力控机器人原理及力控制实现
力控机器人原理及力控制实现
力控机器人是一种能够感知力量并具有实时控制能力的机器人系统。它们可以在与人类进行精准协作和合作时,将力传感技术(Force Sensing Technology)和控制算法(Control Algorithm)结合起来,实现高度灵活和精确的操作。
这些机器人通常被用于各种高要求的工作场景中,如精密装配、半导体制造、医疗手术等。通过力控技术,机器人可以感知到施加在物体上的力量,并根据预设的参数值进行自动调整,以避免对物体造成损害。此外,力控机器人还可以在操作过程中根据需要实时改变力量,以适应不同的任务需求。
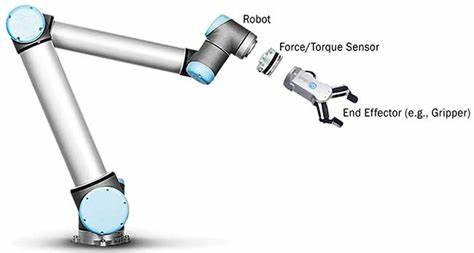
力控机器人的工作原理包括三个主要部分:感知、控制和执行。首先,机器人通过内置的力传感器感知到施加在物体上的力量。接下来,控制算法会根据感知到的力量值和其他相关信息,计算出机器人应该如何调整其操作以达到预设的目标。最后,机器人的执行器会根据计算结果,实时调整机器人的动作和力量,以确保操作的精确性和安全性。

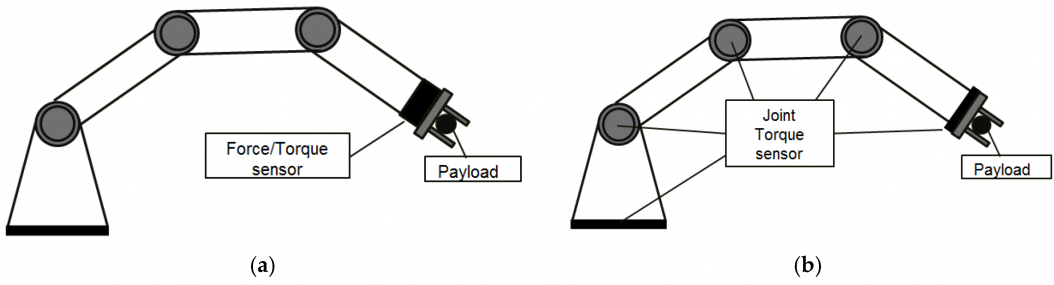
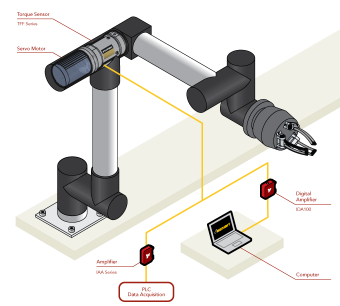
力/力矩传感器在力控方式中扮演着非常重要的角色,因为它们能够提供实时的力反馈,让人形机器人能够精确地控制其操作。
这些传感器通常被放置在机器人和外部环境之间,以便测量机器人施加在外部环境上的力量。这些信息对于实现精确和安全的操作至关重要,因为它们可以帮助机器人根据实际需要实时调整其力量和动作。
通过将力/力矩传感器与机器人的控制系统相结合,可以实现对机器人操作的精确控制。这将使机器人能够更好地适应不同的任务需求,提高其灵活性和适应性。

