使用moveit控制机械臂
在这篇博客中,我们将详细探讨如何利用Python和Robot Operating System(ROS)配合MoveIt! 控制机械臂执行精确的抓取任务。机械臂技术在工业自动化、医疗服务以及研究领域扮演着越来越关键的角色。本文将通过介绍安装必要的软件、编写控制脚本以及详细解释每段代码的作用,逐步引导您完成机械臂的配置和操作。
一、 开发环境配置
在开始编写控制机械臂的脚本之前,确保您的系统已经安装了ROS,特别是MoveIt! 插件,后者是专为机械臂路径规划而设计的。此外,`moveit_commander`库提供了Python接口,用于与MoveIt进行交互。安装这些组件的步骤通常包括以下命令:
sudo apt-get install ros-noetic-moveit
这些工具和库的安装是实现机械臂控制的基础,确保所有的依赖都正确安装将帮助我们避免在后续开发中遇到不必要的问题。接下来,我们将通过编写Python脚本来实际控制机械臂移动到指定的抓取位置。
二、MoveIt! 基本原理与应用
MoveIt! 是一款开源的机器人运动规划框架,专为机器人的路径规划、操作、3D感知、运动学、控制和导航等功能而设计。它允许开发者通过简单的API与复杂的机械臂模型进行交互。`MoveGroupCommander`是MoveIt! 中用于机械臂组(Arm Group)控制的主要类,可以用来设置目标位置、规划并执行路径。
三、初始化和设置机械臂组
在编写一个机械臂控制程序时,了解如何初始化和设置基本环境是非常关键的。以下是详细的步骤和它们的作用,以帮助您自行完成这些操作:
1、导入依赖库:
import sys
import rospy
import moveit_commander
import moveit_msgs.msg
import geometry_msgs.msg
sys:此库用于访问与Python解释器紧密相关的变量和函数,特别是在处理ROS节点的参数时非常有用。
rospy:这是ROS的Python客户端库,我们将用它来初始化和创建ROS节点。
moveit_commander:这是MoveIt的Python接口,允许我们控制机械臂。
moveit_msgs.msg 和 geometry_msgs.msg:包含ROS消息类型的库,这些类型在机械臂的操作和消息传递中至关重要。
2、函数定义:
def move_arm_to_grasp_target():
move_arm_to_grasp_target():定义了一个主要的函数,用来控制机械臂的移动和抓取任务。
3、初始化moveit_commander和ROS节点:
使用 moveit_commander.roscpp_initialize(sys.argv) 来初始化MoveIt。这里的 sys.argv 包含了命令行参数,它们被传递给MoveIt的初始化函数,以便为机械臂的控制做好准备。
rospy.init_node('move_arm_to_grasp', anonymous=True):通过这条命令初始化一个ROS节点,节点名被设定为'move_arm_to_grasp'。使用 anonymous=True 确保每次启动程序时节点的名称都是唯一的,从而避免节点名称冲突。
4、机械臂组初始化:
首先定义 group_name = "arm",这里的 "arm" 应替换为实际机械臂在ROS中配置的组名。机械臂组是由一个或多个机械关节和连杆组成的集合,我们可以通过它来集体控制机械臂。
通过 group = moveit_commander.MoveGroupCommander(group_name) 创建一个 MoveGroupCommander 对象。这个对象是MoveIt中用于控制机械臂特定组的接口,允许我们对机械臂进行精确的操作,如移动到指定位置或执行路径规划等。
四、 目标位置和姿态的设定
在机械臂控制的过程中,设定精确的目标位置和姿态是实现精确操作的关键步骤。在我们的设置中,我们使用 `Pose` 消息类型来定义机械臂的目标位置和姿态,如下所示:
from geometry_msgs.msg import Pose
target_pose = Pose()
target_pose.position.x = 0.12 # 设置目标位置的X坐标
target_pose.position.y = 0.41 # 设置目标位置的Y坐标
target_pose.position.z = 0.44 # 设置目标位置的Z坐标
target_pose.orientation.w = 1.0 # 设置目标姿态的四元数W分量
位置设置:`target_pose.position.x = 0.12`, `target_pose.position.y = 0.41`, 和 `target_pose.position.z = 0.44` 分别设置了机械臂末端执行器的X, Y, 和 Z坐标。这些坐标指定了机械臂应到达的三维空间位置。
