计算机视觉之三维重建(7)---多视图几何(下)
文章目录
- 一、透视结构恢复问题
- 1.1 概述
- 1.2 透视结构恢复歧义
- 1.3 代数方法
- 1.4 捆绑调整
- 二、P3P问题
- 三、随机采样一致性
一、透视结构恢复问题
1.1 概述
1. 透视结构恢复问题:摄像机为透视相机,内外参数均未知。
2. 问题:已知 n n n 个三维点 X j X_j Xj 在 m m m 张图像中的对应点的像素坐标为 x i j x_{ij} xij,且 x i j = M i X j x_{ij}=M_iX_j xij=MiXj,其中 M i M_i Mi 为第 i i i 张图片对应的摄像机投影矩阵,求解 n n n 个三维点 X j X_j Xj 的坐标以及 m m m 个摄像机投影矩阵 M i M_i Mi。

1.2 透视结构恢复歧义
1. 透视结构与仿射结构的区别在于,透视结构计算得到的投影矩阵 M i M_i Mi,与真实投影矩阵差一个 4 ∗ 4 4*4 4∗4 的可逆矩阵 H H H,也就是差了一个透视变换关系。

2. 对于给定 m m m 个相机, n n n 个三维点,我们将有 2 m n 2mn 2mn 个等式, 11 m + 3 n − 15 11m+3n-15 11m+3n−15 个未知量。

1.3 代数方法
1. 求解步骤:(1) 求解基础矩阵 F F F (归一化八点法)。 (2) 基于 F F F 估计摄像机矩阵 F → M 1 , M 2 F \rightarrow M_1,M_2 F→M1,M2。 (3) 三角化。
关键是第二步的求解。
2. (1)令 M 1 ∗ = [ I ∣ 0 ] M_1^*=[I|0] M1∗=[I∣0], M 2 ∗ = [ A ∣ b ] M_2^*=[A|b] M2∗=[A∣b]。推导出基础矩阵 F F F 与 A A A 和 b b b 的关系: F = [ b x ] A F=[b_x]A F=[bx]A。注:同方向的向量叉乘为 0 0 0。

(2)如何计算 A A A 和 b b b:

1.4 捆绑调整
1. 捆绑调整(Bundle Adjustment):捆绑调整使用最小化重投影误差,可以进行多次迭代,使重构点足够拟合真实值,可以应用于欧式结构、仿射结构和透视结构多种情况,是一个恢复结构和运动的非线性方法。
2. 代数法与分解法的局限性:(1) 因式分解法:假定所有点都是可见的,所以对于存在遮挡,建立对应点关系失败的情况将不得不删除该对应点关系。 (2) 代数法:应用于 2 2 2 视图重建,多视图容易出现误差累积。
3. 最小化重投影误差: m i n ( E ( M , X ) ) = ∑ i = 1 m ∑ j = 1 n D ( x i j , M i X j ) 2 min(E(M,X))=\sum_{i=1}^m \sum_{j=1}^nD(x_{ij},M_iX_j)^2 min(E(M,X))=∑i=1m∑j=1nD(xij,MiXj)2

4. 捆绑调整的优势:同时处理大量视图,处理丢失的数据。局限性:大量参数的最小化问题,需要良好的初始条件(即初始 M i M_i Mi)。一般来说,捆绑调整作为运动恢复问题的最后一步,首先通过分解或代数方法先求出优化问题的初始 M i M_i Mi。
二、P3P问题
1. (1) PnP 问题:指通过世界中 N N N 个三维点坐标及其在图像中 N N N 个像点坐标,计算出相机或物体位姿的问题。 (2) P3P 问题:我们只讨论世界中 3 3 3 个三维点和图像中 3 3 3 个像点的关系,计算欧式结构恢复相机位姿的问题,也就是计算出摄像机的外参数 R R R、 T T T。 (3) 相比于之前求 F F F 和三角化得到摄像机外参数的方法,该方法误差更小。
2. P3P 问题解法如下所示。其中步骤 1 1 1 的计算方法:由于 a = K [ I 0 ] P a a=K[I \hspace{0.2cm} 0]P_a a=K[I0]Pa,则 K − 1 a = [ I 0 ] P a K^{-1}a=[I \hspace{0.2cm} 0]P_a K−1a=[I0]Pa,所极点到像点 a a a 的方向向量为: o a → = K − 1 a ∣ ∣ K − 1 a ∣ ∣ \overrightarrow{oa}=\frac{K^{-1}a}{||K^{-1}a||} oa=∣∣K−1a∣∣K−1a,同理可以计算出 o b → \overrightarrow{ob} ob 和 o c → \overrightarrow{oc} oc。


