ARM机密计算组件
安全之安全(security²)博客目录导读
目录
一、硬件架构
1、RME
二、软件和固件架构
1、RMM
2、其他固件标准(例如PSCI)
三、开源实现
1、TF-A
2、Veraison
3、工具链
四、动态TrustZone技术
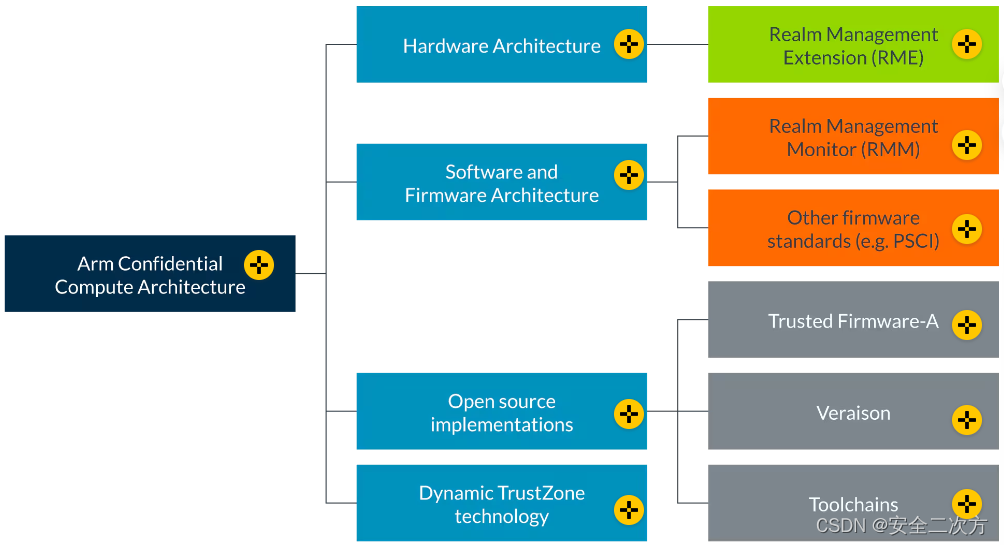
Arm机密计算架构(Arm CCA)引入了一系列硬件和软件创新,增强了Arm对大型计算密集型工作负载的机密计算的支持。下图显示了Arm机密计算架构的组件,下面对每个组件分别介绍。
 一、硬件架构
一、硬件架构

领域管理扩展(Realm Management Extension, RME)支持在Arm处理元素上运行动态的、可验证的和可信的执行环境(Realms)。
RME还支持动态TrustZone技术。
1、RME
Arm CCA引入了领域管理扩展(Realm Management Extension, RME),该扩展支持一类新的可证明隔离环境,称为Realm。RME是Arm CCA的硬件组件,它还包括软件元素。
本指南介绍了领域管理扩展(RME),这是该体系结构的扩展。
二、软件和固件架构

Arm还创建了一个软件架构,该架构使用RME硬件功能来创建、保护和支持可以承载主流虚拟机镜像的机密计算环境的认证。
1、RMM
领域管理监视器(Realm Management Monitor, RMM)为管理机密计算环境的系统软件组件定义了一个体系结构,称为Realm(领域)。
2、其他固件标准(例如PSCI)
电源状态协调接口(Power State Coordination Interface, PSCI)提供用于控制领域内虚拟处理元素的电源状态的服务。
三、开源实现
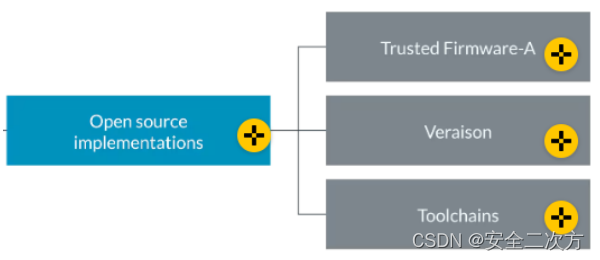
架构规范的开源实现支持透明度和同行评审,有助于实现之间的互操作性,并减少实现时间。
1、TF-A
EL0监视器(现在可用)和领域管理监视器(即将推出)的参考实现。
2、Veraison
这个开放软件计划正在创建可用于构建支持多种体系结构的设备认证验证服务的软件。为了支持Arm CCA,对Veraison项目的贡献将开发实现Arm CCA认证模型的插件。Veraison的治理目前被转移到机密计算联盟。
3、工具链
Arm正在参与工具链项目,如LLVM,以确保对Arm CCA的全面支持。
LLVM 13.0.0引入了对领域管理扩展的支持。
该体系结构的模型实现现在也可用。
四、动态TrustZone技术