姿态设置:`target_pose.orientation.w = 1.0` 定义了机械臂的姿态,使用四元数表示。这里设置的是一个无旋转的状态,意味着机械臂在执行任务时朝向不变。
这样的设置确保机械臂可以精确地按照预定的路径移动到特定位置,并且在达到目的地时保持正确的姿态。这对于实现机械臂的精确抓取和搬运任务至关重要,尤其是在需要高精度的工业应用和复杂操作的研究中。在实际应用中,这些值需要根据具体的任务需求和环境条件进行调整以适应不同的操作场景。
五、 路径规划和执行
一旦目标位置和姿态被设定,机械臂控制程序的下一步是进行路径规划并执行相应的移动。这一过程是通过以下代码段实现的:
group.set_pose_target(target_pose)
plan = group.go(wait=True)
group.stop() # 停止所有剩余的运动
group.clear_pose_targets()
设定目标位置:`group.set_pose_target(target_pose)` 这一命令将之前定义的目标位置和姿态设置为当前机械臂组的目标,为接下来的路径规划做准备。
执行路径规划:`plan = group.go(wait=True)` 这一命令负责执行路径规划。参数 `wait=True` 表示该命令将阻塞其他操作,直到机械臂移动到目标位置或操作失败。
停止运动:`group.stop()` 确保机械臂停止所有当前的运动。这一步是为了安全性和防止执行未完成时的意外动作。
清除目标设置:`group.clear_pose_targets()` 清除当前设置的所有目标位置。这样做可以防止未来的操作受到之前未清除设置的影响。
这些步骤确保机械臂可以安全、精确地按照预定的路径进行操作。在实际应用中,这一流程对于保证机械臂操作的准确性和重复性至关重要,特别是在需要高精度的工业自动化或复杂的科研任务中。
六、清理和资源释放
最后,我们需要关闭与MoveIt的连接并清理资源:
moveit_commander.roscpp_shutdown()
希望本文能为你的机器人编程之旅提供帮助和启发。
整体代码
#!/usr/bin/env python3.8# _*_ coding: utf-8 _*_# 导入依赖import sysimport rospyimport moveit_commanderimport moveit_msgs.msgimport geometry_msgs.msgdef move_arm_to_grasp_target():# 初始化moveit_commander和rospy节点moveit_commander.roscpp_initialize(sys.argv)rospy.init_node('move_arm_to_grasp', anonymous=True)# 初始化需要使用的对象group_name = "arm" # 替换为你的机械臂group名称group = moveit_commander.MoveGroupCommander(group_name)# 设置目标位置target_pose = geometry_msgs.msg.Pose()target_pose.position.x = 0.12 # 请根据实际情况设置目标位置的x坐标target_pose.position.y = 0.41 # 请根据实际情况设置目标位置的y坐标target_pose.position.z = 0.44 # 请根据实际情况设置目标位置的z坐标# 设置目标姿态# target_pose.orientation.w =# ... 请根据实际情况设置目标姿态# 设置目标姿态target_pose.orientation.x = 0.0 # 替换为目标姿态的x分量target_pose.orientation.y = 0.0 # 替换为目标姿态的y分量target_pose.orientation.z = 0.0 # 替换为目标姿态的z分量target_pose.orientation.w = 1.0 # 替换为目标姿态的w分量rospy.loginfo(target_pose)group.set_pose_target(target_pose)# 规划并执行路径plan = group.go(wait=True)group.stop() # 停止所有剩余的运动group.clear_pose_targets()# 关闭moveitmoveit_commander.roscpp_shutdown()if __name__ == '__main__':try:move_arm_to_grasp_target()except rospy.ROSInterruptException:
相关文章:

