I.MX6ULL_Linux_驱动篇(58)linux IIO驱动
工业场合里面也有大量的模拟量和数字量之间的转换,也就是我们常说的 ADC 和 DAC。而且随着手机、物联网、工业物联网和可穿戴设备的爆发,传感器的需求只持续增强。比如手机或者手环里面的加速度计、光传感器、陀螺仪、气压计、磁力计等,这些传感器本质上都是ADC,大家注意查看这些传感器的手册,会发现他们内部都会有个 ADC,传感器对外提供 IIC或者 SPI 接口, SOC 可以通过 IIC 或者 SPI 接口来获取到传感器内部的 ADC 数值,从而得到想要测量的结果。Linux 内核为了管理这些日益增多的 ADC 类传感器,特地推出了 IIO 子系统,本章我们就来学习如何使用 IIO 子系统来编写 ADC 类传感器驱动。
IIO 子系统简介
IIO 全称是 Industrial I/O,翻译过来就是工业 I/O,大家不要看到“工业”两个字就觉得 IIO是只用于工业领域的。大家一般在搜索 IIO 子系统的时候,会发现大多数讲的都是 ADC,这是因为 IIO 就是为 ADC 类传感器准备的,当然了 DAC 也是可以的。大家常用的陀螺仪、加速度计、电压/电流测量芯片、光照传感器、压力传感器等内部都是有个 ADC,内部 ADC 将原始的模拟数据转换为数字量,然后通过其他的通信接口,比如 IIC、 SPI 等传输给 SOC。因此,当你使用的传感器本质是 ADC 或 DAC 器件的时候,可以优先考虑使用 IIO 驱动框架。
iio_dev
IIO 子系统使用结构体 iio_dev 来描述一个具体 IIO 设备,此设备结构体定义在include/linux/iio/iio.h 文件中,结构体内容如下(有省略):
474 struct iio_dev {
475 int id;
476
477 int modes;
478 int currentmode;
479 struct device dev;
480
481 struct iio_event_interface *event_interface;
482
483 struct iio_buffer *buffer;
484 struct list_head buffer_list;
485 int scan_bytes;
486 struct mutex mlock;
487
488 const unsigned long *available_scan_masks;
489 unsigned masklength;
490 const unsigned long *active_scan_mask;
491 bool scan_timestamp;
492 unsigned scan_index_timestamp;
493 struct iio_trigger *trig;
494 struct iio_poll_func *pollfunc;
495
496 struct iio_chan_spec const *channels;
497 int num_channels;
498
499 struct list_head channel_attr_list;
500 struct attribute_group chan_attr_group;
501 const char *name;
502 const struct iio_info *info;
503 struct mutex info_exist_lock;
504 const struct iio_buffer_setup_ops *setup_ops;
505 struct cdev chrdev;
......
515 };我们来看一下 iio_dev 结构体中几个比较重要的成员变量:
第 477 行, modes 为设备支持的模式,可选择的模如表所示:
| 模式 | 描述 |
| INDIO_DIRECT_MODE | 提供 sysfs 接口。 |
| INDIO_BUFFER_TRIGGERED | 支持硬件缓冲触发。 |
| INDIO_BUFFER_SOFTWARE | 支持软件缓冲触发。 |
| INDIO_BUFFER_HARDWARE | 支持硬件缓冲区。 |
第 478 行, currentmode 为当前模式。
第 483 行, buffer 为缓冲区。
第 484 行, buffer_list 为当前匹配的缓冲区列表。
第 485 行, scan_bytes 为捕获到,并且提供给缓冲区的字节数。
第 488 行, available_scan_masks 为可选的扫描位掩码,使用触发缓冲区的时候可以通过设置掩码来确定使能哪些通道,使能以后的通道会将捕获到的数据发送到 IIO 缓冲区。
第 490 行, active_scan_mask 为缓冲区已经开启的通道掩码。只有这些使能了的通道数据才能被发送到缓冲区。
第 491 行, scan_timestamp 为扫描时间戳,如果使能以后会将捕获时间戳放到缓冲区里面。
第 493 行, trig 为 IIO 设备当前触发器,当使用缓冲模式的时候。
第 494 行, pollfunc 为一个函数,在接收到的触发器上运行。
第 496 行, channels 为 IIO 设备通道,为 iio_chan_spec 结构体类型,稍后会详细讲解 IIO通道。
第 497 行, num_channels 为 IIO 设备的通道数。
第 501 行, name 为 IIO 设备名字。
第 502 行, info 为 iio_info 结构体类型,这个结构体里面有很多函数,需要驱动开发人员编写,非常重要!我们从用户空间读取 IIO 设备内部数据,最终调用的就是 iio_info 里面的函数。稍后会详细讲解 iio_info 结构体。
第 504 行, setup_ops 为 iio_buffer_setup_ops 结构体类型,内容如下:
427 struct iio_buffer_setup_ops {
428 int (*preenable)(struct iio_dev *); /* 缓冲区使能之前调用 */
429 int (*postenable)(struct iio_dev *); /* 缓冲区使能之后调用 */
430 int (*predisable)(struct iio_dev *); /* 缓冲区禁用之前调用 */
431 int (*postdisable)(struct iio_dev *); /* 缓冲区禁用之后调用 */
432 bool (*validate_scan_mask)(struct iio_dev *indio_dev,
433 const unsigned long *scan_mask); /* 检查扫描掩码是否有效 */
434 };可以看出 iio_buffer_setup_ops 里面都是一些回调函数,在使能或禁用缓冲区的时候会调用这些函数。如果未指定的话就默认使用 iio_triggered_buffer_setup_ops。
继续回到示例代码中第 505 行, chrdev 为字符设备,由 IIO 内核创建。
iio_dev 申请与释放
在使用之前要先申请 iio_dev,申请函数为 iio_device_alloc,函数原型如下:
struct iio_dev *iio_device_alloc(int sizeof_priv)函数参数和返回值含义如下:
sizeof_priv: 私有数据内存空间大小,一般我们会将自己定义的设备结构体变量作为 iio_dev的私有数据,这样可以直接通过 iio_device_alloc 函数同时完成 iio_dev 和设备结构体变量的内存申请。 申请成功以后使用 iio_priv 函数来得到自定义的设备结构体变量首地址。
返回值:如果申请成功就返回 iio_dev 首地址,如果失败就返回 NULL。
一般 iio_device_alloc 和 iio_priv 之间的配合使用如下所示:
1 struct icm20608_dev *dev;
2 struct iio_dev *indio_dev;
3
4 /* 1、申请 iio_dev 内存 */
5 indio_dev = iio_device_alloc(sizeof(*dev));
6 if (!indio_dev)
7 return -ENOMEM;
8
9 /* 2、获取设备结构体变量地址 */
10 dev = iio_priv(indio_dev);第 1 行, icm20608_dev 是自定义的设备结构体。
第 2 行, indio_dev 是 iio_dev 结构体变量指针。
第 5 行,使用 iio_device_alloc 函数来申请 iio_dev,并且一起申请了 icm2060_dev 的内存。
第 10 行,使用 iio_priv 函数从 iio_dev 中提取出私有数据,也就是 icm2608_dev 这个自定义结构体变量首地址。
如果要释放 iio_dev,需要使用 iio_device_free 函数,函数原型如下:
void iio_device_free(struct iio_dev *indio_dev)函数参数和返回值含义如下:
indio_dev: 需要释放的 iio_dev。
返回值:无。
也 可 以 使 用 devm_iio_device_alloc 来 分 配 iio_dev , 这 样 就 不 需 要 我 们 手 动 调 用iio_device_free 函数完成 iio_dev 的释放工作。
iio_dev 注册与注销
前面分配好 iio_dev 以后就要初始化各种成员变量,初始化完成以后就需要将 iio_dev 注册到内核中,需要用到 iio_device_register 函数,函数原型如下:
int iio_device_register(struct iio_dev *indio_dev)函数参数和返回值含义如下:
indio_dev: 需要注册的 iio_dev。
返回值: 0,成功;其他值,失败。
如果要注销 iio_dev 使用 iio_device_unregister 函数,函数原型如下:
void iio_device_unregister(struct iio_dev *indio_dev)函数参数和返回值含义如下:
indio_dev: 需要注销的 iio_dev。
返回值: 0,成功;其他值,失败。
iio_info
iio_dev 有个成员变量: info,为 iio_info 结构体指针变量,这个是我们在编写 IIO 驱动的时候需要着重去实现的,因为用户空间对设备的具体操作最终都会反映到 iio_info 里面。 iio_info
结构体定义在 include/linux/iio/iio.h 中,结构体定义如下(有省略):
352 struct iio_info {
353 struct module *driver_module;
354 struct attribute_group *event_attrs;
355 const struct attribute_group *attrs;
356
357 int (*read_raw)(struct iio_dev *indio_dev,
358 struct iio_chan_spec const *chan,
359 int *val,
360 int *val2,
361 long mask);
......
369
370 int (*write_raw)(struct iio_dev *indio_dev,
371 struct iio_chan_spec const *chan,
372 int val,
373 int val2,
374 long mask);
375
376 int (*write_raw_get_fmt)(struct iio_dev *indio_dev,
377 struct iio_chan_spec const *chan,
378 long mask);
......
415 };第 355 行, attrs 是通用的设备属性。
第 357 和 370 行,分别为 read_raw 和 write_raw 函数,这两个函数就是最终读写设备内部数据的操作函数,需要程序编写人员去实现的。比如应用读取一个陀螺仪传感器的原始数据,那么最终完成工作的就是 read_raw 函数,我们需要在 read_raw 函数里面实现对陀螺仪芯片的读取操作。同理, write_raw 是应用程序向陀螺仪芯片写数据,一般用于配置芯片,比如量程、数据速率等。这两个函数的参数都是一样的,我们依次来看一下:
indio_dev: 需要读写的 IIO 设备。
chan:需要读取的通道。