机器人感知层的确是通过各种感知技术,如力觉、触觉、视觉等,来获取和理解外部环境和状态的信息,从而为人机交互和柔性作业提供决策依据。这些感知方式对于机器人的自主操作和智能化发展都至关重要。
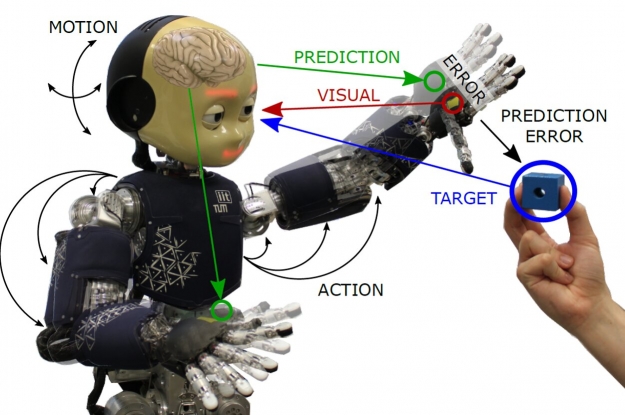
其中,力触觉感知系统在机器人操作中具有非常重要的作用。它可以检测机器人末端执行器与工件相互作用时产生的三维力/力矩和接触信息。这些信息对于机器人来说是极其重要的,它们可以提供关于环境、操作和自身状态的详细信息,帮助机器人做出更精确和安全的操作。
具体来说,力触觉感知系统的工作原理如下:首先,安装在机器人末端执行器上的力/力矩传感器会实时检测到与工件的相互作用力。这些力信号将被转换为电信号,然后通过数据传输到机器人的控制系统。在控制系统内,这些电信号会被进一步处理和分析,以生成有关机器人操作的各种信息。这些信息可以包括工件的形状、大小、硬度等,以及机器人末端执行器的姿态、位置等。这些信息对于机器人来说是极其重要的,它们可以帮助机器人更好地适应环境,做出更精确的操作。
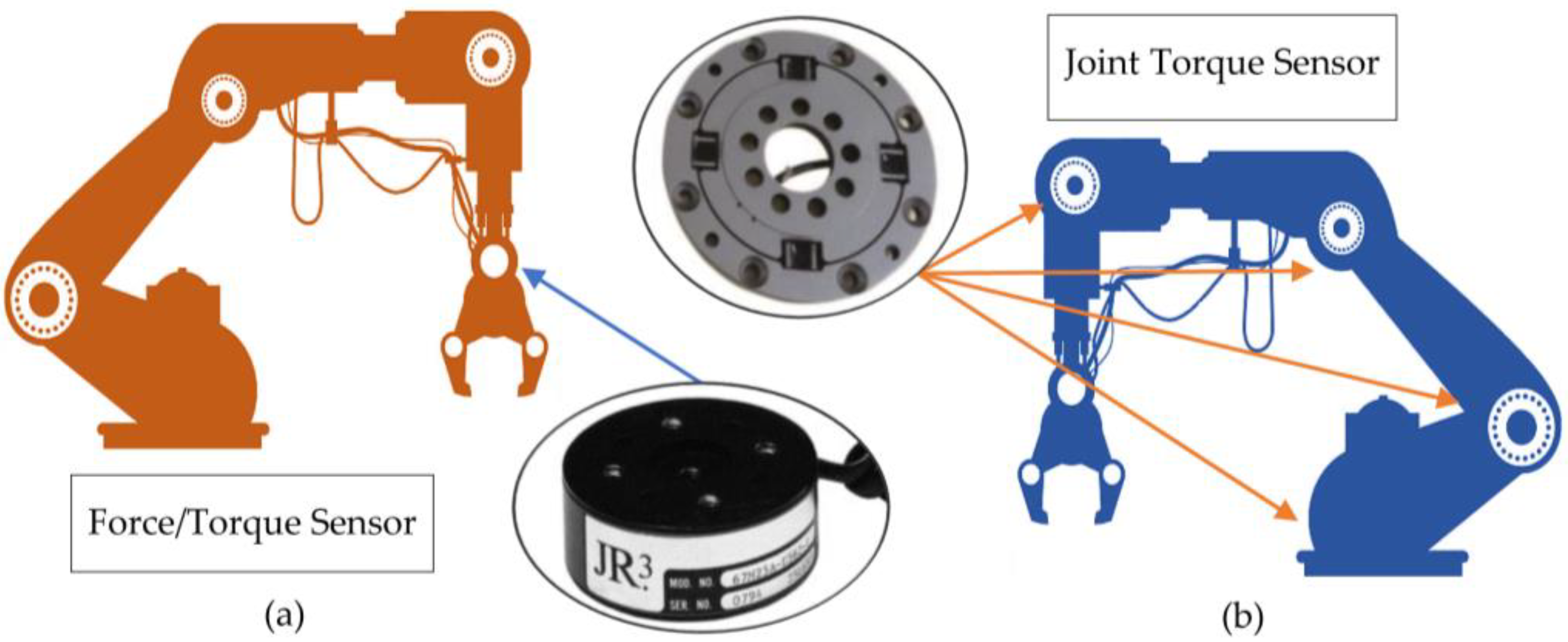
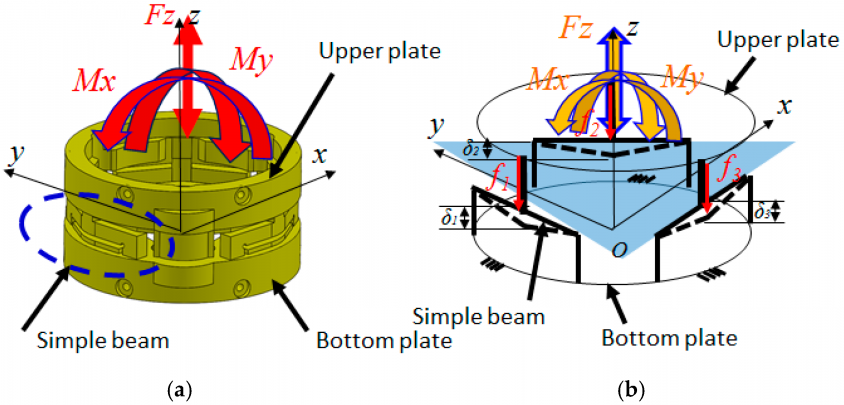
关节扭矩传感器的基本原理是应变测量。当机器人关节运动时,扭矩传感器会感受到由机器人关节施加在传感器上的力矩,这会导致传感器发生微小的形变。扭矩传感器通过测量这种形变来确定扭矩的大小。
在机器人关节中,扭矩的传递通过齿轮、轴承和其他传动部件实现。传感器通常被安装在这些传动部件中的一个上,以便测量扭矩。其中一种常见的传感器类型是应变片传感器。
机器人关节力控制系统主要通过对机器人的每个关节进行控制,实现机器人的运动控制、定位以及精确度的保持。一般来说,机器人关节力控制系统主要由伺服驱动器、编码器、控制器等组成。
搭建机器人关节力控制系统需要以下步骤:
- 选择合适的电机和传感器。电机的选取要符合机器人的要求,例如扭矩和速度范围。传感器的选择则取决于需要监测的参数,如位置、速度和力量。
- 编写适当的控制算法。一个常用的算法是PID控制算法。PID控制算法基于误差信号,它通过比较实际位置和期望位置之间的差异来调整电机的输出。这个差异作为反馈信号用于控制系统的调整。
- 利用动力学模型描述机器人腿部的运动学和动力学特性。基于动力学模型,可以分析机器人腿部运动的稳定性和平衡性,进而根据需要进行控制参数的调整。