三、随机采样一致性
1. 随机采样(Random sample consensus):一种适用于数据受到异常值污染的模型拟合方法,通过选择随机均匀采样一定的点,估计模型参数,并输出模型分数最高的模型。
2. 算法流程:
(1) 随机均匀采样获取模型求解所需的最小子集。
(2) 适用该子集估计模型参数。
(3) 计算剩余样本与当前模型的一致性,统计满足当前模型的内点(在正确拟合模型上的点为内点,负样本点为外点)个数,作为当前模型分数。
(4) 按照设定次数重复(1)-(3)步,最终输出分数最高的模型。

相关文章:
计算机视觉之三维重建(7)---多视图几何(下)
文章目录 一、透视结构恢复问题1.1 概述1.2 透视结构恢复歧义1.3 代数方法1.4 捆绑调整 二、P3P问题三、随机采样一致性 一、透视结构恢复问题 1.1 概述 1. 透视结构恢复问题:摄像机为透视相机,内外参数均未知。 2. 问题:已知 n n n 个三维…...
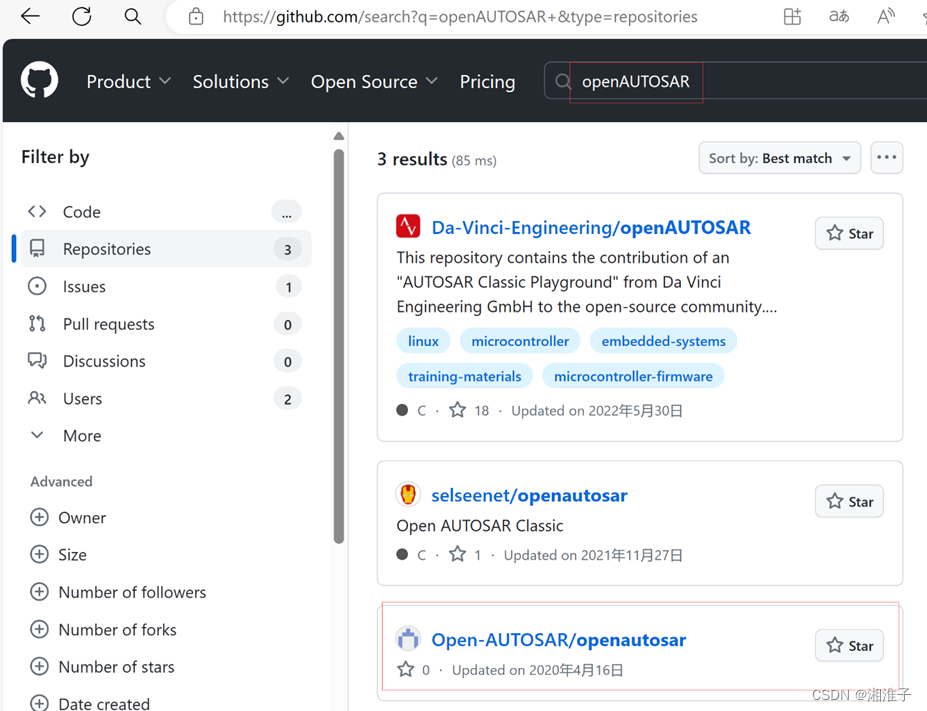
AUTOSAR配置工具开发教程 - 开篇
简介 本系列的教程,主要讲述如何自己开发一套简单的AUTOSAR ECU配置工具。适用于有C# WPF基础的人员。 简易介绍见:如何打造AUTOSAR工具_autosar_mod_ecuconfigurationparameters-CSDN博客 实现版本 AUTOSAR 4.0.3AUTOSAR 4.2.2AUTOSAR 4.4.0 效果 …...
配置VM开机自启动
1. 在此电脑-右键选择“管理”-服务和应用程序-服务中找到VMware Workstation Server服务(新版名称也可能是VMware自启动服务,自己找一下,服务属性里有描述信息的),将其启用并选择开机自动启动 新版参考官方文档&…...
工作的第四天
推荐一个软件分配软件 我们看一下如何使用 连接信息 AOC中国官方网站 发现打开 还是这个页面信息,发现最后出现了页面重新定向的问题 我服了 我的码 怎么解决 我想用这个软件 来看看这个软件下载就可以使用 一听到钱我使用的情绪不是很高了 算了不使用 使用…...

