://gitcode.com/gh_mirrors/sc/ScriptHookV 你是否曾梦想过为GTA V创造属于自己的游戏模组?…...

技术解密:Godot RE Tools - 游戏逆向工程的智能解决方案
技术解密:Godot RE Tools - 游戏逆向工程的智能解决方案 【免费下载链接】gdsdecomp Godot reverse engineering tools 项目地址: https://gitcode.com/GitHub_Trending/gd/gdsdecomp Godot RE Tools 是一款专业的Godot游戏逆向工程工具,能够从AP…...

3分钟彻底清理Windows右键菜单:ContextMenuManager让你的操作效率翻倍
3分钟彻底清理Windows右键菜单:ContextMenuManager让你的操作效率翻倍 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 还在为Windows右键菜单越来越臃…...