018——红外遥控模块驱动开发(基于HS0038和I.MX6uLL)
目录
一、 模块介绍
1.1 简介
1.2 协议
二、 驱动代码
三、 应用代码
四、 实验
五、 程序优化
一、 模块介绍
1.1 简介
红外遥控被广泛应用于家用电器、工业控制和智能仪器系统中,像我们熟知的有电视机盒子遥控器、空调遥控器。红外遥控器系统分为发送端和接收端,如图下图所示。

发送端就是红外遥控器,上面有许多按键,当我们按下遥控器按键时,遥控器内部电路会进行编码和调制,再通过红外发射头,将信号以肉眼不可见的红外线发射出去。红外线线虽然肉眼不可见,但可以通过手机摄像头看到,常用该方法检查遥控器是否正常工作。接收端是一个红外接收头,收到红外信号后,内部电路会进行信号放大和解调,再将数据传给板子上的 GPIO,板子收到数据后再解码才能确定是哪个按键被按下。


1.2 协议
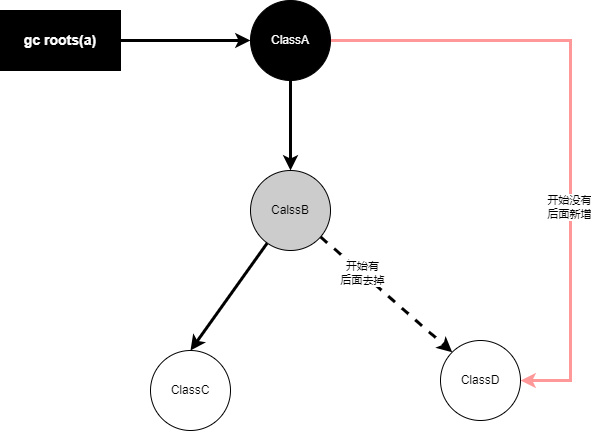
我们按下遥控器按键的时候,遥控器自动发送某个红外信号,接收头接收到红外信号,然后把红外信号转换成电平信号,通过 IRD 这根线,传给 SOC。整个传输,只涉及单向传输,由 HS0038 向主芯片传送。因此,我们只需要编写程序,从 IRD 上获取数据即可,在这之前,我们需要先了解下数据是怎么表示的,也就是传输的红外数据的格式。
红外协议有: NEC、 SONY、 RC5、 RC6 等,常用的就是 NEC 格式,因此我们主要对 NEC 进行讲解。在分析文章中的波形之前,我们先想象一下怎么在一条数据线上传输信号。开始传输数据之前,一般都会发出一个 start 起始信号,通知对方我开始传输数据了,后面就是每一位每一位的数据。NEC 协议的开始是一段引导码

这个引导码由一个 9ms 的低脉冲加上一个 4.5ms 的高脉冲组成,它用来通知接收方我要开始传输数据了。

然后接着的是数据,数据由 4 字节组成:地址、地址(取反)、数据、数据(取反),取反是用来校验用的。地址是指遥控器的 ID,每一类遥控器的 ID 都不一样,这样就可以防止操控电视的遥控器影响空调。数据就是遥控器上的不同按键值。从前面的图可以知道, NEC 每次要发 32 位(地址、地址取反、数据、数据取反,每个 8 位)的数据。数据的 1 和 0,开始都是 0.56ms 的低脉冲,对于数据 1,后面的高脉冲比较长,对于数据 0,后面的高脉冲比较短。

第一次按下按键时,它会发出引导码,地址,地址取反,数据,数据取反。
如果这时还没松开按键,这就是“长按”,怎么表示“长按”?遥控器会发送一个不一样的引导码,这个引导码由 9ms 的低脉冲, 2.25ms 的高脉冲组成,表示现在按的还是上次一样的按键,也叫连发码,它会一直发送,直到松开