前端开发语言概览:从HTML、CSS到JavaScript
随着互联网的发展,前端开发领域涌现出了许多不同的编程语言和技术,用于构建各种类型的网页和应用程序。本文将介绍几种主流的前端开发语言,包括 HTML、CSS 和 JavaScript,并简要讨论它们在前端开发中的作用和特点。 1. HTML&…...

《Java面试自救指南》(专题二)计算机网络
文章目录 力推的计网神课get请求和post请求的区别在浏览器网址输入一个url后直到浏览器显示页面的过程常用状态码session 和 cookie的区别TCP的三次握手和四次挥手七层OSI模型(TCP/IP协议模型)各种io模型的知识http协议和tcp协议的区别https和http的区别…...
)
Android14音频进阶之<进阶调试>:Perfetto定位系统音频问题(六十六)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒体系统工程师系列【原创干货持续更新中……】🚀 优质视频课程:AAOS车载系统+AOSP…...
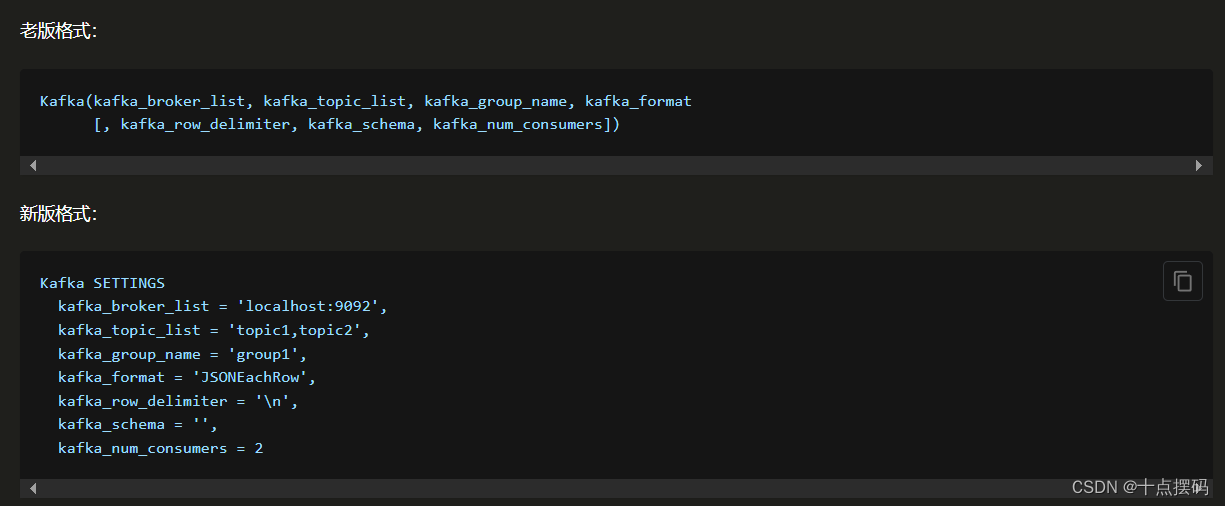
使用 Clickhouse 集成的表引擎同步数据方式详解
Clickhouse作为一个列式存储分析型数据库,提供了很多集成其他组件的表引擎数据同步方案。 官网介绍 一 Kafka 表引擎 使用Clickhouse集成的Kafka表引擎消费Kafka写入Clickhouse表中。 1.1 流程图 1.2 建表 根据上面的流程图需要建立三张表,分别Click…...
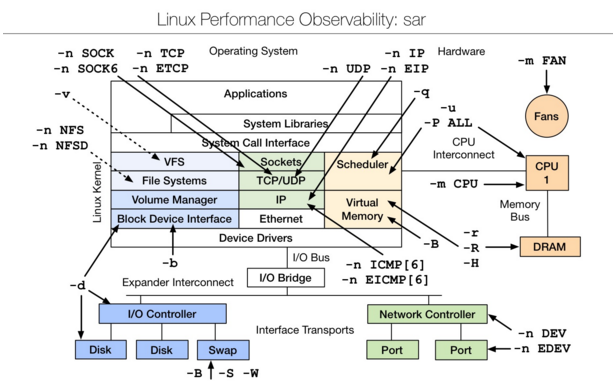
Linux 性能分析工具大全
vmstat--虚拟内存统计 vmstat(VirtualMeomoryStatistics,虚拟内存统计)是 Linux 中监控内存的常用工具,可对操作系统的虚拟内存、进程、CPU 等的整体情况进行监视。vmstat 的常规用法:vmstat interval times 即每隔 interval 秒采…...

