STM32无刷电机全套开发资料(源码、原理图、PCB工程及说明文档)
目录
1、原理图、PCB、BOOM表
2、设计描述
2.1 前言
2.2 设计电路规范
3、代码
4、资料清单
资料下载地址:STM32无刷电机全套开发资料(源码、原理图、PCB工程及说明文档)
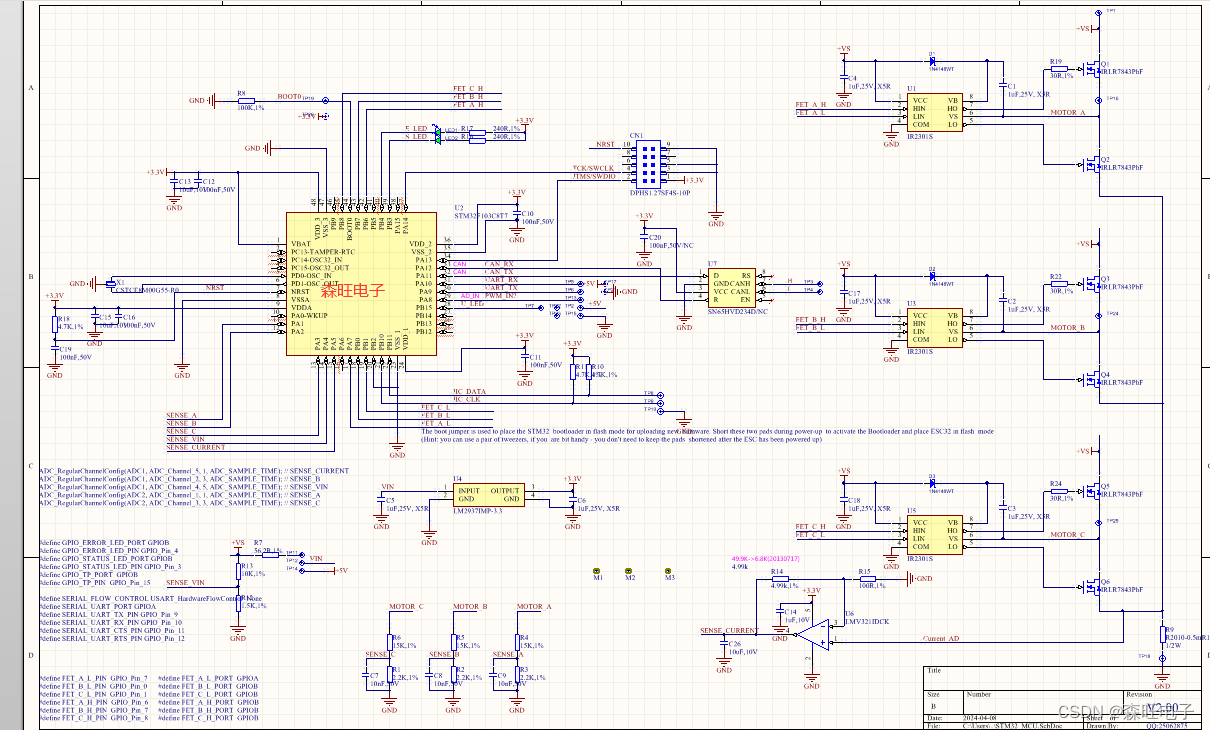
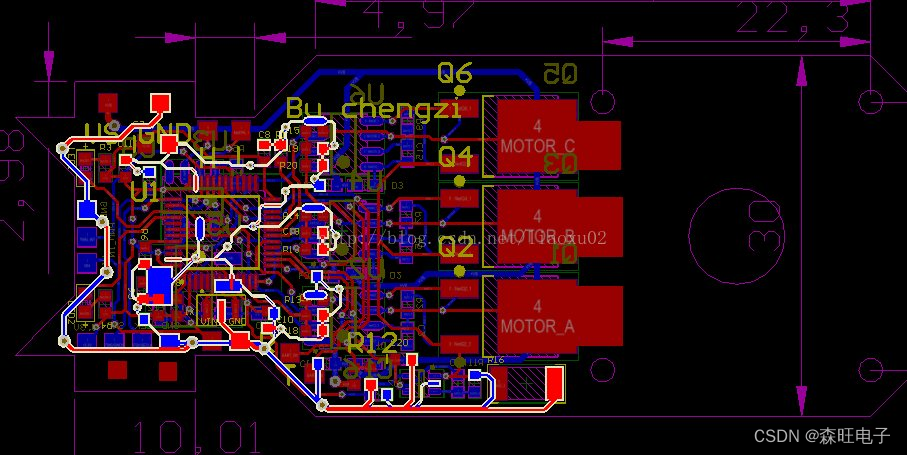
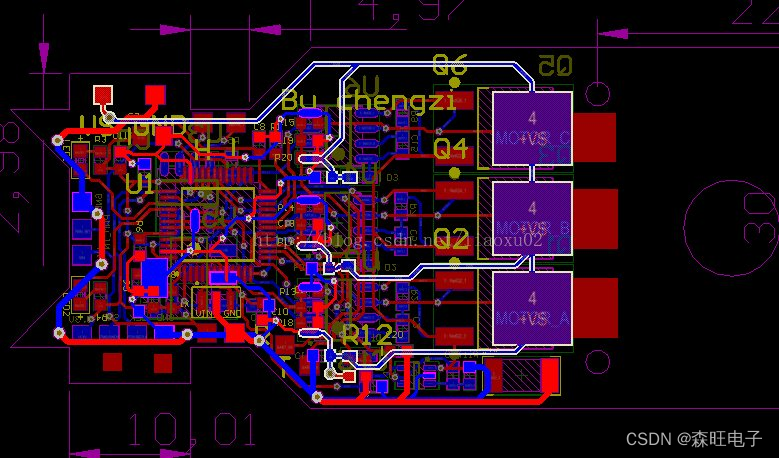
1、原理图、PCB、BOOM表


