yolov5旋转目标检测遥感图像检测-无人机旋转目标检测(代码和原理)
YOLOv5(You Only Look Once version 5)是一个流行且高效的实时目标检测深度学习模型,最初设计用于处理图像中的水平矩形边界框目标。然而,对于旋转目标检测,通常需要对原始YOLOv5架构进行扩展或修改,以便能够检测具有任意角度的对象,比如倾斜的车牌、风力发电机叶片或者卫星图像上的建筑物等。
在现实生活中的应用包括但不限于以下几个方面:
1. 交通安全监控:在交通监控系统中,可以用来识别和定位倾斜的车牌号码,以及检测不规则停放的车辆。
2.无人机巡检:对电力线、风力发电机叶片等设施进行状态监测时,需要准确地检测并测量其旋转角度。
3. 遥感与GIS(地理信息系统):在卫星或航拍图像中检测不同朝向的建筑物、道路标志以及其他地物。
4. 工业质检:在制造业中,用于检测生产线上的零部件是否以正确角度放置或装配。
5. 农业监测:通过航拍图像识别农作物生长状况、病虫害分布情况时,可能需要检测到非正交方向的田间特征。
6. 医学影像分析:在某些医疗影像如X光片或CT扫描中,识别特定器官或结构的形态和角度。
为了实现YOLOv5的旋转目标检测能力,研究者们通常会在训练过程中引入一种新的损失函数来估计目标的角度信息,并且在输出层添加额外的参数预测边界框的角度。此外,可能还会调整网络架构以适应旋转边界框的表示。通过这样的改进,YOLOv5就能够应用于更广泛和复杂的目标检测场景。
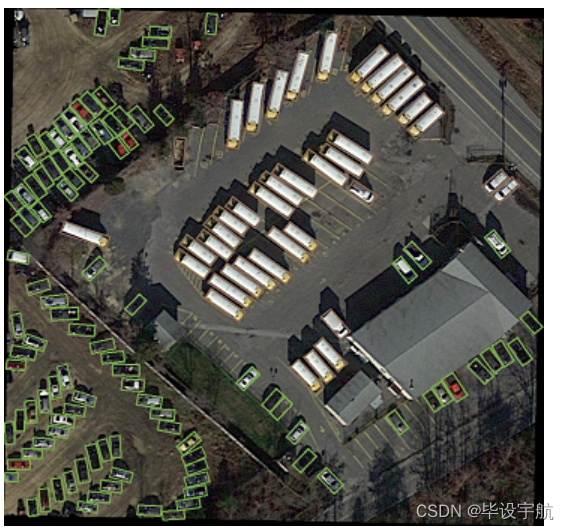
旋转目标检测:传统的目标检测算法主要针对水平或垂直方向的目标,而在遥感图像和无人机应用中,目标常常以各种角度出现。因此,针对旋转目标的检测成为一个重要的研究方向。
遥感图像检测:遥感图像通常包含了大范围的地理信息,如建筑物、道路、农田等。利用YOLOv5进行遥感图像检测可以快速准确地识别出这些目标,从而帮助农业、城市规划等应用
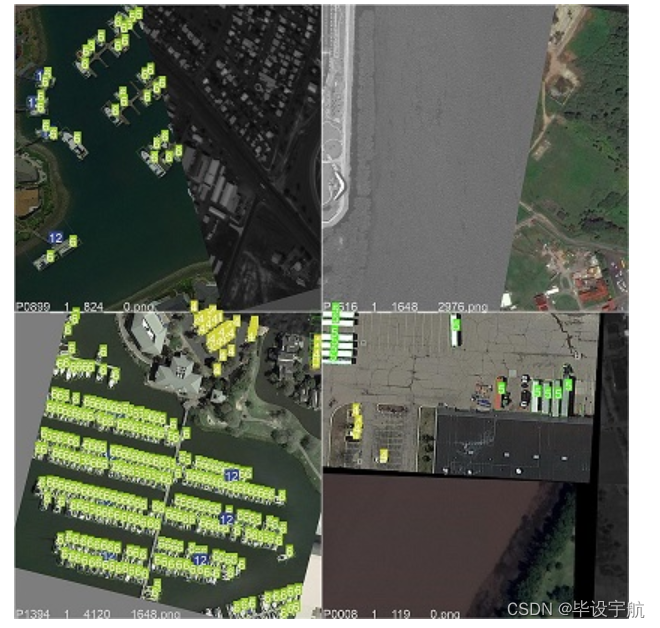
无人机旋转目标检测:无人机在航拍过程中,由于姿态变化和目标运动,导致拍摄到的目标可能以各种角度存在。利用YOLOv5进行无人机旋转目标检测可以有效地识别出目标,并进行跟踪或其他后续处理。
数据集和训练:为了实现旋转目标检测,需要准备旋转目标的数据集,并对YOLOv5进行相应的调整和训练。数据集可以包含具有各种旋转角度的目标图像,并进行标注。
模型调优:针对旋转目标检测任务,可能需要对YOLOv5模型进行一些调优,例如增加网络层数、调整损失函数等,以提升检测准确率和鲁棒性。

