高精度地图导航论文汇总
文章目录
- 2021
- 基于车载激光点云的高精地图矢量化成图[J]
- 2022
- 基于高精度地图的智能车辆路径规划与跟踪控制研究[M]
- 2023
- 一种无人驾驶融合决策方案的设计与实现[M]
2021
基于车载激光点云的高精地图矢量化成图[J]
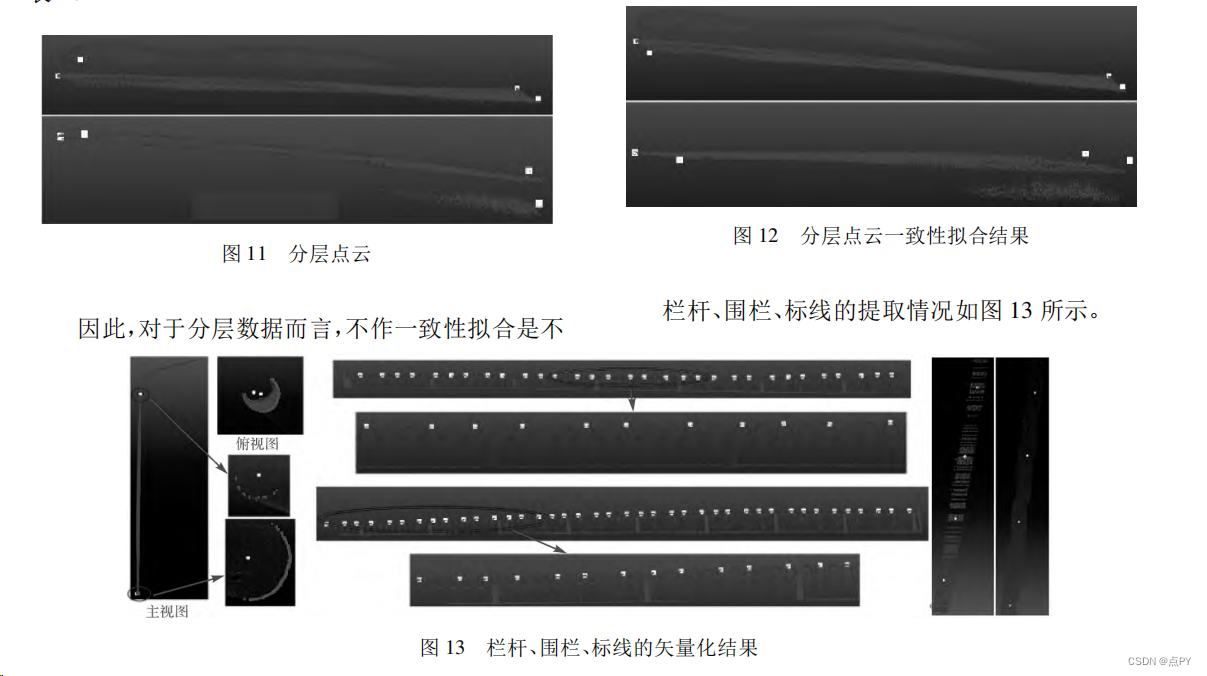
摘要: 针对车载激光点云中对各特征物提取结果后矢量化成图时的自动化问题,本文基于双方向积分法实现了边缘检测及矢量化成图,旨在保证特征物基本特征的同时,也保证点云的绝对精度。将输入的特征点云进行离群点过滤,以保证外包框算法特征点云的准确度; 将三维点云按照外包框算法投影至最优平面,为后续沿各方向积分提供输入; 利用八邻域 KD-tree 算法求出样本特征点云的均值邻域半径,依据邻域半径对各方向积分提供积分域中的微分元; 根据提供的微分元沿各方向进行积分,在该积分元内找到距平面最值的最优解; 按照积分结果构建点云索引,并根据点云特征构建模型,最终得到高精地图的矢量化点云。试验证明了该方法在处理实际问题时的可行性。
2022
基于高精度地图的智能车辆路径规划与跟踪控制研究[M]
摘要: 随着计算机及通信技术的不断进步,汽车行业也得到了飞速的发展。汽车在为人们的日常生活提供极大便利的同时,也带来了交通安全、交通拥堵和环境污染等问题。自动驾驶技术作为提高汽车行驶安全性的关键技术之一,越来越受到人们的关注。