FME学习之旅---day21
我们付出一些成本,时间的或者其他,最终总能收获一些什么。 教程:AutoCAD 变换 相关的文章 为您的 DWG 赋予一些样式:使用 DWGStyler、模板文件、块等 FME数据检查器在显示行的方式上受到限制。它只能显示线条颜色,而…...
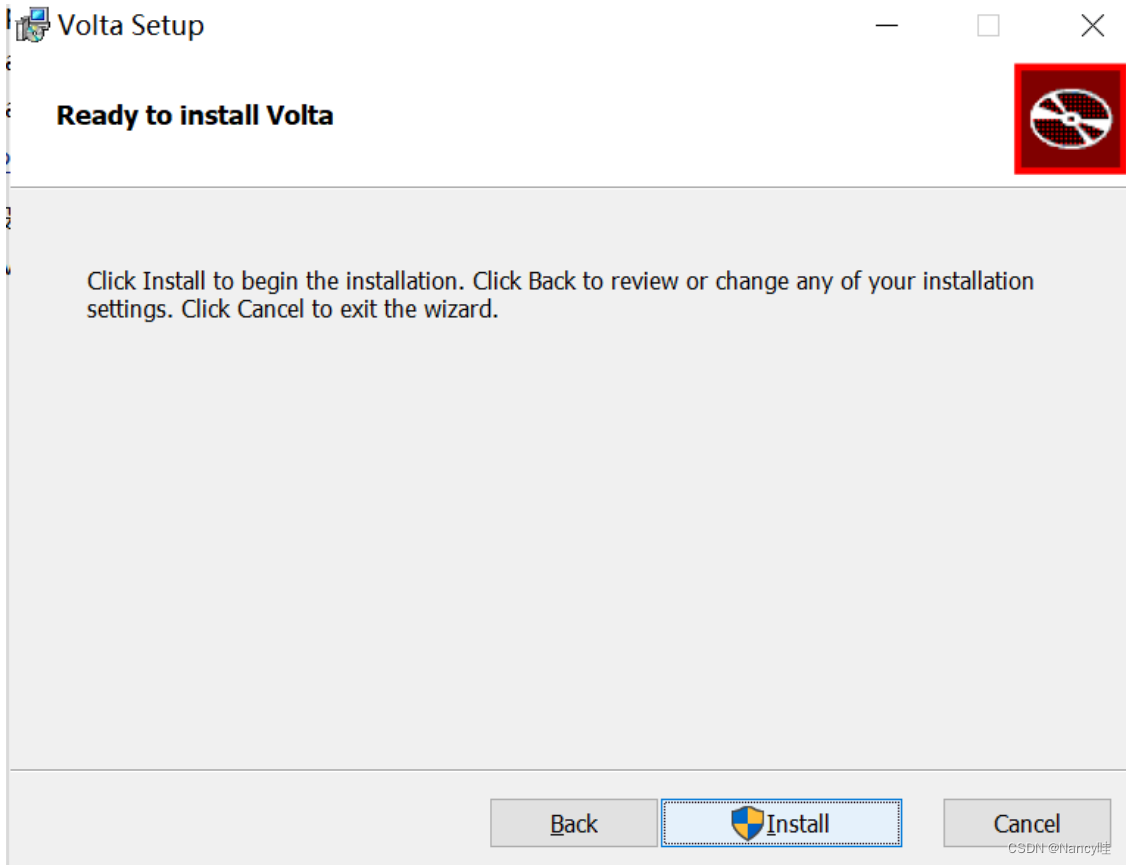
volta(轻松切换管理Node.js版本)
Node.js版本管理 Volta提供了一个简单直观的命令行界面,可以轻松地安装、卸载、更新和切换Node.js版本。 Volta 既可以全局使用,也可以在项目级别使用,可以为每个项目单独设置node版本,nvm不行。 下载安装Volta 参考: …...
机器学习知识点
1鸢尾花分类 鸢尾花分类问题是一个经典的机器学习问题,旨在根据鸢尾花的花萼长度、花萼宽度、花瓣长度和花瓣宽度等特征,将鸢尾花分成三个品种:山鸢尾(setosa)、变色鸢尾(versicolor)和维吉尼亚…...