使用moveit控制机械臂
在这篇博客中,我们将详细探讨如何利用Python和Robot Operating System(ROS)配合MoveIt! 控制机械臂执行精确的抓取任务。机械臂技术在工业自动化、医疗服务以及研究领域扮演着越来越关键的角色。本文将通过介绍安装必要的软件、编写控制脚本以…...
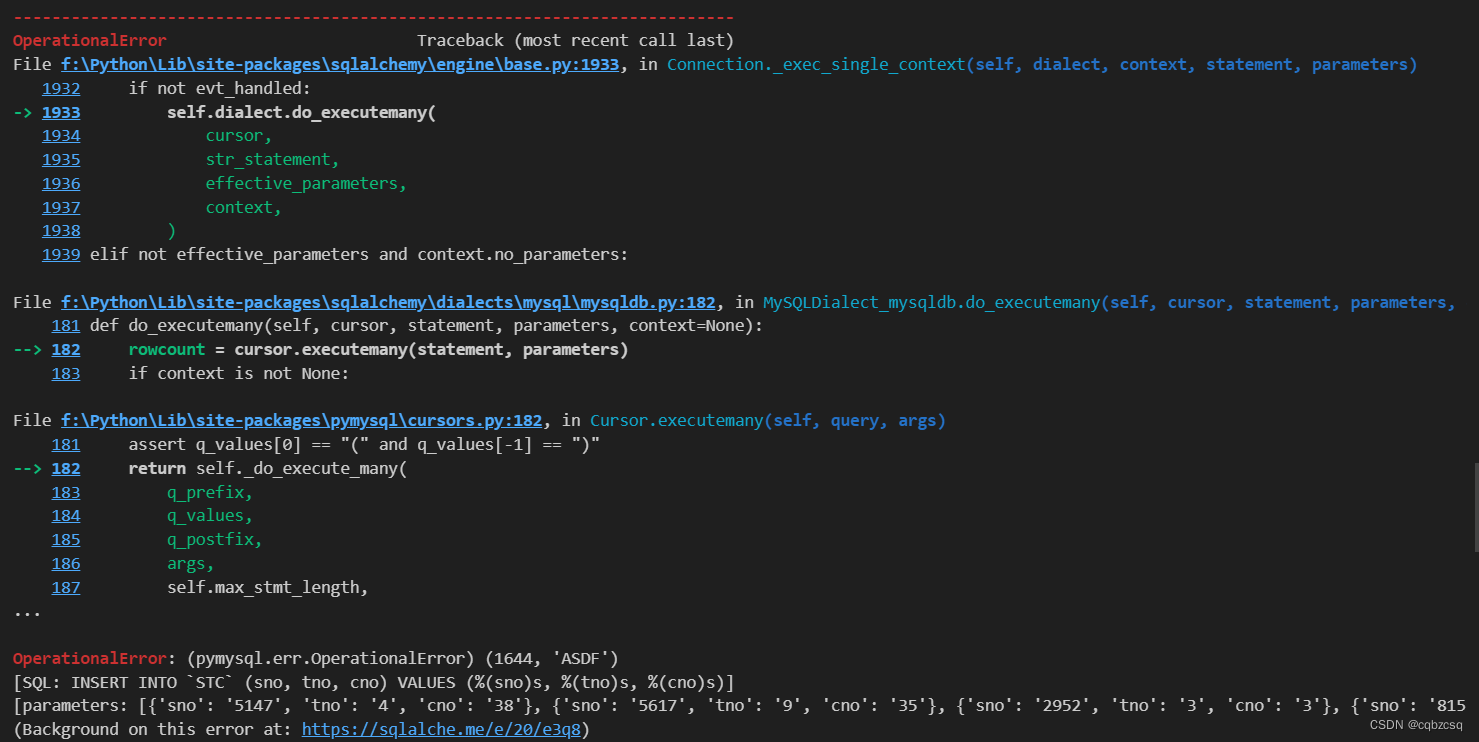
Mysql报错红温集锦(一)(ipynb配置、pymysql登录、密码带@、to_sql如何加速、触发器SIGNAL阻止插入数据)
一、jupyter notebook无法使用%sql来添加sql代码 可能原因: 1、没装jupyter和notebook库、没装ipython-sql库 pip install jupyter notebook ipython-sql 另外如果是vscode的话还需要安装一些相关的插件 2、没load_ext %load_ext sql 3、没正确的登录到mysql…...