代码安装:
安装要求:
Linux(建议使用);Windows(不建议使用,请参考此问题,如果您在生成utils/nms_rotated_ext.cpython-XX-XX-XX-XX.so方面遇到困难)
Python 3.7+
PyTorch ≥ 1.7
CUDA 9.0或更高版本
我已经测试了以下操作系统和软件版本:
操作系统:Ubuntu 16.04/18.04
CUDA:10.0/10.1/10.2/11.3
安装步骤:
a. 创建conda虚拟环境并激活,例如:
conda create -n Py39_Torch1.10_cu11.3 python=3.9 -y
source activate Py39_Torch1.10_cu11.3
b. 确保您的CUDA运行时API版本≤CUDA驱动程序版本。 (例如11.3 ≤ 11.4)
nvcc -V
nvidia-smi
c. 按照官方说明安装PyTorch和torchvision,确保cudatoolkit版本与CUDA运行时API版本相同,例如:
pip3 install torch==1.10.1+cu113 torchvision==0.11.2+cu113 torchaudio==0.10.1+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html
nvcc -V
python
import torch
torch.version.cuda
exit()pip install -r requirements.txt
cd utils/nms_rotated
python setup.py develop #或"pip install -v -e ."
运行demo
Usage:$ python path/to/detect.py --weights yolov5_rotate.pt --source 0 # webcamimg.jpg # imagevid.mp4 # videopath/ # directorypath/*.jpg # glob'https://youtu.be/Zgi9g1ksQHc' # YouTube'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
结果展示

相关文章:
yolov5旋转目标检测遥感图像检测-无人机旋转目标检测(代码和原理)
YOLOv5(You Only Look Once version 5)是一个流行且高效的实时目标检测深度学习模型,最初设计用于处理图像中的水平矩形边界框目标。然而,对于旋转目标检测,通常需要对原始YOLOv5架构进行扩展或修改,以便能…...

云手机提供私域流量变现方案
当今数字营销领域,私域流量是一座巨大的金矿,然而并非人人能够轻易挖掘。一家营销公司面临着利用社交、社区、自媒体等应用积累私域流量,并通过销售产品、推送广告等方式实现流量变现的挑战与困境。本文将详细介绍这家公司是如何通过云手机&a…...
树的基本概念与二叉树
文章目录 树的基本概念与二叉树一、树的概念和结构1. 树的概念2. 树的相关概念 二、树的存储1. 左孩子右兄弟表示法2. 双亲表示法 三、二叉树1. 特殊的二叉树1.1 满二叉树1.2 完全二叉树 树的基本概念与二叉树 一、树的概念和结构 1. 树的概念 树是一种非线性的数据结构,它是…...