SQL注入利用学习-Union联合注入
联合注入的原理 在SQL语句中查询数据时,使用select 相关语句与where 条件子句筛选符合条件的记录。 select * from person where id 1; #在person表中,筛选出id1的记录如果该id1 中的1 是用户可以控制输入的部分时,就有可能存在SQL注入漏洞…...

zookeeper源码(12)命令行客户端
zkCli.sh脚本 这个命令行脚本在bin目录下: ZOOBIN"${BASH_SOURCE-$0}" ZOOBIN"$(dirname "${ZOOBIN}")" ZOOBINDIR"$(cd "${ZOOBIN}"; pwd)"# 加载zkEnv.sh脚本 if [ -e "$ZOOBIN/../libexec/zkEnv.sh&qu…...
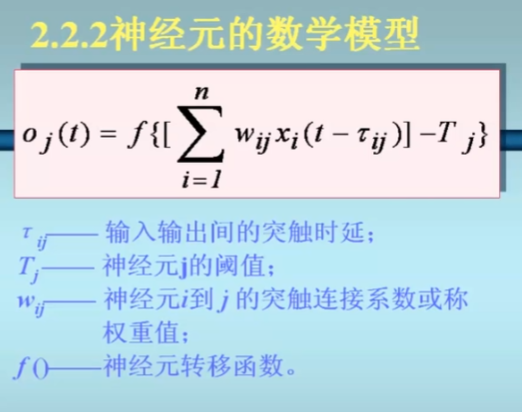
深度学习的数学基础--Homework2
学习资料:https://www.bilibili.com/video/BV1mg4y187qv/?spm_id_from333.788.recommend_more_video.1&vd_sourced6b1de7f052664abab680fc242ef9bc1 神经网络的特点:它不是一个解析模型,它的储存在一堆参数里面(确定一个超平…...