ASP.NET Core SignalR 配置与集成测试究极指南
这篇文章也可以在我的博客中查看 前言 哥们最近都在埋头苦干,沉默是金,有一段时间没更新博客了。然而今儿SignalR集成测试实属是给我整破防了。虽说SignalR是.NET官方维护的实时通信库,已经开发了有十几年,甚至已经编入至了core…...
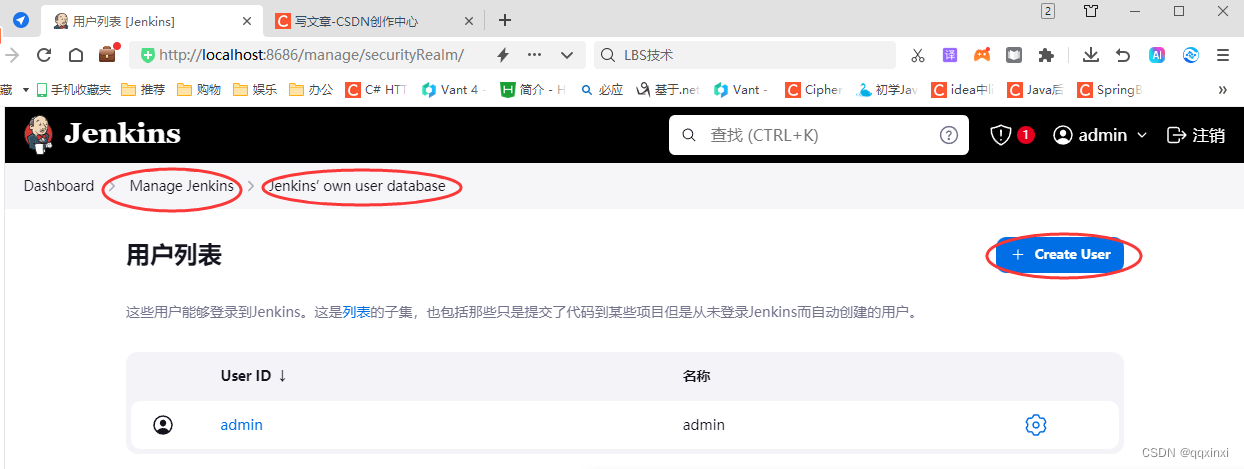
JENKINS 安装,学习运维从这里开始
Download and deployJenkins – an open source automation server which enables developers around the world to reliably build, test, and deploy their softwarehttps://www.jenkins.io/download/首先点击上面。下载Jenkins 为了学习,从windows开始&#x…...