什么是物理服务器?
物理服务器又叫做独立服务器,指物理上的单独服务器,是有着实体的服务器并不是虚拟的,物理服务器也可以理解成一台超大的电脑,但是对于普通的家用电脑来说,物理服务器需要长期处于开机的状态,对于硬件性能消…...
数据结构:详解【树和二叉树】
1. 树的概念及结构(了解) 1.1 树的概念 树是一种非线性的数据结构,它是由n(n>0)个有限结点组成一个具有层次关系的集合。把它叫做树是因为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝…...
“成像光谱遥感技术中的AI革命:ChatGPT在遥感领域中的应用“
遥感技术主要通过卫星和飞机从远处观察和测量我们的环境,是理解和监测地球物理、化学和生物系统的基石。ChatGPT是由OpenAI开发的最先进的语言模型,在理解和生成人类语言方面表现出了非凡的能力。本文重点介绍ChatGPT在遥感中的应用,人工智能…...
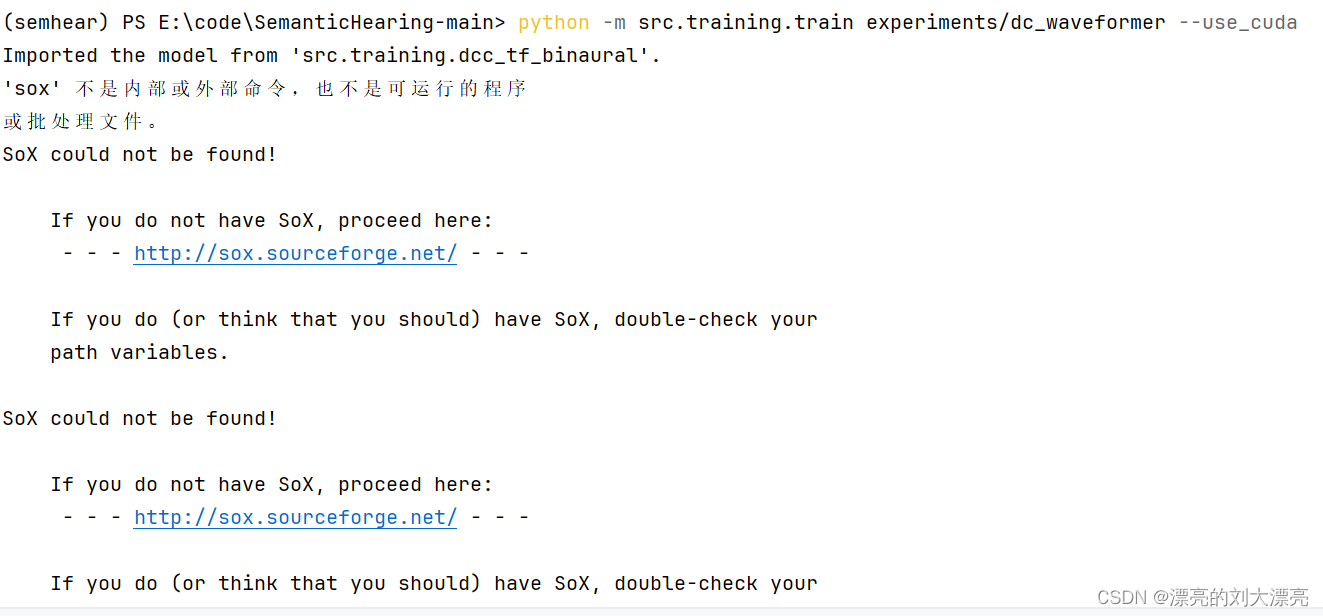
semhear环境sox
这里写自定义目录标题 pip list 看到当前环境下已经有sox了怀疑跟torchaudio和torchvision有关,更新了一下:装了torchvisionsox还是找不到 pip list 看到当前环境下已经有sox了 怀疑跟torchaudio和torchvision有关,更新了一下: p…...