2、设计描述
2.1 前言
经过一个星期的画PCB,今天终于化了,整体看上去还比较满意,具体的性能基本满足需求
2.2 设计电路规范
1、线间距。
这里应该遵循3W规则,所谓3W就是为了减少线间串扰,应保证线间距足够大,当线中心不少于3倍线宽,则可 保持70%的电场不互相干扰。如要达到98%的电场不互相干扰,可使用10W的间距。——这是查阅华为PCB布线规则所得。
2、电源线过细。
这里我查阅了华为PCB教程得到了下面一个表格。这里线宽跟所能承受最大电流的关系表
 3、电源环路。(用图说明)
3、电源环路。(用图说明)
3、代码
/*This file is part of AutoQuad ESC32.AutoQuad ESC32 is free software: you can redistribute it and/or modifyit under the terms of the GNU General Public License as published bythe Free Software Foundation, either version 3 of the License, or(at your option) any later version.AutoQuad ESC32 is distributed in the hope that it will be useful,but WITHOUT ANY WARRANTY; without even the implied warranty ofMERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See theGNU General Public License for more details.You should have received a copy of the GNU General Public Licensealong with AutoQuad ESC32. If not, seeCopyright © 2011, 2012, 2013 Bill Nesbitt
*/#include "run.h"
#include "main.h"
#include "timer.h"
#include "adc.h"
#include "fet.h"
#include "pwm.h"
#include "cli.h"
#include "binary.h"
#include "config.h"
#include "misc.h"
#include "stm32f10x_exti.h"
#include "stm32f10x_pwr.h"
#include "stm32f10x_iwdg.h"
#include "stm32f10x_dbgmcu.h"
#include <math.h>uint32_t runMilis; //systick中断中自加.没有什么控制用途
static uint32_t oldIdleCounter; //上次main函数中,死循环次数.
float idlePercent; //空闲时间百分比(在main循环里,什么事情也不做.main死循环运行的时间)
float avgAmps, maxAmps; //平均电流, 最大电流
float avgVolts; //当前ADC采集转换后的电池电压(也就是12v)float rpm; //当前转速(1分钟多少转) 测量值 在runRpm函数中计算出来.在runThrotLim中还要继续使用.
float targetRpm; //目标转速 设定值(只在闭环 或 闭环推力模式下使用此变量)static float rpmI;
static float runRPMFactor;
static float maxCurrentSQRT; //最大电流 平方根 后
uint8_t disarmReason;//此变量没啥作用.只用于给上位机显示当前的 调试代码(或者说停止电机的原因)
uint8_t commandMode; //串口通讯的模式, cli是ascii模式, binary是二进制通讯模式
static uint8_t runArmCount;
volatile uint8_t runMode;//运行模式 (开环模式, RPM模式, 推力模式, 伺服模式)
static float maxThrust;//执行看门狗喂狗
void runFeedIWDG(void) {
#ifdef RUN_ENABLE_IWDGIWDG_ReloadCounter();
#endif
}// setup the hardware independent watchdog
// 初始化并开启独立看门狗
uint16_t runIWDGInit(int ms)
{
#ifndef RUN_ENABLE_IWDGreturn 0;
#elseuint16_t prevReloadVal;int reloadVal;IWDG_ReloadCounter();//喂狗DBGMCU_Config(DBGMCU_IWDG_STOP, ENABLE);//当在jtag调试的时候.停止看门狗// IWDG timeout equal to 10 ms (the timeout may varies due to LSI frequency dispersion)// Enable write access to IWDG_PR and IWDG_RLR registersIWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);//允许访问IWDG_PR和IWDG_RLR寄存器// IWDG counter clock: LSI/4IWDG_SetPrescaler(IWDG_Prescaler_4);// Set counter reload value to obtain 10ms IWDG TimeOut.// Counter Reload Value = 10ms/IWDG counter clock period// = 10ms / (RUN_LSI_FREQ/4)// = 0.01s / (RUN_LSI_FREQ/4)// = RUN_LSI_FREQ/(4 * 100)// = RUN_LSI_FREQ/400reloadVal = RUN_LSI_FREQ*ms/4000;if (reloadVal < 1)reloadVal = 1;else if (reloadVal > 0xfff)reloadVal = 0xfff;prevReloadVal = IWDG->RLR;IWDG_SetReload(reloadVal);// Reload IWDG counterIWDG_ReloadCounter();// Enable IWDG (the LSI oscillator will be enabled by hardware)IWDG_Enable();return (prevReloadVal*4000/RUN_LSI_FREQ);
#endif
}//esc32 非正常停止运行 进入初始化
void runDisarm(int reason) {fetSetDutyCycle(0); //fet占空比设置为0timerCancelAlarm2();state = ESC_STATE_DISARMED;pwmIsrAllOn();digitalHi(statusLed); // turn offdigitalLo(errorLed); // turn ondisarmReason = reason; // 设置停机原因.给上位机查看状态使用
}//手动运行
void runArm(void) {int i;fetSetDutyCycle(0);timerCancelAlarm2();digitalHi(errorLed);digitalLo(statusLed); // turn onif (runMode == SERVO_MODE) {state = ESC_STATE_RUNNING;}else {state = ESC_STATE_STOPPED;if (inputMode == ESC_INPUT_UART)runMode = OPEN_LOOP;fetSetBraking(0);}// extra beeps signifying run modefor (i = 0; i < runMode + 1; i++) {fetBeep(250, 600);timerDelay(10000);}// fetBeep(150, 800);
}//电机开始运行
void runStart(void) {// reset integral bevore new motor startuprunRpmPIDReset();//先复位I值if ((p[START_ALIGN_TIME] == 0) && (p[START_STEPS_NUM] == 0)) {state = ESC_STATE_STARTING; //设置为准备启动状态fetStartCommutation(0);//换向启动}else {motorStartSeqInit();//普通启动}
}//电机停止运行
void runStop(void) {runMode = OPEN_LOOP;fetSetDutyCycle(0);
}//设置运行的占空比 duty = 0~100
uint8_t runDuty(float duty) {uint8_t ret = 0;if (duty >= 0.0f || duty <= 100.0f) {runMode = OPEN_LOOP;fetSetBraking(0);fetSetDutyCycle((uint16_t)(fetPeriod*duty*0.01f));//最大周期 * 占空比(0~100) / 100ret = 1;}return ret;
}//pwm.c中断中调用 或 串口命令输入调用