- 选择合适的控制系统硬件,例如单片机、PC机、工控机等,以及与硬件相匹配的操作系统和编译环境。
- 设计和实现控制系统通信,例如选择合适的通信协议和通信方式,以确保各部件间的信息传输的准确性和实时性。
UR机器人与外部环境接触时,安装在机器人末端执行器上的力觉传感器会检测到机器人施加在外部环境上的力。这些力信号会被转化为电信号,然后传输到机器人的控制系统。在控制系统中,这些电信号会被进一步处理并用于计算机器人的位置、速度和加速度等运动参数。
根据机器人的运动参数和操作要求,控制系统会计算出必要的力量和运动,以实现精确的操作。这种力控原理的实现方式可以提高机器人在操作过程中的稳定性和安全性,同时减少对外部环境的损害。
URe系列机器人是一种能够实现自主作业的机器人,其中末端力控是其重要的技术之一。
末端力控是指控制机器人末端执行器的力量,使其能够适应不同的操作需求,同时避免对外部环境造成损害。URe系列机器人的末端力控是通过力觉传感器来实现的。
首先,安装在机器人末端执行器上的力觉传感器会检测到机器人施加在外部环境上的力,并将这些力信号转化为电信号传输到机器人的控制系统。在控制系统中,这些电信号会被进一步处理并用于计算机器人的位置、速度和加速度等运动参数。
其次,根据机器人的运动参数和操作要求,控制系统会计算出必要的力量和运动,以实现精确的操作。这种力控原理的实现方式可以提高机器人在操作过程中的稳定性和安全性,同时减少对外部环境的损害。
此外,URe系列机器人在进行力控时还可以采用其他技术,如导纳控制、阻抗控制等。这些技术可以帮助机器人更好地适应不同的操作环境,提高其操作能力和适应性。
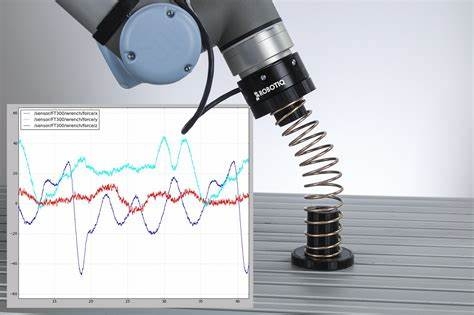
六维力传感器是机器人力控解决方案中应用最广泛的传感器之一,其性能更好,成本也相对较高。通过使用六维力传感器,URe系列机器人可以更好地感知其操作环境,从而进行更精确的操作,提高生产效率和质量。
点击力控机器人原理及力控制实现 - 古月居可查看全文
相关文章:
力控机器人原理及力控制实现
力控机器人原理及力控制实现 力控机器人是一种能够感知力量并具有实时控制能力的机器人系统。它们可以在与人类进行精准协作和合作时,将力传感技术(Force Sensing Technology)和控制算法(Control Algorithm)结合起来&a…...

