HAL STM32 定时器PWM DMA输出方式
HAL STM32 定时器PWM DMA输出方式
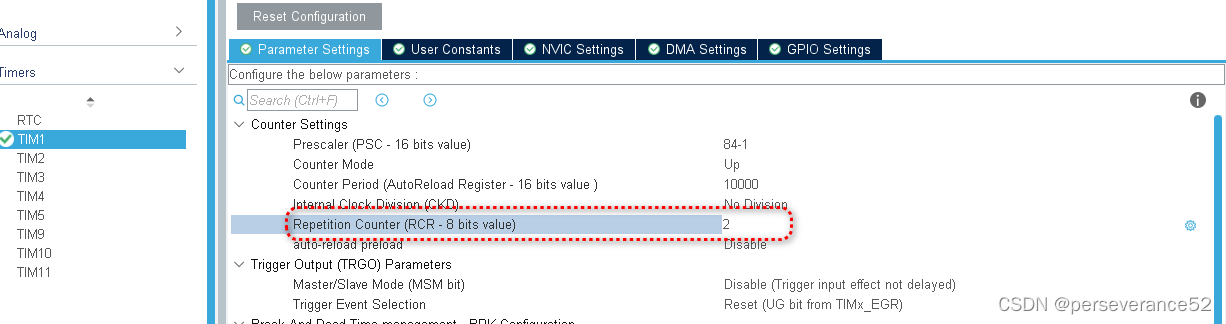
- 🧨遗留问题:当配置RCR重复计数器,配置为
2时,在定义了3组PWM参数情况下,只能输出第二组参数的PWM波形。(HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, aCCValue_Buffer, 3));设置其它计数值,则没有问题。如果RCR重复计数器为2,DMA配置2组PWM参数也没有问题。(HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, aCCValue_Buffer, 2))。


void MX_TIM1_Init(void)
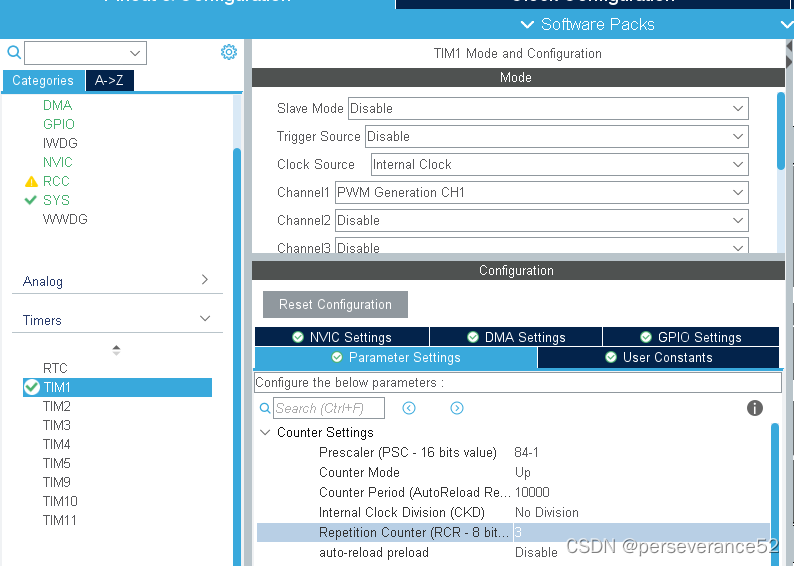
{/* USER CODE BEGIN TIM1_Init 0 *//* USER CODE END TIM1_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};/* USER CODE BEGIN TIM1_Init 1 *//* USER CODE END TIM1_Init 1 */htim1.Instance = TIM1;htim1.Init.Prescaler = 84-1;htim1.Init.CounterMode = TIM_COUNTERMODE_UP;htim1.Init.Period = 10000;htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim1.Init.RepetitionCounter = 3;//配置2则只能输出一组pwm波形htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim1) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim1) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 5000;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;sBreakDeadTimeConfig.DeadTime = 0;sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM1_Init 2 *//* USER CODE END TIM1_Init 2 */HAL_TIM_MspPostInit(&htim1);}- 🔖重复计数设置为
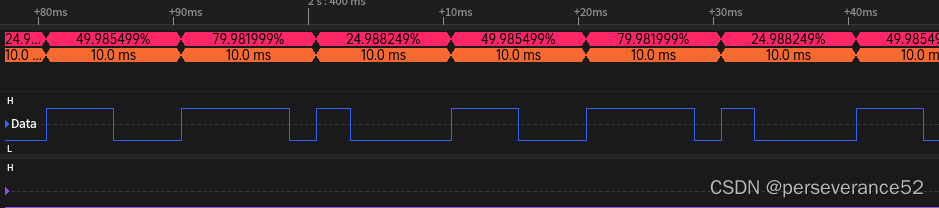
3,输出的3组pwm参数波形:

