【PSINS工具箱】EKF与UKF滤波
描述
对工具箱SINS/GPS,153例程的修改,将EKF和UKF放在一个文件里面,一次运行可以得到两个滤波的结果。
片段
运行截图


程序完整源代码
在有工具箱的情况下,直接运行此代码,即可得到结果
% 基于PSINS工具箱的IMU数据生成与滤波
% date:2024-2-15
% Evand(evandworld@qq.com)
% Ver1
clear;clc;close all;
glvs
psinstypedef(153);
ts = 0.1; % sampling interval
%% 轨迹设置
avp0 = [[0;0;0]; [0;0;0]; [0;0;0]]; % init avp
% trajectory segment setting
traj_ = [];
seg = trjsegment(traj_, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, traj_, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'climb', 10, 2, traj_, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'descent', 10, 2, traj_, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, traj_, 2); %2
seg = trjsegment(seg, 'uniform', 100);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);
% trjfile('trj10ms.mat', trj);
%% 初始化
% initial settings
[nn, ts, nts] = nnts(2, trj.ts);
imuerr = imuerrset(0.03, 100, 0.001, 5);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);
% KF filter
rk = poserrset([1;1;3]);
kf = kfinit(ins, davp0, imuerr, rk);
kf.Pmin = [avperrset(0.01,1e-4,0.1); gabias(1e-3, [1,10])].^2; kf.pconstrain=1;
len = length(imu); [avp_ekf, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1);
timebar(nn, len, 'KF');
ki = 1;
for k=1:nn:len-nn+1k1 = k+nn-1; wvm = imu(k:k1,1:6); t = imu(k1,end);ins = insupdate(ins, wvm);kf.Phikk_1 = kffk(ins);kf = kfupdate(kf);if mod(t,1)==0posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noisekf = kfupdate(kf, ins.pos-posGPS, 'M');[kf, ins] = kffeedback(kf, ins, 1, 'avp');avp_ekf(ki,:) = [ins.avp', t];xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1;endtimebar;
end
avp_ekf(ki:end,:) = []; xkpk(ki:end,:) = [];
%% EKF show results
insplot(avp_ekf);
avperr = avpcmpplot(trj.avp, avp_ekf);
kfplot(xkpk, avperr, imuerr);%% UKF filter
glvs
% psinstypedef('test_SINS_GPS_UKF_153_def');
[nn, ts, nts] = nnts(2, trj.ts);
imuerr = imuerrset(0.03, 100, 0.001, 5);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);rk = poserrset([1;1;3]);
kf = kfinit(ins, davp0, imuerr, rk);
kf.fx = @largephiu15ukf;
len = length(imu); [avp_ukf, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1);