二、 驱动代码
#include "asm-generic/errno-base.h"
#include "linux/jiffies.h"
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_desc{int gpio;int irq;char *name;int key;struct timer_list key_timer;
} ;static struct gpio_desc gpios[] = {{115, 0, "irda", },
};/* 主设备号 */
static int major = 0;
static struct class *gpio_class;/* 环形缓冲区 */
#define BUF_LEN 128
static unsigned char g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;static u64 g_irda_irq_times[68];
static int g_irda_irq_cnt = 0;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(unsigned char key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static unsigned char get_key(void)
{unsigned char key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{/* 超时 */g_irda_irq_cnt = 0;put_key(-1);put_key(-1);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t irda_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{unsigned char kern_buf[2] ;int err;if (size != 2)return -EINVAL;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_wait, !is_key_buf_empty());kern_buf[0] = get_key(); /* device */kern_buf[1] = get_key(); /* data */if (kern_buf[0] == (unsigned char)-1 && kern_buf[1] == (unsigned char)-1)return -EIO;err = copy_to_user(buf, kern_buf, 2);return 2;
}static unsigned int irda_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int irda_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = irda_read,.poll = irda_poll,.fasync = irda_fasync,
};static void parse_irda_datas(void)
{u64 time;int i;int m, n;unsigned char datas[4];unsigned char data = 0;int bits = 0;int byte = 0;/* 1. 判断前导码 : 9ms的低脉冲, 4.5ms高脉冲 */time = g_irda_irq_times[1] - g_irda_irq_times[0];if (time < 8000000 || time > 10000000){goto err;}time = g_irda_irq_times[2] - g_irda_irq_times[1];if (time < 3500000 || time > 55000000){goto err;}/* 2. 解析数据 */for (i = 0; i < 32; i++){m = 3 + i*2;n = m+1;time = g_irda_irq_times[n] - g_irda_irq_times[m];data <<= 1;bits++;if (time > 1000000){/* 得到了数据1 */data |= 1;}if (bits == 8){datas[byte] = data;byte++;data = 0;bits = 0;}}/* 判断数据正误 */datas[1] = ~datas[1];datas[3] = ~datas[3];if ((datas[0] != datas[1]) || (datas[2] != datas[3])){printk("data verify err: %02x %02x %02x %02x\n", datas[0], datas[1], datas[2], datas[3]);goto err;}put_key(datas[0]);put_key(datas[2]);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);return;err:g_irda_irq_cnt = 0;put_key(-1);put_key(-1);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_desc *gpio_desc = dev_id;u64 time;/* 1. 记录中断发生的时刻 */ time = ktime_get_ns();g_irda_irq_times[g_irda_irq_cnt] = time;/* 2. 累计中断次数 */g_irda_irq_cnt++;/* 3. 次数达标后, 删除定时器, 解析数据, 放入buffer, 唤醒APP */if (g_irda_irq_cnt == 68){parse_irda_datas();del_timer(&gpio_desc->key_timer);g_irda_irq_cnt = 0;}/* 4. 启动定时器 */mod_timer(&gpio_desc->key_timer, jiffies + msecs_to_jiffies(100));return IRQ_HANDLED;
}/* 在入口函数 */
static int __init irda_init(void)
{int err;int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);for (i = 0; i < count; i++){ gpios[i].irq = gpio_to_irq(gpios[i].gpio);setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);}/* 注册file_operations */major = register_chrdev(0, "100ask_irda", &gpio_key_drv); /* /dev/gpio_desc */gpio_class = class_create(THIS_MODULE, "100ask_irda_class");if (IS_ERR(gpio_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_gpio_key");return PTR_ERR(gpio_class);}device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "irda"); /* /dev/irda */return err;
}/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit irda_exit(void)
{int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(gpio_class, MKDEV(major, 0));class_destroy(gpio_class);unregister_chrdev(major, "100ask_irda");for (i = 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);del_timer(&gpios[i].key_timer);}
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(irda_init);
module_exit(irda_exit);MODULE_LICENSE("GPL");三、 应用代码
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>static int fd;/** ./button_test /dev/irda**/
int main(int argc, char **argv)
{unsigned char buf[2];/* 1. 判断参数 */if (argc != 2) {printf("Usage: %s <dev>\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}while (1){if (read(fd, buf, 2) == 2)printf("get irda: deivce 0x%02x, data 0x%02x\n", buf[0], buf[1]);elseprintf("get irda: -1\n");}close(fd);return 0;
}四、 实验
因为ip默认是dhcp分配的所以,我ifconfig后dhcp会给我覆盖掉烦死啦,所以配置一下永久生效的好了
![]()