大语言模型从Scaling Laws到MoE
1、摩尔定律和伸缩法则 摩尔定律(Moores law)是由英特尔(Intel)创始人之一戈登摩尔提出的。其内容为:集成电路上可容纳的晶体管数目,约每隔两年便会增加一倍;而经常被引用的“18个月”…...
四级英语翻译随堂笔记
降维表达:中译英,英译英 没有强调主语,没有说明主语:用被动 但如果实在不行,再增添主语 不会就不翻译,不要乱翻译 以xxx为背景:against the backdrop of the xxx eg:against the backdrop of…...

Nacos支持的配置格式及其在微服务架构中的应用
今天,我想和大家探讨一下Nacos这一重要的微服务组件,特别是它所支持的配置格式以及这些格式在微服务架构中的应用。 一、Nacos简介 Nacos是阿里巴巴开源的一个更易于构建云原生应用的动态服务发现、配置管理和服务管理平台。它提供了服务发现、配置管理…...
-OD统一考试(C卷D卷))
2024年华为OD机试真题-小明找位置-(C++)-OD统一考试(C卷D卷)
题目描述: 小朋友出操,按学号从小到大排成一列;小明来迟了,请你给小明出个主意,让他尽快找到他应该排的位置。 算法复杂度要求不高于nLog(n);学号为整数类型,队列规模<=10000; 输入描述: 1、第一行:输入已排成队列的小朋友的学号(正整数),以”,”隔开; …...
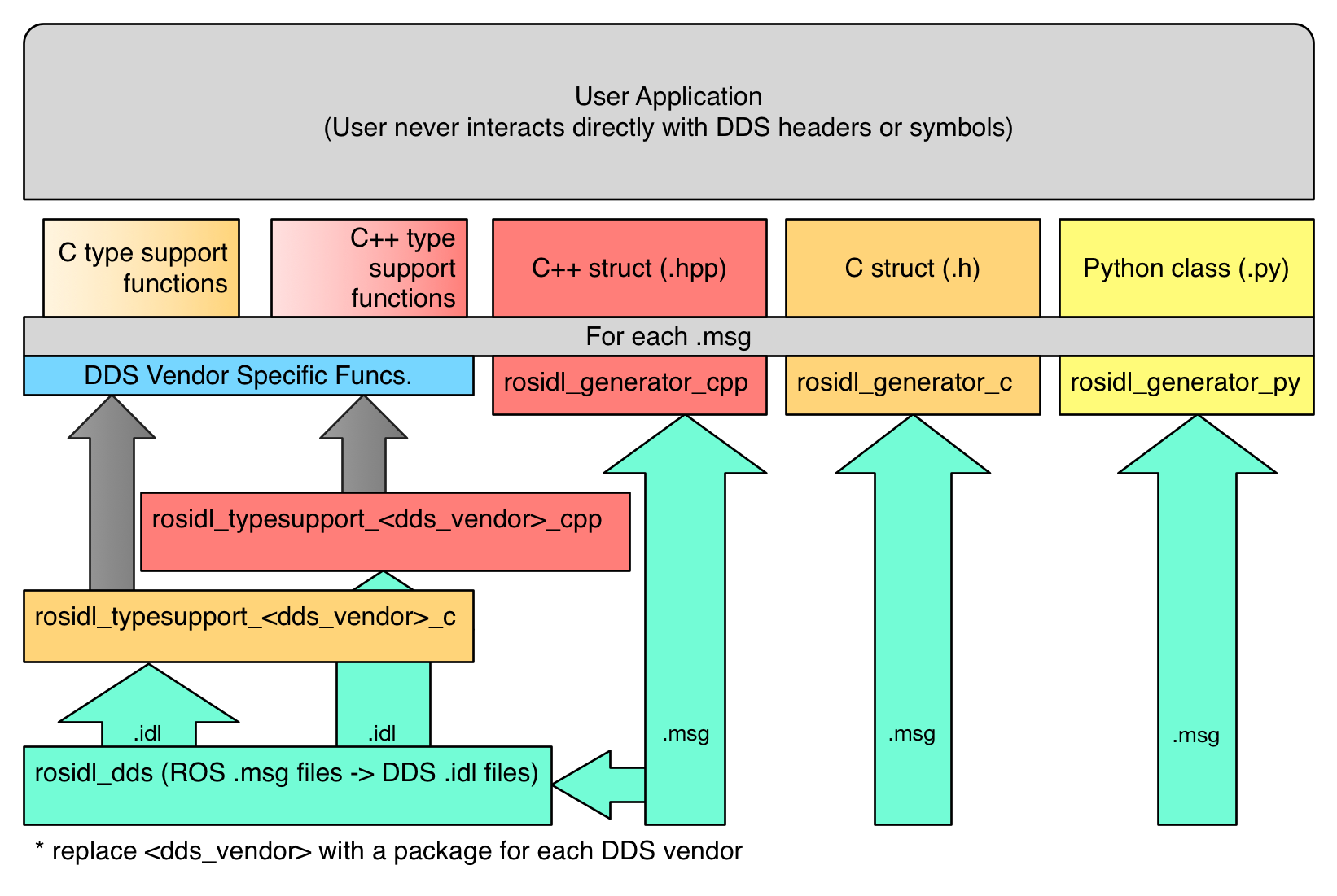
机器人系统ros2内部接口介绍
内部 ROS 接口是公共 C API ,供创建客户端库或添加新的底层中间件的开发人员使用,但不适合典型 ROS 用户使用。 ROS客户端库提供大多数 ROS 用户熟悉的面向用户的API,并且可能采用多种编程语言。 内部API架构概述 内部接口主要有两个&#x…...