val, val2:对于 read_raw 函数来说 val 和 val2 这两个就是应用程序从内核空间读取到数据,一般就是传感器指定通道值,或者传感器的量程、分辨率等。对于 write_raw 来说就是应用程序向设备写入的数据。 val 和 val2 共同组成具体值, val 是整数部分, val2 是小数部分。但是val2 也是对具体的小数部分扩大 N 倍后的整数值,因为不能直接从内核向应用程序返回一个小数值。比如现在有个值为 1.00236,那么 val 就是 1, vla2 理论上来讲是 0.00236,但是我们需要对 0.00236 扩大 N 倍,使其变为整数,这里我们扩大 1000000 倍,那么 val2 就是 2360。因此val=1, val2=2360。扩大的倍数我们不能随便设置,而是要使用 Linux 定义的倍数, Linux 内核里面定义的数据扩大倍数,或者说数据组合形式如表所示:
| 组合宏 | 描述 |
| IIO_VAL_INT | 整数值,没有小数。比如 5000,那么就是 val=5000,不 需要设置 val2 |
| IIO_VAL_INT_PLUS_MICRO | 小数部分扩大 1000000 倍,比如 1.00236,此时 val=1, val2=2360。 |
| IIO_VAL_INT_PLUS_NANO | 小数部分扩大 1000000000 倍,同样是 1.00236,此时 val=1, val2=2360000。 |
| IIO_VAL_INT_PLUS_MICRO_DB | dB 数据,和 IIO_VAL_INT_PLUS_MICRO 数据形式一 样,只是在后面添加 db。 |
| IIO_VAL_INT_MULTIPLE | 多个整数值,比如一次要传回 6 个整数值,那么 val 和 val2就不够用了。此宏主要用于iio_info的read_raw_multi 函数。 |
| IIO_VAL_FRACTIONAL | 分数值,也就是 val/val2。比如 val=1, val2=4,那么实际 值就是 1/4。 |
| IIO_VAL_FRACTIONAL_LOG2 | 值为 val>>val2,也就是 val 右移 val2 位。比如 val=25600, val2=4 , 那 么 真 正 的 值 就 是 25600 右 移 4 位 , 25600>>4=1600. |
mask: 掩码,用于指定我们读取的是什么数据,比如 ICM20608 这样的传感器,他既有原始的测量数据,比如 X,Y,Z 轴的陀螺仪、加速度计等,也有测量范围值,或者分辨率。比如加速度计测量范围设置为±16g,那么分辨率就是 32/65536≈0.000488,我们只有读出原始值以及对应的分辨率(量程),才能计算出真实的重力加速度。此时就有两种数据值:传感器原始值、分辨率。 Linux 内核使用 IIO_CHAN_INFO_RAW 和 IIO_CHAN_INFO_SCALE 这两个宏来表示原始值以及分辨率,这两个宏就是掩码。至于每个通道可以采用哪几种掩码,这个在我们初始化通道的时候需要驱动编写人员设置好。掩码有很多种,稍后讲解 IIO 通道的时候详细讲解!
第 376 行的 write_raw_get_fmt 用于设置用户空间向内核空间写入的数据格式,write_raw_get_fmt 函数决定了 wtite_raw 函数中 val 和 val2 的意义,也就是表中的组合形式。比如我们需要在应用程序中设置 ICM20608 加速度计的量程为± 8g,那么分辨率就是16/65536 ≈ 0.000244 ,我们 在 write_raw_get_fmt 函数 里面设置 加速度计的数 据格式 为IIO_VAL_INT_PLUS_MICRO。那么我们在应用程序里面向指定的文件写入 0.000244 以后,最终传递给内核驱动的就是 0.000244*1000000=244。也就是 write_raw 函数的 val 参数为 0, val2参数为 244。
iio_chan_spec
IIO 的核心就是通道,一个传感器可能有多路数据,比如一个 ADC 芯片支持 8 路采集,那么这个 ADC 就有 8 个通道。我们本章实验用到的 ICM20608,这是一个六轴传感器,可以输出三轴陀螺仪(X、 Y、 Z)、三轴加速度计(X、 Y、 Z)和一路温度,也就是一共有 7 路数据,因此就有 7 个通道。注意,三轴陀螺仪或加速度计的 X、 Y、 Z 这三个轴,每个轴都算一个通道。
Linux 内核使用 iio_chan_spec 结构体来描述通道,定义在 include/linux/iio/iio.h 文件中,内容如下:
223 struct iio_chan_spec {
224 enum iio_chan_type type;
225 int channel;
226 int channel2;
227 unsigned long address;
228 int scan_index;
229 struct {
230 char sign;
231 u8 realbits;
232 u8 storagebits;
233 u8 shift;
234 u8 repeat;
235 enum iio_endian endianness;
236 } scan_type;
237 long info_mask_separate;
238 long info_mask_shared_by_type;
239 long info_mask_shared_by_dir;
240 long info_mask_shared_by_all;
241 const struct iio_event_spec *event_spec;
242 unsigned int num_event_specs;
243 const struct iio_chan_spec_ext_info *ext_info;
244 const char *extend_name;
245 const char *datasheet_name;
246 unsigned modified:1;
247 unsigned indexed:1;
248 unsigned output:1;
249 unsigned differential:1;
250 };来看一下 iio_chan_spec 结构体中一些比较重要的成员变量:
第 224 行, type 为通道类型, iio_chan_type 是一个枚举类型,列举出了可以选择的通道类型,定义在 include/uapi/linux/iio/types.h 文件里面,内容如下:
13 enum iio_chan_type {
14 IIO_VOLTAGE, /* 电压类型 */
15 IIO_CURRENT, /* 电流类型 */
16 IIO_POWER, /* 功率类型 */
17 IIO_ACCEL, /* 加速度类型 */
18 IIO_ANGL_VEL, /* 角度类型(陀螺仪) */
19 IIO_MAGN, /* 电磁类型(磁力计) */
20 IIO_LIGHT, /* 灯光类型 */
21 IIO_INTENSITY, /* 强度类型(光强传感器) */
22 IIO_PROXIMITY, /* 接近类型(接近传感器) */
23 IIO_TEMP, /* 温度类型 */
24 IIO_INCLI, /* 倾角类型(倾角测量传感器) */
25 IIO_ROT, /* 旋转角度类型 */
26 IIO_ANGL, /* 转动角度类型(电机旋转角度测量传感器) */
27 IIO_TIMESTAMP, /* 时间戳类型 */
28 IIO_CAPACITANCE, /* 电容类型 */
29 IIO_ALTVOLTAGE, /* 频率类型 */
30 IIO_CCT, /* 笔者暂时未知的类型 */
31 IIO_PRESSURE, /* 压力类型 */
32 IIO_HUMIDITYRELATIVE, /* 湿度类型 */
33 IIO_ACTIVITY, /* 活动类型(计步传感器) */
34 IIO_STEPS, /* 步数类型 */
35 IIO_ENERGY, /* 能量类型(卡路里) */
36 IIO_DISTANCE, /* 距离类型 */
37 IIO_VELOCITY, /* 速度类型 */
38 };从上述类型可以看出,目前 Linux 内核支持的传感器类型非常丰富,而且支持类型也会不断的增加。如果是 ADC,那就是 IIO_VOLTAGE 类型。如果是 ICM20608 这样的多轴传感器,那么就是复合类型了,陀螺仪部分是 IIO_ANGL_VEL 类型,加速度计部分是IIO_ACCEL 类型,温度部分就是 IIO_TEMP。
继续来看 iio_chan_spec 结构体,第 225 行,当成员变量 indexed 为 1时候, channel 为通道索引。
第 226 行,当成员变量 modified 为 1 的时候, channel2 为通道修饰符。 Linux 内核给出了可用的通道修饰符,定义在 include/uapi/linux/iio/types.h 文件里面,内容如下(有省略)
40 enum iio_modifier {
41 IIO_NO_MOD,
42 IIO_MOD_X, /* X 轴 */
43 IIO_MOD_Y, /* Y 轴 */
44 IIO_MOD_Z, /* Z 轴 */
......
73 };比如 ICM20608 的加速度计部分,类型设置为 IIO_ACCEL, X、Y、 Z 这三个轴就用 channel2的通道修饰符来区分。 IIO_MOD_X、 IIO_MOD_Y、 IIO_MOD_Z 就分别对应 X、 Y、 Z 这三个轴。通道修饰符主要是影响 sysfs 下的通道文件名字,后面我们会讲解 sysfs 下通道文件名字组成形式。
继续回到iio_chan_spec ,第 227 行的 address 成员变量用户可以自定义,但是一般会设置为此通道对应的芯片数据寄存器地址。比如 ICM20608 的加速度计 X 轴这个通道,它的数据首地址就是 0X3B。 address 也可以用作其他功能,自行选择,也可以不使用 address,一切以实际情况为准。
第 228 行,当使用触发缓冲区的时候, scan_index 是扫描索引。
第 229~236, scan_type 是一个结构体,描述了扫描数据在缓冲区中的存储格式。我们依次来看一下 scan_type 各个成员变量的涵义:
scan_type.sign:如果为‘u’表示数据为无符号类型,为‘s’的话为有符号类型。
scan_type.realbits:数据真实的有效位数,比如很多传感器说的 10 位 ADC,其真实有效数据就是 10 位。
scan_type.storagebits:存储位数,有效位数+填充位。比如有些传感器 ADC 是 12 位的,那么我们存储的话肯定要用到 2 个字节,也就是 16 位,这 16 位就是存储位数。
scan_type.shift:右移位数,也就是存储位数和有效位数不一致的时候,需要右移的位数,这个参数不总是需要,一切以实际芯片的数据手册位数。
scan_type.repeat:实际或存储位的重复数量。
scan_type.endianness:数据的大小端模式,可设置为 IIO_CPU、 IIO_BE(大端)或 IIO_LE(小端)。
第 237 行, info_mask_separate 标记某些属性专属于此通道, include/linux/iio/types.h 文件中的 iio_chan_info_enum 枚举类型描述了可选的属性值,如下所示:
23 enum iio_chan_info_enum {
24 IIO_CHAN_INFO_RAW = 0,
25 IIO_CHAN_INFO_PROCESSED,
26 IIO_CHAN_INFO_SCALE,
27 IIO_CHAN_INFO_OFFSET,
......
45 IIO_CHAN_INFO_DEBOUNCE_TIME,
46 };比如 ICM20608 加速度计的 X、 Y、 Z 这三个轴,在 sysfs 下这三个轴肯定是对应三个不同的文件,我们通过读取这三个文件就能得到每个轴的原始数据。 IIO_CHAN_INFO_RAW 这个属
性表示原始数据,当我们在配置 X、 Y、 Z 这三个通道的时候,在 info_mask_separate 中使能IIO_CHAN_INFO_RAW 这个属性,那么就表示在 sysfs 下生成三个不同的文件分别对应 X、 Y、
Z 轴,这三个轴的 IIO_CHAN_INFO_RAW 属性是相互独立的。
第 238 行, info_mask_shared_by_type 标记导出的信息由相同类型的通道共享。也就是iio_chan_spec.type 成员变量相同的通道。比如 ICM20608 加速度计的 X、 Y、 Z 轴他们的 type 都
是 IIO_ACCEL,也就是类型相同。而这三个轴的分辨率(量程)是一样的,那么在配置这三个通道的时候就可以在 info_mask_shared_by_type 中使能 IIO_CHAN_INFO_SCALE 这个属性,表示
这三个通道的分辨率是共用的,这样在 sysfs 下就会只生成一个描述分辨率的文件,这三个通道都可以使用这一个分辨率文件。
第 239 行, info_mask_shared_by_dir 标记某些导出的信息由相同方向的通道共享。