自动驾驶技术主要包括环境感知与定位、智能决策与规划和控制执行三部分。本文主要针对自动驾驶汽车在高精度地图、路径规划以及路径跟踪控制等方面展开相关的研究,主要工作包括:
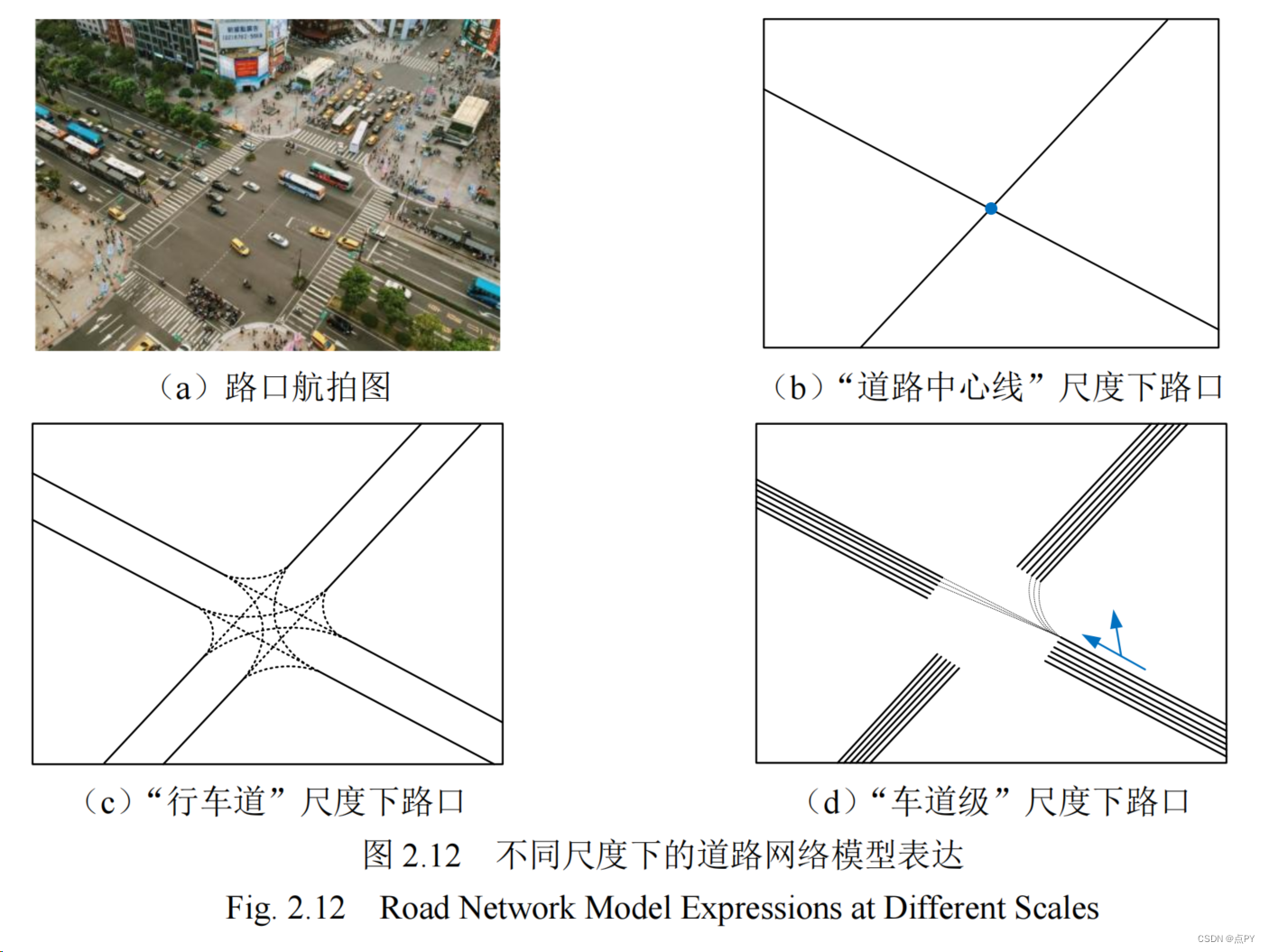
首先建立了适用于智能车辆的车道级高精度地图。为满足自动驾驶车辆对定位精度的需求,通过对 GPS 定位系统和惯性导航系统的组成、坐标转换及工作原理等进行了相关的阐述,并最终采用 RTK-GPS/INS 组合导航定位系统作为本文的高精度定位系统,并搭配千寻位置的差分服务使定位精度达到厘米级。选择车道级的道路网络模型并通过对校园道路进行数据采集,建立了由车道中心线节点构成的车道级高精度地图网络模型,并通过三次样条曲线对车道中心线路径采集点进行插值。
其次通过对建立的车道级高精度地图网络模型进行道路拓扑关系的抽象化表达,将实验采集区域的地图数据抽象为具有 64 个顶点和 78 条边的有向图,并将车道的长度作为边的权值,通过在 MATLAB 中编写相关的程序将抽象化后的有向图数据以邻接矩阵的方式储存起来。通过选择 Dijkstra 算法作为本文的最短路径规划算法,分别选择校园东门和西门作为路径规划的起点和终点,进行了最短路径规划,得到了从校园东门到西门的最短路径。
然后建立了车辆动力学模型和轮胎模型,设计了基于模型预测控制算法的路径跟踪控制器,搭建了 Carsim 与 Simulink 联合仿真平台并通过选择双移线轨迹来验证跟踪算法的可行性,结果表明该算法能够达到跟踪控制的目的,跟踪误差较小。