timebar(nn, len, '15-state SINS/GPS UKF仿真,时间较长');
ki = 1;
for k=1:nn:len-nn+1k1 = k+nn-1; wvm = imu(k:k1,1:6); t = imu(k1,end);ins = insupdate(ins, wvm);kf.px = ins;kf = ukf(kf);if mod(t,1)==0posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noisekf = ukf(kf, ins.pos-posGPS, 'M'); % UKF filter[kf, ins] = kffeedback(kf, ins, 1, 'avp');avp_ukf(ki,:) = [ins.avp', t];xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1;endtimebar;
end
avp_ukf(ki:end,:) = []; xkpk(ki:end,:) = []; %% results
insplot(trj.avp);
imuplot(trj.imu);
figure;
plot3(trj.avp(:,7),trj.avp(:,8),trj.avp(:,9));
hold on
plot3(trj.avp(1,7),trj.avp(1,8),trj.avp(1,9),'*');
plot3(avp_ekf(:,7),avp_ekf(:,8),avp_ekf(:,9));
plot3(avp_ukf(:,7),avp_ukf(:,8),avp_ukf(:,9));
title('原创——3D轨迹图');
legend('真实值','起点','EKF滤波值','UKF滤波值');
% 误差绘图
% 误差曲线图与累积分布函数图,两种情况、三轴
figure;
subplot(3,2,1);
plot(1:10:len,avp_ekf(:,7)-trj.avp(1:10:len,7),1:10:len,avp_ukf(:,7)-trj.avp(1:10:len,7));
title('原创——X轴位置误差对比');legend('EKF滤波值','UKF滤波值');
subplot(3,2,3);
plot(1:10:len,avp_ekf(:,8)-trj.avp(1:10:len,8),1:10:len,avp_ukf(:,8)-trj.avp(1:10:len,8));
subplot(3,2,5);
plot(1:10:len,avp_ekf(:,9)-trj.avp(1:10:len,9),1:10:len,avp_ukf(:,9)-trj.avp(1:10:len,9));
subplot(3,2,2);
cdfplot(abs(avp_ekf(:,7)-trj.avp(1:10:len,7)));
hold on
cdfplot(abs(avp_ukf(:,7)-trj.avp(1:10:len,7)));
subplot(3,2,4);
cdfplot(abs(avp_ekf(:,8)-trj.avp(1:10:len,8)));
hold on
cdfplot(abs(avp_ukf(:,8)-trj.avp(1:10:len,8)));
subplot(3,2,6);
cdfplot(abs(avp_ekf(:,9)-trj.avp(1:10:len,9)));
hold on
cdfplot(abs(avp_ukf(:,9)-trj.avp(1:10:len,9)));
%% 误差输出
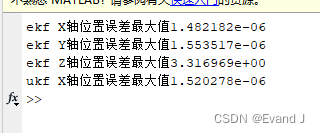
fprintf('ekf X轴位置误差最大值%d\n',max(abs(avp_ekf(:,7)-trj.avp(1:10:len,7))));
fprintf('ekf Y轴位置误差最大值%d\n',max(abs(avp_ekf(:,8)-trj.avp(1:10:len,8))));
fprintf('ekf Z轴位置误差最大值%d\n',max(abs(avp_ekf(:,9)-trj.avp(1:10:len,9))));
fprintf('ukf X轴位置误差最大值%d\n',max(abs(avp_ukf(:,7)-trj.avp(1:10:len,7))));相关文章:
【PSINS工具箱】EKF与UKF滤波
描述 对工具箱SINS/GPS,153例程的修改,将EKF和UKF放在一个文件里面,一次运行可以得到两个滤波的结果。 片段 运行截图 程序完整源代码 在有工具箱的情况下,直接运行此代码,即可得到结果 % 基于PSINS工具箱的IMU数据…...