最小生成树
最小生成树问题是指给定一个带权的无向图,删除一些边使得这个无向图变成一棵树,并且权值之和最小。 解决此类问题的方法主要有两种:Prim算法,Kruskal算法 Prim 算法 从一个点开始,逐步扩展,每次选择权值…...
二维动画制作软件 Animate 2024 for mac激活版
Animate 2024 for Mac是一款功能强大的二维动画制作软件,专为Mac用户打造。它提供了丰富的动画编辑功能,使用户能够轻松创建出生动逼真的动画作品。无论是短片、广告还是游戏等应用领域,Animate 2024都能发挥出出色的表现。 软件下载…...
相对论中关于光速不变理解的补充
近几个月在物理直播间聊爱因斯坦相对论,发现好多人在理解爱因斯坦相对论关于基本假设,普遍认为光速是不变的,质能方程 中光速的光速不变的,在这里我对这个假设需要做一个补充,他是基于质能方程将光速C 在真是光速变化曲…...

面试(04)————JavaWeb
1、网络通讯部分 1.1、 TCP 与 UDP 区别? 1.2、什么是 HTTP 协议? 1.3、TCP 的三次握手,为什么? 1.4、HTTP 中重定向和请求转发的区别? 1.5、 Get 和 Post 的区别? 2、cookie 和 session 的区别&am…...
Debian12 使用 nginx 与 php8.2 使用 Nextcloud
最近将小服务器升级了下系统,使用了 debian12 的版本,正好试试 nginx 和 php-fpm 这种方式运行 Nextcloud 这个私有云的配置。 一、基本系统及应用安装 系统:debian12 x86_64 位版本最小安装,安装后可根据自己需求安装一些工具&…...

Java设计模式:代理模式的静态和动态之分(八)
码到三十五 : 个人主页 心中有诗画,指尖舞代码,目光览世界,步履越千山,人间尽值得 ! 在软件设计中,代理模式是一种常用的设计模式,它为我们提供了一种方式来控制对原始对象的访问。在Java中&a…...

【论文通读】AgentStudio: A Toolkit for Building General Virtual Agents
AgentStudio: A Toolkit for Building General Virtual Agents 前言AbstractMotivationFramework评估GUI GroudingReal-World Cross-Application Benchmark Suite Conclusion 前言 来自昆仑万维的一篇智能体环境数据大一统框架工作,对未来计算机智能体的发展具有指…...

wordvect嵌入和bert嵌入的区别
Word2Vec 嵌入和 BERT 嵌入之间有几个关键区别: 训练方式: Word2Vec:Word2Vec 是一个基于神经网络的词嵌入模型,它通过训练一个浅层的神经网络来学习单词的分布式表示。它有两种训练方式:连续词袋模型(CBOW…...