void runNewInput(uint16_t setpoint) {static uint16_t lastPwm;static float filteredSetpoint = 0;// Lowpass Input if configured// TODO: Make lowpass independent from pwm update rateif (p[PWM_LOWPASS]) {filteredSetpoint = (p[PWM_LOWPASS] * filteredSetpoint + (float)setpoint) / (1.0f + p[PWM_LOWPASS]);setpoint = filteredSetpoint;}if (state == ESC_STATE_RUNNING && setpoint != lastPwm){if (runMode == OPEN_LOOP){//开环模式fetSetDutyCycle(fetPeriod * (int32_t)(setpoint-pwmLoValue) / (int32_t)(pwmHiValue - pwmLoValue));}else if (runMode == CLOSED_LOOP_RPM){//闭环转速模式float target = p[PWM_RPM_SCALE] * (setpoint-pwmLoValue) / (pwmHiValue - pwmLoValue);// limit to configured maximumtargetRpm = (target > p[PWM_RPM_SCALE]) ? p[PWM_RPM_SCALE] : target;}// THRUST Modeelse if (runMode == CLOSED_LOOP_THRUST){//闭环推力模式float targetThrust; // desired trustfloat target; // target(rpm)// Calculate targetThrust based on input and MAX_THRUSTtargetThrust = maxThrust * (setpoint-pwmLoValue) / (pwmHiValue - pwmLoValue);// Workaraound: Negative targetThrust will screw up sqrtf() and create MAX_RPM on throttle min. Dangerous!if (targetThrust > 0.0f) {// Calculate target(rpm) based on targetThrusttarget = ((sqrtf(p[THR1TERM] * p[THR1TERM] + 4.0f * p[THR2TERM] * targetThrust) - p[THR1TERM] ) / ( 2.0f * p[THR2TERM] ));}// targetThrust is negative (pwm_in < pwmLoValue)else {target = 0.0f;}// upper limit for targetRpm is configured maximum PWM_RPM_SCALE (which is MAX_RPM)targetRpm = (target > p[PWM_RPM_SCALE]) ? p[PWM_RPM_SCALE] : target;}else if (runMode == SERVO_MODE){//伺服模式下fetSetAngleFromPwm(setpoint);}lastPwm = setpoint;}else if ((state == ESC_STATE_NOCOMM || state == ESC_STATE_STARTING) && setpoint <= pwmLoValue){fetSetDutyCycle(0);state = ESC_STATE_RUNNING;}else if (state == ESC_STATE_DISARMED && setpoint > pwmMinValue && setpoint <= pwmLoValue){runArmCount++;if (runArmCount > RUN_ARM_COUNT)runArm();}else {runArmCount = 0;}if (state == ESC_STATE_STOPPED && setpoint >= pwmMinStart) {//电机开始运行runStart();}
}//电调运行看门狗. 主要是判断电调的当前一些状态.做出停机等处理
static void runWatchDog(void)
{register uint32_t t, d, p;//__asm volatile ("cpsid i");//CPSID_I();__disable_irq();t = timerMicros; //当前的系统tick时间d = detectedCrossing;p = pwmValidMicros; //在PWM输入模式下.把timerMicros的时间赋值给此变量//__asm volatile ("cpsie i");//CPSIE_I();__enable_irq();if (state == ESC_STATE_STARTING && fetGoodDetects > fetStartDetects) //这里要检测到fetStartDetects好的检测,才允许切换电机状态{//是启动状态.切换到 运行状态state = ESC_STATE_RUNNING;digitalHi(statusLed); // turn off}else if (state >= ESC_STATE_STOPPED){//运行模式状态下.会一直在这里检测状态.如果状态不对出错.会调用runDisarm函数停止// running or startingd = (t >= d) ? (t - d) : (TIMER_MASK - d + t);// timeout if PWM signal disappearsif (inputMode == ESC_INPUT_PWM){//PWM模式 判断PWM输入是否超时p = (t >= p) ? (t - p) : (TIMER_MASK - p + t);if (p > PWM_TIMEOUT)runDisarm(REASON_PWM_TIMEOUT);//pwm输入超时}if (state >= ESC_STATE_STARTING && d > ADC_CROSSING_TIMEOUT){if (fetDutyCycle > 0) {runDisarm(REASON_CROSSING_TIMEOUT);//错误停止}else{runArm();//手动运行起来pwmIsrRunOn();//PWM开启输入比较}}else if (state >= ESC_STATE_STARTING && fetBadDetects > fetDisarmDetects) //运行状态中 检测到错误的个数后.进入这个判断{//在运行过程中,出现错误.停止运行if (fetDutyCycle > 0)runDisarm(REASON_BAD_DETECTS);//错误停止}else if (state == ESC_STATE_STOPPED){//停止模式adcAmpsOffset = adcAvgAmps; // record current amperage offset}}else if (state == ESC_STATE_DISARMED && !(runMilis % 100)){//停止模式下adcAmpsOffset = adcAvgAmps; // record current amperage offsetdigitalTogg(errorLed);}
}void runRpmPIDReset(void) {rpmI = 0.0f;
}//这个应该是计算PID
//rpm:测量的转速值
//target:目标的转速值
static int32_t runRpmPID(float rpm, float target) {float error;float ff, rpmP;float iTerm = rpmI;float output;// feed forwardff = ((target*target* p[FF1TERM] + target*p[FF2TERM]) / avgVolts) * fetPeriod;error = (target - rpm);//计算出偏差if (error > 1000.0f)error = 1000.0f;if (error > 0.0f) {rpmP = error * p[PTERM]; //PrpmI += error * p[ITERM]; //I}else {rpmP = error * p[PTERM] * p[PNFAC];rpmI += error * p[ITERM] * p[INFAC];}if (fetBrakingEnabled){//开启了制动模式if (rpm < 300.0f) {fetSetBraking(0);}else if (error <= -100.0f) {fetSetBraking(1);}else if (fetBraking && error > -25.0f){fetSetBraking(0);}}output = ff + (rpmP + rpmI) * (1.0f / 1500.0f) * fetPeriod;// don't allow integral to continue to rise if at max outputif (output >= fetPeriod)rpmI = iTerm;return output;
}//计算出电机转速,根据当前转速计算出PID输出值,设置占空比
static uint8_t runRpm(void)
{if (state > ESC_STATE_STARTING){//电机处于运行状态 计算出当前转速rpm// rpm = rpm * 0.90f + (runRPMFactor / (float)crossingPeriod) * 0.10f;// rpm -= (rpm - (runRPMFactor / (float)crossingPeriod)) * 0.25f;// rpm = (rpm + (runRPMFactor / (float)crossingPeriod)) * 0.5f;// rpm = (rpm + ((32768.0f * runRPMFactor) / (float)adcCrossingPeriod)) * 0.5f; // increased resolution, fixed filter hererpm = p[RPM_MEAS_LP] * rpm + ((32768.0f * runRPMFactor) / (float)adcCrossingPeriod) * (1.0f - p[RPM_MEAS_LP]); // increased resolution, variable filter here// run closed loop controlif (runMode == CLOSED_LOOP_RPM){//运行在闭环模式下fetSetDutyCycle(runRpmPID(rpm, targetRpm));return 1;}// run closed loop control also for THRUST modeelse if (runMode == CLOSED_LOOP_THRUST){//运行在闭环推力模式fetSetDutyCycle(runRpmPID(rpm, targetRpm));return 1;}else{return 0;}}else{//电机在停止状态下rpm = 0.0f;return 0;}