如何快速开启一个项目-ApiHug - API design Copilot
ApiHug101-001开启篇 🤗 ApiHug {Postman|Swagger|Api...} 快↑ 准√ 省↓ GitHub - apihug/apihug.com: All abou the Apihug apihug.com: 有爱,有温度,有质量,有信任ApiHug - API design Copilot - IntelliJ IDEs Plugin |…...
从用友U9到钉钉通过接口配置打通数据
从用友U9到钉钉通过接口配置打通数据 接通系统:用友U9 用友U9cloud深耕制造领域十三载,U9cloud在机械、电子、汽配、家具、整车、军工等细分行业有着深厚的积累,尤其是机械、电子和汽配行业,不但打造了多个成熟的产品模式和应用场…...
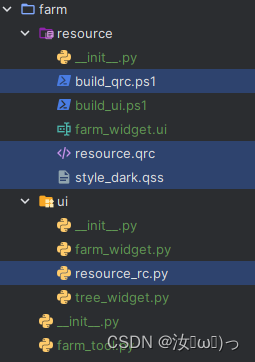
PyQt qrc2py 使用PowerShell将qrc文件转为py文件并且将导入模块PyQt或PySide转换为qtpy模块开箱即用
前言 由于需要使用不同的qt环境(PySide,PyQt)所以写了这个脚本,使用找到的随便一个rcc命令去转换qrc文件,然后将导入模块换成qtpy这个通用库(支持pyside2-6,pyqt5-6),老版本的是Qt.py(支持pysi…...
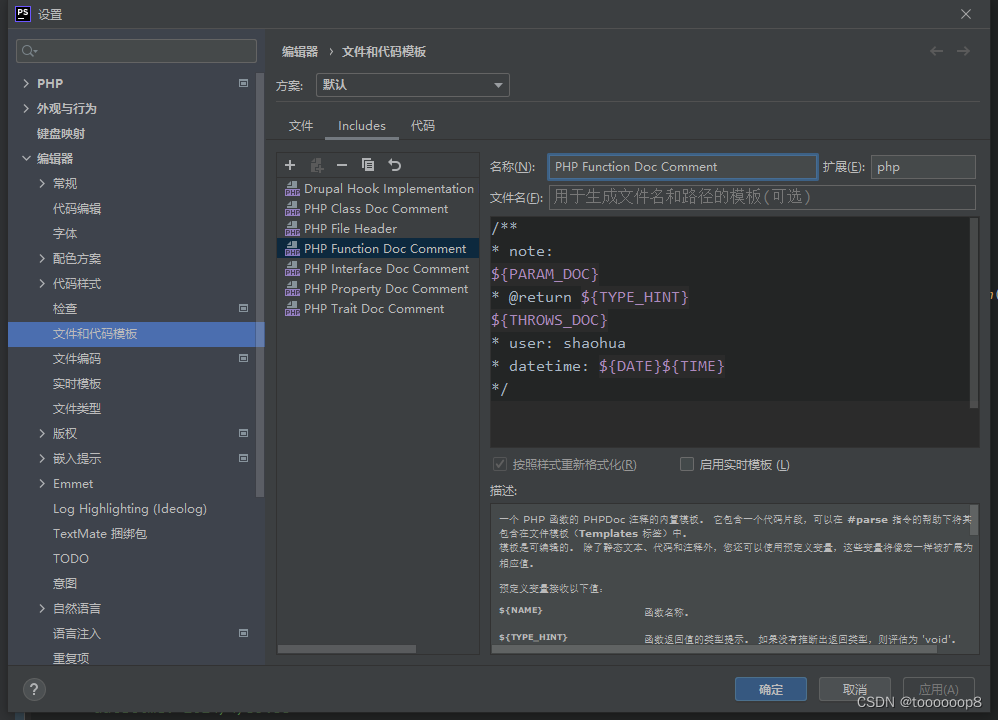
phpstorm设置头部注释和自定义注释内容
先说设置位置: PhpStorm中文件、类、函数等注释的设置在:setting-》Editor-》FIle and Code Template-》Includes-》PHP Function Doc Comment下设置即可,其中方法的默认是这样的: /** ${PARAM_DOC} #if (${TYPE_HINT} ! "…...