第 240 行, info_mask_shared_by_all 表设计某些信息所有的通道共享,无论这些通道的类型、方向如何,全部共享。
第 246 行, modified 为 1 的时候, channel2 为通道修饰符。
第 247 行, indexed 为 1 的时候, channel 为通道索引。
第 248 行, output 表示为输出通道。
第 249 行, differential 表示为差分通道。
IIO 驱动框架创建
前面我们已经对 IIO 设备、 IIO 通道进行了详细的讲解,本节我们就来学习如何搭建 IIO 驱动框架。在上一小节分析 IIO 子系统的时候大家应该看出了, IIO 框架主要用于 ADC 类的传感器,比如陀螺仪、加速度计、磁力计、光强度计等,这些传感器基本都是 IIC 或者 SPI 接口的。因此 IIO 驱动的基础框架就是 IIC 或者 SPI,我们可以在 IIC 或 SPI 驱动里面在加上上一章讲解的 regmap。当然了,有些 SOC 内部的 ADC 也会使用 IIO 框架,那么这个时候驱动的基础框架就是 platfrom。
我们以 SPI 接口为例,首先是 SPI 驱动框架,如下所示:
1 /*
2 * @description : spi 驱动的 probe 函数,当驱动与
3 * 设备匹配以后此函数就会执行
4 * @param - spi : spi 设备
5 * @return : 0,成功;其他值,失败
6 */
7 static int xxx_probe(struct spi_device *spi)
8 {
9 return 0;
10 }
11
12 /*
13 * @description : spi 驱动的 remove 函数,移除 spi 驱动的时候此函数会执行
14 * @param - spi : spi 设备
15 * @return : 0,成功;其他负值,失败
16 */
17 static int xxx_remove(struct spi_device *spi)
18 {
19 return 0;
20 }
21
22 /* 传统匹配方式 ID 列表 */
23 static const struct spi_device_id xxx_id[] = {
24 {"alientek,xxx", 0},
25 {}
26 };
27
28 /* 设备树匹配列表 */
29 static const struct of_device_id xxx_of_match[] = {
30 { .compatible = "alientek,xxx" },
31 { /* Sentinel */ }
32 };
33
34 /* SPI 驱动结构体 */
35 static struct spi_driver xxx_driver = {
36 .probe = xxx_probe,
37 .remove = xxx_remove,
38 .driver = {
39 .owner = THIS_MODULE,
40 .name = "xxx",
41 .of_match_table = xxx_of_match,
42 },
43 .id_table = xxx_id,
44 };
45
46 /*
47 * @description : 驱动入口函数
48 * @param : 无
49 * @return : 无
50 */
51 static int __init xxx_init(void)
52 {
53 return spi_register_driver(&xxx_driver);
54 }
55
56 /*
57 * @description : 驱动出口函数
58 * @param : 无
59 * @return : 无
60 */
61 static void __exit xxx_exit(void)
62 {
63 spi_unregister_driver(&xxx_driver);
64 }
65
66 module_init(xxx_init);
67 module_exit(xxx_exit);
68 MODULE_LICENSE("GPL");
69 MODULE_AUTHOR("ALIENTEK");IIO 设备申请与初始化
IIO 设备的申请、初始化以及注册在 probe 函数中完成,在注销驱动的时候还需要在 remove函数中注销掉 IIO 设备、释放掉申请的一些内存。添加完 IIO 框架以后的 probe 和 remove 函数如下所示:
1 /* 自定义设备结构体 */
2 struct xxx_dev {
3 struct spi_device *spi; /* spi 设备 */
4 struct regmap *regmap; /* regmap */
5 struct regmap_config regmap_config;
6 struct mutex lock;
7 };
8
9 /*
10 * 通道数组
11 */
12 static const struct iio_chan_spec xxx_channels[] = {
13
14 };
15
16 /*
17 * @description : 读函数,当读取 sysfs 中的文件的时候最终此函数会执行,
18 * :此函数里面会从传感器里面读取各种数据,然后上传给应用。
19 * @param - indio_dev : IIO 设备
20 * @param - chan : 通道
21 * @param - val : 读取的值,如果是小数值的话, val 是整数部分。
22 * @param - val2 : 读取的值,如果是小数值的话, val2 是小数部分。
23 * @param - mask : 掩码。
24 * @return : 0,成功;其他值,错误
25 */
26 static int xxx_read_raw(struct iio_dev *indio_dev,
27 struct iio_chan_spec const *chan,
28 int *val, int *val2, long mask)
29 {
30 return 0;
31 }
32
33 /*
34 * @description : 写函数,当向 sysfs 中的文件写数据的时候最终此函数
35 * :会执行,一般在此函数里面设置传感器,比如量程等。
36 * @param - indio_dev : IIO 设备
37 * @param - chan : 通道
38 * @param - val : 应用程序写入值,如果是小数的话, val 是整数部分。
39 * @param - val2 : 应用程序写入值,如果是小数的话, val2 是小数部分。
40 * @return : 0,成功;其他值,错误
41 */
42 static int xxx_write_raw(struct iio_dev *indio_dev,
43 struct iio_chan_spec const *chan,
44 int val, int val2, long mask)
45 {
46 return 0;
47 }
48
49 /*
50 * @description : 用户空间写数据格式,比如我们在用户空间操作 sysfs 来设
51 * :置传感器的分辨率,如果分辨率带小数,那么这个小数传递到
52 * : 内核空间应该扩大多少倍,此函数就是用来设置这个的。
53 * @param - indio_dev : iio_dev
54 * @param - chan : 通道
55 * @param - mask : 掩码
56 * @return : 0,成功;其他值,错误
57 */
58 static int xxx_write_raw_get_fmt(struct iio_dev *indio_dev,
59 struct iio_chan_spec const *chan, long mask)
60 {
61 return 0;
62 }
63
64 /*
65 * iio_info 结构体变量
66 */
67 static const struct iio_info xxx_info = {
68 .read_raw = xxx_read_raw,
69 .write_raw = xxx_write_raw,
70 .write_raw_get_fmt = &xxx_write_raw_get_fmt,
71 };
72
73 /*
74 * @description : spi 驱动的 probe 函数,当驱动与
75 * 设备匹配以后此函数就会执行
76 * @param - spi : spi 设备
77 *
78 */
79 static int xxx_probe(struct spi_device *spi)
80 {
81 int ret;
82 struct xxx_dev *data;
83 struct iio_dev *indio_dev;
84
85 /* 1、申请 iio_dev 内存 */
86 indio_dev = devm_iio_device_alloc(&spi->dev, sizeof(*data));
87 if (!indio_dev)
88 return -ENOMEM;
89
90 /* 2、获取 xxx_dev 结构体地址 */
91 data = iio_priv(indio_dev);
92 data->spi = spi;
93 spi_set_drvdata(spi, indio_dev);
94 mutex_init(&data->lock);
95
96 /* 3、初始化 iio_dev 成员变量 */
97 indio_dev->dev.parent = &spi->dev;
98 indio_dev->info = &xxx_info;
99 indio_dev->name = "xxx";
100 indio_dev->modes = INDIO_DIRECT_MODE; /* 直接模式 /
101 indio_dev->channels = xxx_channels;
102 indio_dev->num_channels = ARRAY_SIZE(xxx_channels);
103
104 iio_device_register(indio_dev);
105
106 /* 4、 regmap 相关设置 */
107
108 /* 5、 SPI 相关设置*/
109
110 /* 6、芯片初始化 */
111
112 return 0;
113
114 }
115
116 /*
117 * @description : spi 驱动的 remove 函数,移除 spi 驱动的时候此函数会执行
118 * @param - spi : spi 设备
119 * @return : 0,成功;其他负值,失败
120 */
121 static int xxx_remove(struct spi_device *spi)
122 {
123 struct iio_dev *indio_dev = spi_get_drvdata(spi);
124 struct xxx_dev *data;
125
126 data = iio_priv(indio_dev); ;
127
128 /* 1、其他资源的注销以及释放 */
129
130 /* 2、注销 IIO */
131 iio_device_unregister(indio_dev);
132
133 return 0;
134 }第 2~7 行,用户自定义的设备结构体。
第 12 行, IIO 通道数组。
第 16~71 行, 这部分为 iio_info,当应用程序读取相应的驱动文件的时候, xxx_read_raw函数就会执行,我们在此函数中会读取传感器数据,然后返回给应用层。当应用层向相应的驱动写数据的时候, xxx_write_raw 函数就会执行。因此 xxx_read_raw 和 xxx_write_raw 这两个函数是非常重要的!需要我们根据具体的传感器来编写,这两个函数是编写 IIO 驱动的核心。
第 79~114 行, xxx_probe 函数,此函数的核心就是分配并初始化 iio_dev,最后向内核注册iio_dev。
第 86 行调用 devm_iio_device_alloc 函数分配 iio_dev 内存,这里连用户自定义的设备结构体变量内存一起申请了。
第 91 行调用 iio_priv 函数从 iio_dev 中提取出私有数据,这个私有数据就是设备结构体变量。
第 97~102 行初始化 iio_dev,重点是第 98 行设置 iio_dev 的 info成员变量。
第 101 行设置 iio_dev 的通道。初始化完成以后就要调用 iio_device_register 函数向内核注册 iio_dev。整个过程就是:申请 iio_dev、初始化、注册,和我们前面讲解的其他驱动框架步骤一样。