什么是HW,企业如何进行HW保障?
文章目录 一、什么是HW二、HW行动具体采取了哪些攻防演练措施三、攻击方一般的攻击流程和方法四、企业HW保障方案1.建意识2.摸家底3.固城池4.配神器5.增值守 一、什么是HW 网络安全形势近年出现新变化,网络安全态势变得越来越复杂,黑客攻击入侵、勒索病…...

【Redis系列】Spring Boot 集成 Redis 实现缓存功能
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
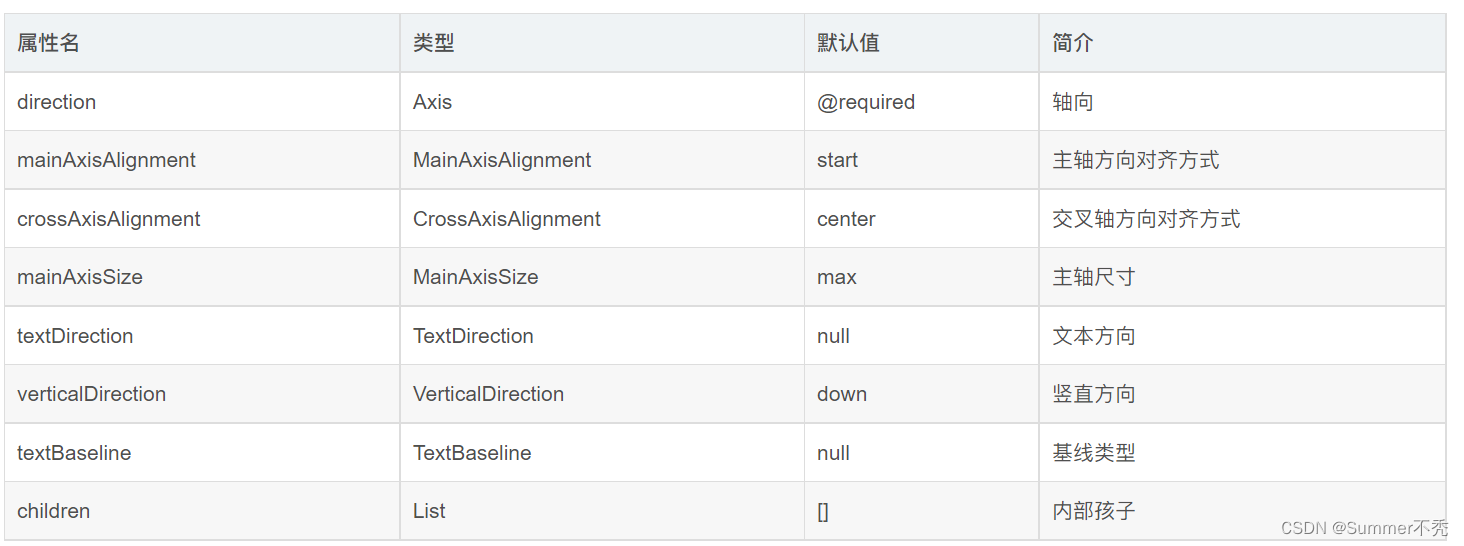
Flutter之Flex组件布局
目录 Flex属性值 轴向:direction:Axis.horizontal 主轴方向:mainAxisAlignment:MainAxisAlignment.center 