RME通过支持向安全环境动态分配和取消分配物理内存来增强启用的TrustZone。
相关文章:
ARM机密计算组件
安全之安全(security)博客目录导读 目录 一、硬件架构 1、RME 二、软件和固件架构 1、RMM 2、其他固件标准(例如PSCI) 三、开源实现 1、TF-A 2、Veraison 3、工具链 四、动态TrustZone技术 Arm机密计算架构(Arm CCA)引入了一系列硬件和软件…...

Linux 生态与工具
各位大佬好 ,这里是阿川的博客 , 祝您变得更强 个人主页:在线OJ的阿川 大佬的支持和鼓励,将是我成长路上最大的动力 阿川水平有限,如有错误,欢迎大佬指正 目录 Linux生态简介:Linux工具lrzszÿ…...

RHCE网络服务配置之循环执行的例行性工作
1、什么是循环执行的例行性工作 循环执行的例行性工作:每隔一定的周期就需要执行一次 2、crontab的工作过程 /etc/cron.allow,写在该文件的人可以使用crontab命令 /etc/cron.deny,黑名单 两个文件如果都不存在,只有root能使用…...
vue3使用el-radio-group获取表格数据无法选中问题
这里是引用 今天写项目发现使用el-radio-group无法获取表格中的数据,于是去官网查看了一下,发现写的没啥问题,就是 <el-radio value"1" size"large"> 未知</el-radio>这样的写法,又在网上看了一些…...
java并发
基本概念 并发编程可以抽象成三个核心问题: 分工、同步/协作、互斥分工 将当前 Sprint 的 Story 拆分成「合适」大小的 Task,并且安排给「合适」的 Team Member 去完成 拆分的粒度太粗,导致这个任务完成难度变高,耗时长,不易与其他人配合;拆分的粒度太细,又导致任务太多…...

Python Selenium Grid 环境快速搭建
今天在看selenium grid文档的时候,发现selenium grid4的设计还是不错的,想顺手体验一下,于是就发现了docker-selenium项目,可以快速的设置好selenium grid环境,非常简单方便。 然而后面准备用python去写个简单例子的时…...
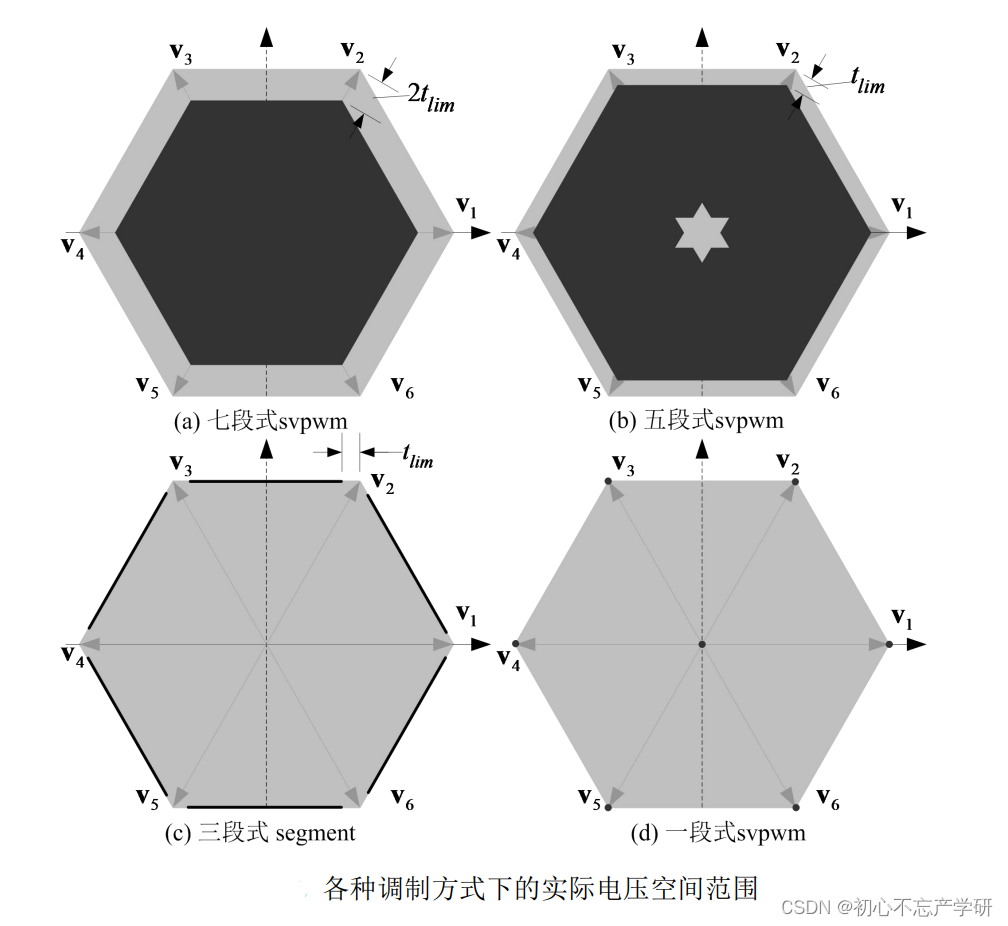
电机控制系列模块解析(21)—— 弱磁控制
一、弱磁控制 常用的FW即弱磁控制方法一般为:电压外环控制、单个电流环控制、直接输出电压幅值分配控制、输出电压角度PI控制、不弱磁控制、直接解析解、查表、速度反比例曲线拟合等等。 弱磁控制相关因素:过调制(母线电压的剧烈波动&#x…...