第 121~134 行, xxx_remove 函数里面需要做的就是释放 xxx_probe 函数申请到的 IIO 相关资源,比如第 131 行,使用 iio_device_unregister 注销掉前面注册的 iio_dev。由于前面我们使用
devm_iio_device_alloc 函数申请的 iio_dev,因此不需要在 remove 函数中手动释放 iio_dev。
IIO 框架示例就讲解到这里,剩下的就是根据所使用的具体传感器,在 IIO 驱动框架里面添加相关的处理,接下来我们就以正点原子 I.MX6ULL 开发板上的 ICM20608 为例,进行 IIO 驱动实战!
实验
驱动代码:
#include <linux/spi/spi.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/platform_device.h>
#include "icm20608reg.h"
#include <linux/gpio.h>
#include <linux/device.h>
#include <asm/uaccess.h>
#include <linux/cdev.h>
#include <linux/regmap.h>
#include <linux/iio/iio.h>
#include <linux/iio/sysfs.h>
#include <linux/iio/buffer.h>
#include <linux/iio/trigger.h>
#include <linux/iio/triggered_buffer.h>
#include <linux/iio/trigger_consumer.h>
#include <linux/unaligned/be_byteshift.h>#define ICM20608_NAME "icm20608"
#define ICM20608_TEMP_OFFSET 0
#define ICM20608_TEMP_SCALE 326800000#define ICM20608_CHAN(_type, _channel2, _index) \{ \.type = _type, \.modified = 1, \.channel2 = _channel2, \.info_mask_shared_by_type = BIT(IIO_CHAN_INFO_SCALE), \.info_mask_separate = BIT(IIO_CHAN_INFO_RAW) | \BIT(IIO_CHAN_INFO_CALIBBIAS), \.scan_index = _index, \.scan_type = { \.sign = 's', \.realbits = 16, \.storagebits = 16, \.shift = 0, \.endianness = IIO_BE, \}, \}/* * ICM20608的扫描元素,3轴加速度计、* 3轴陀螺仪、1路温度传感器,1路时间戳 */
enum inv_icm20608_scan {INV_ICM20608_SCAN_ACCL_X,INV_ICM20608_SCAN_ACCL_Y,INV_ICM20608_SCAN_ACCL_Z,INV_ICM20608_SCAN_TEMP,INV_ICM20608_SCAN_GYRO_X,INV_ICM20608_SCAN_GYRO_Y,INV_ICM20608_SCAN_GYRO_Z,INV_ICM20608_SCAN_TIMESTAMP,
};struct icm20608_dev {struct spi_device *spi; /* spi设备 */struct regmap *regmap; /* regmap */struct regmap_config regmap_config; struct mutex lock;
};/** icm20608陀螺仪分辨率,对应250、500、1000、2000,计算方法:* 以正负250度量程为例,500/2^16=0.007629,扩大1000000倍,就是7629*/
static const int gyro_scale_icm20608[] = {7629, 15258, 30517, 61035};/* * icm20608加速度计分辨率,对应2、4、8、16 计算方法:* 以正负2g量程为例,4/2^16=0.000061035,扩大1000000000倍,就是61035*/
static const int accel_scale_icm20608[] = {61035, 122070, 244140, 488281};/** icm20608通道,1路温度通道,3路陀螺仪,3路加速度计*/
static const struct iio_chan_spec icm20608_channels[] = {/* 温度通道 */{.type = IIO_TEMP,.info_mask_separate = BIT(IIO_CHAN_INFO_RAW)| BIT(IIO_CHAN_INFO_OFFSET)| BIT(IIO_CHAN_INFO_SCALE),.scan_index = INV_ICM20608_SCAN_TEMP,.scan_type = {.sign = 's',.realbits = 16,.storagebits = 16,.shift = 0,.endianness = IIO_BE,},},ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_X, INV_ICM20608_SCAN_GYRO_X), /* 陀螺仪X轴 */ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_Y, INV_ICM20608_SCAN_GYRO_Y), /* 陀螺仪Y轴 */ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_Z, INV_ICM20608_SCAN_GYRO_Z), /* 陀螺仪Z轴 */ICM20608_CHAN(IIO_ACCEL, IIO_MOD_Y, INV_ICM20608_SCAN_ACCL_Y), /* 加速度X轴 */ICM20608_CHAN(IIO_ACCEL, IIO_MOD_X, INV_ICM20608_SCAN_ACCL_X), /* 加速度Y轴 */ICM20608_CHAN(IIO_ACCEL, IIO_MOD_Z, INV_ICM20608_SCAN_ACCL_Z), /* 加速度Z轴 */
};/** @description : 读取icm20608指定寄存器值,读取一个寄存器* @param - dev: icm20608设备* @param - reg: 要读取的寄存器* @return : 读取到的寄存器值*/
static unsigned char icm20608_read_onereg(struct icm20608_dev *dev, u8 reg)
{u8 ret;unsigned int data;ret = regmap_read(dev->regmap, reg, &data);return (u8)data;
}/** @description : 向icm20608指定寄存器写入指定的值,写一个寄存器* @param - dev: icm20608设备* @param - reg: 要写的寄存器* @param - data: 要写入的值* @return : 无*/
static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg, u8 value)
{regmap_write(dev->regmap, reg, value);
}/** @description : ICM20608内部寄存器初始化函数 * @param - spi : 要操作的设备* @return : 无*/
void icm20608_reginit(struct icm20608_dev *dev)
{u8 value = 0;icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x80);mdelay(50);icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x01);mdelay(50);value = icm20608_read_onereg(dev, ICM20_WHO_AM_I);printk("ICM20608 ID = %#X\r\n", value); icm20608_write_onereg(dev, ICM20_SMPLRT_DIV, 0x00); /* 输出速率是内部采样率 */icm20608_write_onereg(dev, ICM20_GYRO_CONFIG, 0x18); /* 陀螺仪±2000dps量程 */icm20608_write_onereg(dev, ICM20_ACCEL_CONFIG, 0x18); /* 加速度计±16G量程 */icm20608_write_onereg(dev, ICM20_CONFIG, 0x04); /* 陀螺仪低通滤波BW=20Hz */icm20608_write_onereg(dev, ICM20_ACCEL_CONFIG2, 0x04); /* 加速度计低通滤波BW=21.2Hz */icm20608_write_onereg(dev, ICM20_PWR_MGMT_2, 0x00); /* 打开加速度计和陀螺仪所有轴 */icm20608_write_onereg(dev, ICM20_LP_MODE_CFG, 0x00); /* 关闭低功耗 */icm20608_write_onereg(dev, ICM20_INT_ENABLE, 0x01); /* 使能FIFO溢出以及数据就绪中断 */
}/** @description : 设置ICM20608传感器,可以用于陀螺仪、加速度计设置* @param - dev : icm20608设备 * @param - reg : 要设置的通道寄存器首地址。* @param - anix : 要设置的通道,比如X,Y,Z。* @param - val : 要设置的值。* @return : 0,成功;其他值,错误*/
static int icm20608_sensor_set(struct icm20608_dev *dev, int reg,int axis, int val)
{int ind, result;__be16 d = cpu_to_be16(val);ind = (axis - IIO_MOD_X) * 2;result = regmap_bulk_write(dev->regmap, reg + ind, (u8 *)&d, 2);if (result)return -EINVAL;return 0;
}/** @description : 读取ICM20608传感器数据,可以用于陀螺仪、加速度计、温度的读取* @param - dev : icm20608设备 * @param - reg : 要读取的通道寄存器首地址。* @param - anix : 需要读取的通道,比如X,Y,Z。* @param - val : 保存读取到的值。* @return : 0,成功;其他值,错误*/
static int icm20608_sensor_show(struct icm20608_dev *dev, int reg,int axis, int *val)
{int ind, result;__be16 d;ind = (axis - IIO_MOD_X) * 2;result = regmap_bulk_read(dev->regmap, reg + ind, (u8 *)&d, 2);if (result)return -EINVAL;*val = (short)be16_to_cpup(&d);return IIO_VAL_INT;
}/** @description : 读取ICM20608陀螺仪、加速度计、温度通道值* @param - indio_dev : iio设备 * @param - chan : 通道。* @param - val : 保存读取到的通道值。* @return : 0,成功;其他值,错误*/
static int icm20608_read_channel_data(struct iio_dev *indio_dev,struct iio_chan_spec const *chan,int *val)