- 🔖重复计数设置为1,输出的3组pwm参数波形:

- 🔖重复计数设置为
0,输出的3组pwm参数波形:
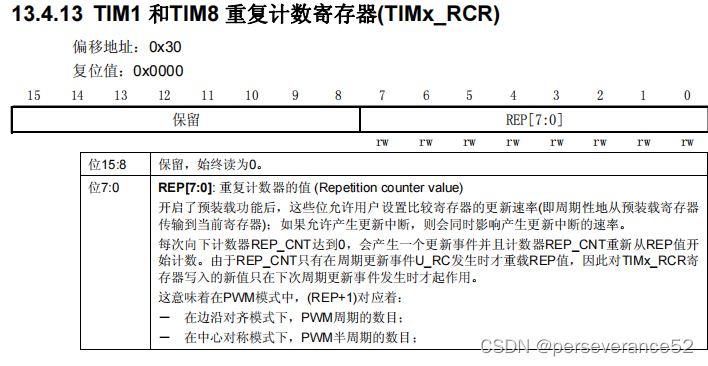
- 📑RCR寄存器中的值会随着定时器更新事件递减,一直到0,在允许更新事件UEV发生的情况下,则TIM的更新事件UEV就会产生;如果设置RCR的值为N,那么PWM模式下,更新事件将会在弟N+1个周期发生;
🛠STM32CubeMX配置
- 🌿选择定时TIM1,时钟源选择内部时钟源,PWM通道选择
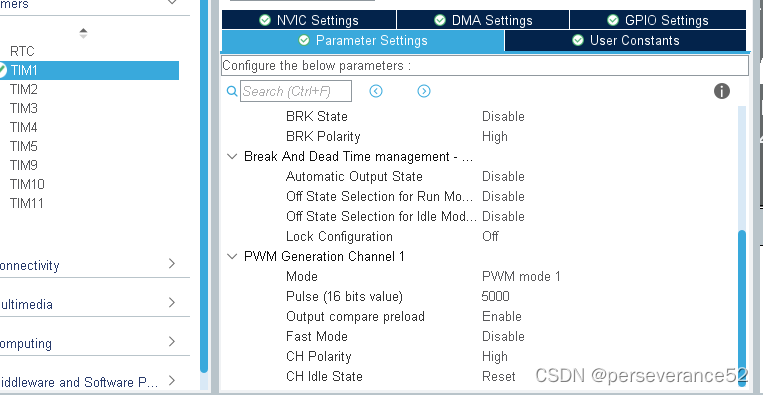
- 🌿PWM参数配置;(
Output compare preload默认使能开启)
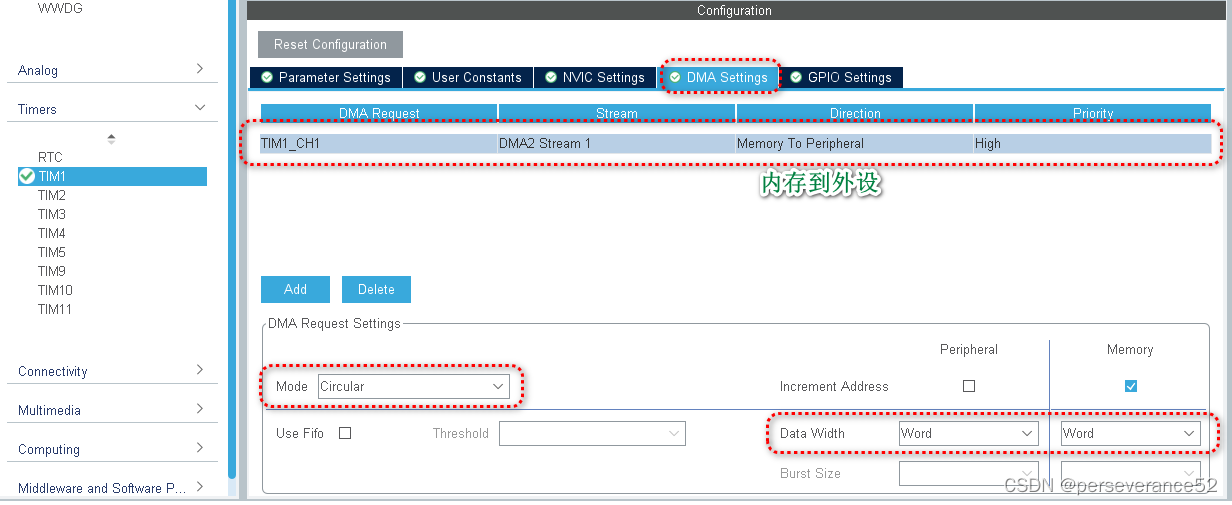
- 🌿DMA配置(stm32F4)
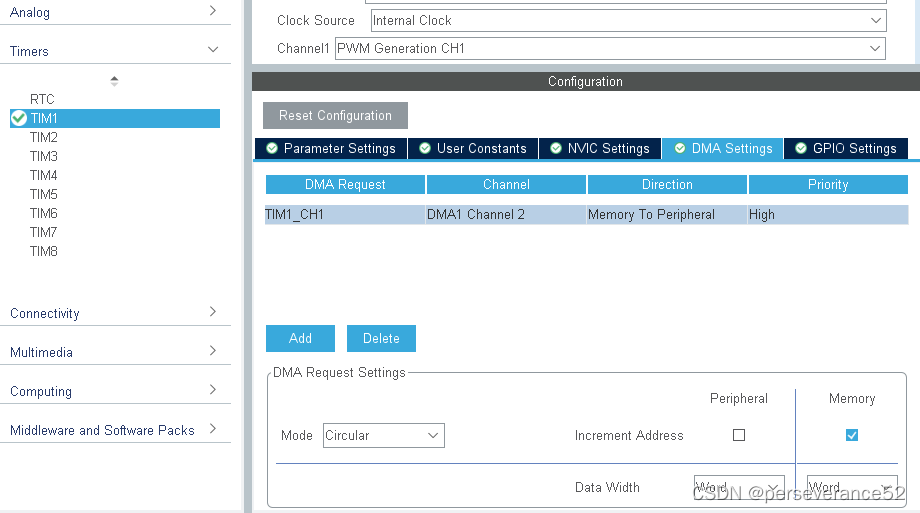
-🔖 stm32f103
📄业务代表
- 🌿main函数
int main(void)
{/* USER CODE BEGIN 1 */uint32_t aCCValue_Buffer[3] = {0, 0, 0};/* Compute CCR1 value to generate a duty cycle at 80% */aCCValue_Buffer[2] = (uint32_t)(((uint32_t) 80 * (10000 - 1)) / 100); //84000 000/* Compute CCR1 value to generate a duty cycle at 50% */aCCValue_Buffer[1] = (uint32_t)(((uint32_t) 50 * (10000 - 1)) / 100);/* Compute CCR1 value to generate a duty cycle at 25% */aCCValue_Buffer[0] = (uint32_t)(((uint32_t) 25 * (10000 - 1)) / 100);/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_DMA_Init();MX_TIM1_Init();/* USER CODE BEGIN 2 *//*## Start PWM signal generation in DMA mode ############################*/if (HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, aCCValue_Buffer, 3) != HAL_OK){/* Starting Error */Error_Handler();}/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}
参数工程
- 🌿stm32f103
链接:https://pan.baidu.com/s/1bKWQSkmbv4WoJgH07g9Y6g?pwd=ihj3
提取码:ihj3
- 🌿stm32f401
链接:https://pan.baidu.com/s/1KtpPRzCX_xS4ZaDI-uty6w?pwd=w0qj
提取码:w0qj
相关文章:
HAL STM32 定时器PWM DMA输出方式
HAL STM32 定时器PWM DMA输出方式 🧨遗留问题:当配置RCR重复计数器,配置为2时,在定义了3组PWM参数情况下,只能输出第二组参数的PWM波形。(HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1, aCCValue_Buff…...

博客部署004-centos安装mysql及redis
1、如何查看当前centos版本? cat /etc/os-release 2、安装mysql 我的是centos8版本,使用dnf命令 2.1 CentOS 7/8: sudo yum install -y mysql-community-server 或者在CentOS 8上,使用DNF:🌟 sudo dnf install -y mysql-ser…...