跟随Facebook的足迹:社交媒体背后的探索之旅
在当今数字化时代,社交媒体已经成为了人们日常生活中不可或缺的一部分。而在这庞大的社交媒体网络中,Facebook作为其中的巨头,一直在引领着潮流。从创立之初的一个大学社交网络到如今的全球性平台,Facebook的发展历程承载了无数故…...

面试题分享之Java并发篇
注意:文章若有错误的地方,欢迎评论区里面指正 🍭 系列文章目录 面试题分享之Java集合篇(三) 面试题分享之Java集合篇(二) 面试题分享之Java基础篇(三) 前言 今天给小…...

bpmn-js 多实例配置MultiInstanceLoopCharacteristics实现或签会签
使用bpmn-js流程图开发过程中会遇到会签和或签的问题,这个时候我们就需要使用多实例配置来实现BPMN 2.0的配置实现了,多实例任务,是从流程编辑概念之初也就是Activiti时期就存在的一个方式。所谓的多实例任务也就是字面意思,一个任务由多个人完成,常见于我们的审批流程的或…...
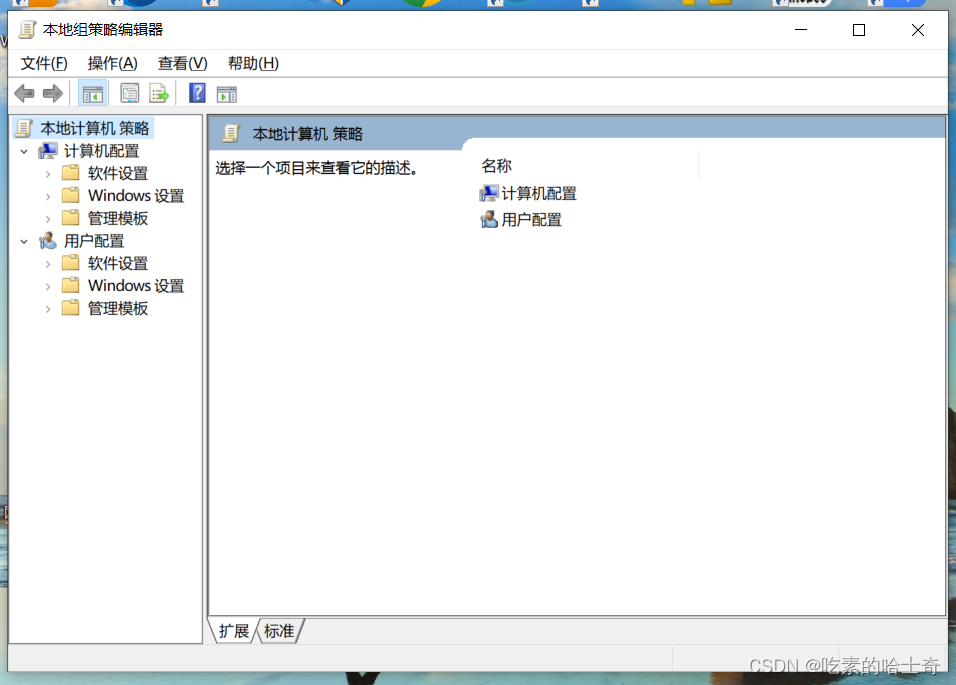
【gpedit.msc】组策略编辑器的安装,针对windows家庭版,没有此功能
创建一个记事本文件然后放入以下内容 echo offpushd "%~dp0"dir /b %systemroot%\Windows\servicing\Packages\Microsoft-Windows-GroupPolicy-ClientExtensions-Package~3*.mum >gp.txtdir /b %systemroot%\servicing\Packages\Microsoft-Windows-GroupPolicy-…...
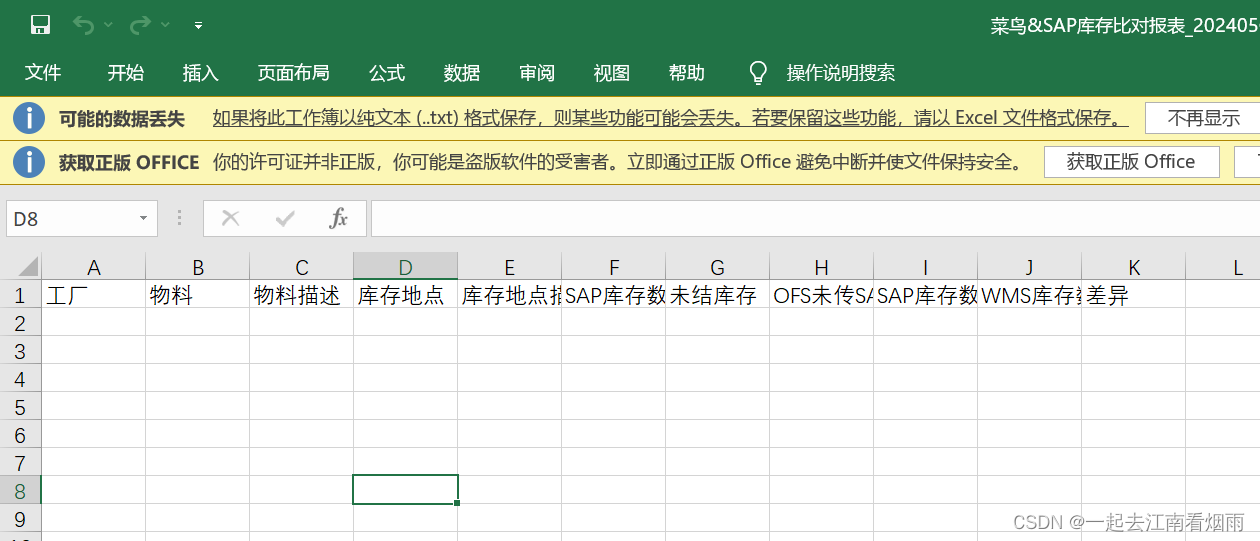
带EXCEL附件邮件发送相关代码
1.查看生成的邮件 2.1 非面向对象的方式(demo直接copy即可) REPORT Z12. DATA: IT_DOCUMENT_DATA TYPE SODOCCHGI1,IT_CONTENT_TEXT TYPE STANDARD TABLE OF SOLISTI1 WITH HEADER LINE,IT_PACKING_LIST TYPE TABLE OF SOPCKLSTI1 WITH HEADER LIN…...