交叉轴方向:crossAxisAlignment:CrossAxisAlignment 主轴尺寸:mainAxisSize 文字方向:textDirection:TextDirection 竖直方向排序:verticalDirection:VerticalDir…...
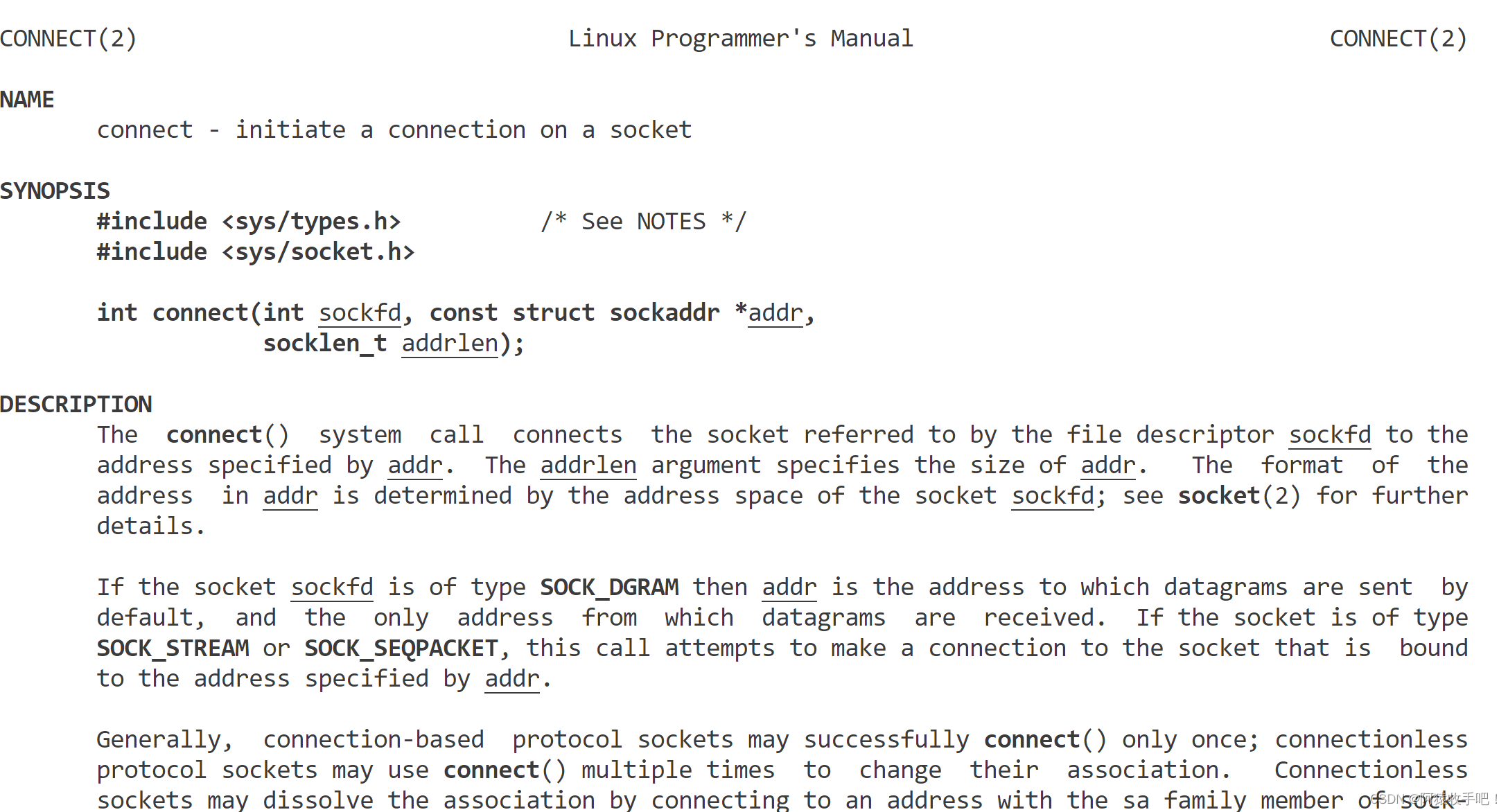
【Linux】TCP编程{socket/listen/accept/telnet/connect/send}
文章目录 1.TCP接口1.1socket文档 1.2listen拓:端口号8080 1.3accept拓:今天全局函数 1.4读写接口1.5telnet1.一个客户端2.两个客户端 1.6ulimit -a1.7常识回顾1.8connect1.9拓:客户端的ip和地址什么时候被分配?1.10拓:…...