Hive 之 UDF 运用(包会的)
文章目录 UDF 是什么?reflect静态方法调用实例方法调用 自定义 UDF(GenericUDF)1.创建项目2.创建类继承 UDF3.数据类型判断4.编写业务逻辑5.定义函数描述信息6.打包与上传7.注册 UDF 函数并测试返回复杂的数据类型 UDF 是什么? H…...

数据驱动目标:如何通过OKR实现企业数字化转型
在数字化转型的浪潮中,企业管理者面临着前所未有的挑战和机遇。如何确保企业在变革中不仅能够生存,还能蓬勃发展?答案可能就在于有效的目标管理——特别是采用OKR(Objectives and Key Results,目标与关键成果ÿ…...
软考120-上午题-【软件工程】-软件开发模型02
一、演化模型 软件类似于其他复杂的系统,会随着时间的推移而演化。在开发过程中,常常会面临以下情形:商业和产品需求经常发生变化,直接导致最终产品难以实现;严格的交付时间使得开发团队不可能圆满地完成软件产品&…...

C语言面试题之返回倒数第 k 个节点
返回倒数第 k 个节点 实例要求 1、实现一种算法,找出单向链表中倒数第 k 个节点;2、返回该节点的值; 示例:输入: 1->2->3->4->5 和 k 2 输出: 4 说明:给定的 k 保证是有效的。实…...

力扣爆刷第116天之CodeTop100五连刷66-70
力扣爆刷第116天之CodeTop100五连刷66-70 文章目录 力扣爆刷第116天之CodeTop100五连刷66-70一、144. 二叉树的前序遍历二、543. 二叉树的直径三、98. 验证二叉搜索树四、470. 用 Rand7() 实现 Rand10()五、64. 最小路径和 一、144. 二叉树的前序遍历 题目链接:htt…...
B站广告推广操作教程及费用?
哔哩哔哩(B站)作为国内极具影响力的年轻人文化社区,已成为众多品牌与企业触达目标受众、提升品牌影响力的重要阵地。然而,面对B站复杂的广告系统与精细化运营需求,许多广告主可能对如何高效开展B站广告推广感到困惑。云…...

Linux操作系统之docker基础
目录 一、docker 1.1 简介 1.2 安装配置docker 二、dockerfile 1.1、简介 1.2、dockerfile 关键字 一、docker 1.1 简介 容器技术 容器其实就是虚拟机,每个容器可以运行不同的系统【系统是以linux为主的】 为什么要使用docker? docker容器之间相互隔…...

35-3 使用dnslog探测fastjson漏洞
一、DNSLog 原理 DNSLog是一种记录在DNS上的域名相关信息的机制,类似于日志文件,记录了对域名或IP的访问信息。了解多级域名的概念对理解DNSLog至关重要。因特网采用树状结构的命名方法,按照组织结构划分域,每个域都是名字空间中被管理的一个划分,可以进一步划分为子域。域…...