UOS部署oceanbase
安装docker环境。 镜像可在本文档中下载4.2版本的oceanbase 加载镜像 docker load -i oceanbase_4212_x86_64_20231214.tar.gz注意事项 确保挂载点大于200GLOCAL_IP 部署服务器ipNIC_NAME 部署服务器对应的网络OBCLUSTER_IP_LIST 部署服务器ip 启动容器 sudo docker run …...

Hive查询转换与Hadoop生态系统引擎与优势
目录 摘要一、Hive是什么二、HDFS是什么三、Hive与HDFS的关系四、什么是HiveQL五、什么是mapreduce六、Hive如何将查询转为mapreduce任务七、Hadoop生态系统中的高性能引擎八、使用Hadoop的优点 摘要 Hadoop生态系统中包含了多个关键组件,如Hive、HDFS、MapReduce等…...
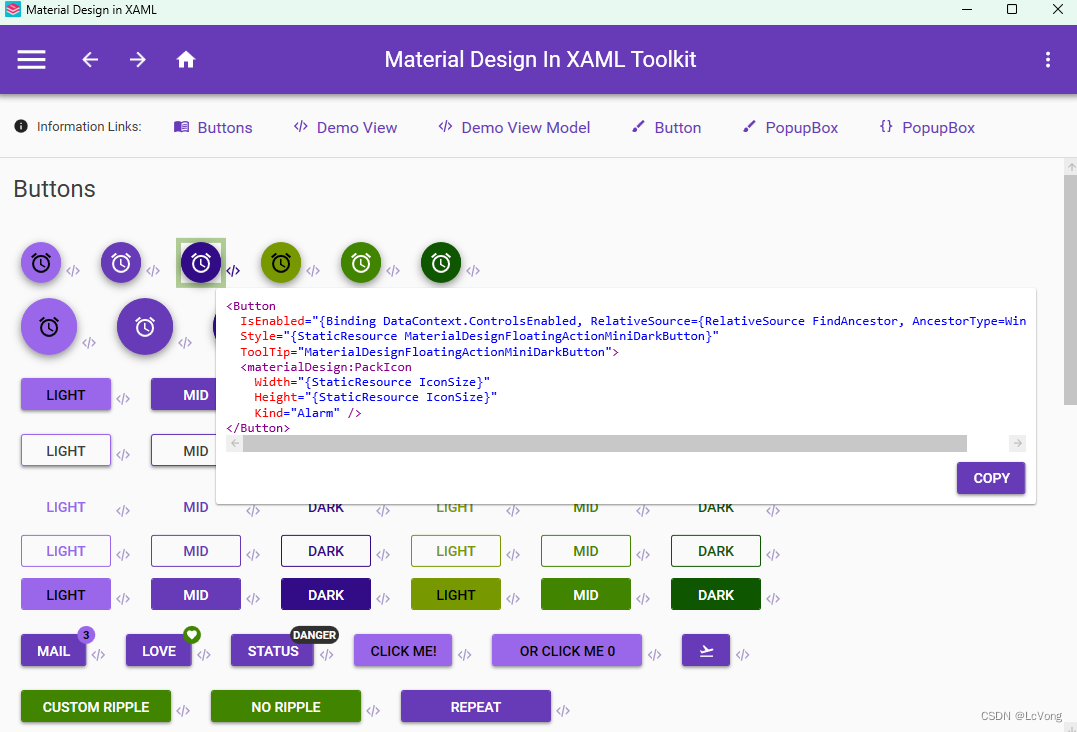
WPF上使用MaterialDesign框架---下载与配置
一、介绍: Material Design语言的一些重要功能包括 系统字体Roboto的升级版本 ,同时颜色更鲜艳,动画效果更突出。杜拉特还简要谈到了新框架的一些变化。谷歌的想法是让谷歌平台上的开发者掌握这个新框架,从而让所有应用就有统一的…...