渗透测试练习题解析 5(CTF web)
1、[安洵杯 2019]easy_serialize_php 1 考点:PHP 反序列化逃逸 变量覆盖 【代码审计】 通过 GET 的方式获取参数 f 的值,传递给变量 function 定义一个过滤函数,过滤掉特定字符(用空字符替换) 下面的代码其实没什么用…...
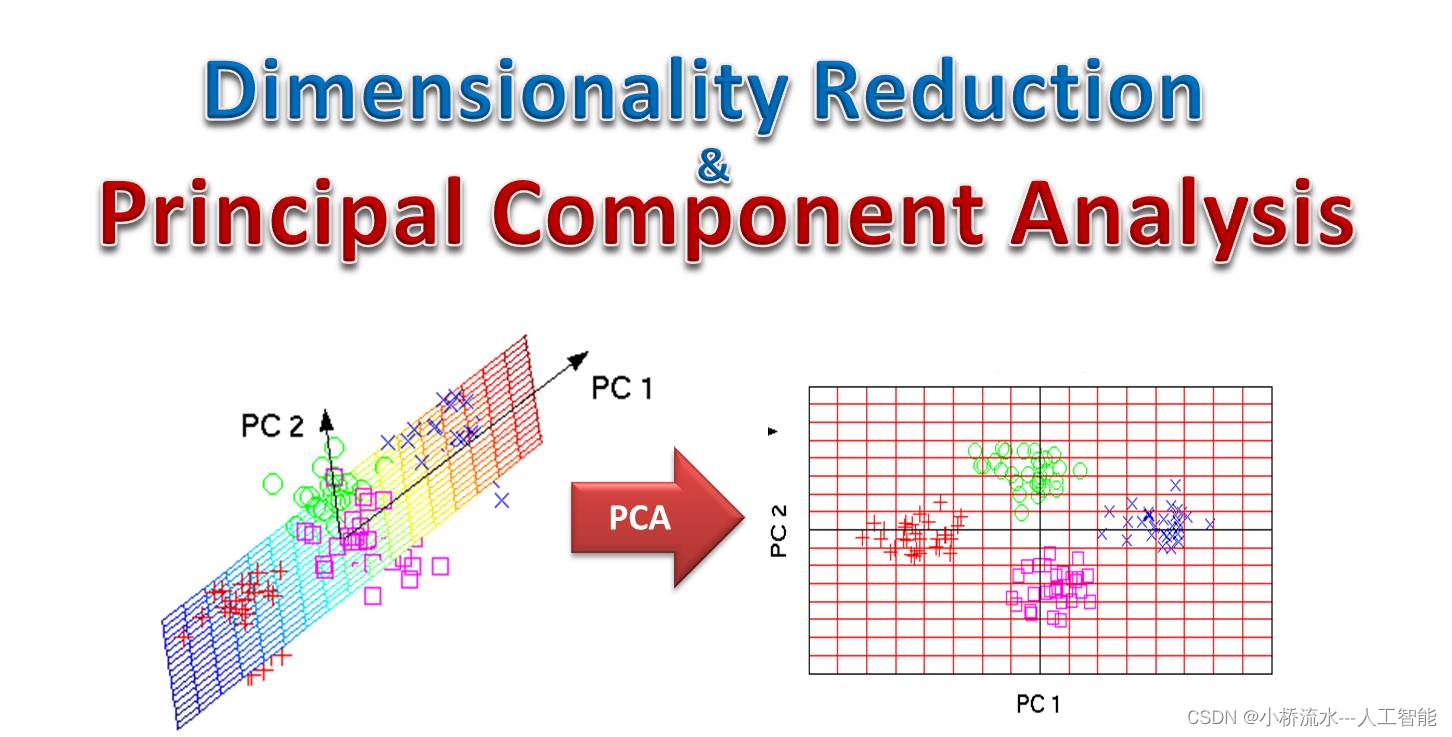
PCA(Principal Component Analysis,主成分分析)
PCA(Principal Component Analysis,主成分分析)是一种在数据分析中广泛应用的统计方法,主要用于数据降维、可视化和去噪。以下是对PCA的发展史、工作原理以及理论基础的详细解释: Principal Component Analysis 一、PC…...
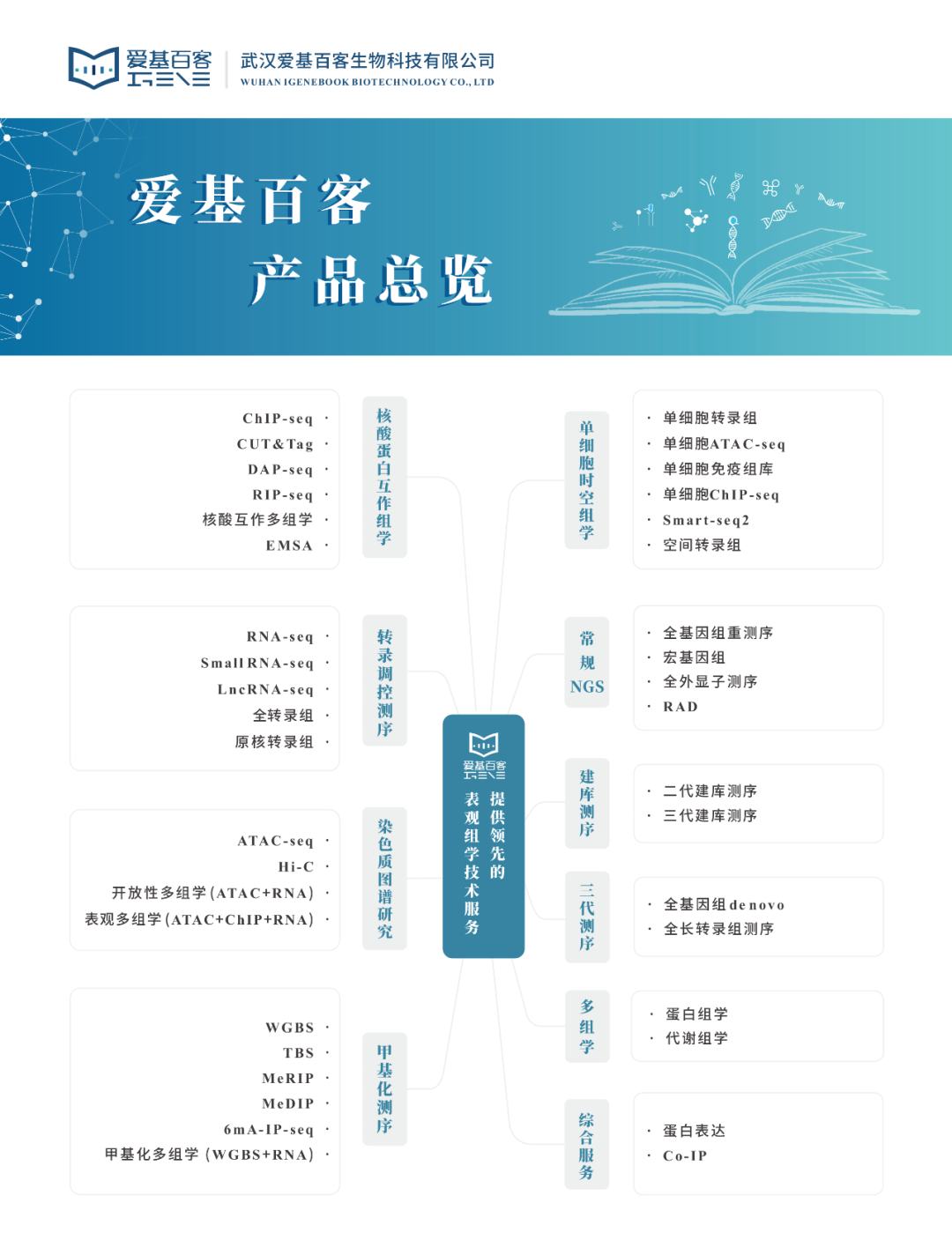
干货 | 探索CUTTag:从样本到文库,实验步步为营!
CUT&Tag(Cleavage Under Targets and Tagmentation)是一种新型DNA-蛋白互作研究技术,主要用于研究转录因子或组蛋白修饰在全基因组上的结合或分布位点。相比于传统的ChIP-seq技术,CUT&Tag反应在细胞内进行,创新…...