}static void runSetupPVD(void) {EXTI_InitTypeDef EXTI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;// Configure EXTI Line16(PVD Output) to generate an interrupt on rising and falling edgesEXTI_ClearITPendingBit(EXTI_Line16);EXTI_InitStructure.EXTI_Line = EXTI_Line16;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);// Enable the PVD InterruptNVIC_InitStructure.NVIC_IRQChannel = PVD_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);// Configure the PVD Level to 2.2VPWR_PVDLevelConfig(PWR_PVDLevel_2V2);//配置pvd电压等级.当电压小于2.2V的时候产生中断// Enable the PVD OutputPWR_PVDCmd(ENABLE);
}void runInit(void) {runSetupPVD();runSetConstants();runMode = p[STARTUP_MODE];//启动 运行模式//系统tickcount时钟SysTick_Config(SystemCoreClock / 1000); // 1msNVIC_SetPriority(SysTick_IRQn, 2); // lower priority// setup hardware watchdogrunIWDGInit(20);
}#define RUN_CURRENT_ITERM 1.0f
#define RUN_CURRENT_PTERM 10.0f
#define RUN_MAX_DUTY_INCREASE 1.0ffloat currentIState;//根据PID计算出PWM占空比的值
static int32_t runCurrentPID(int32_t duty) {float error;float pTerm, iTerm;error = avgAmps - p[MAX_CURRENT];currentIState += error;if (currentIState < 0.0f)currentIState = 0.0f;iTerm = currentIState * RUN_CURRENT_ITERM;pTerm = error * RUN_CURRENT_PTERM;if (pTerm < 0.0f)pTerm = 0.0f;duty = duty - iTerm - pTerm;if (duty < 0)duty = 0;return duty;
}//计算得到实际的占空比fetActualDutyCycle
//参数duty:实际上就是fetDutyCycle传递进来的.想要运行的周期
static void runThrotLim(int32_t duty)
{float maxVolts; //最大的电压int32_t maxDuty;//最大的周期// only if a limit is setif (p[MAX_CURRENT] > 0.0f){//如果实际的占空比和设置的占空比不一样.那么会实时改变CPU的PWM寄存器.// if current limiter is calibrated - best performance 使用电流限制器校准.性能最好if (p[CL1TERM] != 0.0f){maxVolts = p[CL1TERM] + p[CL2TERM]*rpm + p[CL3TERM]*p[MAX_CURRENT] + p[CL4TERM]*rpm*maxCurrentSQRT + p[CL5TERM]*maxCurrentSQRT;maxDuty = maxVolts * (fetPeriod / avgVolts);if (duty > maxDuty)fetActualDutyCycle = maxDuty;elsefetActualDutyCycle = duty;}// otherwise, use PID - less accurate, lower performance 使用PID来计算.不大准确.性能低else{fetActualDutyCycle += fetPeriod * (RUN_MAX_DUTY_INCREASE * 0.01f);if (fetActualDutyCycle > duty)fetActualDutyCycle = duty;fetActualDutyCycle = runCurrentPID(fetActualDutyCycle);//用PID来计算出当前要运行的占空比}}else {fetActualDutyCycle = duty;}//设置到CPU寄存器里.算出来的实际PWM占空比_fetSetDutyCycle(fetActualDutyCycle);
}//系统tickcount中断
void SysTick_Handler(void) {// reload the hardware watchdogrunFeedIWDG();avgVolts = adcAvgVolts * ADC_TO_VOLTS; //转换后的电池电压(一般是12V) = ADC采集电压原始值 * 电压算法avgAmps = (adcAvgAmps - adcAmpsOffset) * adcToAmps; //平均电流 = (当前电流 - 停止时候的电流) * 转换公式maxAmps = (adcMaxAmps - adcAmpsOffset) * adcToAmps; //最大电流 = (最大电流 - 停止时候的电流) * 转换公式if (runMode == SERVO_MODE){//伺服模式fetUpdateServo();}else{runWatchDog();//检测电调的状态.做出相应的停机处理runRpm(); //计算RPM,计算PID,设置运行PWM占空比runThrotLim(fetDutyCycle);//计算得到实际PWM占空比.如果有偏差.那么在这里会实时改变PWM的占空比值}//计算空闲时间百分比 通过串口发送给上位机 没什么用途idlePercent = 100.0f * (idleCounter-oldIdleCounter) * minCycles / totalCycles;
// 空闲时间百分比 = 100 * (本次循环次数 - 上次循环次数) * 最小周期 / 总共周期oldIdleCounter = idleCounter;totalCycles = 0;//处理串口数据 和串口交互使用的if (commandMode == CLI_MODE)cliCheck(); //ascii模式elsebinaryCheck(); //二进制模式runMilis++;
}//低电压中断
void PVD_IRQHandler(void) {// voltage dropping too lowif (EXTI_GetITStatus(EXTI_Line16) != RESET) {// shut everything downrunDisarm(REASON_LOW_VOLTAGE);// turn on both LEDsdigitalLo(statusLed);digitalLo(errorLed);EXTI_ClearITPendingBit(EXTI_Line16);}
}void runSetConstants(void) {int32_t startupMode = (int)p[STARTUP_MODE];float maxCurrent = p[MAX_CURRENT];//运行模式if (startupMode < 0 || startupMode >= NUM_RUN_MODES)startupMode = 0;if (maxCurrent > RUN_MAX_MAX_CURRENT)maxCurrent = RUN_MAX_MAX_CURRENT;else if (maxCurrent < RUN_MIN_MAX_CURRENT)maxCurrent = RUN_MIN_MAX_CURRENT;runRPMFactor = (1e6f * (float)TIMER_MULT * 120.0f) / (p[MOTOR_POLES] * 6.0f);maxCurrentSQRT = sqrtf(maxCurrent);p[MOTOR_POLES] = (int)p[MOTOR_POLES];p[STARTUP_MODE] = startupMode;p[MAX_CURRENT] = maxCurrent;// Calculate MAX_THRUST from PWM_RPM_SCALE (which is MAX_RPM) and THRxTERMs// Based on "thrust = rpm * a1 + rpm^2 * a2"maxThrust = p[PWM_RPM_SCALE] * p[THR1TERM] + p[PWM_RPM_SCALE] * p[PWM_RPM_SCALE] * p[THR2TERM];
}
4、资料清单
相关文章:
STM32无刷电机全套开发资料(源码、原理图、PCB工程及说明文档)
目录 1、原理图、PCB、BOOM表 2、设计描述 2.1 前言 2.2 设计电路规范 3、代码 4、资料清单 资料下载地址:STM32无刷电机全套开发资料(源码、原理图、PCB工程及说明文档) 1、原理图、PCB、BOOM表 2、设计描述 2.1 前言 经过一个星期的画PCB,今…...