Qt——示波器/图表 QCustomPlot
一、介绍 QCustomPlot是一个用于绘图和数据可视化的Qt C小部件。它没有进一步的依赖关系,提供友好的文档帮助。这个绘图库专注于制作好看的,出版质量的2D绘图,图形和图表,以及为实时可视化应用程序提供高性能。QCustomPlot可以导出…...
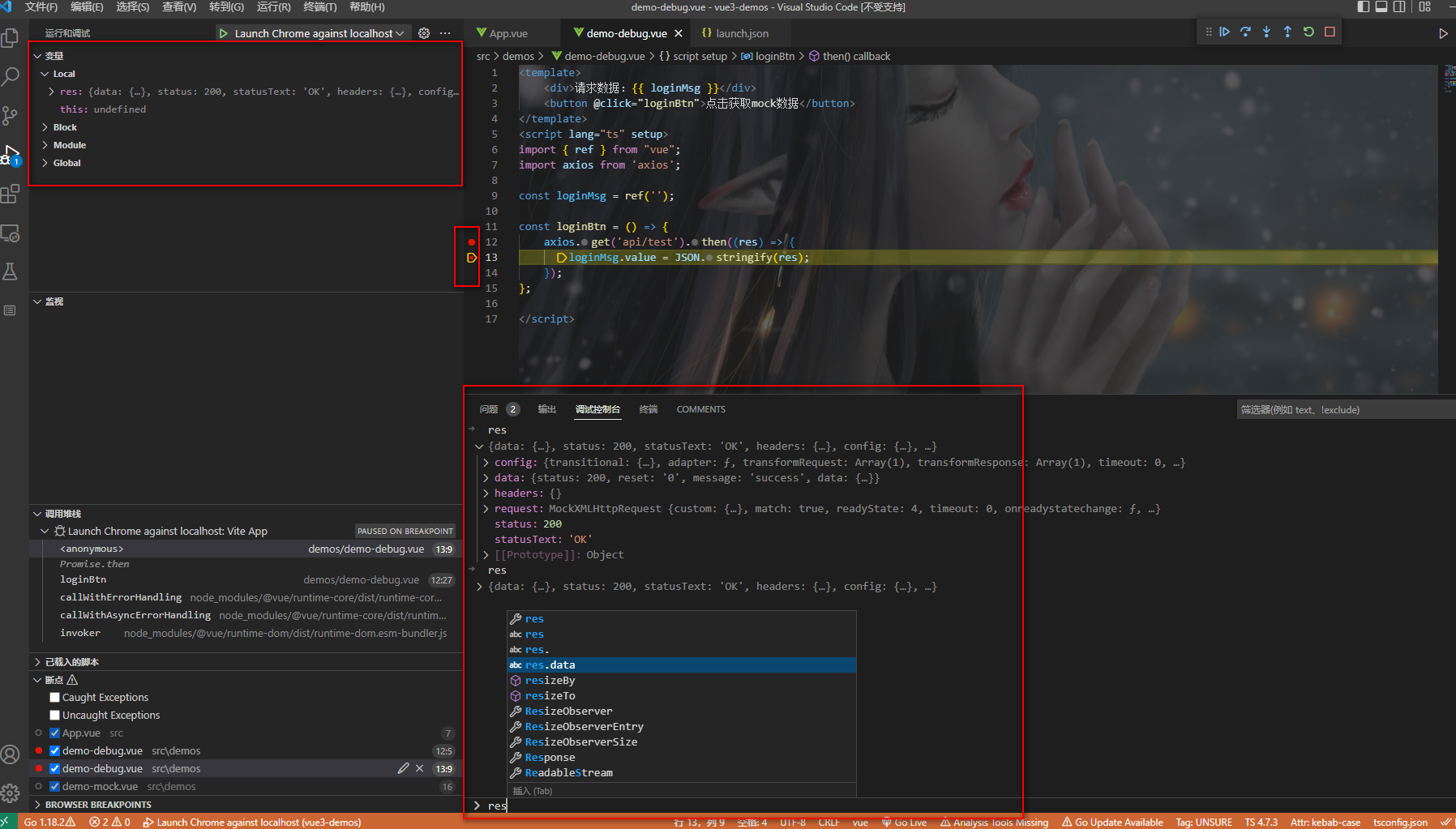
《图解Vue3.0》- 调试
如何对vue3项目进行调试 调试是开发过程中必备的一项技能,掌握了这项技能,可以很好的定义bug所在。一般在开发vue3项目时,有三种方式。 代码中添加debugger;使用浏览器调试:sourcemap需启用vs code 调试:先开启node服…...
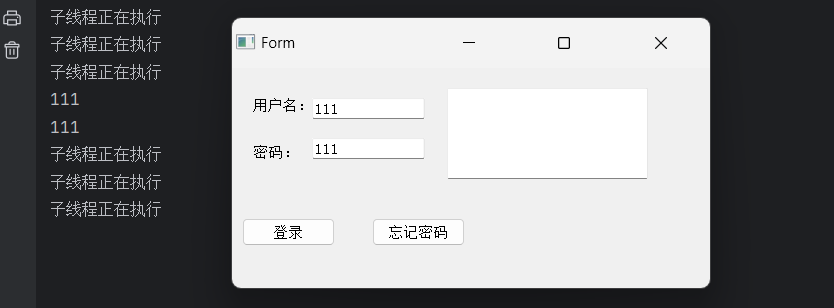
【PyQt5篇】和子线程进行通信
文章目录 🍔使用QtDesigner进行设计🛸和子线程进行通信🎈运行结果 🍔使用QtDesigner进行设计 我们首先使用QtDesigner设计界面 得到代码login.ui <?xml version"1.0" encoding"UTF-8"?> <ui …...