【数据分析面试】10. 计算平均通勤时间(SQL:timestampdiff() 和datediff()区别)
题目 假设你在Uber工作。rides表包含了关于Uber用户在美国各地的行程信息。 编写一个查询,以获取纽约(NY)每位通勤者的平均通勤时间(以分钟为单位),以及纽约所有通勤者的平均通勤时间(以分钟为…...
)
2024年150道高频Java面试题(二十二)
43. ArrayList 和 Vector 的区别是什么? ArrayList 和 Vector 是 Java 中用于存储对象的两种不同类型的动态数组。它们都实现了 List 接口,但存在一些重要的区别: 同步性: ArrayList 是不同步的,意味着它不是线程安全…...
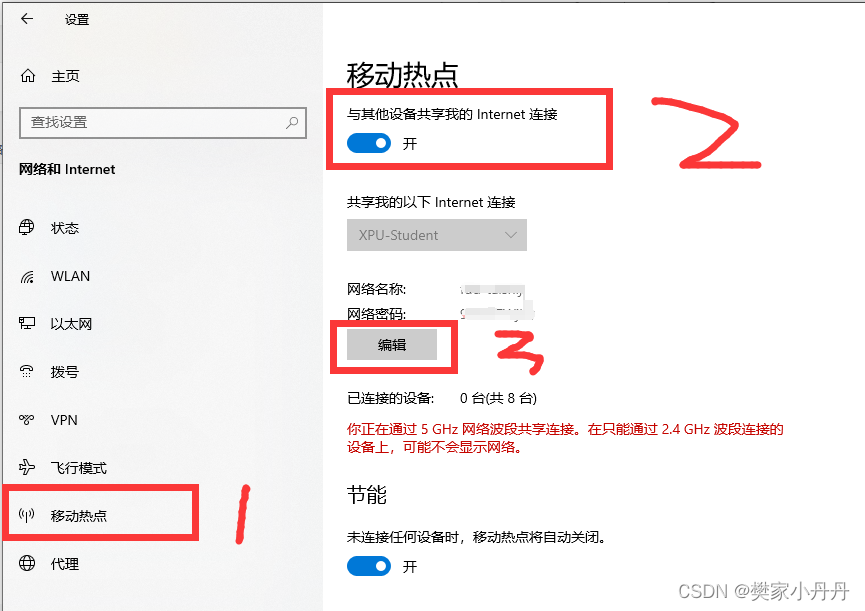
如何使用校园网——Win10笔记本,台式机互开热点
当我们使用校园网的时候,往往只能连接一个电脑端,但是又想两个机子同时连接WIFI怎么办呢? 当然,前提条件是你先得其中一台电脑有网络哈 1、打开想开共享热点的电脑的设置 A、点击WIN,再点击设置 2、点击网络和Inte…...