提质不增本,降本不降质
#公益巡讲# #质量万里行# 公开课、沙龙活动...
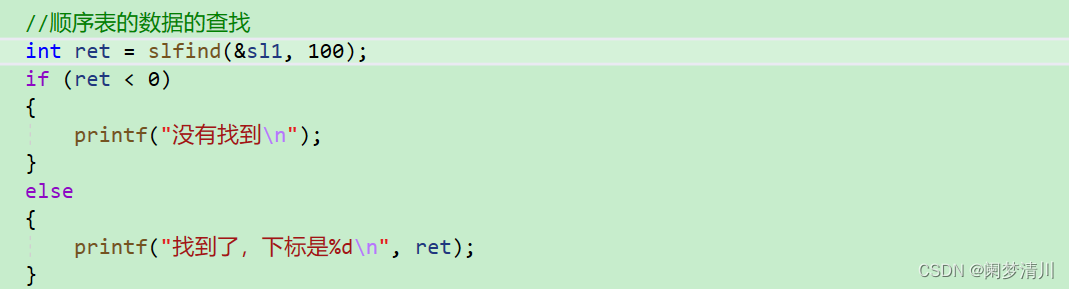
数据结构---顺序表实现
目录 1.顺序表 2.动态顺序表的实现 (4)顺序表初始化 (5)顺序表销毁 (6)顺序表的插入 a.尾插 b.头插 (7)顺序表的删除 a.尾删 b.头删 (8)指定位置之…...