auto lo
iface lo inet loopbackauto eth0
iface eth0 inet static
address 192.168.5.110
netmask 255.255.255.0
gareway 192.168.5.1
不是所有的按键都好使不知道为什么
五、 程序优化
#include "asm-generic/errno-base.h"
#include "linux/jiffies.h"
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_desc{int gpio;int irq;char *name;int key;struct timer_list key_timer;
} ;static struct gpio_desc gpios[] = {{115, 0, "irda", },
};/* 主设备号 */
static int major = 0;
static struct class *gpio_class;/* 环形缓冲区 */
#define BUF_LEN 128
static unsigned char g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;static u64 g_irda_irq_times[68];
static int g_irda_irq_cnt = 0;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(unsigned char key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static unsigned char get_key(void)
{unsigned char key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{/* 超时 */g_irda_irq_cnt = 0;put_key(-1);put_key(-1);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t irda_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{unsigned char kern_buf[2] ;int err;if (size != 2)return -EINVAL;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_wait, !is_key_buf_empty());kern_buf[0] = get_key(); /* device */kern_buf[1] = get_key(); /* data */if (kern_buf[0] == (unsigned char)-1 && kern_buf[1] == (unsigned char)-1)return -EIO;err = copy_to_user(buf, kern_buf, 2);return 2;
}static unsigned int irda_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int irda_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = irda_read,.poll = irda_poll,.fasync = irda_fasync,
};static void parse_irda_datas(void)
{u64 time;int i;int m, n;unsigned char datas[4];unsigned char data = 0;int bits = 0;int byte = 0;/* 1. 判断前导码 : 9ms的低脉冲, 4.5ms高脉冲 */time = g_irda_irq_times[1] - g_irda_irq_times[0];if (time < 8000000 || time > 10000000){goto err;}time = g_irda_irq_times[2] - g_irda_irq_times[1];if (time < 3500000 || time > 55000000){goto err;}/* 2. 解析数据 */for (i = 0; i < 32; i++){m = 3 + i*2;n = m+1;time = g_irda_irq_times[n] - g_irda_irq_times[m];data <<= 1;bits++;if (time > 1000000){/* 得到了数据1 */data |= 1;}if (bits == 8){datas[byte] = data;byte++;data = 0;bits = 0;}}/* 判断数据正误 */datas[1] = ~datas[1];datas[3] = ~datas[3];if ((datas[0] != datas[1]) || (datas[2] != datas[3])){printk("data verify err: %02x %02x %02x %02x\n", datas[0], datas[1], datas[2], datas[3]);goto err;}put_key(datas[0]);put_key(datas[2]);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);return;err:g_irda_irq_cnt = 0;put_key(-1);put_key(-1);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}static int get_irda_repeat_datas(void)