c#:简洁实现if-else语句
c#:简洁实现if-else语句 在C#中,可以使用三元运算符(? :)来简洁地实现if-else语句。其语法格式为: 条件表达式 ? 表达式1 : 表达式2 例如:当条件表达式为真时,返回表达式1的值,否…...
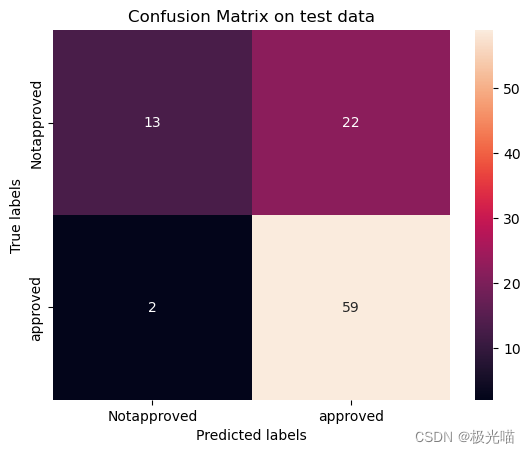
金融贷款批准预测项目
注意:本文引用自专业人工智能社区Venus AI 更多AI知识请参考原站 ([www.aideeplearning.cn]) 在金融服务行业,贷款审批是一项关键任务,它不仅关系到资金的安全,还直接影响到金融机构的运营效率和风险管理…...
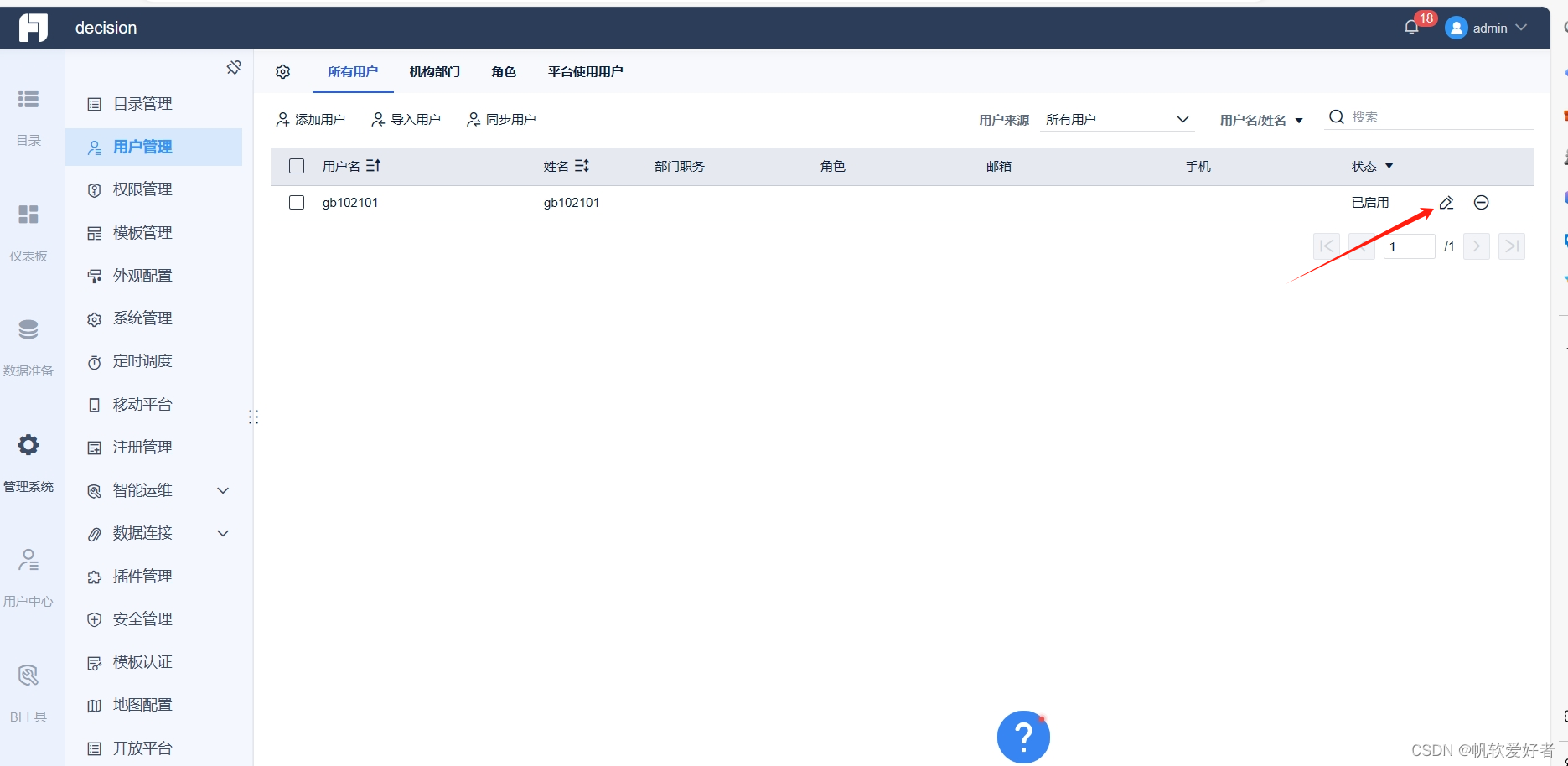
FR中隐藏系统管理--用户管理中 表格中每条数据中的编辑按钮,删除按钮
比如隐藏删除按钮: var userTableTools BI.Constants.getConstant("dec.constant.user.table.tools")for(var key in userTableTools){if(key "delete"){var deleteItem userTableTools["delete"]deleteItem.invisible true;}}...