工地安全监测识别摄像机
工地安全监测识别摄像机是一种在建筑工地和施工现场广泛使用的智能监控设备,主要用于监测施工过程中可能出现的安全隐患和违规行为,以确保工地人员和设备的安全。通过高清摄像头、智能算法和远程监控系统的结合,该摄像机可以实时监测工地各个…...
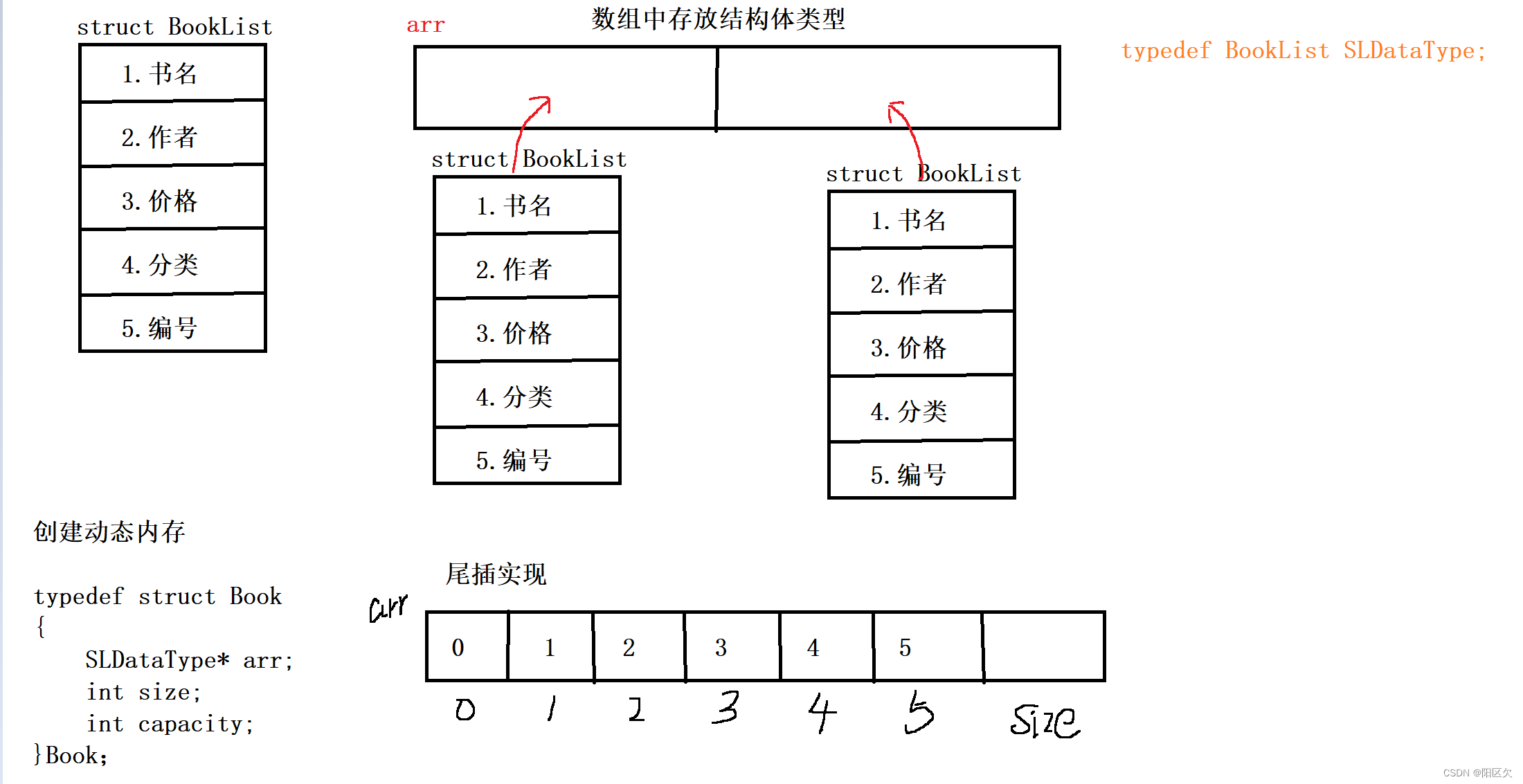
【零基础学数据结构】顺序表实现书籍存储
目录 书籍存储的实现规划 编辑 前置准备: 书籍结构体: 书籍展示的初始化和文件加载 书籍展示的销毁和文件保存 书籍展示的容量检查 书籍展示的尾插实现 书籍展示的书籍增加 书籍展示的书籍打印 书籍删除展示数据 书籍展示修改数据 在指定位置之前…...
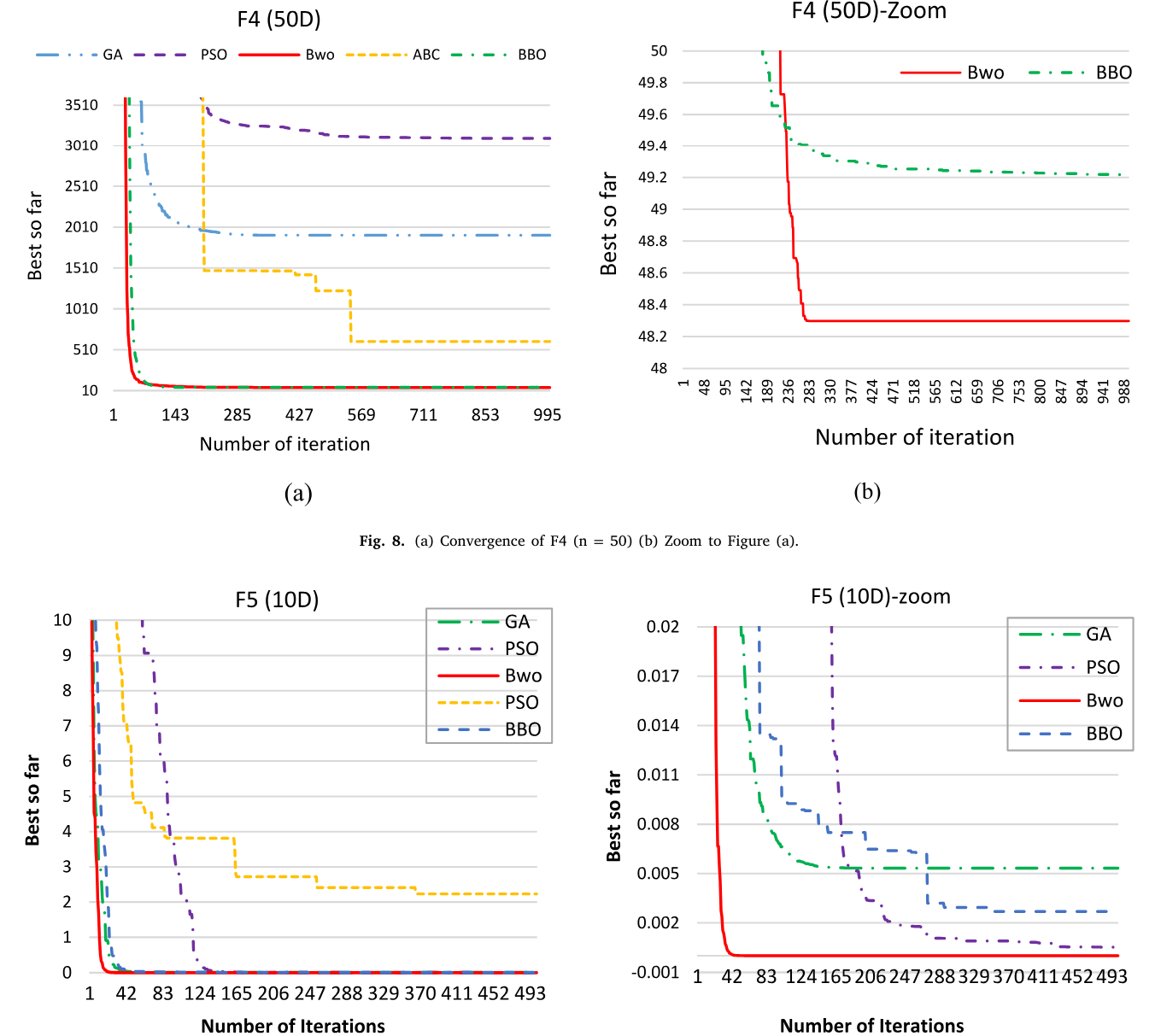
【智能算法】黑寡妇优化算法(BWO)原理及实现
目录 1.背景2.算法原理2.1算法思想2.2算法过程 3.结果展示4.参考文献 1.背景 2020年,V Hayyolalam等人受到自然界黑寡妇交配行为启发,提出了黑寡妇优化算法(Black Widow Optimization Agorithm, BWO)。 2.算法原理 2.1算法思想…...