{struct icm20608_dev *dev = iio_priv(indio_dev);int ret = 0;switch (chan->type) {case IIO_ANGL_VEL: /* 读取陀螺仪数据 */ret = icm20608_sensor_show(dev, ICM20_GYRO_XOUT_H, chan->channel2, val); /* channel2为X、Y、Z轴 */break;case IIO_ACCEL: /* 读取加速度计数据 */ret = icm20608_sensor_show(dev, ICM20_ACCEL_XOUT_H, chan->channel2, val); /* channel2为X、Y、Z轴 */break;case IIO_TEMP: /* 读取温度 */ret = icm20608_sensor_show(dev, ICM20_TEMP_OUT_H, IIO_MOD_X, val); break;default:ret = -EINVAL;break;}return ret;
}/** @description : 设置ICM20608的陀螺仪计量程(分辨率)* @param - dev : icm20608设备* @param - val : 量程(分辨率值)。* @return : 0,成功;其他值,错误*/
static int icm20608_write_gyro_scale(struct icm20608_dev *dev, int val)
{int result, i;u8 d;for (i = 0; i < ARRAY_SIZE(gyro_scale_icm20608); ++i) {if (gyro_scale_icm20608[i] == val) {d = (i << 3);result = regmap_write(dev->regmap, ICM20_GYRO_CONFIG, d);if (result)return result;return 0;}}return -EINVAL;
}/** @description : 设置ICM20608的加速度计量程(分辨率)* @param - dev : icm20608设备* @param - val : 量程(分辨率值)。* @return : 0,成功;其他值,错误*/
static int icm20608_write_accel_scale(struct icm20608_dev *dev, int val)
{int result, i;u8 d;for (i = 0; i < ARRAY_SIZE(accel_scale_icm20608); ++i) {if (accel_scale_icm20608[i] == val) {d = (i << 3);result = regmap_write(dev->regmap, ICM20_ACCEL_CONFIG, d);if (result)return result;return 0;}}return -EINVAL;
}/** @description : 读函数,当读取sysfs中的文件的时候最终此函数会执行,此函数* :里面会从传感器里面读取各种数据,然后上传给应用。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - val : 读取的值,如果是小数值的话,val是整数部分。* @param - val2 : 读取的值,如果是小数值的话,val2是小数部分。* @param - mask : 掩码。* @return : 0,成功;其他值,错误*/
static int icm20608_read_raw(struct iio_dev *indio_dev,struct iio_chan_spec const *chan,int *val, int *val2, long mask)
{struct icm20608_dev *dev = iio_priv(indio_dev);int ret = 0;unsigned char regdata = 0;switch (mask) {case IIO_CHAN_INFO_RAW: /* 读取ICM20608加速度计、陀螺仪、温度传感器原始值 */mutex_lock(&dev->lock); /* 上锁 */ret = icm20608_read_channel_data(indio_dev, chan, val); /* 读取通道值 */mutex_unlock(&dev->lock); /* 释放锁 */return ret;case IIO_CHAN_INFO_SCALE:switch (chan->type) {case IIO_ANGL_VEL:mutex_lock(&dev->lock);regdata = (icm20608_read_onereg(dev, ICM20_GYRO_CONFIG) & 0X18) >> 3;*val = 0;*val2 = gyro_scale_icm20608[regdata];mutex_unlock(&dev->lock);return IIO_VAL_INT_PLUS_MICRO; /* 值为val+val2/1000000 */case IIO_ACCEL:mutex_lock(&dev->lock);regdata = (icm20608_read_onereg(dev, ICM20_ACCEL_CONFIG) & 0X18) >> 3;*val = 0;*val2 = accel_scale_icm20608[regdata];;mutex_unlock(&dev->lock);return IIO_VAL_INT_PLUS_NANO;/* 值为val+val2/1000000000 */case IIO_TEMP: *val = ICM20608_TEMP_SCALE/ 1000000;*val2 = ICM20608_TEMP_SCALE % 1000000;return IIO_VAL_INT_PLUS_MICRO; /* 值为val+val2/1000000 */default:return -EINVAL;}return ret;case IIO_CHAN_INFO_OFFSET: /* ICM20608温度传感器offset值 */switch (chan->type) {case IIO_TEMP:*val = ICM20608_TEMP_OFFSET;return IIO_VAL_INT;default:return -EINVAL;}return ret;case IIO_CHAN_INFO_CALIBBIAS: /* ICM20608加速度计和陀螺仪校准值 */switch (chan->type) {case IIO_ANGL_VEL: /* 陀螺仪的校准值 */mutex_lock(&dev->lock);ret = icm20608_sensor_show(dev, ICM20_XG_OFFS_USRH, chan->channel2, val);mutex_unlock(&dev->lock);return ret;case IIO_ACCEL: /* 加速度计的校准值 */mutex_lock(&dev->lock); ret = icm20608_sensor_show(dev, ICM20_XA_OFFSET_H, chan->channel2, val);mutex_unlock(&dev->lock);return ret;default:return -EINVAL;}default:return ret -EINVAL;}
} /** @description : 写函数,当向sysfs中的文件写数据的时候最终此函数会执行,一般在此函数* :里面设置传感器,比如量程等。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - val : 应用程序写入的值,如果是小数值的话,val是整数部分。* @param - val2 : 应用程序写入的值,如果是小数值的话,val2是小数部分。* @return : 0,成功;其他值,错误*/
static int icm20608_write_raw(struct iio_dev *indio_dev,struct iio_chan_spec const *chan,int val, int val2, long mask)
{struct icm20608_dev *dev = iio_priv(indio_dev);int ret = 0;switch (mask) {case IIO_CHAN_INFO_SCALE: /* 设置陀螺仪和加速度计的分辨率 */switch (chan->type) {case IIO_ANGL_VEL: /* 设置陀螺仪 */mutex_lock(&dev->lock);ret = icm20608_write_gyro_scale(dev, val2);mutex_unlock(&dev->lock);break;case IIO_ACCEL: /* 设置加速度计 */mutex_lock(&dev->lock);ret = icm20608_write_accel_scale(dev, val2);mutex_unlock(&dev->lock);break;default:ret = -EINVAL;break;}break;case IIO_CHAN_INFO_CALIBBIAS: /* 设置陀螺仪和加速度计的校准值*/switch (chan->type) {case IIO_ANGL_VEL: /* 设置陀螺仪校准值 */mutex_lock(&dev->lock);ret = icm20608_sensor_set(dev, ICM20_XG_OFFS_USRH,chan->channel2, val);mutex_unlock(&dev->lock);break;case IIO_ACCEL: /* 加速度计校准值 */mutex_lock(&dev->lock);ret = icm20608_sensor_set(dev, ICM20_XA_OFFSET_H,chan->channel2, val);mutex_unlock(&dev->lock);break;default:ret = -EINVAL;break;}break;default:ret = -EINVAL;break;}return ret;
}/** @description : 用户空间写数据格式,比如我们在用户空间操作sysfs来设置传感器的分辨率,* :如果分辨率带小数,那么这个小数传递到内核空间应该扩大多少倍,此函数就是* : 用来设置这个的。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - mask : 掩码* @return : 0,成功;其他值,错误*/
static int icm20608_write_raw_get_fmt(struct iio_dev *indio_dev,struct iio_chan_spec const *chan, long mask)
{switch (mask) {case IIO_CHAN_INFO_SCALE:switch (chan->type) {case IIO_ANGL_VEL: /* 用户空间写的陀螺仪分辨率数据要乘以1000000 */return IIO_VAL_INT_PLUS_MICRO;default: /* 用户空间写的加速度计分辨率数据要乘以1000000000 */return IIO_VAL_INT_PLUS_NANO;}default:return IIO_VAL_INT_PLUS_MICRO;}return -EINVAL;
}/** iio_info结构体变量*/
static const struct iio_info icm20608_info = {.read_raw = icm20608_read_raw,.write_raw = icm20608_write_raw,.write_raw_get_fmt = &icm20608_write_raw_get_fmt, /* 用户空间写数据格式 */
};/** @description : spi驱动的probe函数,当驱动与* 设备匹配以后此函数就会执行* @param - spi : spi设备* @return : 0,成功;其他值,失败*/
static int icm20608_probe(struct spi_device *spi)