【算法作业】均分卡牌,购买股票
问题描述 John 有两个孩子,在 John病逝后,留下了一组价值不一定相同的魔卡, 现在要求你设计一种策略,帮John的经管人将John的这些遗产分给他的两个孩子,使得他们获得的遗产差异最小(每张魔卡不能分拆&#…...
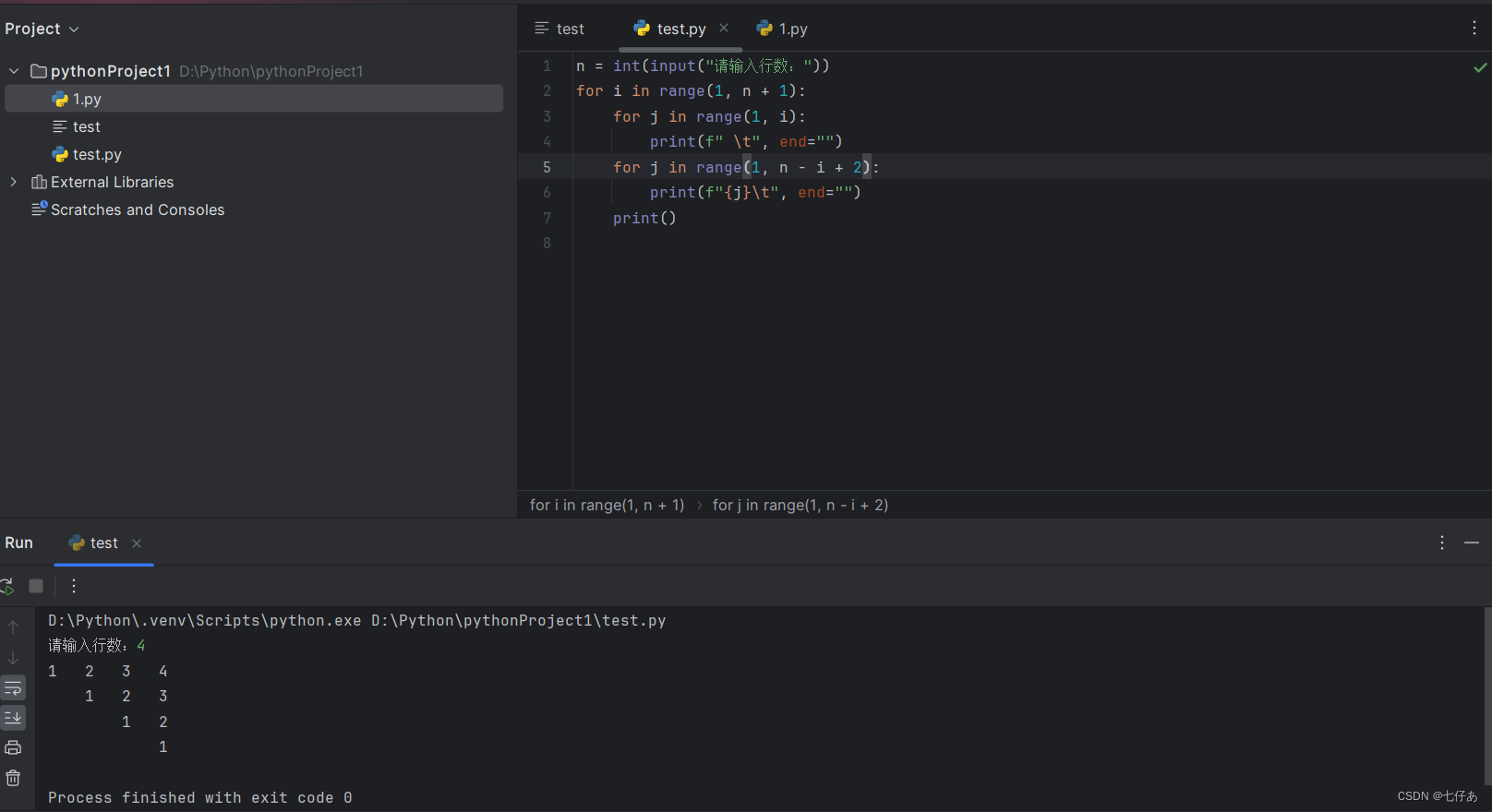
python作业
题目 分析 步骤: 判断先画空格还是数字 当有n层时,第i层有多少个空格第i层的起始数字是几,结尾是几,即数字取值范围当有n层时,第i层有多少个数字 代码 模式A n int(input("请输入行数:")) for i in range(…...

【Linux的文件篇章 - 管道文件】
Linux学习笔记---013 Linux的管道文件1、进程间通信1.1、进程为什么要通信?1.2、进程如何通信?1.3、进程通信的方式? 2、匿名管道2.1、理解一种现象2.2、基本概念和管道原理 3、管道的使用3.1、代码样例3.2、如何使用管道通信呢?3…...