【3dmax笔记】022:文件合并、导入、导出
文章目录 一、合并二、导入三、导出四、注意事项一、合并 只能合并 max 文件(高版本能够合并低版本模型,低版本不能合并高版本的模型)。点击【文件】→【导入】→【合并】: 选择要合并的文件,后缀名为3dmax默认的格式,max文件。 二、导入 点击【文件】→【导入】→【导…...
8、QT——QLabel使用小记2
前言:记录开发过程中QLabel的使用,持续更新ing... 开发平台:Win10 64位 开发环境:Qt Creator 13.0.0 构建环境:Qt 5.15.2 MSVC2019 64位 一、基本属性 技巧:对于Qlabel这类控件的属性有一些共同的特点&am…...

python实现读取串口数据-使用LibModbus库实现一个实时读取串口数据
在工业自动化领域,Modbus协议因其简单、可靠和广泛支持而备受青睐。其中,Modbus RTU(串行通信)以其低成本和易实施性在许多场景中发挥着重要作用。 01 Modbus RTU协议简介 Modbus RTU是一种基于串行通信的Modbus协议,…...
)
类与面向对象编程(Object-Oriented Programming, OOP)
类与面向对象编程(Object-Oriented Programming, OOP)(一) 对象比较:‘is’ 对比 ‘’ 当我还是个孩子的时候,我们的邻居拥有一对双胞胎猫咪。它们看起来几乎一模一样—同样的炭黑色毛发和同样锐利的绿色…...
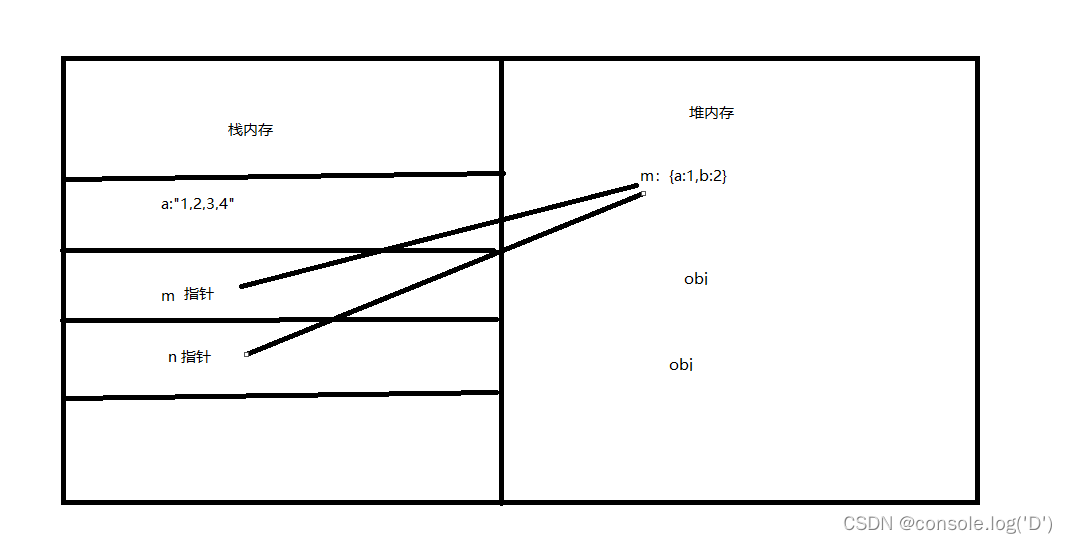
引用数据类型 栈内存 堆内存
let m { a: 10, b: 20 }; let n m; n.a 15; console.log(m.a) // 15 原因:基本数据类型存储在栈内存中,引用数据类型存储在堆内存中 ,引用数据类型存储在堆内存中会在栈内存中创建一个指针,栈内存中的这个指针指向堆内存中的地…...