JavaScript数组操作方法全录
改变原数组的方法: push() - 将一个或多个元素添加到数组的末尾,并返回新数组的长度。 pop() - 从数组中移除最后一个元素,并返回该元素。 shift() - 从数组中移除第一个元素,并返回该元素。 unshift() - 将一个或多个元素添加到…...
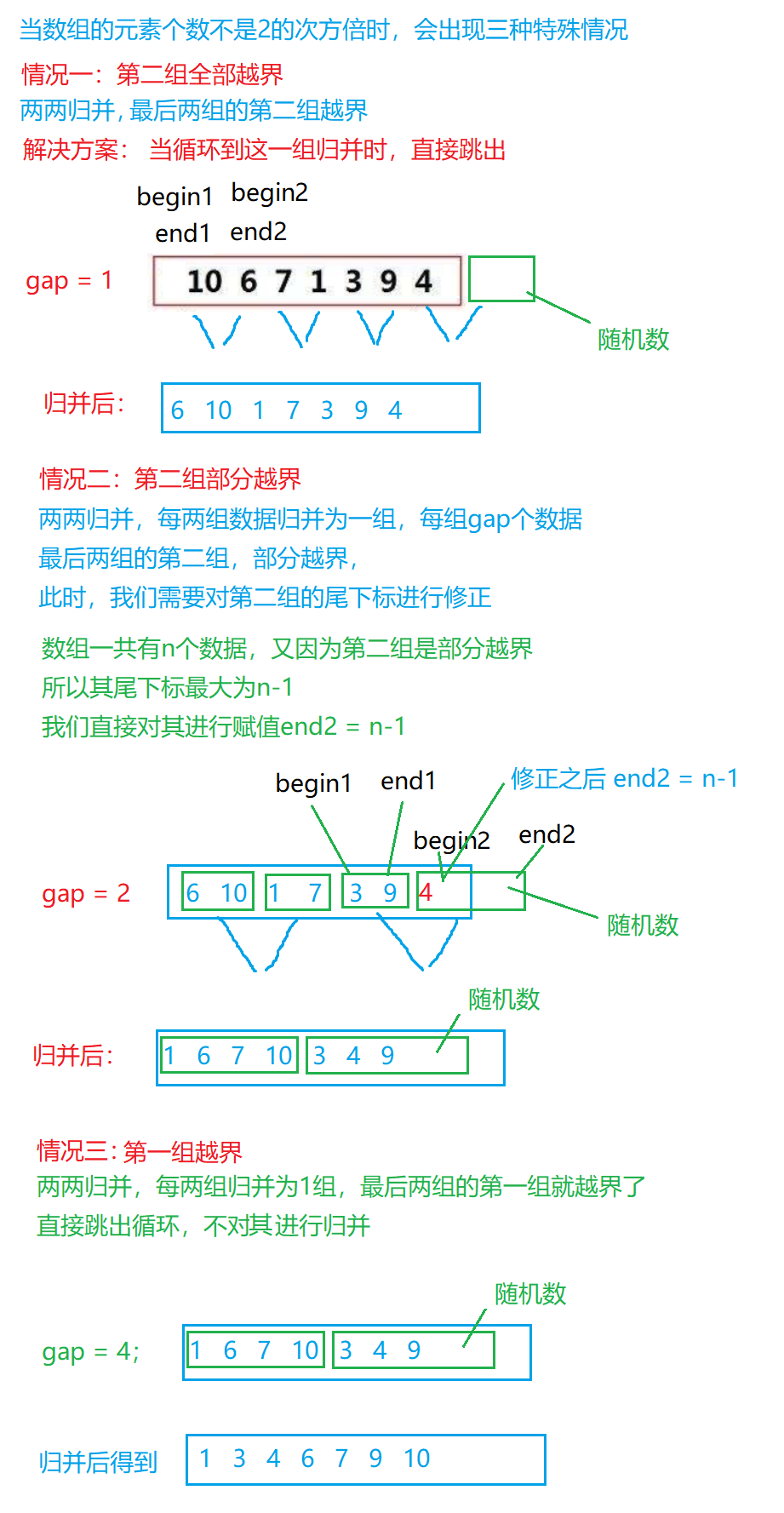
8.排序(直接插入排序、希尔排序、选择排序、堆排序、冒泡排序、快速排序、归并排序)的模拟实现
1.排序的概念及其运用 1.1排序的概念 排序:所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。 稳定性:假定在待排序的记录序列中,存在多个具有相同的关键字的记录…...
(详解)python调用另一个.py文件中的类和函数或直接运行另一个.py文件
一、同一文件夹下的调用 1.调用函数 A.py文件如下: def add(x,y):print(和为:%d%(xy))在B.py文件中调用A.py的add函数如下: import A A.add(1,2)或 from A import add add(1,2)2.调用类 A.py文件如下: class Add:def __ini…...