{u64 time;/* 1. 判断重复码 : 9ms的低脉冲, 2.25ms高脉冲 */time = g_irda_irq_times[1] - g_irda_irq_times[0];if (time < 8000000 || time > 10000000){return -1;}time = g_irda_irq_times[2] - g_irda_irq_times[1];if (time < 2000000 || time > 2500000){return -1;} return 0;
}static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_desc *gpio_desc = dev_id;u64 time;/* 1. 记录中断发生的时刻 */ time = ktime_get_ns();g_irda_irq_times[g_irda_irq_cnt] = time;/* 2. 累计中断次数 */g_irda_irq_cnt++;/* 3. 次数达标后, 删除定时器, 解析数据, 放入buffer, 唤醒APP */if (g_irda_irq_cnt == 4){/* 是否重复码 */if (0 == get_irda_repeat_datas()){/* device: 0, val: 0, 表示重复码 */put_key(0);put_key(0);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);del_timer(&gpio_desc->key_timer);g_irda_irq_cnt = 0;return IRQ_HANDLED;}}if (g_irda_irq_cnt == 68){parse_irda_datas();del_timer(&gpio_desc->key_timer);g_irda_irq_cnt = 0;return IRQ_HANDLED;}/* 4. 启动定时器 */mod_timer(&gpio_desc->key_timer, jiffies + msecs_to_jiffies(100));return IRQ_HANDLED;
}/* 在入口函数 */
static int __init irda_init(void)
{int err;int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);for (i = 0; i < count; i++){ gpios[i].irq = gpio_to_irq(gpios[i].gpio);setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);}/* 注册file_operations */major = register_chrdev(0, "100ask_irda", &gpio_key_drv); /* /dev/gpio_desc */gpio_class = class_create(THIS_MODULE, "100ask_irda_class");if (IS_ERR(gpio_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_gpio_key");return PTR_ERR(gpio_class);}device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "irda"); /* /dev/irda */return err;
}/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit irda_exit(void)
{int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(gpio_class, MKDEV(major, 0));class_destroy(gpio_class);unregister_chrdev(major, "100ask_irda");for (i = 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);del_timer(&gpios[i].key_timer);}
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(irda_init);
module_exit(irda_exit);MODULE_LICENSE("GPL");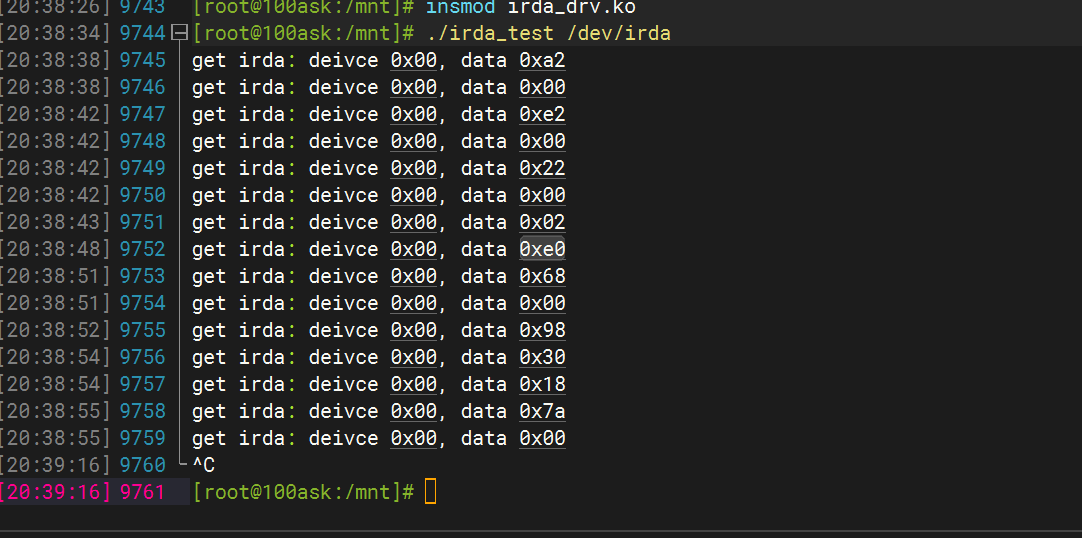
这次没有那个-1了,按下和弹起时都会有数据被拿到
相关文章:
018——红外遥控模块驱动开发(基于HS0038和I.MX6uLL)
目录 一、 模块介绍 1.1 简介 1.2 协议 二、 驱动代码 三、 应用代码 四、 实验 五、 程序优化 一、 模块介绍 1.1 简介 红外遥控被广泛应用于家用电器、工业控制和智能仪器系统中,像我们熟知的有电视机盒子遥控器、空调遥控器。红外遥控器系统分为发送端和…...
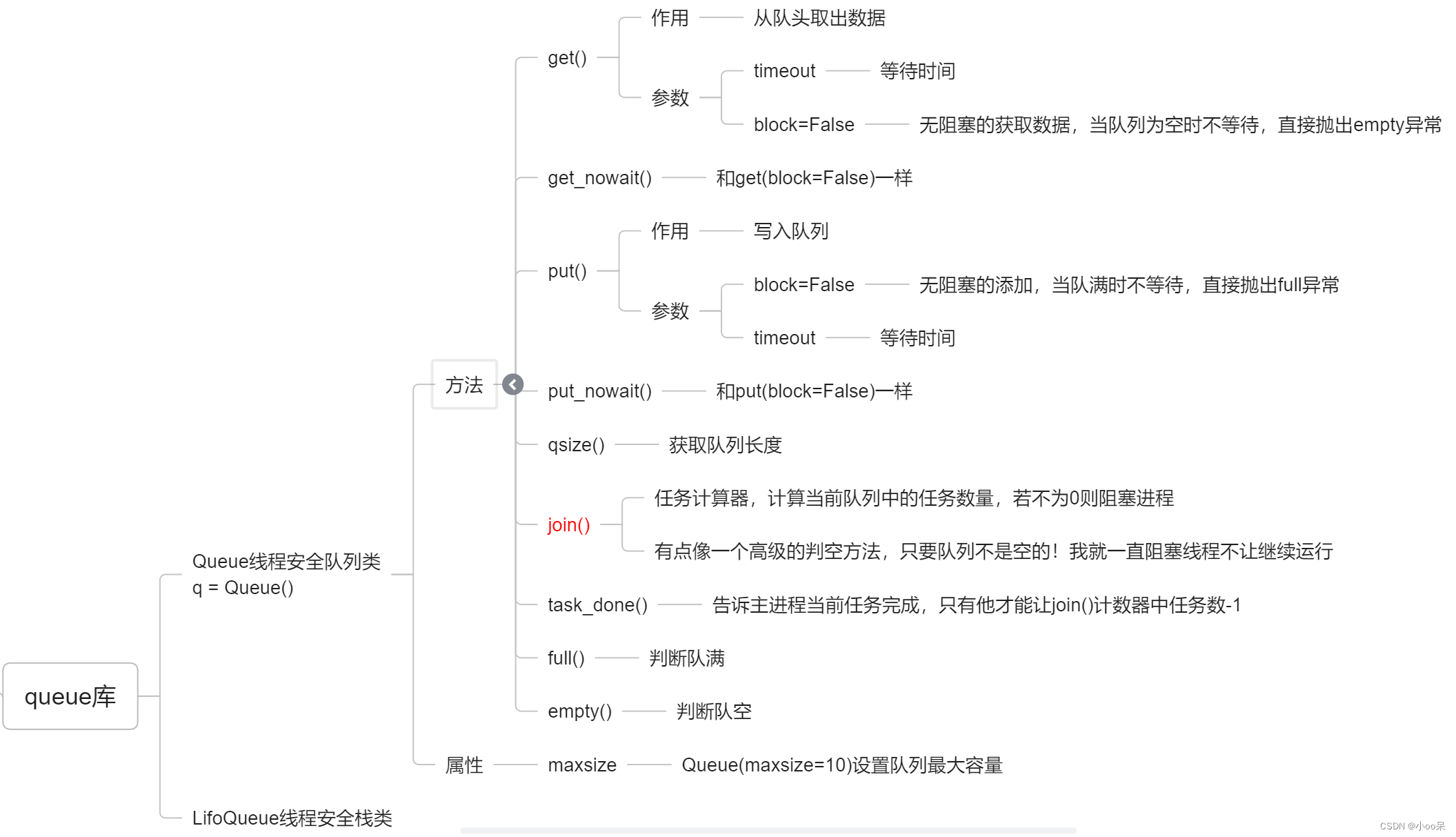
【学习心得】Python中的queue模块使用
一、Queue模块的知识点思维导图 二、Queue模块常用函数介绍 queue模块是内置的,不需要安装直接导入就可以了。 (1)创建一个Queue对象 import queue# 创建一个队列实例 q queue.Queue(maxsize20) # 可选参数,默认为无限大&am…...