C#-非托管代码
非托管代码是指不受.NET运行时(CLR)的管理和控制,而是直接由操作系统或其他本机执行环境(如C/C编译的代码)所执行的代码。以下是一些常见的非托管代码的例子: C/C代码:通过使用C或C等编程语言编…...

计算机视觉之三维重建(7)---多视图几何(下)
文章目录 一、透视结构恢复问题1.1 概述1.2 透视结构恢复歧义1.3 代数方法1.4 捆绑调整 二、P3P问题三、随机采样一致性 一、透视结构恢复问题 1.1 概述 1. 透视结构恢复问题:摄像机为透视相机,内外参数均未知。 2. 问题:已知 n n n 个三维…...
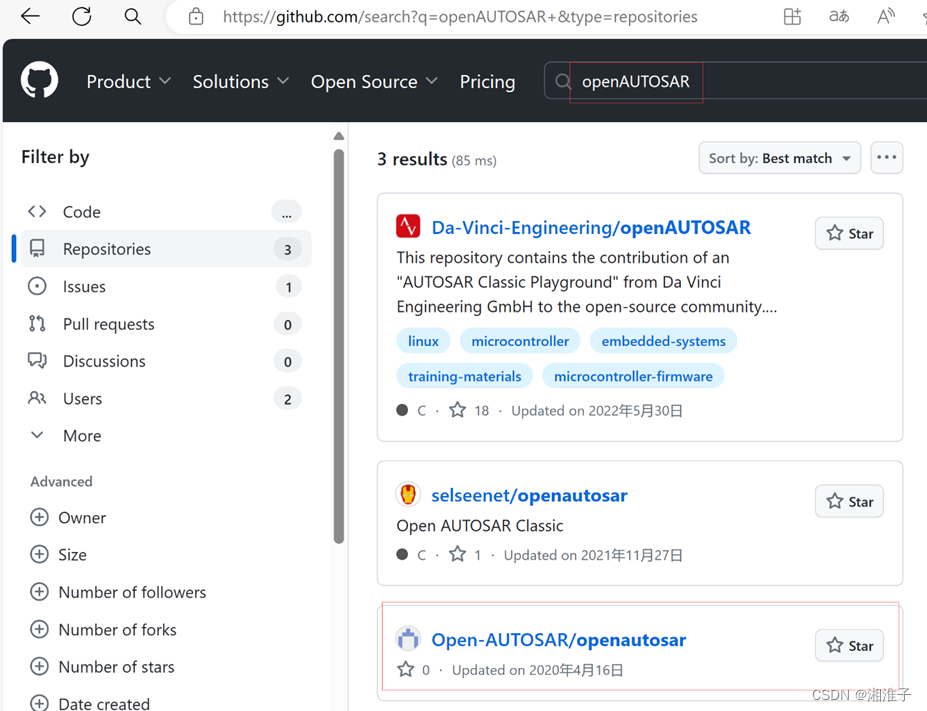
AUTOSAR配置工具开发教程 - 开篇
简介 本系列的教程,主要讲述如何自己开发一套简单的AUTOSAR ECU配置工具。适用于有C# WPF基础的人员。 简易介绍见:如何打造AUTOSAR工具_autosar_mod_ecuconfigurationparameters-CSDN博客 实现版本 AUTOSAR 4.0.3AUTOSAR 4.2.2AUTOSAR 4.4.0 效果 …...
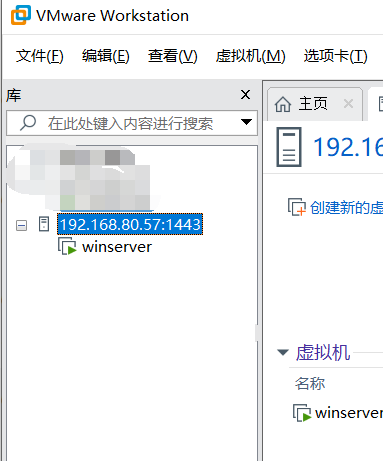
配置VM开机自启动
1. 在此电脑-右键选择“管理”-服务和应用程序-服务中找到VMware Workstation Server服务(新版名称也可能是VMware自启动服务,自己找一下,服务属性里有描述信息的),将其启用并选择开机自动启动 新版参考官方文档&…...
工作的第四天
推荐一个软件分配软件 我们看一下如何使用 连接信息 AOC中国官方网站 发现打开 还是这个页面信息,发现最后出现了页面重新定向的问题 我服了 我的码 怎么解决 我想用这个软件 来看看这个软件下载就可以使用 一听到钱我使用的情绪不是很高了 算了不使用 使用…...