最后通过实车实验的方式验证了本文所建立的高精度地图以及路径跟踪控制算法的实用性。通过选取规划的最短路径中包含的部分路段作为实车实验测试路段,实验结果表明:路径跟踪控制器能够使被控车辆对所选取的测试路段的参考车道中心线轨迹进行有效的跟踪,跟踪过程中最大误差为 0.35m。
2023
一种无人驾驶融合决策方案的设计与实现[M]
摘要: 随着传感器技术的不断发展和计算机对环境的感知能力的增强,以及深度学习、强化学习等科学技术的突破,无人驾驶技术成为了一个备受关注的领域。在这种大环境下,无人驾驶技术已经被推向了新的高潮。当前无人驾驶主要分为两大阵营,一是依靠传感器、计算平台不断提高车辆自身的识别检测能力,称为单车智能驾驶,另一类是依靠高带宽低延时的通信技术和增加路测的辅助设备来实现,称为网联车智能驾驶。前者的主要问题是单车能耗和成本高,观测不充分,后者的问题是通信延时高。同时二者都存在地图精度低、定位精度低频率慢等缺点。
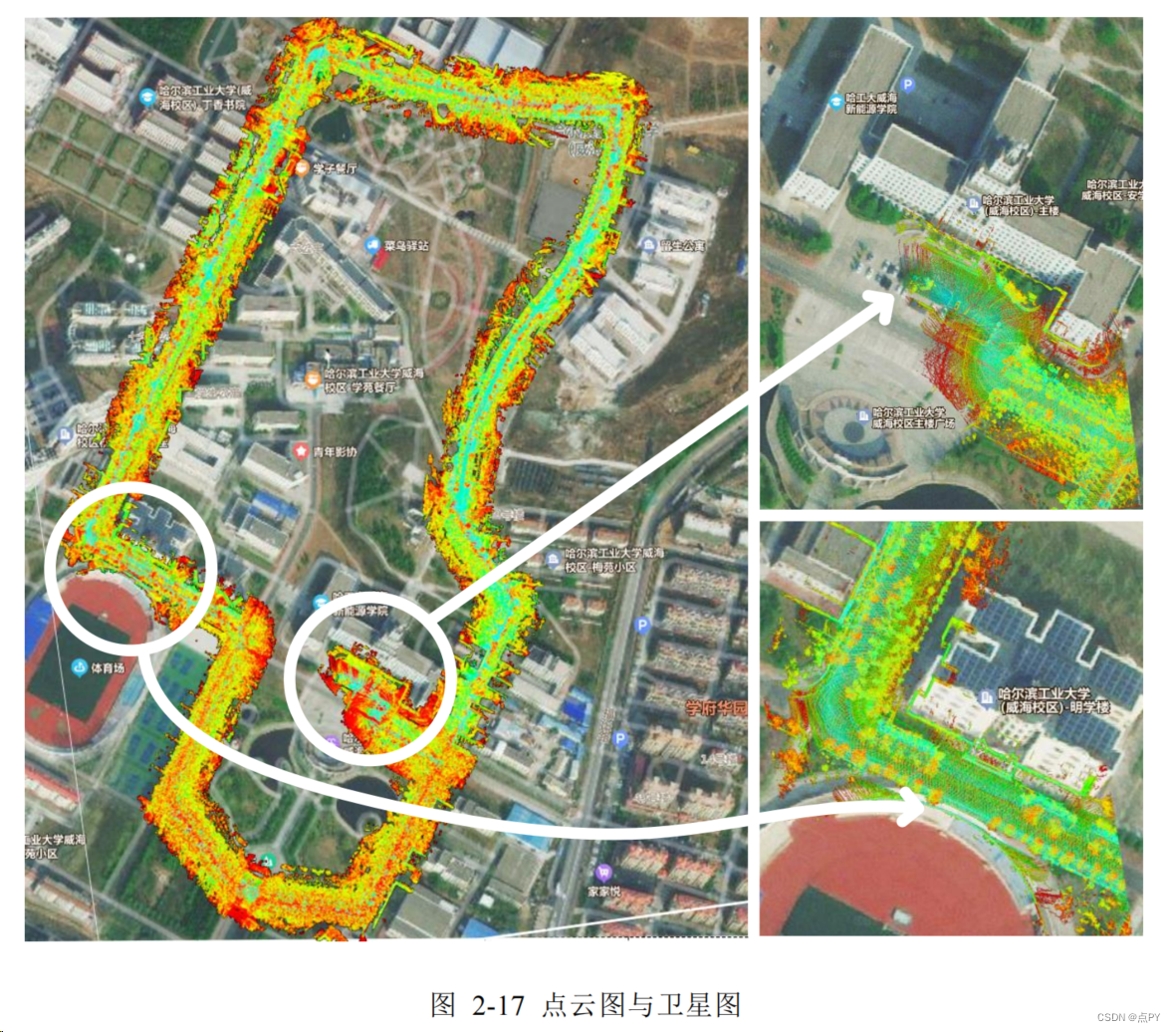
针对无人驾驶点云地图构建难度大、精度低以及在大地图中做精细定位困难的问题,本文分析了运动导致匹配点偏移的现象,提出了运动补偿算法,并在 ROS 操作系统中进行了实现和测试。结果表明,对比主流的建图算法 LeGOLOAM,本文提出的算法在公开数据集 KITTI 上精度提高了 30%以上。本文分析了地图结构和传感器自身的特性,提出了高频高精度的重定位算法。利用全