{int ret;struct icm20608_dev *dev;struct iio_dev *indio_dev;/* 1、申请iio_dev内存 */indio_dev = devm_iio_device_alloc(&spi->dev, sizeof(*dev));if (!indio_dev)return -ENOMEM;/* 2、获取icm20608_dev结构体地址 */dev = iio_priv(indio_dev); dev->spi = spi;spi_set_drvdata(spi, indio_dev); /* 将indio_de设置为spi->dev的driver_data */mutex_init(&dev->lock);/* 3、iio_dev的其他成员变量 */indio_dev->dev.parent = &spi->dev;indio_dev->info = &icm20608_info;indio_dev->name = ICM20608_NAME; indio_dev->modes = INDIO_DIRECT_MODE; /* 直接模式,提供sysfs接口 */indio_dev->channels = icm20608_channels;indio_dev->num_channels = ARRAY_SIZE(icm20608_channels);/* 4、注册iio_dev */ret = iio_device_register(indio_dev);if (ret < 0) {dev_err(&spi->dev, "iio_device_register failed\n");goto err_iio_register;}/* 5、初始化regmap_config设置 */dev->regmap_config.reg_bits = 8; /* 寄存器长度8bit */dev->regmap_config.val_bits = 8; /* 值长度8bit */dev->regmap_config.read_flag_mask = 0x80; /* 读掩码设置为0X80,ICM20608使用SPI接口读的时候寄存器最高位应该为1 *//* 6、初始化SPI接口的regmap */dev->regmap = regmap_init_spi(spi, &dev->regmap_config);if (IS_ERR(dev->regmap)) {ret = PTR_ERR(dev->regmap);goto err_regmap_init;}/* 7、初始化spi_device */spi->mode = SPI_MODE_0; /*MODE0,CPOL=0,CPHA=0*/spi_setup(spi);/* 初始化ICM20608内部寄存器 */icm20608_reginit(dev); return 0;err_regmap_init:iio_device_unregister(indio_dev);
err_iio_register:return ret;
}/** @description : spi驱动的remove函数,移除spi驱动的时候此函数会执行* @param - spi : spi设备* @return : 0,成功;其他负值,失败*/
static int icm20608_remove(struct spi_device *spi)
{struct iio_dev *indio_dev = spi_get_drvdata(spi);struct icm20608_dev *dev;dev = iio_priv(indio_dev);/* 1、删除regmap */ regmap_exit(dev->regmap);/* 2、注销IIO */iio_device_unregister(indio_dev);return 0;
}/* 传统匹配方式ID列表 */
static const struct spi_device_id icm20608_id[] = {{"alientek,icm20608", 0},{}
};/* 设备树匹配列表 */
static const struct of_device_id icm20608_of_match[] = {{ .compatible = "alientek,icm20608" },{ /* Sentinel */ }
};/* SPI驱动结构体 */
static struct spi_driver icm20608_driver = {.probe = icm20608_probe,.remove = icm20608_remove,.driver = {.owner = THIS_MODULE,.name = "icm20608",.of_match_table = icm20608_of_match,},.id_table = icm20608_id,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init icm20608_init(void)
{return spi_register_driver(&icm20608_driver);
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit icm20608_exit(void)
{spi_unregister_driver(&icm20608_driver);
}module_init(icm20608_init);
module_exit(icm20608_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");
测试
IIO 驱动框架提供了 sysfs 接口,因此加载成功以后我们可以在用户空间访问对应的 sysfs目录项,进入目录“/sys/bus/iio/devices/”目录里面,此目录下都是 IIO 框架设备,如图所示:
从图可以看出,此时有两个 IIO 设备“iio:device0”, iio:device0 是 I.MX6ULL 内部 ADC, iio:device1 才是 ICM20608。大家进入到对应的设备目录就可以看出对应的 IIO 设备,我们进入图中的“iio:device1”目录,此目录下的内容如图所示:
从图可以看出, iio:device1 对应 spi2.0 上的设备,也就是 ICM20608,此目录下有很多文件,比如 in_accel_scale、 in_accel_x_calibias、 in_accel_x_raw 等,这些就是我们设置的通道。 in_accel_scale 就是加速度计的比例,也就是分辨率(量程), in_accel_x_calibias 就是加速度计 X 轴的校准值, in_accel_x_raw 就是加速度计的 X 轴原始值。我们在配置通道的时候,设置
了类型相同的所有通道共用 SCALE,所以这里只有一个 in_accel_scale,而 X、 Y、 Z 轴的原始值和校准值每个轴都有一个文件,陀螺仪和温度计同理。
我们来看一下图中这些文件名字组成方式,以 in_accel_x_raw 为例,这是加速度计的 X 轴原始值,驱动代码中此通道的配置内容展开以后如下(演示代码):
1 .type = IIO_ANGL_VEL,
2 .modified = 1,
3 .channel2 = IIO_MOD_X,
4 .info_mask_shared_by_type = BIT(IIO_CHAN_INFO_SCALE),
5 .info_mask_separate = BIT(IIO_CHAN_INFO_RAW) |
6 BIT(IIO_CHAN_INFO_CALIBBIAS),
7 .scan_index = INV_ICM20608_SCAN_GYRO_X,
8 .scan_type = {
9 .sign = 's',
10 .realbits = 16,
11 .storagebits = 16,
12 .shift = 0,
13 .endianness = IIO_BE,
14 },第 5 行设置了此通道有 IIO_CHAN_INFO_RAW 和 IIO_CHAN_INFO_CALIBBIAS 这两个专属属性,因此才会有图中的 in_accel_x_raw 和 in_accel_x_calibias 这两个文件。
通 道 属 性 的 命 名 , 也 就 是 图中 文 件 的 命 名 模 式 为 :
[direction]_[type]_[index]_[modifier]_[info_mask],我们依次来看一下这些命名组织模块:
direction:为属性对应的方向, iio_direction 结构体定义了方向,内容如下:
48 static const char * const iio_direction[] = {
49 [0] = "in",
50 [1] = "out",
51 };可以看出,就有两个方向: in 和 out。
type: 也就是配置通道的时候 type 值, type 对应的字符可以参考 iio_chan_type_name_spec,如下:
53 static const char * const iio_chan_type_name_spec[] = {
54 [IIO_VOLTAGE] = "voltage",
55 [IIO_CURRENT] = "current",
56 [IIO_POWER] = "power",
57 [IIO_ACCEL] = "accel",
58 [IIO_ANGL_VEL] = "anglvel",
59 [IIO_MAGN] = "magn",
......
85 [IIO_GRAVITY] = "gravity",
86 [IIO_POSITIONRELATIVE] = "positionrelative",
87 [IIO_PHASE] = "phase",
88 [IIO_MASSCONCENTRATION] = "massconcentration",
89 };所以,当通道的 type 设置为 IIO_ACCEL 的时候,对应的名字就是“accel”。
index:索引,如果配置通道的时候设置了 indexed=1,那么就会使用通道的 channel 成员变量来替代此部分命名。比如,有个 ADC 芯片支持 8 个通道,那么就可以使用 channel 来表示对
应的通道,最终在用户空间呈现的每个通道文件名的 index 部分就是通道号。
modifier:当通道的 modified 成员变量为 1 的时候, channel2 就是修饰符,修饰符对应的字符串参考结构体 iio_modifier_names,内容如下:
91 static const char * const iio_modifier_names[] = {
92 [IIO_MOD_X] = "x",
93 [IIO_MOD_Y] = "y",
94 [IIO_MOD_Z] = "z",
......
131 [IIO_MOD_PM4] = "pm4",
132 [IIO_MOD_PM10] = "pm10",
133 };当通道的修饰符设置为 IIO_MOD_X 的时候,对应的名字就是“x”。
info_mask: 属性掩码,也就是属性,不同属性对应的字符如下所示:
136 static const char * const iio_chan_info_postfix[] = {
137 [IIO_CHAN_INFO_RAW] = "raw",
138 [IIO_CHAN_INFO_PROCESSED] = "input",
139 [IIO_CHAN_INFO_SCALE] = "scale",
140 [IIO_CHAN_INFO_OFFSET] = "offset",
141 [IIO_CHAN_INFO_CALIBSCALE] = "calibscale",
142 [IIO_CHAN_INFO_CALIBBIAS] = "calibbias",
......
161 [IIO_CHAN_INFO_DEBOUNCE_TIME] = "debounce_time",
162 [IIO_CHAN_INFO_CALIBEMISSIVITY] = "calibemissivity",
163 [IIO_CHAN_INFO_OVERSAMPLING_RATIO] = "oversampling_ratio",
164 };可以看出, IIO_CHAN_INFO_RAW 属性对应的就是“raw”, IIO_CHAN_INFO_SCALE 属性对应的是“scale”。
综上所述, in_accel_x_raw 组成形式如图所示: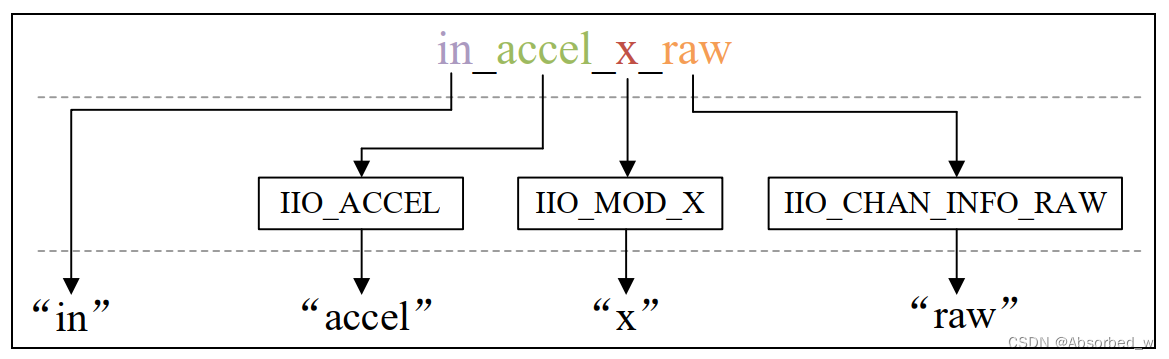
读文件测试
我们读取一下 in_accel_z_raw 这个文件,这个文件是加速度计的 Z 轴原始值,静态情况下 Z 轴应该是 1g 的重力加速度计,我们可以读取 in_accel_z_raw 这个文件的值,然后在结合上面读取到的加速度计分辨率,计算一下对应的 Z 轴重力值,看看是不是 1g 左右。
2074× 0.000488281≈1.01g,此时 Z 轴重力为 1g,结果正确。
相关文章:
I.MX6ULL_Linux_驱动篇(58)linux IIO驱动
工业场合里面也有大量的模拟量和数字量之间的转换,也就是我们常说的 ADC 和 DAC。而且随着手机、物联网、工业物联网和可穿戴设备的爆发,传感器的需求只持续增强。比如手机或者手环里面的加速度计、光传感器、陀螺仪、气压计、磁力计等,这些传…...