ubuntu-server部署hive-part4-部署hive
参照 https://blog.csdn.net/qq_41946216/article/details/134345137 操作系统版本:ubuntu-server-22.04.3 虚拟机:virtualbox7.0 部署hive 下载上传 下载地址 http://archive.apache.org/dist/hive/ apache-hive-3.1.3-bin.tar.gz 以root用户上传至…...
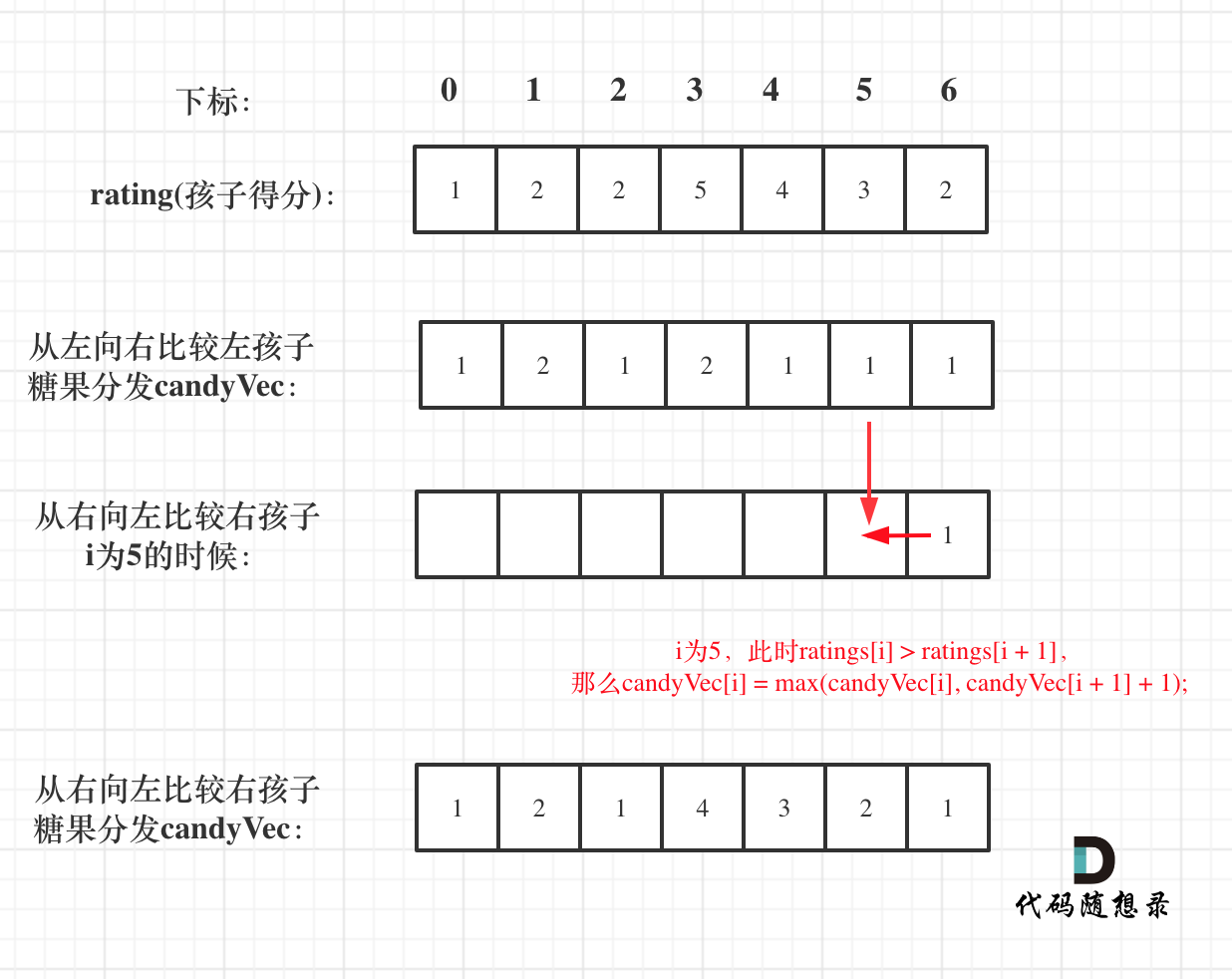
贪心算法|135.分发糖果
力扣题目链接 class Solution { public:int candy(vector<int>& ratings) {vector<int> candyVec(ratings.size(), 1);// 从前向后for (int i 1; i < ratings.size(); i) {if (ratings[i] > ratings[i - 1]) candyVec[i] candyVec[i - 1] 1;}// 从后…...
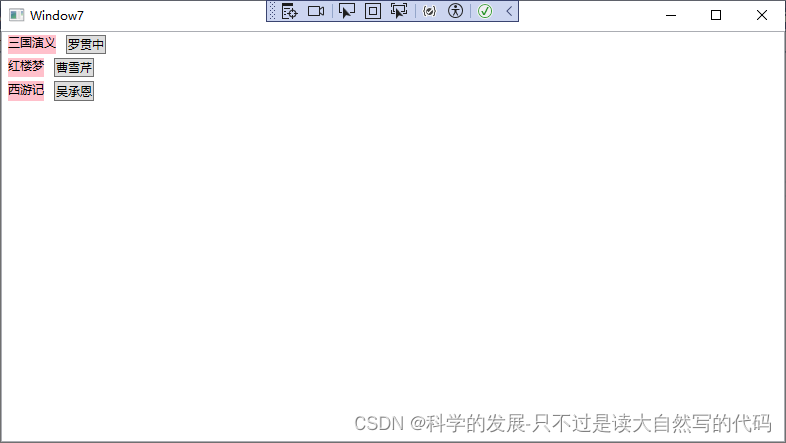