每日一题:修改后的最大二进制字符串
给你一个二进制字符串 binary ,它仅有 0 或者 1 组成。你可以使用下面的操作任意次对它进行修改: 操作 1 :如果二进制串包含子字符串 "00" ,你可以用 "10" 将其替换。 比方说, "00010"…...
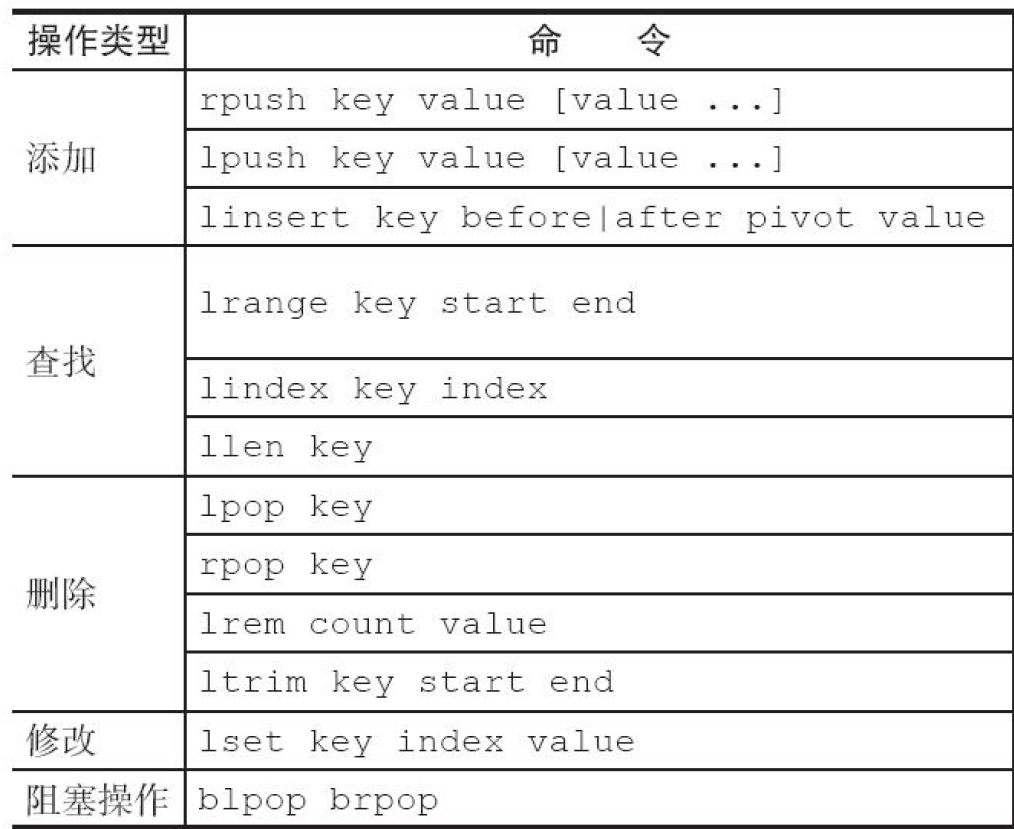
Redis 5种数据结构常用命令
文章目录 1 字符串2 哈希3 列表4 集合5 有序集合 1 字符串 命令描述set key value设置指定key的值为valueget key获取指定key的值del key [key …]删除一个或多个keymset key value [key value …]设置多个key的值mget key [key …]获取一个或多个key的值incr key将key中储存的…...