球卫星导航系统(GPS)和地图结构做全局的重定位,利用惯性测量单元(IMU)和激光雷达做实时局部定位,并在实际环境中进行了测试。结果表明,本文提出的重定位系统定位精度在厘米级,定位频率在百赫兹级,满足自动驾驶要求。
针对单车智能驾驶能耗高、成本昂贵和网联车在危险情况反应慢等问题,本文提出构造一个分布式的融合决策系统,设计了三个具有实际意义的测试场景来分析和验证,分别是测试信号延时和能耗、成本节省的巡航场景、测试观测不一致性的红绿灯路口通行场景,以及测试危险情况响应速度的行人横穿马路的场景。实验结果表明,巡航误差在厘米级,满足自动驾驶要求;验证了危险情况响应速度较网联车智能驾驶快了 20ms 以上;验证了融合决策系统能在观测不一致的情况下做出最安全的决策;本系统对比主流的无人驾驶系统 RT6在能耗方面节省了 74%以上、成本方面节省了 90%以上。
本文提出的融合决策系统结合了单车智能驾驶和网联车智能驾驶各自的优点,在完成无人驾驶任务的要求下能耗和成本大幅降低,响应速度大幅提升。提出运动补偿原理优化了无人驾驶地图构建算法,根据地图结构和传感器特性实现了在大地图中精细定位的重定位算法。
相关文章:
高精度地图导航论文汇总
文章目录 2021基于车载激光点云的高精地图矢量化成图[J] 2022基于高精度地图的智能车辆路径规划与跟踪控制研究[M] 2023一种无人驾驶融合决策方案的设计与实现[M] 2021 基于车载激光点云的高精地图矢量化成图[J] 摘要: 针对车载激光点云中对各特征物提取结果后矢量…...