鸿蒙ARKTS--简易的购物网站
目录 一、media 二、string.json文件 三、pages 3.1 登录页面:gouwuPage.ets 3.2 PageResource.ets 3.3 商品页面:shangpinPage.ets 3.4 我的页面:wodePage.ets 3.5 注册页面:zhucePage.ets 3. 购物网站主页面ÿ…...

LabVIEW转动设备故障诊断系统
LabVIEW转动设备故障诊断系统 随着工业自动化技术的不断进步,转动设备在电力、化工、船舶等多个行业中扮演着越来越重要的角色。然而,这些设备在长期运行过程中难免会出现故障,如果不能及时诊断和处理,将会导致生产效率下降&…...
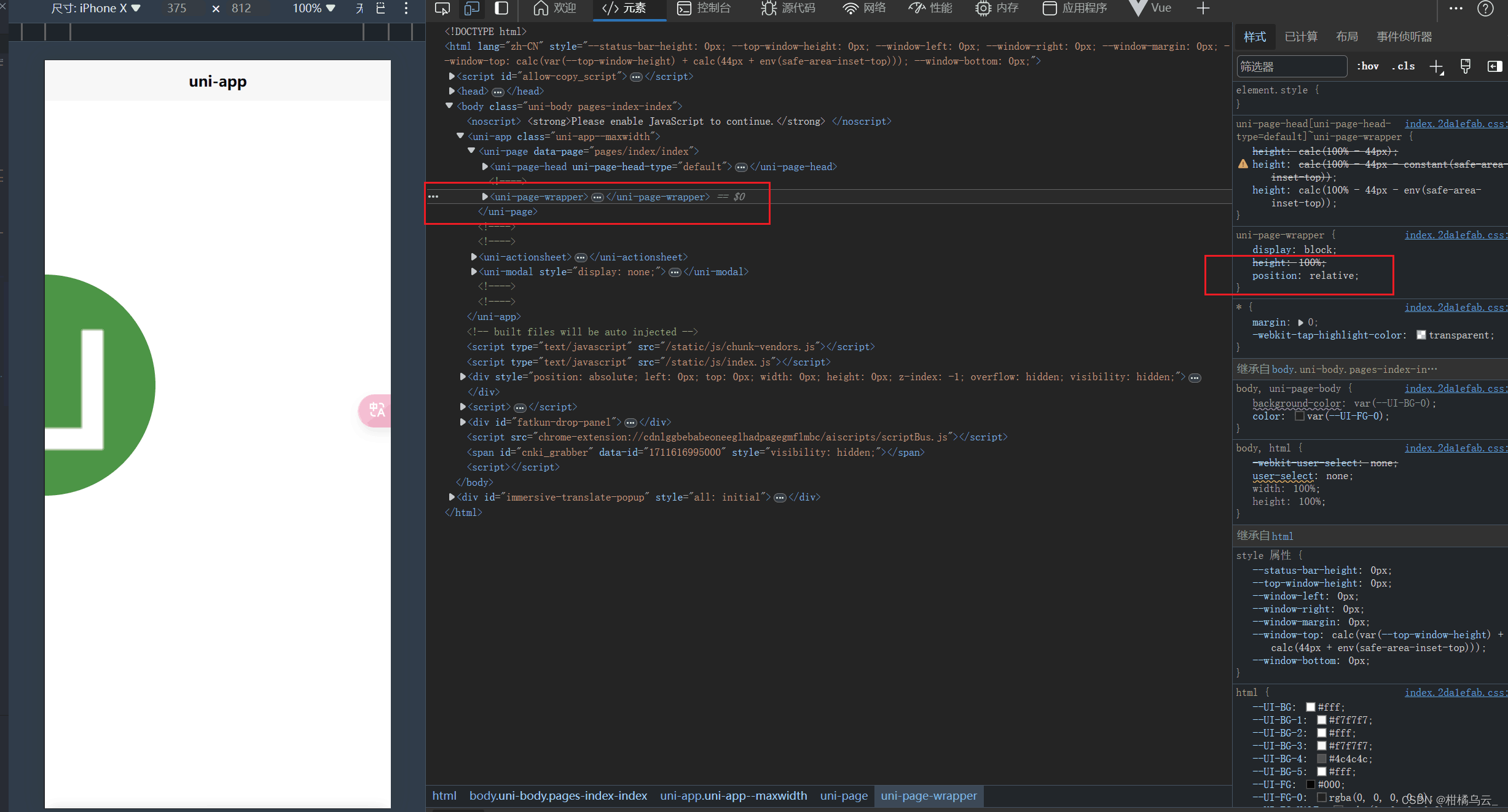
uniapp h5 touch事件踩坑记录
场景:悬浮球功能 当我给悬浮球设置了 position: fixed; 然后监听悬浮球的touch事件,从事件对象中拿到clientY和clientX赋值给悬浮球的left和top属性。当直接赋值后效果应该是这样子: 注意鼠标相对悬浮球的位置,应该就是左上角&a…...
)
webpack.prod.js(webpack生产环境配置文件)
生产环境:只打包不运行本地服务器 对于在config目录下的webpack.prod.js 1.在根目录下运行 npx webpack --config ./config/webpack.prod.js 2.在package.json文件中配置 "build":"npx webpack --config ./config/webpack.prod.js" const …...
,连接数据库和服务器接口,涉及雪花id服务)
利用python做模拟数据(测试数据),连接数据库和服务器接口,涉及雪花id服务
import datetime import jsonimport pymysql import requests import snowflake.client from faker import Faker#cmd启动snowflake服务: #snowflake_start_server --addresslocalhost --port8910 --dc1 --worker1 def create_testers():# 创建一个中文Faker实例fak…...

大模型日报2024-03-30
大模型资讯 提升大型语言模型推理速度:高效部署技术 摘要: 随着GPT-4、LLaMA和PaLM等大型语言模型(LLMs)不断拓展自然语言处理的边界,研究人员正在探索加速这些模型推理过程的技术。这些技术旨在提高模型部署的效率,以…...