c# wpf template itemtemplate+ListBox
1.概要 2.代码 <Window x:Class"WpfApp2.Window7"xmlns"http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x"http://schemas.microsoft.com/winfx/2006/xaml"xmlns:d"http://schemas.microsoft.com/expression/blend/…...
关于JVM-三色标记算法剖析
相关系列 深入理解JVM垃圾收集器-CSDN博客 深入理解JVM垃圾收集算法-CSDN博客 深入理解jvm执行引擎-CSDN博客 jvm优化原则-CSDN博客 jvm流程图-CSDN博客 三色标记产生的原因? 在并发标记的过程中,因为标记期间应用线程还在继续跑,对象间的引…...
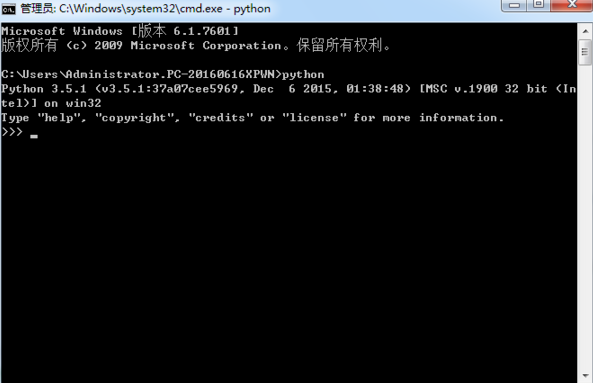
怎么看有没有装python
windows系统,运行——cmd,进入dos窗口,输入python,安装成功的话可以看到版本信息并进入编程模式。 如下图(我安装的版本是python 3.5.1):...