前端开发语言概览:从HTML、CSS到JavaScript
随着互联网的发展,前端开发领域涌现出了许多不同的编程语言和技术,用于构建各种类型的网页和应用程序。本文将介绍几种主流的前端开发语言,包括 HTML、CSS 和 JavaScript,并简要讨论它们在前端开发中的作用和特点。 1. HTML&…...

《Java面试自救指南》(专题二)计算机网络
文章目录 力推的计网神课get请求和post请求的区别在浏览器网址输入一个url后直到浏览器显示页面的过程常用状态码session 和 cookie的区别TCP的三次握手和四次挥手七层OSI模型(TCP/IP协议模型)各种io模型的知识http协议和tcp协议的区别https和http的区别…...
)
Android14音频进阶之<进阶调试>:Perfetto定位系统音频问题(六十六)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒体系统工程师系列【原创干货持续更新中……】🚀 优质视频课程:AAOS车载系统+AOSP…...
使用 Clickhouse 集成的表引擎同步数据方式详解
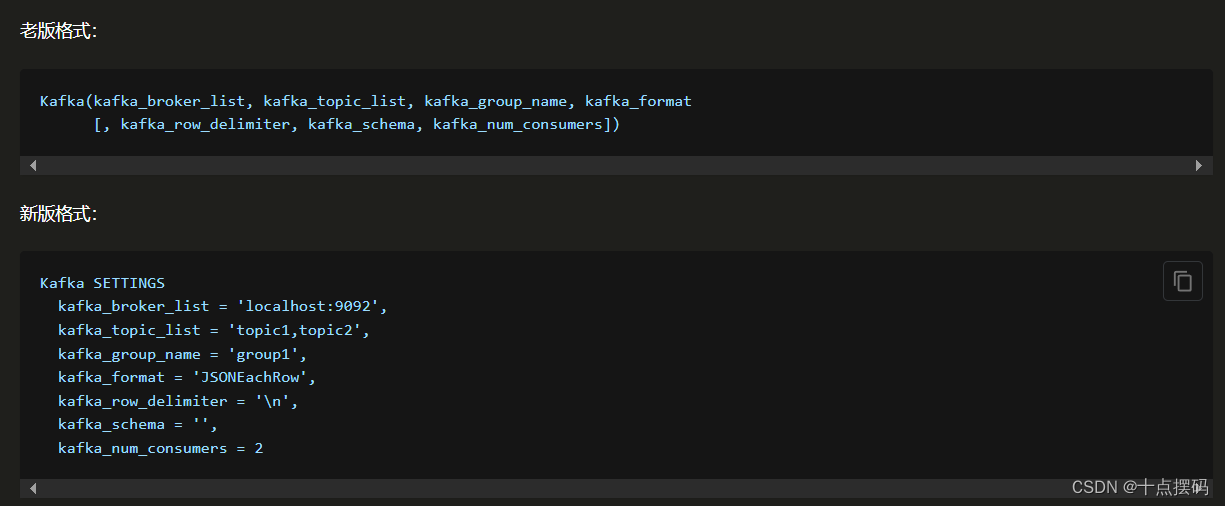
Clickhouse作为一个列式存储分析型数据库,提供了很多集成其他组件的表引擎数据同步方案。 官网介绍 一 Kafka 表引擎 使用Clickhouse集成的Kafka表引擎消费Kafka写入Clickhouse表中。 1.1 流程图 1.2 建表 根据上面的流程图需要建立三张表,分别Click…...
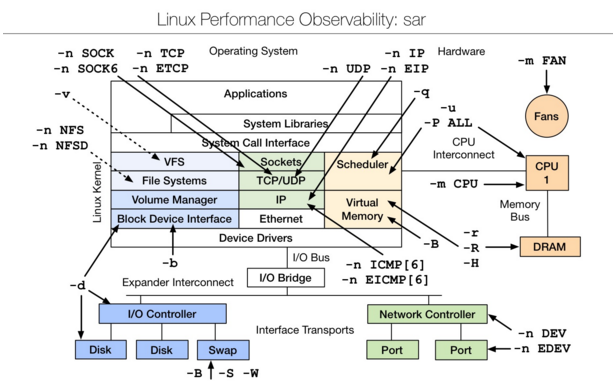
Linux 性能分析工具大全
vmstat--虚拟内存统计 vmstat(VirtualMeomoryStatistics,虚拟内存统计)是 Linux 中监控内存的常用工具,可对操作系统的虚拟内存、进程、CPU 等的整体情况进行监视。vmstat 的常规用法:vmstat interval times 即每隔 interval 秒采…...