【ARM 嵌入式 C 入门及渐进 14 -- C 代码中取余与取模的使用介绍】
请阅读【嵌入式开发学习必备专栏 】 文章目录 背景示例 背景 有些文件每行是固定的字符个数,那么如果任意给个字符的序号,怎么通过C 代码获取该字符所在的行呢? 处理这个问题就要用到 C 语言中的取余和取模运算了。 示例 在 C 语言中&…...
C++入门知识详细讲解
C入门知识详细讲解 1. C简介1.1 什么是C1.2 C的发展史1.3. C的重要性1.3.1 语言的使用广泛度1.3.2 在工作领域 2. C基本语法知识2.1. C关键字(C98)2.2. 命名空间2.2 命名空间使用2.2 命名空间使用 2.3. C输入&输出2.4. 缺省参数2.4.1 缺省参数概念2.4.2 缺省参数分类 2.5. …...
:以vggish为例)
pytorch中的torch.hub.load():以vggish为例
pytorch提供了torch.hub.load()函数加载模型,该方法可以从网上直接下载模型或是从本地加载模型。官方文档 torch.hub.load(repo_or_dir, model, *args, sourcegithub, trust_repoNone, force_reloadFalse, verboseTrue, skip_validationFalse, **kwargs)参数说明&a…...
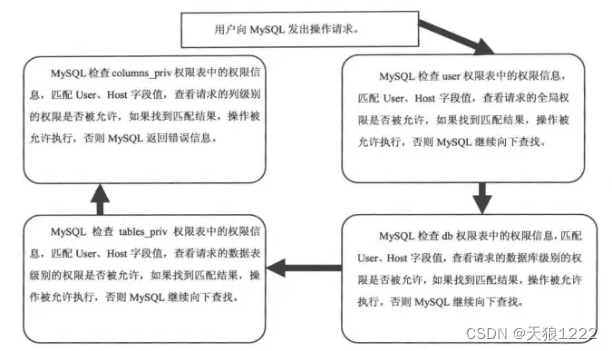
mysql 用户管理-权限管理
学习了用户管理,再学习下权限管理。 3,权限管理 权限管理主要是对登录到MySQL的用户进行权限验证。所有用户的权限都存储在MySQL的权限表中,不合理的权限规划会给MySQL服务器带来安全隐患。数据库管理员要对所有用户的权限进行合理规…...
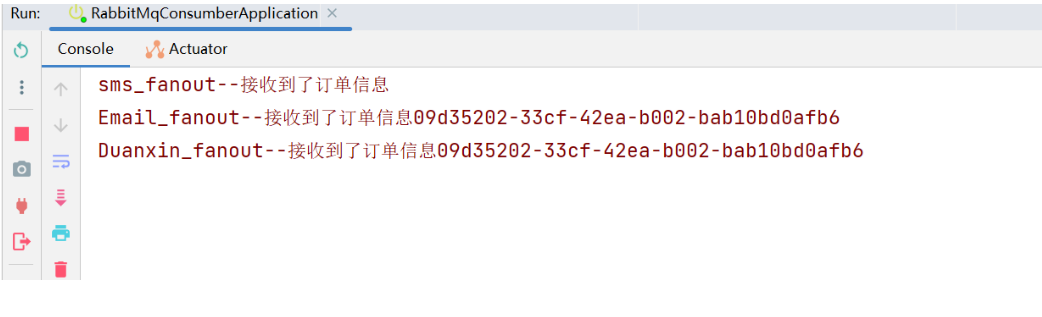
RabbitMQ--04--发布订阅模式 (fanout)-案例
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 发布订阅模式 (fanout)---案例前言RabbitListener和RabbitHandler的使用 1.通过Spring官网快速创建一个RabbitMQ的生产者项目2.导入项目后在application.yml文件中配…...

基于java+SpringBoot+Vue的网上书城管理系统设计与实现
基于javaSpringBootVue的网上书城管理系统设计与实现 开发语言: Java 数据库: MySQL技术: SpringBoot MyBatis工具: IDEA/Eclipse、Navicat、Maven 系统展示 前台展示 后台展示 系统简介 整体功能包含: 网上书城管理系统是一个基于互联网的在线购书平台&#…...
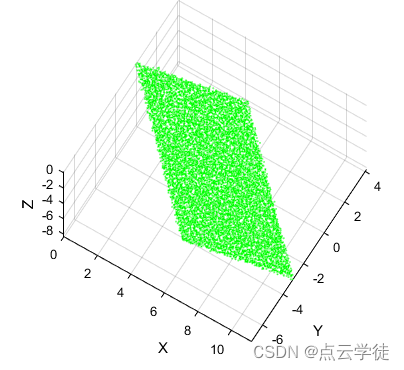
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十六)
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十五六) 一、算法介绍二、使用步骤1.代码2.效果一、算法介绍 写论文当然用RANSAC的优化变种算法MSAC啊,RANSAC太土太LOW了哈哈 MSAC算法(M-estimator Sample Consensus)是RANSAC(Random Sample Consensus)的一种…...
通过WSL在阿里云上部署Vue项目
参考: 阿里云上搭建网站-CSDN博客 云服务器重装 关闭当前运行实例 更换操作系统,还有其他的进入方式。 选择ubuntu系统(和WSL使用相同的系统)。 设置用户和密码。发送短信验证码。 新系统更新。秒速干净的新系统设置完成。 这…...
240330-大模型资源-使用教程-部署方式-部分笔记
A. 大模型资源 Models - Hugging FaceHF-Mirror - Huggingface 镜像站模型库首页 魔搭社区 B. 使用教程 HuggingFace HuggingFace 10分钟快速入门(一),利用Transformers,Pipeline探索AI。_哔哩哔哩_bilibiliHuggingFace快速入…...

uni-app 富文本编辑器
<template><view class"container"><view>标题:<u-input placeholder"请输入标题"></u-input></view><view class"page-body"><view classwrapper><view classtoolbar tap"…...