【WPF应用33】WPF基本控件-TabControl的详解与示例
在Windows Presentation Foundation(WPF)中,TabControl控件是一个强大的界面元素,它允许用户在多个标签页之间切换,每个标签页都可以显示不同的内容。这种控件在组织信息、提供选项卡式界面等方面非常有用。在本篇博客…...

WinFlexBison:构建高性能Windows平台词法语法分析器的专业解决方案
WinFlexBison:构建高性能Windows平台词法语法分析器的专业解决方案 【免费下载链接】winflexbison Main winflexbision repository 项目地址: https://gitcode.com/gh_mirrors/wi/winflexbison 在Windows平台开发编译器、解释器或复杂配置文件解析器时&#…...

掌握ComfyUI视频处理:5步构建高效AI视频工作流
掌握ComfyUI视频处理:5步构建高效AI视频工作流 【免费下载链接】ComfyUI-VideoHelperSuite Nodes related to video workflows 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-VideoHelperSuite 在AI视频创作和内容制作领域,ComfyUI-Video…...

SoC与SoM:硬件开发的效率革命与双刃剑效应
1. 项目概述:当“系统”成为商品从业十几年,从画第一块51单片机的板子,到参与设计复杂的通信基站,我亲眼见证了硬件开发模式的剧变。如果说早些年我们还在为如何把CPU、内存、Flash、各种接口控制器塞进一块PCB而绞尽脑汁…...
)
保姆级避坑指南:在Ubuntu 18.04上从零搭建PX4仿真环境(ROS Melodic + Gazebo 9)
从零避坑:Ubuntu 18.04下PX4仿真环境全链路搭建实战 当无人机开发者第一次接触PX4生态时,往往会被复杂的工具链和隐蔽的环境依赖所困扰。本文将以"问题驱动"的方式,拆解ROS Melodic Gazebo 9 PX4组合环境搭建中的12个典型陷阱&am…...

HiveWE魔兽地图编辑器:5分钟快速上手指南,告别卡顿创作新时代
HiveWE魔兽地图编辑器:5分钟快速上手指南,告别卡顿创作新时代 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为《魔兽争霸III》原版地图编辑器缓慢的加载速度和繁琐的操作而烦恼…...

独立开发者如何利用Taotoken的Token Plan有效控制项目预算
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken的Token Plan有效控制项目预算 对于独立开发者或小型团队而言,在构建AI应用时,…...

智慧巡检-基于Yolo26的目标检测系统 带登录界面的基于Yolo26的目标检测系统完整源码+原始ui文件+环境配置教程 相关技术文档包含:2万字算法文档+详细操作指南+技术设计文档+流程图+yolo
智慧巡检-基于Yolo26的目标检测系统带登录界面的基于Yolo26的目标检测系统完整源码原始ui文件环境配置教程 相关技术文档包含:2万字算法文档详细操作指南技术设计文档流程图yolo26网络结构图各文件作用说明 可视化界面基于pyside6,数据库为sqlite3&#…...

高效检索句子:基于 SQLite FTS5 的关键词快速匹配方案
std::filesystem::replace_extension 仅修改路径对象的逻辑表示,不更改磁盘文件;真正改后缀需配合 fs::rename,且须检查目标是否存在、文件是否为常规文件,并注意跨卷、文件占用等系统限制。std::filesystem::replace_extension 为…...

第08章 FastAPI 与 SSE 流式 RAG 后端
第08章 FastAPI 与 SSE 流式 RAG 后端 到目前为止,知识库、检索工具、MCP 客户端都已经就绪,但仍缺少一个面向最终用户的入口。本章用 FastAPI 把整条 RAG 链路串起来:接收前端发来的自然语言问题,调用 MCP 工具检索相关工单&…...

HS2-HF Patch:为《Honey Select 2》注入新生命的魔法补丁
HS2-HF Patch:为《Honey Select 2》注入新生命的魔法补丁 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 你是不是曾经打开《Honey Select 2》时&am…...