C# 局部静态函数,封闭方法中的最佳选择
C# 局部静态函数,封闭方法中的最佳选择 简介特性 应用场景辅助计算递归与尾递归优化筛选与过滤操作查找与映射操作 生命周期静态局部函数 vs 普通局部函数性能封装性可读性 简介 C# 局部静态函数(Local Static Functions)是一种函数作用域内…...
安装)
【MySQL】MySQL 8.4.0 长期支持版(LTS)安装
就在2024年 “5.1” 节前,MySQL官方发布了8.4.0长期支持版(LTS - Long Term Support)。根据官方提供的文档,在本地虚拟机进行安装测试。 安装、配置和启动过程记录如下: 第一步,上传到安装包(my…...

nest中的ORM
在 Nest.js 中执行 SQL 查询通常涉及使用 TypeORM 或 Sequelize 这样的 ORM(对象-关系映射)库。这些库使得在 Nest.js 应用程序中连接和操作 SQL 数据库变得更加简单和直观。 以下是一个使用 TypeORM 在 Nest.js 中执行 SQL 查询的示例代码:…...
的完整用法)
别让拼写检查器坑了你的代码!Visual Studio中自定义排除字典(exclusion.dic)的完整用法
深度定制Visual Studio拼写检查:打造团队专属的exclusion.dic解决方案 当你在Visual Studio中看到熟悉的红色波浪线时,第一反应可能是代码出现了语法错误。但仔细一看,却发现是拼写检查器在提醒你"Hint"不是一个有效的英文单词。这…...

Creo二次开发避坑:用ProAsmcomppathInit搞定装配体遍历,别再卡在ProFeature转ProAsmcomppath了
Creo二次开发实战:高效构建装配体遍历路径的深度解析 在Creo二次开发领域,装配体遍历是许多高级功能的基础操作,但开发者常常会在ProFeature到ProAsmcomppath的转换过程中遭遇瓶颈。本文将从底层数据结构入手,揭示一种被多数文档忽…...

【LLM推理加速】Lookahead:无损加速新范式,如何用Trie树与多分支策略突破IO瓶颈
1. 为什么我们需要无损推理加速? 大语言模型在实际应用中面临的最大痛点之一就是推理速度慢。想象一下,当你向AI助手提问时,每次等待回复都要花上好几秒,这种体验有多糟糕。传统的加速方法比如量化(把模型参数从16位压…...

工业自动化实战:Modbus转Profinet网关配置与机器人PLC通信集成
1. 项目概述与核心需求解析最近在做一个产线自动化升级的项目,客户现场有一套六轴关节机器人,控制器是国产的ES-R6系列,需要和产线主控的西门子S7-1200 PLC进行实时数据交互。机器人负责上下料和精密装配,PLC则统筹整条线的启停、…...

从Vue源码的preinstall钩子看团队包管理器规范:npx only-allow pnpm的工程实践
1. 为什么需要统一包管理器 最近在查看Vue源码时,发现package.json里有个有趣的配置:"preinstall": "npx only-allow pnpm"。这行看似简单的命令,背后隐藏着团队协作中一个非常重要的问题——包管理器的统一性。 想象一下…...

昇思大模型垂域模型
昇思 MindSpore 垂域模型是基于通用大模型基座 行业数据微调 领域技术增强构建的行业专用 AI 模型,依托 MindSpore Transformers 套件与昇腾硬件,在医疗、金融、电力、法律、工业等领域实现深度落地,兼顾通用能力与行业专业性,训…...

AI 科技日报-2026年5月19日
AI 科技日报 | 2026年5月19日 今日AI领域八大要闻速递 1. 京东宣布AI研发投入增长超200%,"618"全面智能化 京东集团技术委员会主席曹鹏在"618"启动发布会上透露,今年京东体系AI相关研发投入增长将超200%,AI将首次全场…...

高效掌握Simscape Electrical:BLDC电机控制器设计的5大关键技术实战
高效掌握Simscape Electrical:BLDC电机控制器设计的5大关键技术实战 【免费下载链接】Design-motor-controllers-with-Simscape-Electrical This repository contains MATLAB and Simulink files used in the "How to design motor controllers using Simscape…...

【亲测免费】【免费下载】 探索视觉新边界:RexVision视觉框架深度解析
探索视觉新边界:RexVision视觉框架深度解析 【下载地址】RexVision视觉框架下载仓库 本仓库提供了一个名为“RexVision视觉框架”的资源文件下载。该框架是一个视觉处理相关的工具或库,用户只需将文件放置在D盘的根目录下即可进行编译和使用 项目地址:…...

【免费下载】 摩擦磨损仿真Archard模型 - FORTRAN子程序中文注释版:加速您的科研与工程项目
摩擦磨损仿真Archard模型 - FORTRAN子程序中文注释版:加速您的科研与工程项目 【下载地址】摩擦磨损仿真archard模型-FORTRAN子程序中文注释版 本仓库提供了一款专为摩擦磨损分析设计的Umeshmotion子程序模型,采用经典的Archard模型实现。此资源针对工程…...