VS CODE环境安装和hello world
SAP UI5 demo walkthrough tutorial step1 hello word 首先要安装nodejs,然后才能执行下面的操作 nodejs vscode 安装ui5 npm install --global ui5/cli报错解决: idealTree:npm: sill idealTree buildDeps 这个信息说明npm正在构建,如一直停留在这个…...

mysql性能索引调优易混点总结
文章目录 一、 前言二、explain相关三、索引优化相关联合索引索引下推排序和分组相关优化分页优化表关联优化嵌套循环连接 Nested-Loop Join(NLJ) 算法in和exsits优化 一、 前言 近几年看了很多和mysql相关的书,文章或视频,但仍然有一些点,看…...

区块链与数字身份:探索Facebook的新尝试
在数字化时代,随着区块链技术的崛起,数字身份成为了一个备受关注的话题。作为全球最大的社交媒体平台之一,Facebook一直在探索如何利用区块链技术来改善数字身份管理和用户数据安全。本文将深入探讨Facebook在这一领域的新尝试,探…...
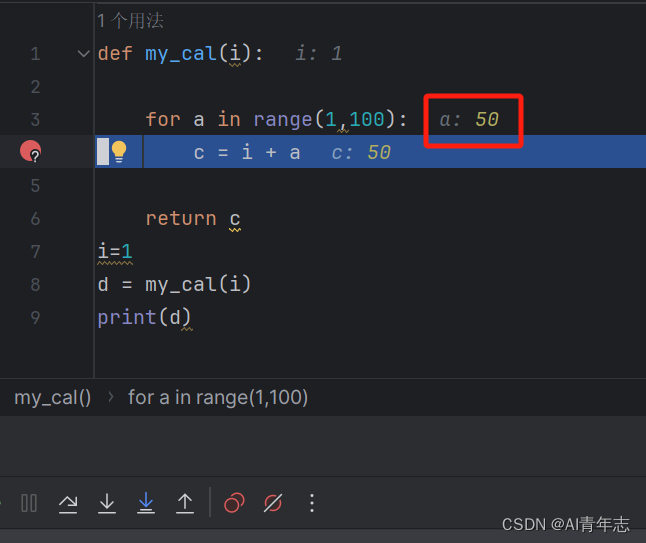
【pycharm】在debug循环时,如何快速debug到指定循环次数
【pycharm】在debug循环时,如何快速debug到指定循环次数 【先赞后看养成习惯】求关注收藏点赞😀 在 PyCharm 中,可以使用条件断点来实现在特定循环次数后停止调试。这可以通过在断点处右键单击,然后选择 “Add Breakpoint” -&g…...

【蓝桥杯每日一题】4.8 公约数
题目来源: 4199. 公约数 - AcWing题库 问题描述: 找到最大整数x,需满足下面两个条件 x x x是 a a a, b b b的公约数 l < x < r l<x<r l<x<r 思路: 找到 a a a, b b b两个数的最大公约数 g c g c d (…...

【MySQL学习】MySQL的慢查询日志和错误日志
꒰˃͈꒵˂͈꒱ write in front ꒰˃͈꒵˂͈꒱ ʕ̯•͡˔•̯᷅ʔ大家好,我是xiaoxie.希望你看完之后,有不足之处请多多谅解,让我们一起共同进步૮₍❀ᴗ͈ . ᴗ͈ აxiaoxieʕ̯•͡˔•̯᷅ʔ—CSDN博客 本文由xiaoxieʕ̯•͡˔•̯᷅ʔ 原创 CSDN …...

# C++之functional库用法整理
C之functional库用法整理 注:整理一些突然学到的C知识,随时mark一下 例如:忘记的关键字用法,新关键字,新数据结构 C 的function库用法整理 C之functional库用法整理一、functional库的内建仿函数1. 存储和调用函数2. 存…...
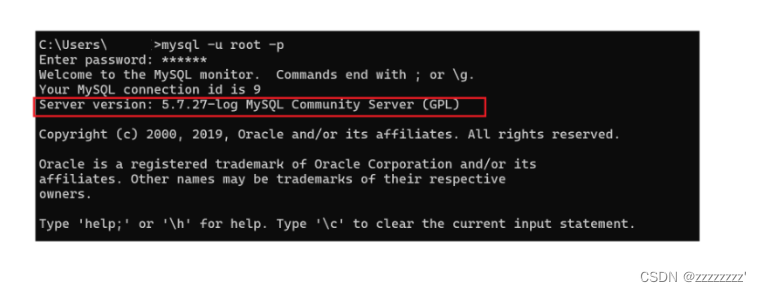
查看MySQL版本的方式
文章目录 一、使用cmd输入命令行查看二、在mysql客户端服务器里查询 一、使用cmd输入命令行查看 1、打开 cmd ,输入命令行: mysql --version 2、还是打开cmd,输入命令行:mysql -V (注意了,此时的V是个大写的V) 二、…...

k8s_入门_命令详解
命令详解 kubectl是官方的CLI命令行工具,用于与 apiserver进行通信,将用户在命令行输入的命令,组织并转化为 apiserver能识别的信息,进而实现管理k8s各种资源的一种有效途径 1. 帮助 2. 查看版本信息 3. 查看资源对象等 查看No…...