FME学习之旅---day21
我们付出一些成本,时间的或者其他,最终总能收获一些什么。 教程:AutoCAD 变换 相关的文章 为您的 DWG 赋予一些样式:使用 DWGStyler、模板文件、块等 FME数据检查器在显示行的方式上受到限制。它只能显示线条颜色,而…...
volta(轻松切换管理Node.js版本)
Node.js版本管理 Volta提供了一个简单直观的命令行界面,可以轻松地安装、卸载、更新和切换Node.js版本。 Volta 既可以全局使用,也可以在项目级别使用,可以为每个项目单独设置node版本,nvm不行。 下载安装Volta 参考: …...
机器学习知识点
1鸢尾花分类 鸢尾花分类问题是一个经典的机器学习问题,旨在根据鸢尾花的花萼长度、花萼宽度、花瓣长度和花瓣宽度等特征,将鸢尾花分成三个品种:山鸢尾(setosa)、变色鸢尾(versicolor)和维吉尼亚…...

SQL注入利用学习-Union联合注入
联合注入的原理 在SQL语句中查询数据时,使用select 相关语句与where 条件子句筛选符合条件的记录。 select * from person where id 1; #在person表中,筛选出id1的记录如果该id1 中的1 是用户可以控制输入的部分时,就有可能存在SQL注入漏洞…...

zookeeper源码(12)命令行客户端
zkCli.sh脚本 这个命令行脚本在bin目录下: ZOOBIN"${BASH_SOURCE-$0}" ZOOBIN"$(dirname "${ZOOBIN}")" ZOOBINDIR"$(cd "${ZOOBIN}"; pwd)"# 加载zkEnv.sh脚本 if [ -e "$ZOOBIN/../libexec/zkEnv.sh&qu…...
深度学习的数学基础--Homework2
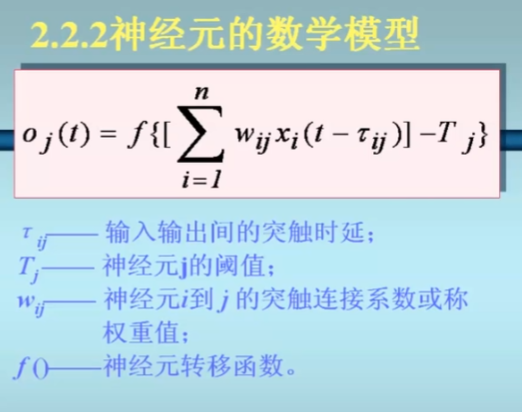
学习资料:https://www.bilibili.com/video/BV1mg4y187qv/?spm_id_from333.788.recommend_more_video.1&vd_sourced6b1de7f052664abab680fc242ef9bc1 神经网络的特点:它不是一个解析模型,它的储存在一堆参数里面(确定一个超平…...

智慧树网课自动化学习插件:三步告别手动刷课的完整指南
智慧树网课自动化学习插件:三步告别手动刷课的完整指南 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台冗长的网课视频而烦恼吗࿱…...

3个简单步骤让你的Windows桌面瞬间整洁:免费开源分区工具NoFences终极指南
3个简单步骤让你的Windows桌面瞬间整洁:免费开源分区工具NoFences终极指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否厌倦了桌面上杂乱无章的图标&…...

语义分割模型库选型指南:除了segmentation_models_pytorch,还有哪些宝藏库?附113个编码器实战对比
语义分割模型库深度选型指南:从SMP到工业级解决方案全景解析 当面对一个全新的语义分割项目时,工程师们往往会在众多开源模型库前陷入选择困难。本文将带您深入剖析主流语义分割工具库的技术特性、适用场景与实战表现,帮助您做出精准的技术决…...
)
保姆级教程:在IMX6ULL开发板上手把手实现红外遥控器驱动(基于NEC协议与Linux 5.x内核)
从零构建IMX6ULL红外遥控驱动:NEC协议全解析与Linux 5.x实战指南 当你想在嵌入式设备上实现红外遥控功能时,NEC协议驱动的开发往往是第一个需要攻克的堡垒。本文将带你深入理解红外通信原理,并手把手完成从硬件连接到驱动测试的全流程。不同于…...

【MATLAB】基于MATLAB的图像加密传输平台【GUI+源码+项目说明】
【MATLAB】基于MATLAB的图像加密传输平台【GUI源码项目说明】 一、项目介绍 数字图像具有数据量大、像素间相关性强、视觉冗余度高的特点, 传统的字节级加密 (如 AES) 直接作用于图像比特流虽能保密, 但无法破坏图像在空间域的统计特征. 本项目采用 “Arnold 置乱 明文相关 Lo…...

BilibiliDown:跨平台B站视频下载完整解决方案实战指南
BilibiliDown:跨平台B站视频下载完整解决方案实战指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/b…...

[物联网入门实战] 从零搭建C51最小系统:Proteus仿真点亮LED全流程解析
1. 为什么选择C51最小系统入门物联网? 很多刚接触物联网开发的朋友都会遇到一个难题:硬件成本高、调试复杂、学习曲线陡峭。我当年自学嵌入式时,烧坏过好几块开发板,后来发现用Proteus仿真C51最小系统是最稳妥的入门方式。这套组合…...

Flutter聊天UI组件库flutter_chat_ui:快速构建高质量聊天界面
1. 项目概述与核心价值如果你正在用Flutter开发一个聊天应用,并且不想从零开始手搓UI组件,那么flyerhq/flutter_chat_ui这个开源库,绝对值得你花时间研究一下。它不是一个完整的聊天SDK,不负责消息的发送、接收和存储,…...

3D打印操作辅助工具:自制安全高效的“过来放大器”
1. 项目概述:当3D打印遇上“过来”放大器在3D打印这个行当里折腾了这么多年,我见过各种稀奇古怪的“魔改”和“土法炼钢”,但最近一个朋友工作室里出现的一个小玩意儿,还是让我眼前一亮。他管它叫“3D打印设备专用过来放大器”。初…...

Win11Debloat:如何用5分钟让Windows 11回归纯净本质?
Win11Debloat:如何用5分钟让Windows 11回归纯净本质? 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declut…...