【域适应】基于域分离网络的MNIST数据10分类典型方法实现
关于 大规模数据收集和注释的成本通常使得将机器学习算法应用于新任务或数据集变得异常昂贵。规避这一成本的一种方法是在合成数据上训练模型,其中自动提供注释。尽管它们很有吸引力,但此类模型通常无法从合成图像推广到真实图像,因此需要域…...

从零实现诗词GPT大模型:pytorch框架介绍
专栏规划: https://qibin.blog.csdn.net/article/details/137728228 因为咱们本系列文章主要基于深度学习框架pytorch进行,所以在正式开始之前,现对pytorch框架进行一个简单的介绍,主要面对深度学习或者pytorch还不熟悉的朋友。 一、安装pytorch 这一步很简单,主要通过p…...

[目标检测] OCR: 文字检测、文字识别、text spotter
概述 OCR技术存在两个步骤:文字检测和文字识别,而end-to-end完成这两个步骤的方法就是text spotter。 文字检测数据集摘要 daaset语言体量特色MTWI中英文20k源于网络图像,主要由合成图像,产品描述,网络广告(淘宝)MS…...

Windows环境下删除MySQL
文章目录 一、关闭MySQL服务1、winR打开运行,输入services.msc回车2、服务里找到MySQL并停止 二、卸载MySQL软件1、打开控制模板--卸载程序--卸载MySQL相关的所有组件 三、删除MySQL在物理硬盘上的所有文件1、删除MySQL的安装目录(默认在C盘下的Program …...

uniapp:uview-plus的一些记录
customStyle 并不是所有的组件都有customStyle属性来设置自定义属性,有的还是需要通过::v-deep来修改内置样式 form表单 labelStyle 需要的是一个对象 :labelStyle"{color: #333333,fontSize: 32rpx,fontWeight: 500}"dateTimePicker选择器设置默认值…...

OLTP 与 OLAP 系统说明对比和大数据经典架构 Lambda 和 Kappa 说明对比——解读大数据架构(五)
文章目录 前言OLTP 和 OLAPSMP 和 MPPlambda 架构Kappa 架构 前言 本文我们将研究不同类型的大数据架构设计,将讨论 OLTP 和 OLAP 的系统设计,以及有效处理数据的策略包括 SMP 和 MPP 等概念。然后我们将了解经典的 Lambda 架构和 Kappa 架构。 OLTP …...

步骤大全:网站建设3个基本流程详解
一.领取一个免费域名和SSL证书,和CDN 1.打开网站链接:https://www.rainyun.com/z22_ 2.在网站主页上,您会看到一个"登陆/注册"的选项。 3.点击"登陆/注册",然后选择"微信登录"选项。 4.使用您的…...
利用Sentinel解决雪崩问题(二)隔离和降级
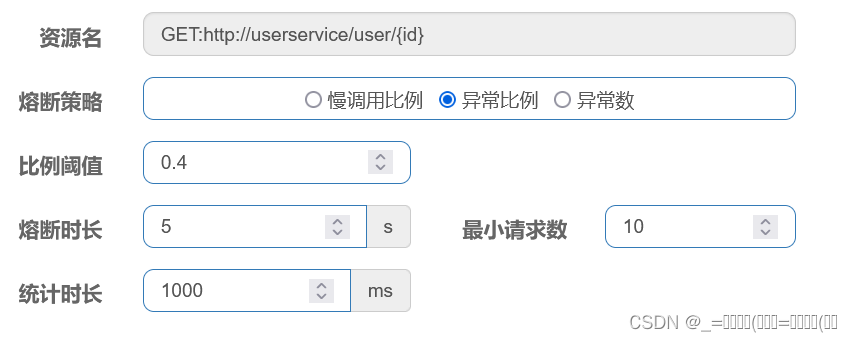
前言: 虽然限流可以尽量避免因高并发而引起的服务故障,但服务还会因为其它原因而故障。而要将这些故障控制在一定范围避免雪崩,就要靠线程隔离(舱壁模式)和熔断降级手段了,不管是线程隔离还是熔断降级,都是对客户端(调…...

基于springboot的房产销售系统源码数据库
基于springboot的房产销售系统源码数据库 摘 要 随着科学技术的飞速发展,各行各业都在努力与现代先进技术接轨,通过科技手段提高自身的优势;对于房产销售系统当然也不能排除在外,随着网络技术的不断成熟,带动了房产…...

【MATLAB】基于Wi-Fi指纹匹配的室内定位-仿真获取WiFi RSSI数据(附代码)
基于Wi-Fi指纹匹配的室内定位-仿真获取WiFi RSSI数据 WiFi指纹匹配是室内定位最为基础和常见的研究,但是WiFi指纹的采集可以称得上是labor-intensive和time-consuming。现在,给大家分享一下我们课题组之前在做WiFi指纹定位时的基于射线跟踪技术仿真WiFi…...