腾讯、阿里、字节….等大厂都更喜欢什么样的简历?
我985毕业,为什么筛选简历时输给了一个普通一本? 我投了20份简历,为什么没有一个大厂回我? 每次HR收到简历就没下文了,是我的简历有问题吗? 诚然,在求职时,简历往往就是我们给予H…...

OpenHarmony实战:帆移植案例(中)
OpenHarmony实战:帆移植案例(上) Audio服务介绍 服务节点 基于ADM框架的audio驱动对HDI层提供三个服务hdf_audio_render、hdf_audio_capture、hdf_audio_control。 开发板audio驱动服务节点如下: console:/dev # ls -al hdf_au…...

武汉星起航:创始人张振邦智慧领航,孵化伙伴共绘跨境新蓝图!
在风起云涌的跨境电商行业中,武汉星起航电子商务有限公司如同一颗璀璨的明星,引领着众多创业者迈向成功的彼岸。而这一切的背后,都离不开公司创始人张振邦先生的卓越领导与深厚经验。他凭借着在电子商务行业多年的深耕与积累,为武…...

上下收缩、折叠面板
效果: 上下收缩、折叠面板,类似QQ好友列表那种。原理就是在一个布局中,通过button来实现一个独立widget的visible/disable 实现: 1.分组按钮 #ifndef EXPANDPANEL_H #define EXPANDPANEL_H#include <QWidget>class…...
)
学一下PLC2--软件PLC(TODO)
既然你手头有 Raspberry Pi Pico,你甚至不需要买任何新的 PLC 硬件,可以直接把它变成一个标准的工业 PLC! 实现原理: OpenPLC 是一个开源的符合 IEC 61131-3 国际标准的 PLC 软件系统。 它完美支持 Raspberry Pi Pico (RP2040)。…...

从‘苹果落地’到‘参数更新’:用牛顿法迭代公式手写一个简单的神经网络优化器
从‘苹果落地’到‘参数更新’:用牛顿法迭代公式手写一个简单的神经网络优化器 当牛顿目睹苹果落地时,他看到的不仅是万有引力定律的雏形,更是一种用数学描述自然现象的思维方式。三百年后,这种思维方式在深度学习领域焕发新生——…...

Python 开发者五分钟接入 Taotoken 调用 GPT 与 Claude 模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python 开发者五分钟接入 Taotoken 调用 GPT 与 Claude 模型 对于需要在项目中集成大语言模型的 Python 开发者而言,逐…...

龙虾之父月耗 6030 亿 API token 花 130 万美元+,Token 成 AI 新生产资料?
【导语:龙虾之父 Peter Steinberger 一个月 API token 花费超 130 万美元,引发网友热议。他正探索 Token 不再重要时如何构建软件,Token 也逐渐成为新的生产资料。】高额 Token 花费引争议龙虾之父 Peter Steinberger 一个月 API token 花费高…...

Agent 工程化系列 · 第 13 篇_Agent安全与可靠性如何保障
Agent 工程化系列 第 13 篇 Agent 的安全与可靠性如何保障? Agent 最危险的不是回答错,而是执行错开篇定位 前面我们已经讲过:LLM 是能力核心,Agent 是执行系统;Function Call 让模型能够调用工具;MCP 负责…...

拆解进销存流程的5大核心功能,手把手教你规范企业的进销存流程
在现代企业的数字化管理中,规范进销存流程是提升运营效率、降低管理成本的关键所在。一个科学、严谨的进销存流程不仅能帮助企业实现采购、销售与库存数据的实时同步,还能有效解决账实不符、库存积压等长期痛点。本文将深入拆解进销存流程中的5大核心功能…...

终极D2DX宽屏补丁:让经典暗黑破坏神2在现代PC上完美重生
终极D2DX宽屏补丁:让经典暗黑破坏神2在现代PC上完美重生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 你是否还…...

轻量级工作流编排引擎:从脚本管理到自动化流程的实践指南
1. 项目概述:从单体脚本到流程编排的进化 如果你和我一样,在数据工程、自动化运维或者机器学习模型训练这些领域摸爬滚打过几年,大概率会遇到一个相似的困境:手头的任务脚本越来越多,它们之间有的有依赖关系࿰…...

暗黑3鼠标宏终极指南:D3KeyHelper 5步配置法快速上手
暗黑3鼠标宏终极指南:D3KeyHelper 5步配置法快速上手 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper D3KeyHelper是一款专为暗黑破坏神3玩…...

避坑指南:Unity热重载插件内存占用高?可能是Windows Defender在搞鬼
Unity热重载性能优化:解决Windows Defender导致的资源占用问题 当你在Unity开发过程中频繁修改C#代码时,热重载(Hot Reload)功能无疑是提升效率的利器。它能让你在游戏运行状态下即时看到代码修改效果,避免反复重启带来的时间浪费。然而&…...