Go项目安全左移实践:集成Security-Shield实现自动化漏洞与密钥检测
1. 项目概述与核心价值 在当今的软件开发与运维实践中,应用安全已经从“附加题”变成了“必答题”。无论是个人开发者的小型项目,还是企业级的复杂系统,都面临着来自网络的各种潜在威胁。然而,安全工具的引入往往伴随着陡峭的学习…...

ImageGlass:Windows平台最强图像浏览器,90+格式全支持
ImageGlass:Windows平台最强图像浏览器,90格式全支持 【免费下载链接】ImageGlass 🏞 A lightweight, versatile image viewer 项目地址: https://gitcode.com/gh_mirrors/im/ImageGlass 你是否曾因Windows自带照片应用无法打开专业RA…...

ngx_http_create_request
1 定义 ngx_http_create_request 函数 定义在 ./nginx-1.24.0/src/http/ngx_http_request.cngx_http_request_t * ngx_http_create_request(ngx_connection_t *c) {ngx_http_request_t *r;ngx_http_log_ctx_t *ctx;ngx_http_core_loc_conf_t *clcf;r ngx_http_…...

AI技能统一管理:用Obsidian插件Agentfiles构建你的智能编码中枢
1. 项目概述:一个为AI编码时代打造的技能中枢 如果你和我一样,日常开发工作流里已经塞满了各种AI编码助手——Claude Code、Cursor、Codex、Windsurf……那么你一定也面临过同样的困境:每个工具都有自己的一套“技能”或“记忆”系统…...

Sora 2正式版突然开放API灰度权限?我们逆向解析了127行响应头与rate limit策略,发现3个隐藏调用阈值
更多请点击: https://intelliparadigm.com 第一章:Sora 2正式版核心能力与架构演进 Sora 2正式版标志着视频生成大模型从研究原型迈向工业级部署的关键跃迁。其底层架构采用分层时空联合建模(Hierarchical Spatio-Temporal Transformer&…...

ESP32音频播放终极指南:从SD卡播放MP3到网络流媒体的完整解决方案
ESP32音频播放终极指南:从SD卡播放MP3到网络流媒体的完整解决方案 【免费下载链接】ESP32-audioI2S Play mp3 files from SD via I2S 项目地址: https://gitcode.com/gh_mirrors/es/ESP32-audioI2S 想要在ESP32上构建专业的音频播放系统吗?ESP32-…...

【Oracle数据库指南】第06篇:Oracle DML语句与事务控制——数据操作与ACID特性深度解析
上一篇【第05篇】Oracle子查询与集合操作——嵌套查询与结果合并全解析 下一篇【第07篇】SQL*Plus基础——登录、环境设置与缓冲区操作 摘要 本文全面讲解Oracle DML(数据操作语言)语句,包括INSERT、UPDATE、DELETE和MERGE的详细用法&#x…...
核心算法,搞定面试高频考点)
C++数据结构进阶|排序:吃透O(n log n)核心算法,搞定面试高频考点
文章目录 前言 一、希尔排序(Shell Sort)—— 插入排序的进阶优化版 二、快速排序(Quick Sort)—— C面试手写高频,实际开发首选 三、归并排序(Merge Sort)—— 稳定排序的核心选择 四、堆排…...

智能产品系统架构分析 - 智能办公系统架构分层
方向:方案分析、架构设计、模块分解 智能产品系统架构分析:智能办公系统架构分层。 对智能办公系统进行架构分层分析,给出实例、UML建模、项目结构等。 “智能产品系统架构分析:智能办公系统架构分层”。 包含设备控制、预约管…...

BetaClaw:开源AI代理运行时,统一多模型调用与智能成本控制
1. 项目概述:一个为开发者打造的“瑞士军刀”级AI代理运行时如果你和我一样,每天都在和不同的AI模型打交道,那你一定也经历过这种痛苦:想用Claude写点创意文案,得去Anthropic的API;想用GPT-4o分析代码&…...