深圳晶彩智能ESP32-3248S035R使用LovyanGFX实现手写板
深圳晶彩智能ESP32-3248S035R介绍 深圳晶彩智能出品ESP32-3248S035R为3.5寸彩色屏采用分辨率480x320彩色液晶屏,驱动芯片是ST7796。板载乐鑫公司出品ESP-WROOM-32,Flash 4M。型号尾部“R”标识电阻膜的感压式触摸屏,驱动芯片是XPT2046。 Lo…...
【Spring Boot】深入解密Spring Boot日志:最佳实践与策略解析
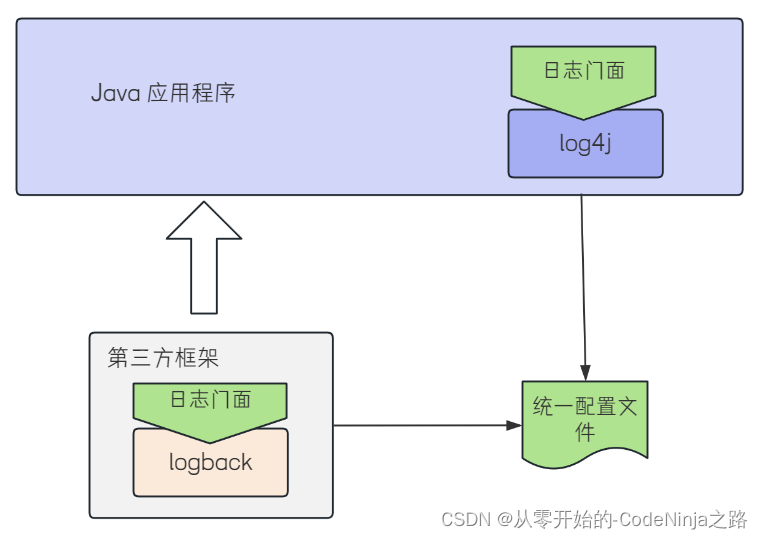
💓 博客主页:从零开始的-CodeNinja之路 ⏩ 收录文章:【Spring Boot】深入解密Spring Boot日志:最佳实践与策略解析 🎉欢迎大家点赞👍评论📝收藏⭐文章 目录 Spring Boot 日志一. 日志的概念?…...
ISTQB选择国内版,还是国际版呢
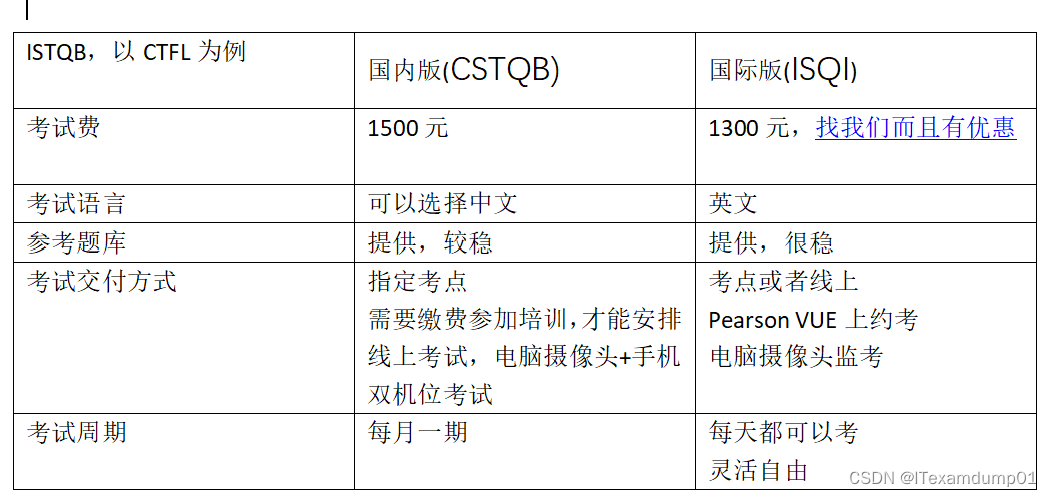
1, ISTQB简介 ISTQB(International Software Testing Qualifications Board)是一个国际软件测试资格认证机构,旨在提供一个统一的软件测试认证标准。ISTQB成立于2002年,是非盈利性的组织,由世界各地的国家或地区软件测…...

头歌-机器学习 第11次实验 softmax回归
第1关:softmax回归原理 任务描述 本关任务:使用Python实现softmax函数。 相关知识 为了完成本关任务,你需要掌握:1.softmax回归原理,2.softmax函数。 softmax回归原理 与逻辑回归一样,softmax回归同样…...
Qt for MCUs 2.7正式发布
本文翻译自:Qt for MCUs 2.7 released 原文作者:Qt Group高级产品经理Yoann Lopes 翻译:Macsen Wang Qt for MCUs的新版本已发布,为Qt Quick Ultralite引擎带来了新功能,增加了更多MCU平台的支持,并且我们…...

共享IP和独享IP如何选择,两者有何区别?
有跨境用户在选择共享IP和独享IP时会有疑问,不知道该如何进行选择,共享IP和独享IP各有其特点和应用场景,选择哪种方式主要取决于具体需求和预算。以下是对两者的详细比较: 首先两者的主要区别在于使用方式和安全性:共…...