【class8】人工智能初步(图像识别-----卷积神经网络)
上节回顾 上节课,我们简单了解了图像识别和深度学习的相关知识。 快速回顾一下吧~ A图像识别是以图像的主要特征为基础的。B. 图像分辨率决定图像的质量。 C. 像素是图像中的最小单位D. 在图像识别的原理上,计算机和人类在本质…...

Node.js安装及环境配置(超详细!保姆级!!)
目录 一、进入官网地址下载安装包 二、安装程序 三、环境配置 四、测试 五、安装淘宝镜像 一、进入官网地址下载安装包 Node.js — Download Node.js (nodejs.org) 选择对应你系统的 node.js 版本,我选择的是Windows系统,64位 点击图中选项&#…...

利用反射如何动态生成sql
一.自定义注解 UpdateWhere Target({ElementType.FIELD}) //作用于类 Retention(RetentionPolicy.RUNTIME) //运行时有效 Documented //可以出现在文档里 Inherited public interface UpdateWhere {}二.创建实体类接受 pu…...

SpringBoot项目中使用Redis,Mybatis和JWT
在Spring Boot项目中,结合Redis,MyBatis和JWT的使用可以提供以下功能: Redis的作用: 1.缓存:Redis可以用作缓存存储,提高应用程序的性能和响应速度。特别是对于频繁读取但不经常更新的数据,如配…...

CSS2(一):CSS选择器
文章目录 1、CSS基础1.1 CSS简介1.2 CSS编写位置1.2.1 行内样式1.2.2 内部样式1.2.3 外部样式1.2.4 样式优先级 1.2.5 CSS代码风格 2、CSS选择器2.1、基本选择器2.1.1 通配选择器2.1.2 元素选择器2.1.3 类选择器2.1.4 ID选择器2.1.5 总结 2.2、CSS复合选择器2.2.1 交集选择器2.…...
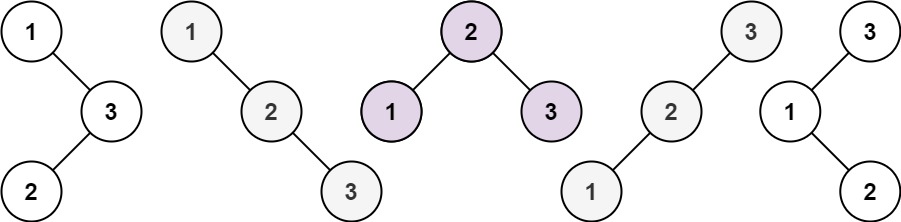
LeetCode题练习与总结:不同的二叉搜索树--96
一、题目描述 给你一个整数 n ,求恰由 n 个节点组成且节点值从 1 到 n 互不相同的 二叉搜索树 有多少种?返回满足题意的二叉搜索树的种数。 示例 1: 输入:n 3 输出:5示例 2: 输入:n 1 输出&…...