函数重载和引用【C++】
文章目录 函数重载什么是函数重载?函数重载的作用使用函数重载的注意点为什么C可以函数重载,C语言不行? 引用什么是引用?引用的语法引用的特点引用的使用场景引用的底层实现传参时传引用和传值的效率引用和指针的区别 函数重载 什…...

rust-tokio发布考古
源头: Carl Lerche Aug 4, 2016 I’m very excited to announce a project that has been a long time in the making. 我很兴奋地宣布一个酝酿已久的项目。 Tokio is a network application framework for rapid development and highly scalable deployments…...
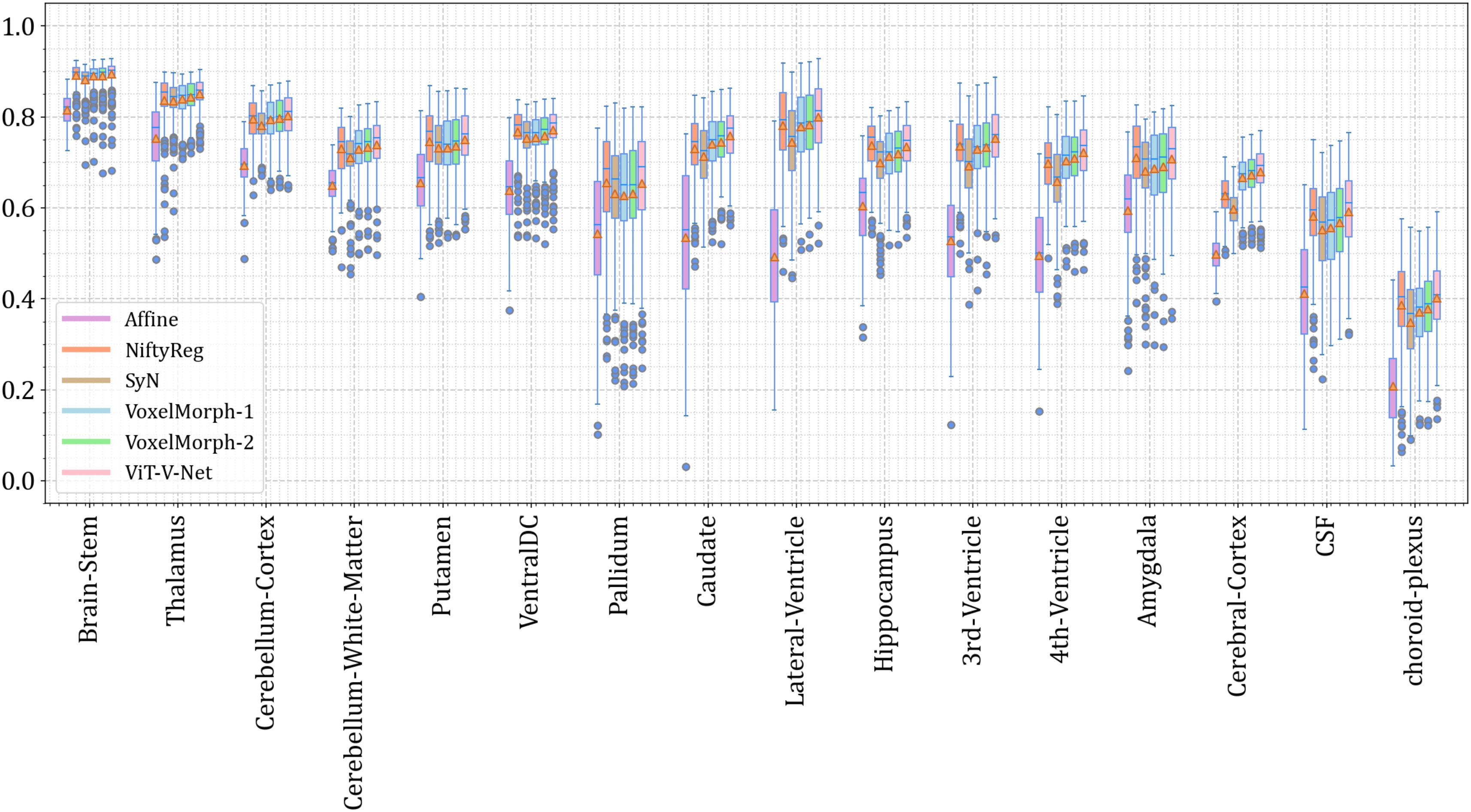
3D医疗图像配准 | 基于Vision-Transformer+Pytorch实现的3D医疗图像配准算法
项目应用场景 面向医疗图像配准场景,项目采用 Pytorch ViT 来实现,形态为 3D 医疗图像的配准。 项目效果 项目细节 > 具体参见项目 README.md (1) 模型架构 (2) Vision Transformer 架构 (3) 量化结果分析 项目获取 https://download.csdn.net/down…...