两个包装类型变量的比较问题
问题: 由于受包装类的自动装箱和拆箱的影响,一直以为直接用直接比较两个包装类的大小是否相等就可以,惭愧。比如: Integer a11; Integer b11; System.out.println(ab); 运行结果是 true,似乎没啥问题,但…...

Qt/C++通用跨平台Onvif工具/支持海康大华宇视华为天地伟业等/云台控制/预置位管理/工程调试利器
一、前言 在安防视频监控行业,Onvif作为国际标准,几乎主要的厂商都支持,不仅包含了国内的厂商,也包括主要的国际厂商,由于有了这个标准的存在,使得不同设备不同安防平台之间,能够接入各个厂家的…...

js 在for循环中有setTimeout 时,不执行等待,解决方法
原因:由于setTimeout是异步的,for循环是同步的,所以你的循环会立即继续到下一个迭代,而不会等待setTimeout完成。这意味着所有setTimeout调用几乎会同时开始等待2秒,而不是一个接一个地等待,因此程序出错。…...

机械硬盘与固态硬盘的区别
硬盘中包含机械硬盘、固态硬盘和混合硬盘,那机械硬盘与固态硬盘之间有什么区别呢? 机械硬盘就是传统的普通硬盘,主要采取的存储方式是机械式存储,通过磁头在盘片上进行读写数据;固态硬盘采取的方式则是电子存储&#x…...
Springboot总结
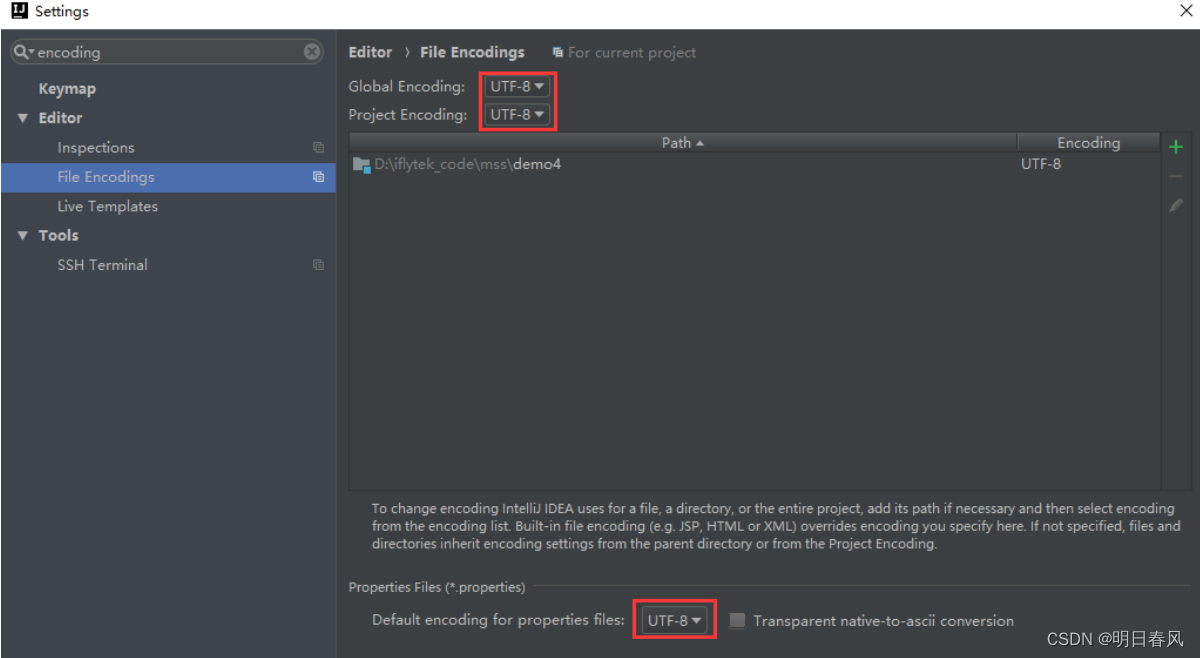
新建项目后,我们一般都需要配置编码,这点非常重要,很多初学者都会忘记这一步,所以要养成良好的习惯。 IDEA 中,仍然是打开File->settings,搜索 encoding,配置一下本地的编码信息。如下&…...
P8623 [蓝桥杯 2015 省 B] 移动距离 Python
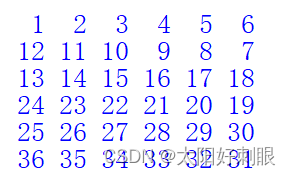
[蓝桥杯 2015 省 B] 移动距离 题目描述 X 星球居民小区的楼房全是一样的,并且按矩阵样式排列。其楼房的编号为 $1,2,3, \cdots $ 。 当排满一行时,从下一行相邻的楼往反方向排号。 比如:当小区排号宽度为 6 6 6 时,开始情形如…...
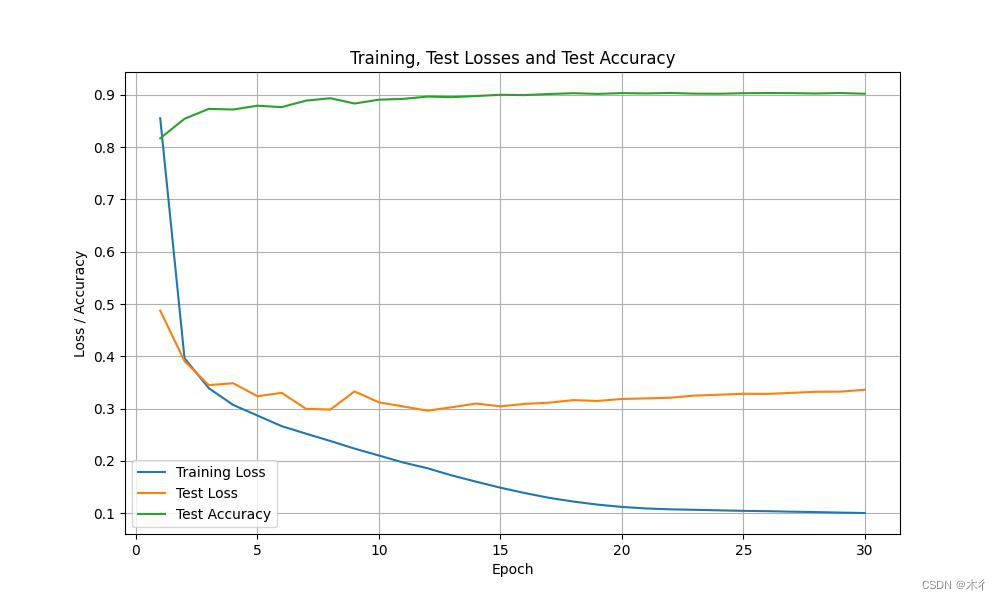
【Python】学习率调整策略详解和示例
学习率调整得当将有助于算法快速收敛和获取全局最优,以获得更好的性能。本文对学习率调度器进行示例介绍。 学习率调整的意义基础示例无学习率调整方法学习率调整方法一多因子调度器余弦调度器 结论 学习率调整的意义 首先,学习率的大小很重要。如果它…...