文心一言VSchatGPT4
文心一言和GPT-4各有优势,具体表现在不同的测试场景下。 在某些测试场景中心一言的表现优于GPT-4,例如在故事的完整度和情节吸引力方面,文心一言表现得更加符合指令,情节更吸引人。这可能得益于其模型在训练时对中文语境的深入理…...
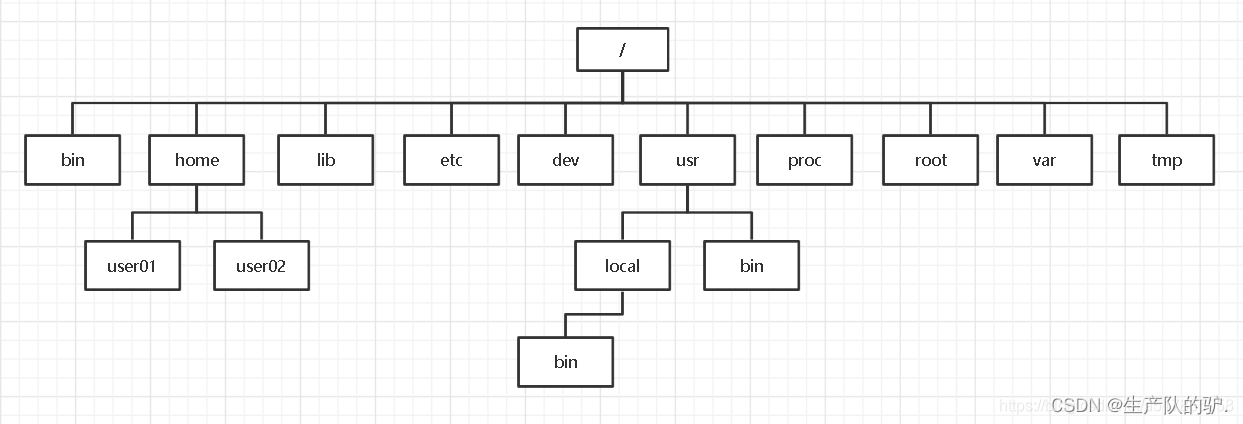
Linux 目录结构与基础查看命令
介绍 目录结构如下 /bin:存放着用户最经常使用的二进制可执行命令,如cp、ls、cat等。这些命令是系统管理员和普通用户进行日常操作所必需的。 /boot:存放启动系统使用的一些核心文件,如引导加载器(bootstrap loader…...
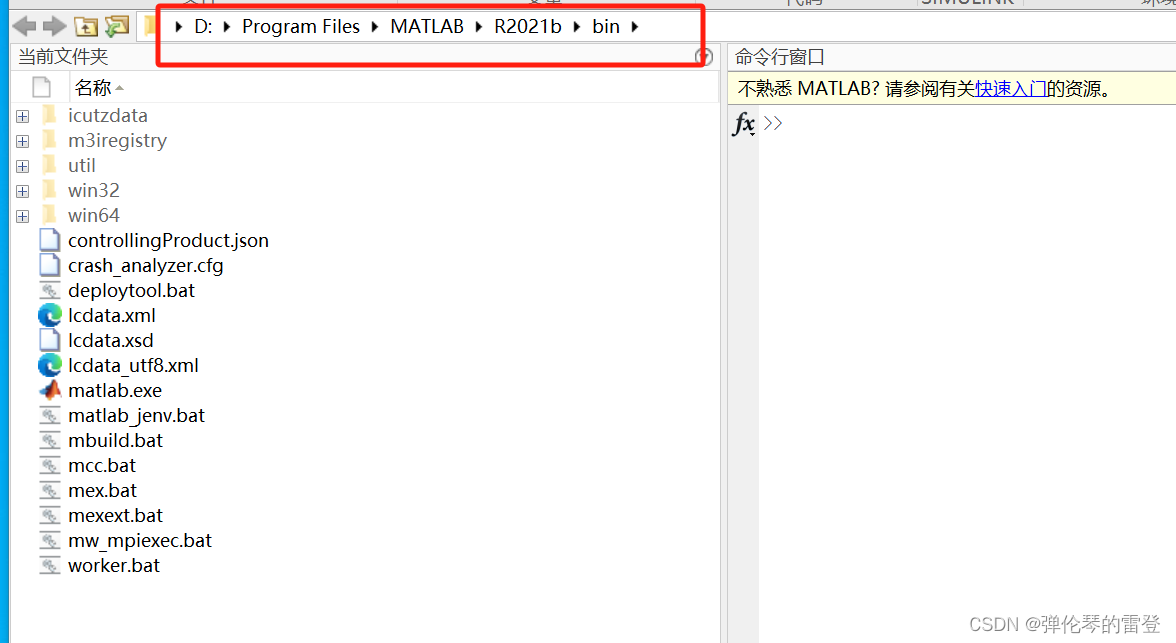
【matlab】如何解决打开缓慢问题(如何让matlab在十几秒内打开)
【matlab】如何解决打开缓慢问题(如何让matlab在十几秒内打开) 找到我们解压缩时Crack中的license_standalone.lic文件,将其拷贝 在安装matlab的路径下新建一个文件,粘贴上面的license_standalone.lic文件 在桌面鼠标移动到matl…...