转子永磁式无刷混合励磁电机关键技术【附仿真】
✨ 长期致力于次谐波、无刷调磁、有限元建模与分析、多目标鲁棒优化、弱磁运行研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于次谐波调制与变电流…...

深入解析Roll:轻量级滚动动画库的设计原理与工程实践
1. 项目概述:一个轻量级、可扩展的滚动动画库在Web前端开发中,滚动动画(Scroll Animation)早已不是新鲜概念。从早期简单的视差效果,到如今复杂的元素交互动画,滚动动画已经成为提升用户体验、增强页面叙事…...
)
告别纯视觉追踪:手把手教你用Refer-KITTI数据集复现RMOT实验(含环境配置避坑指南)
告别纯视觉追踪:手把手教你用Refer-KITTI数据集复现RMOT实验(含环境配置避坑指南) 在计算机视觉领域,多目标跟踪(Multi-Object Tracking, MOT)一直是研究热点,而近年来结合语言特征的Referring Multi-Object Tracking(…...

长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受 作为一名中度频率的大模型API使用者,我的日常工作涉及代码生…...

Vivado里写状态机总出警告?聊聊三段式、二段式的选择与那些让人头疼的Latch和Combinatorial Loop
Vivado状态机设计实战:从三段式优化到Latch消除全攻略 状态机设计中的典型痛点与EDA工具特性 第一次在Vivado中看到"Inferring Latch"警告时,我盯着综合报告发了半小时呆——明明代码逻辑完全正确,为什么工具非要"自作主张&qu…...

备战蓝桥杯别只刷题了!用2023年JavaB组真题手把手教你锻炼“竞赛思维”
从2023年蓝桥杯JavaB组真题看竞赛思维的三大核心能力 在算法竞赛的征途上,许多选手常常陷入"题海战术"的误区,认为刷题数量直接决定比赛成绩。然而,2023年第十四届蓝桥杯JavaB组的真题却向我们揭示了一个更深刻的真相:竞…...

Cursor AI插件深度解析:从自动化脚本到智能编程工作流
1. 项目概述:一个为 Cursor 编辑器注入灵魂的 AI 增强插件如果你和我一样,日常开发重度依赖 Cursor 这款“AI 原生”编辑器,那你一定体验过它内置的 AI 对话和代码生成带来的效率提升。但用久了,你可能会发现一些痒点:…...

卡片里放图片?用 memory:// 协议才是正确打开方式
文章目录卡片图片的限制项目结构卡片 UI:用 memory:// 显示图片FormAbility:下载图片 → 写入共享内存 → 推送更新显示本地图片(无需下载)memory:// 协议原理关键注意事项写在最后卡片里显示图片这件事比我想象的要麻烦一点。卡片…...
)
告别安装报错!Windows 10/11 保姆级 MySQL 5.7.44 配置指南(含my.ini文件详解)
Windows 10/11 下 MySQL 5.7.44 终极安装指南:从避坑到精通配置 每次在Windows系统上安装MySQL,总会有那么几个"经典"错误让人抓狂——服务启动失败、初始化报错、环境变量配置无效... 作为一个经历过无数次安装折磨的老手,我决定…...

【电影研究者的AI护城河】:NotebookLM深度定制教程——仅限高校影视实验室内部流传的6大高阶技巧
更多请点击: https://codechina.net 第一章:NotebookLM电影研究辅助的底层逻辑与范式迁移 NotebookLM 并非传统意义上的“AI笔记工具”,而是一个以语义理解为核心、以用户自有资料为知识边界的可验证推理引擎。其在电影研究领域的应用&#…...