【Linux实践室】Linux用户管理实战指南:用户密码管理操作详解
🌈个人主页:聆风吟_ 🔥系列专栏:Linux实践室、网络奇遇记 🔖少年有梦不应止于心动,更要付诸行动。 文章目录 一. ⛳️任务描述二. ⛳️相关知识2.1 🔔用户密码存放地及方式2.2 🔔使用…...
UE5学习日记——蓝图节点前缀关键字整理
一、起因 节点如海,中英文翻译的时候还是有差别的,比如: 同一个中文,可能在英文里完全不同,连出现位置可能都不一样 附加 Attach Actor To Component(将Actor附加到组件)Append Array…...

浅析机器学习的常用方法
引言: 机器学习(Machine Learning,ML)是一种以计算机程序为基础,在不需要明确编程的情况下,对数据进行分析和处理的人工智能技术。与传统的计算机编程相比,机器学习的区别在于它通过数据建立模…...

大数据开发(日志离线分析项目)
大数据开发(日志离线分析项目) 一、项目需求1、使用jqueryecharts的方式调用程序后台提供的rest api接口,获取json数据,然后通过jquerycss的方式进行数据展示。工作流程如下:2、七大角度1、用户基本信息分析模块2、浏览…...
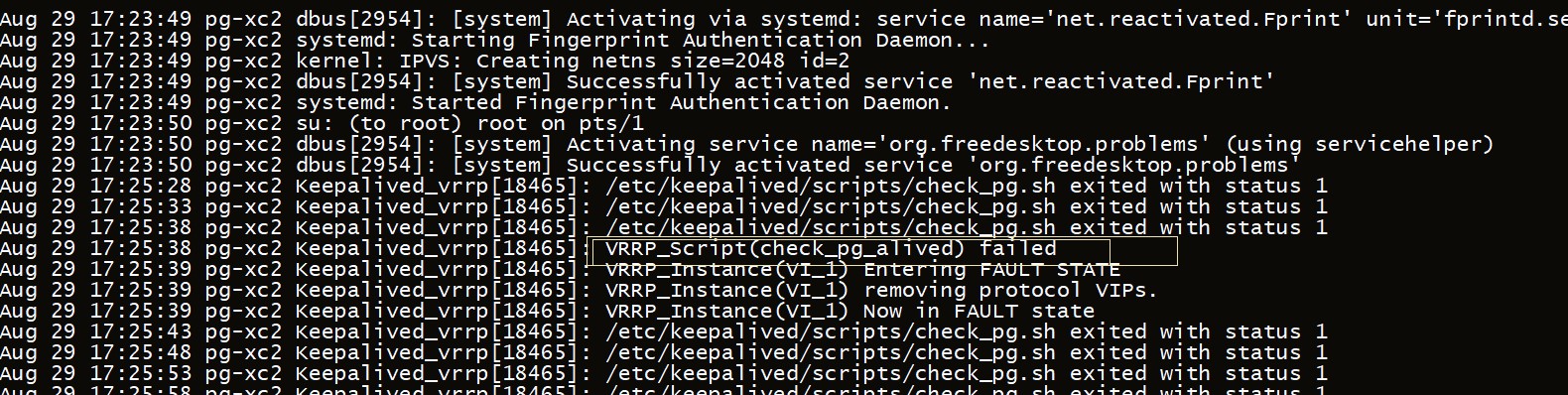
PostgreSQL技术大讲堂 - 第48讲:PG高可用实现keepalived
PostgreSQL从小白到专家,是从入门逐渐能力提升的一个系列教程,内容包括对PG基础的认知、包括安装使用、包括角色权限、包括维护管理、、等内容,希望对热爱PG、学习PG的同学们有帮助,欢迎持续关注CUUG PG技术大讲堂。 第48讲&#…...
【若依 SpringBoot 前后端分离版】修改加密传输后密码错误的解决方法(附排错过程)
目录 排错过程 报错信息 SysLoginController SysLoginService(问题核心) 太长不看版:解决方法 文章传送门:若依(RuoYi)SpringBoot框架密码加密传输(前后分离板)_若依密码加密方式-CSDN博客文章浏览阅读1.5w次,点赞…...
发送请求- header配置
请求头里是客户端的要求,把你的诉求告诉服务端,服务端按照你的要求返回数据 , 请求header需要严格全配置,把请求header全部传入,不能频繁访问,让后端知道它是正常请求 一般只配置User-Agent和Content Typ…...

C语言重难知识点
C语言重难知识点 if(a=1) 为真函数指针的调用(int)2.9 = 2逗号运算符,最右边表达式值作为整个逗号表达式的值。文件操作if(a=1) 为真 int a=0,b=0,c=0; if(a...

jMeter学习
一. JMeter介绍 1. 什么是JMeter? Apache JMeter™ 应用程序是开源软件,一个 100% 纯 Java 应用程序,旨在加载测试功能行为和测量性能 。它最初是为测试 Web 应用程序而设计的,但后来扩展到其他测试功能。 2. JMeter能做啥&#x…...

Nodejs运行vue项目时,报错:Error: error:0308010C:digital envelope routines::unsupported
前端项目使用( npm run dev ) 运行vue项目时,出现错误:Error: error:0308010C:digital envelope routines::unsupported 经过探索,发现问题所在,主要是nodeJs V17版本发布了OpenSSL3.0对算法和秘钥大小增加了更为严格的限制&#…...

华为汽车图谱
极狐 极狐(ARCFOX)是由北汽、华为、戴姆勒、麦格纳等联合打造。总部位于北京蓝谷。 问界 华为与赛力斯(东风小康)合作的成果。 阿维塔 阿维塔(AVATR)是由长安汽车、华为、宁德时代三方联合打造。公司总部位…...
鸿蒙操作系统-初识
HarmonyOS-初识 简述安装配置hello world1.创建项目2.目录解释3.构建页面4.真机运行 应用程序包共享包HARHSP 快速修复包 官方文档请参考:HarmonyOS 简述 1.定义:HarmonyOS是分布式操作系统,它旨在为不同类型的智能设备提供统一的操作系统&a…...

AI执行层临界点:推理确定性、能力切片与可信Agent的工程落地
1. 项目概述:这不是一份新闻简报,而是一份AI产业周度“技术脉搏图”“Last Week in AI”这个标题乍看像一份科技媒体的常规栏目,但真正拆开来看——它根本不是给普通读者看的“资讯摘要”,而是一份面向AI工程师、算法研究员、技术…...

调查研究-142 全球机器人产业深度调研报告【04篇】机器人产业利润池全景:谁最容易赚钱与十大判断指标
TL;DR 场景:关注机器人产业投资、创业、就业方向的投资者、从业者、分析师结论:医疗机器人耗材/服务>高端核心零部件>系统集成>物流RaaS>工业本体>软件AI平台;人形机器人长期空间大但短期商业化仍早产出:三档利润池…...

Cortex-R52多集群中断处理机制与优化实践
1. Cortex-R52多集群中断处理机制解析在嵌入式实时系统中,Cortex-R52处理器因其确定性中断响应能力而广受青睐。当设计采用多集群架构时,中断处理机制面临独特挑战——每个集群内置的GIC模块如何协同工作?这直接关系到系统实时性能的边界。关…...

三亚高端小区实景落地选哪家
在三亚,高端小区对居住品质的要求近乎苛刻——不仅要有气派的视觉呈现,更要经得起台风、高湿、海风盐雾的考验。如果您正在寻找一家能真正实现“所见即所得”的实景落地服务商,三亚秦鼎科技有限公司就是您不容错过的选择。为什么是秦鼎科技&a…...

实测taotoken在不同时段api调用的响应延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测taotoken在不同时段api调用的响应延迟与稳定性表现 对于依赖大模型API进行开发的团队而言,服务的响应延迟与稳定性…...

【Sora 2批量视频生成黄金工作流】:实测吞吐提升4.8倍的关键配置——NVIDIA A100集群下每小时稳定输出217段1080p视频
更多请点击: https://codechina.net 第一章:Sora 2批量视频生成工作流全景概览 Sora 2作为新一代多模态视频生成模型,其批量处理能力依托于模块化、可编排的端到端工作流设计。该工作流融合提示工程、时空 latent 编码、分块并行解码与后处理…...

Apache Flink 快速入门
Flink开发环境准备学习一门新的编程语言时,往往会从"hello world"程序开始,而接触一套新的大数据计算框架时,则一般会从WordCount案例入手,下面以大数据中最经典入门案例WordCount为例,来编写Flink代码&…...

PddConsumptionModel.java
package pdd;import java.util.ArrayList; import java.util.List; import java.util.Random;/*** 某多多的商业模式,砍价格算法模拟下哈* * * author ZengWenFeng* email 117791303QQ.com* mobile 13805029595* date 2023.11.17*/ public class PddConsumptionMode…...

SoC性能深度解析:从CPU/GPU到互连与内存子系统的系统性认知
1. 项目概述:从“黑盒”到“白盒”的SoC认知跃迁在芯片设计领域,尤其是面向移动设备、物联网终端和各类嵌入式系统,SoC(System on Chip,片上系统)早已成为绝对的核心。我们常常会听到这样的讨论:…...

3分钟搞定B站缓存:这款神器让视频转换超简单
3分钟搞定B站缓存:这款神器让视频转换超简单 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾为B站视频下架而焦虑࿱…...