23、区间和
区间和 题目描述 假定有一个无限长的数轴,数轴上每个坐标上的数都是0。 现在,我们首先进行 n 次操作,每次操作将某一位置x上的数加c。 接下来,进行 m 次询问,每个询问包含两个整数l和r,你需要求出在区间…...
Python零基础从小白打怪升级中~~~~~~~文件和文件夹的操作 (1)
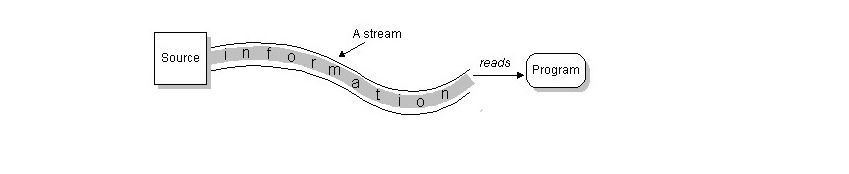
第七节:文件和文件夹的操作 一、IO流(Stream) 通过“流”的形式允许计算机程序使用相同的方式来访问不同的输入/输出源。stream是从起源(source)到接收的(sink)的有序数据。我们这里把输入/输…...

腰椎滑脱和腰间盘突出,日常护理大不同,做错反而加重病情
很多腰椎病患者,在明确诊断后,医生会叮嘱“注意日常护理”,但很多人不知道,腰椎滑脱和腰间盘突出的护理重点完全不同——如果用护理腰间盘突出的方法,去护理腰椎滑脱,不仅没有效果,还可能加重椎…...

3个高效Searchkit高亮技巧:让你的搜索结果直观又专业
3个高效Searchkit高亮技巧:让你的搜索结果直观又专业 【免费下载链接】searchkit Search UI for Elasticsearch & Opensearch. Compatible with Algolias Instantsearch and Autocomplete components. React & Vue support 项目地址: https://gitcode.com…...

EVA-02模型辅助软件测试:自动化生成测试用例与边界条件描述
EVA-02模型辅助软件测试:自动化生成测试用例与边界条件描述 如果你是一名软件测试工程师,下面这个场景你一定不陌生:产品经理递过来一份几十页的需求文档,你需要在几天内,把它拆解成成百上千条逻辑清晰、覆盖全面的测…...

ViT图像分类-中文-日常物品完整指南:4090D单卡环境配置与中文类别映射说明
ViT图像分类-中文-日常物品完整指南:4090D单卡环境配置与中文类别映射说明 想试试用AI模型来识别你手机里的照片吗?比如,拍一张桌上的水杯、键盘或者零食,让模型告诉你它是什么。今天要介绍的这个工具,就能帮你轻松实…...

别再写低效循环了:深入理解Qt隐式共享与C++17的std::as_const
别再写低效循环了:深入理解Qt隐式共享与C17的std::as_const 在代码审查中,你是否经常看到这样的写法? const QStringList& list oldList; for (auto& str : list) {// 处理字符串 }这种看似"规范"的写法,实际上…...
)
RenderDoc实战:5分钟搞定OpenGL性能瓶颈定位(附Android联调技巧)
RenderDoc实战:5分钟定位OpenGL性能瓶颈的完整指南 移动端图形开发最令人头疼的瞬间,莫过于看到测试报告上"FPS波动大"的红色标记,却不知道从哪开始排查。上周团队里新来的工程师花了三天时间逐行检查着色器代码,最后发…...

5个核心功能让网盘用户彻底解决下载速度慢的问题
5个核心功能让网盘用户彻底解决下载速度慢的问题 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 / 迅雷云盘 …...

Leather Dress Collection 企业级参数调优指南:平衡响应速度与生成质量
Leather Dress Collection 企业级参数调优指南:平衡响应速度与生成质量 如果你正在考虑把Leather Dress Collection这类大模型服务搬到公司的生产环境里,那你肯定遇到过这样的纠结:调快了,生成的内容质量好像会打折扣;…...

springboot+vue基于web的演唱会音乐会购票管理系统设计系统
目录同行可拿货,招校园代理 ,本人源头供货商系统功能模块分析技术架构设计核心业务流程安全防护措施项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作同行可拿货,招校园代理 ,本人源头供货商 系统功能模块分析 用户模块 注册登…...

终极指南:如何用btcrecover找回你忘记的比特币钱包密码 [特殊字符]️
终极指南:如何用btcrecover找回你忘记的比特币钱包密码 🗝️ 【免费下载链接】btcrecover An open source Bitcoin wallet password and seed recovery tool designed for the case where you already know most of your password/seed, but need assist…...