python docx 添加动态表格
在Python中,使用python-docx库可以创建Word文档并添加动态表格。以下是一个简单的例子,演示如何创建一个包含动态内容的表格: from docx import Document# 创建一个Word文档 document Document()# 添加一个标题 document.add_heading(动态表…...
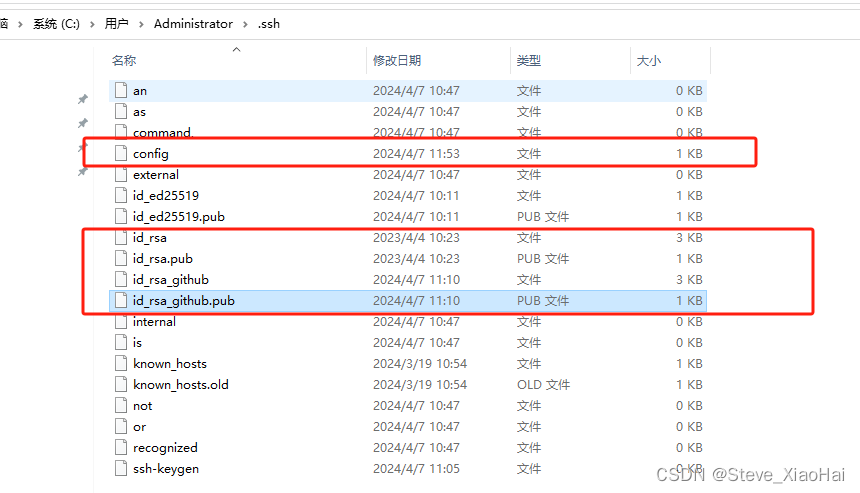
git配置多SSH
目的: 一台电脑可以让github、gitee等账号同时存在,让不同账号配置不同的密钥 第一步:创建不同平台的SSH公钥 执行命令: ssh-keygen -t rsa -C "对应仓库邮箱地址" -f ~/.ssh/id_rsa.github 如果执行上面的命令&…...
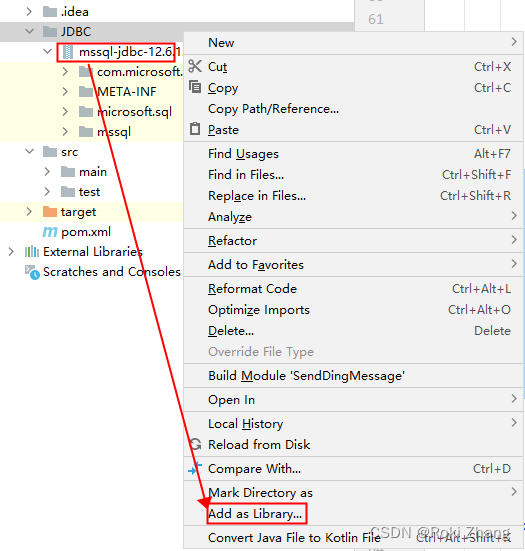
IDEA连接SqlServer数据库
目录 下载jar包 下载sqljdbc_12.6压缩包 解压 导入IDEA 新建文件夹 复制粘贴进JDBC文件夹并设为library 编写类及方法 代码 下载jar包 以sqljdbc_12.6为例 下载sqljdbc_12.6压缩包 最新地址:sqljdbc 官方最新地址 解压 解压即用 导入IDEA 新建文件夹 复制…...
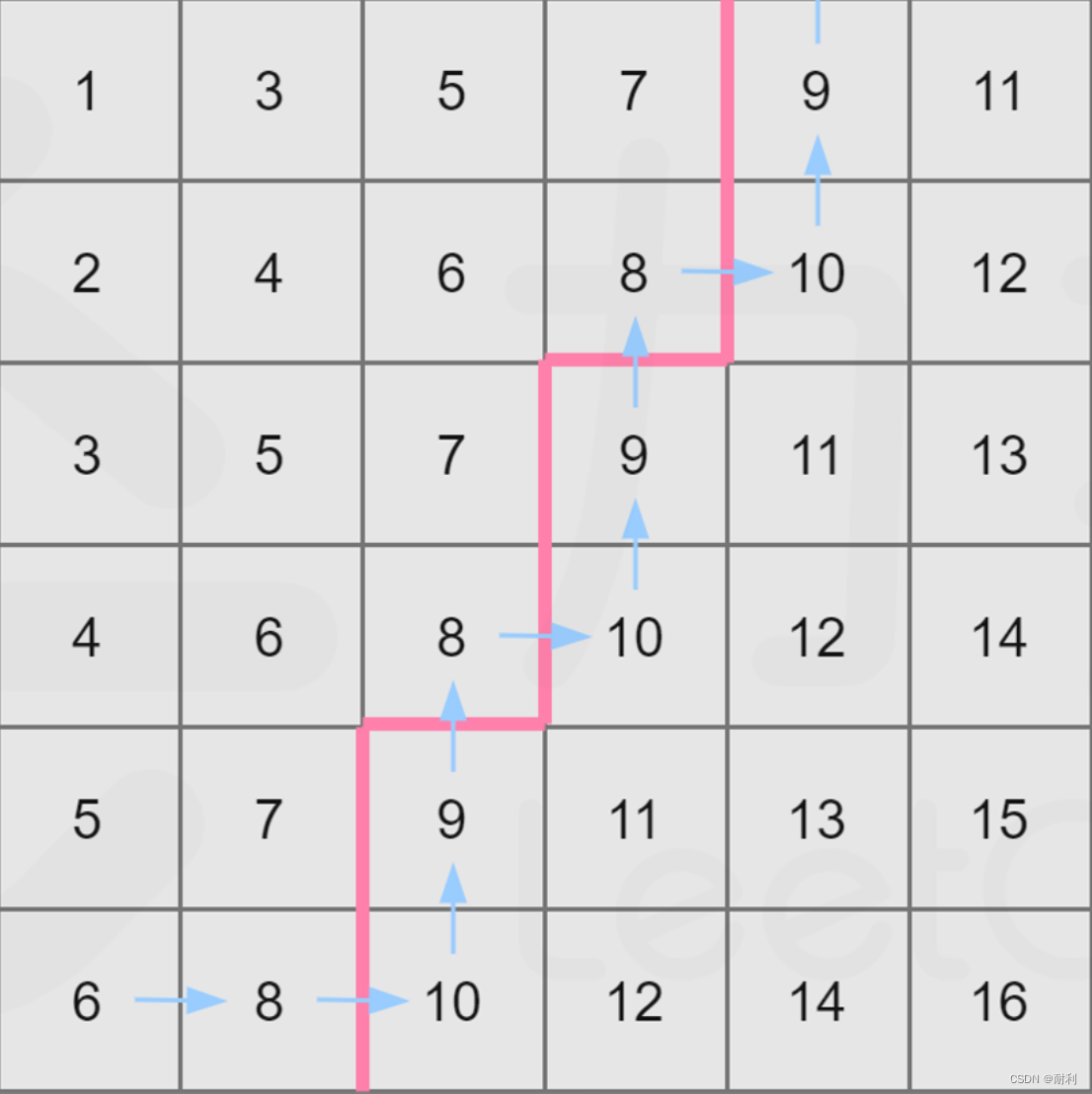
LeetCode 378 有序矩阵中第K小的元素
题目信息 LeetoCode地址: . - 力扣(LeetCode) 题解内容大量转载于:. - 力扣(LeetCode) 题目理解 题意很直观,就是求二维矩阵中所有元素排序后第k小的数。 最小堆写法 该写法不再赘述,维护…...