解决Claude Code频繁封号与Token不足的替代接入方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code频繁封号与Token不足的替代接入方案 1. 场景与核心思路 对于依赖Claude Code进行编程辅助的开发者而言࿰…...

基于MCP协议构建AI知识库:Alexandria项目部署与核心工作流解析
1. 项目概述:让AI拥有自己的“亚历山大图书馆”如果你和我一样,长期与各种AI助手(比如Claude、Cursor、Codex)打交道,肯定会遇到一个头疼的问题:知识无法沉淀。今天你花半小时教会AI助手某个项目的架构细节…...
,让开源检索进入“所想即所得”时代)
别再Ctrl+F GitHub了!Perplexity高级提示词工程(含18个已验证模板),让开源检索进入“所想即所得”时代
更多请点击: https://intelliparadigm.com 第一章:Perplexity GitHub资源检索的范式革命 从关键词匹配到语义理解的跃迁 传统 GitHub 搜索依赖精确的仓库名、文件路径或正则表达式,而 Perplexity 引入的 LLM 驱动检索将自然语言查询&#x…...

超越官方Demo:如何用COCO预训练权重快速微调Mask R-CNN处理你的自定义数据
超越官方Demo:如何用COCO预训练权重快速微调Mask R-CNN处理你的自定义数据 当你在工业质检、医疗影像分析或遥感图像处理中遇到需要精确目标分割的场景时,从头训练一个Mask R-CNN模型无疑是奢侈的。COCO数据集预训练权重就像一位经验丰富的"视觉专家…...

Nevis‘22基准:评估持续学习模型的计算效率与知识迁移能力
1. 项目概述:为什么我们需要一个全新的终身学习基准?在计算机视觉乃至整个机器学习领域,我们正面临一个日益尖锐的矛盾:一方面,我们希望模型能够像人类一样,在漫长的时间里持续学习新知识,不断进…...

从JLink驱动安装失败,聊聊老旧Win7系统下嵌入式工具链的“版本锁定”现象
从JLink驱动安装失败看嵌入式工具链的版本锁定困境 当你在Windows 7系统上尝试安装最新版JLink驱动时,那个顽固的黄色感叹号是否曾让你抓狂?这看似简单的驱动问题背后,隐藏着一个困扰嵌入式开发领域多年的系统性难题——工具链的版本锁定现象…...

避坑指南:NRF52832低功耗调试,为什么你的电流下不去?
NRF52832低功耗调试实战:从百微安到个位数的终极指南 当你满怀期待地将NRF52832的低功耗模式配置完毕,却发现实际电流依然高达几十甚至上百微安时,那种挫败感我深有体会。这不是简单的数据手册参数未达标问题,而往往是一系列隐蔽陷…...

探索Windows平台智能PPT演示计时器的实现与实践
探索Windows平台智能PPT演示计时器的实现与实践 【免费下载链接】ppttimer 一个简易的 PPT 计时器 项目地址: https://gitcode.com/gh_mirrors/pp/ppttimer 在技术分享或学术汇报场景中,时间管理常常成为影响演示效果的关键因素。演讲者需要同时关注内容表达…...
)
Xilinx VCU方案深度体验:除了低延时,开发者还需要面对这些挑战(GStreamer/FPGA/稳定性)
Xilinx VCU方案实战解析:低延时光环下的工程化挑战 在专业视频处理领域,低延时编解码一直是皇冠上的明珠。Xilinx Zynq UltraScale MPSoC凭借其VCU硬核确实交出了一份漂亮的参数答卷——4K60帧H.265编解码仅2帧延时的成绩单。但当我们真正将其引入工业视…...

为什么92%的团队用错Gemini做Slides?——基于17家SaaS公司实测数据的生成效率断层分析
更多请点击: https://intelliparadigm.com 第一章:Gemini生成Slides的底层机制与能力边界 Gemini 生成幻灯片(Slides)并非简单地将文本转为 PPT 页面,而是依托多模态大模型对语义结构、视觉层级与演示逻辑的联合建模。…...