Vue3(domdiff)最长递归子序列求解简易版(超简单)
Vue3(domdiff)最长递归子序列求解简易版 ⚠️ 关键词(每一个都需要理解)js 代码实现写完感想欢迎关注 ⚠️ 关键词(每一个都需要理解) 动态规划(O(N^2))(不提倡…...

LLaMA-Factory+qwen多轮对话微调
LLaMA-Factory地址:https://github.com/hiyouga/LLaMA-Factory/blob/main/README_zh.md qwen地址:https://huggingface.co/Qwen/Qwen-7B-Chat/tree/main 数据准备 数据样例 [ {"id": "x3959", "conversations": [{&qu…...

k8s——RBAC认证中心
一、整体流程:认证 → 授权 → 准入控制在 Kubernetes 中,所有操作都要通过 API Server。当你(或某个程序)想对集群做任何事(比如创建一个 Pod),必须经过三步检查:认证:你…...

NVIDIA Profile Inspector终极指南:200+隐藏参数解锁显卡性能新高度
NVIDIA Profile Inspector终极指南:200隐藏参数解锁显卡性能新高度 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector是一款功能强大的显卡驱动参数调校工具…...

AI任务自动化五阶段工作流:从需求到代码的可靠实践
1. 项目概述:从混乱到有序的AI任务自动化五阶段工作流上次我们聊了这套自动化系统的技术架构,把JIRA、GitHub和Cursor智能体串了起来。今天咱们不聊“怎么连”,聊聊“怎么跑”——也就是那个能把一个粗糙的需求工单,最终变成一行行…...

AI Agent技能生成器:从零创建精准高效的SKILL.md文件
1. 项目概述:一个为AI Agent生成“技能说明书”的元技能如果你和我一样,经常在Claude Code、Cursor或者Codex这类AI编程助手工具里折腾,想让它帮你处理一些特定的、重复性的开发任务,那你肯定对“技能”(Skill…...

【ElevenLabs商业增长实战手册】:20年AI语音赛道老兵亲授从0到月营收$2M的7个关键跃迁节点
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs商业增长的核心范式迁移 传统AI语音服务商长期依赖“API调用量时长计费”模型,而ElevenLabs正系统性重构价值交付逻辑——从卖计算资源转向卖情感可信度与品牌声纹资产。这一迁移…...

为什么92%的实时数仓项目在2025Q4突然转向AI原生平台?——奇点大会12家头部企业联合验证数据披露
更多请点击: https://intelliparadigm.com 第一章:AI原生实时计算平台:2026奇点智能技术大会流批一体实践 在2026奇点智能技术大会上,新一代AI原生实时计算平台正式发布,其核心突破在于将大模型推理调度、向量流式计算…...

C语言核心知识体系总结
C语言核心知识体系总结本文旨在系统梳理C语言的基础与进阶知识点,帮助读者建立清晰的知识框架。内容涵盖:程序编译过程、数据类型与变量、运算符与表达式、控制结构、函数、指针、结构体与共用体、动态内存分配、文件操作等。适合复习巩固或查漏补缺。第…...

技术栈选择的跟风陷阱:新潮技术与稳定性的平衡
在软件测试行业,技术迭代的速度如同飞驰的列车,新的测试框架、自动化工具、性能分析平台等层出不穷。从早期的Selenium到如今的Playwright,从JUnit到TestNG,再到新兴的Cypress、Pytest等,每一种新技术的出现都伴随着行…...

华为OD机试真题 新系统 2026-05-06 JavaGoC语言 实现【匹配命令行前缀关键字】
目录 题目 思路 Code 题目 给定一组命令行字符串和一个命令前缀,需要找出所有以前缀开头的命令行表达式中,前缀之后的第一个关键字,并将这些关键字按字典序排序后返回。 如果找不到匹配前缀则返回空;匹配出多个相同关键字时只返…...

从玩具到生产:基于run-llama/rags构建模块化RAG系统的工程实践
1. 项目概述:从“玩具”到“生产力”的RAG系统构建如果你最近在关注大语言模型的应用落地,那么“RAG”这个词一定高频出现在你的视野里。RAG,即检索增强生成,它试图解决大模型“一本正经胡说八道”和“知识陈旧”两大核心痛点。简…...