第八十一章 将 Web 应用程序与远程 Web 服务器结合使用 - 如果从 Web 服务器提供静态文件
文章目录 第八十一章 将 Web 应用程序与远程 Web 服务器结合使用 - 如果从 Web 服务器提供静态文件如果从 Web 服务器提供静态文件配置 Web 服务器路径将虚拟目录添加到 IIS将别名添加到 Apache 配置 第八十一章 将 Web 应用程序与远程 Web 服务器结合使用 - 如果从 Web 服务器…...
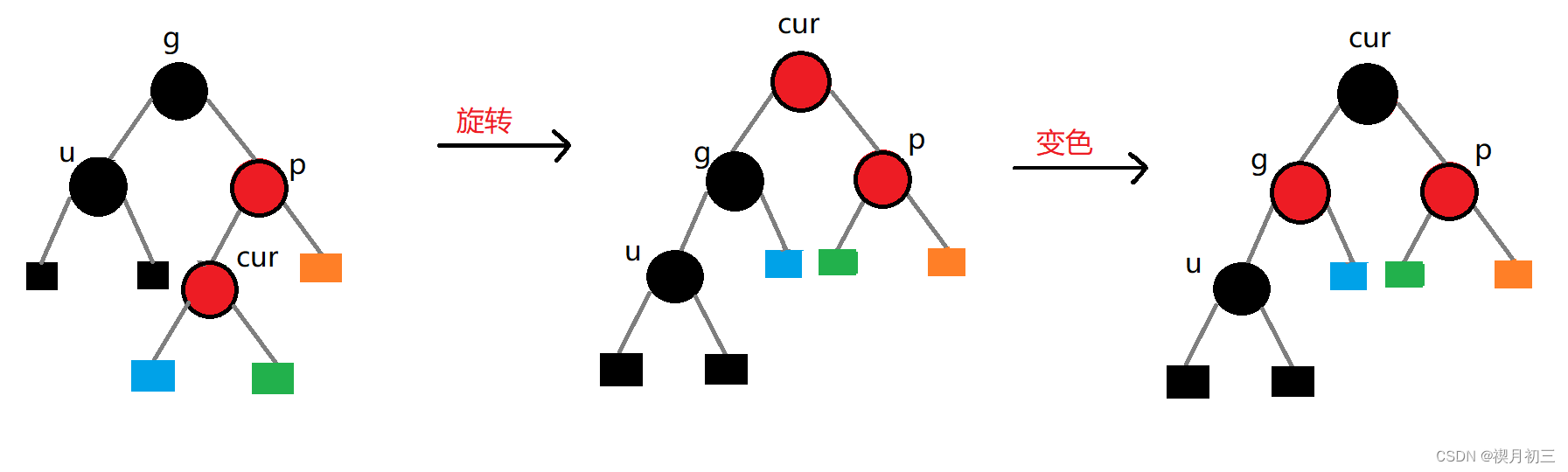
AVL树、红黑树
数据结构、算法总述:数据结构/算法 C/C-CSDN博客 AVL树 定义 空二叉树是一个 AVL 树如果 T 是一棵 AVL 树,那么其左右子树也是 AVL 树,并且 ,h 是其左右子树的高度树高为 平衡因子:右子树高度 - 左子树高度 创建节点…...

矩阵从0到自动化运转的4个阶段:90%的团队死在第2阶段
原创声明:✅ 本文为运营阶段理论分析与实战调研总结,涉及工具仅作阶段验证案例,不构成任何商业推荐。一、先说一个反直觉的事实我追踪了20个矩阵团队从0到稳定运营的全过程,发现一个规律:阶段存活率平均耗时最常见的死…...

手把手教你用DaVinci Developer和Configurator Pro搞个‘联合作战’环境
实战指南:构建DaVinci工具链协同开发环境 在汽车电子软件开发领域,Vector公司的DaVinci工具链已成为AUTOSAR标准落地的重要支撑。对于需要同时处理软件组件(SWC)设计和ECU配置的团队而言,如何高效协同使用DaVinci Developer和Configurator Pr…...

终极指南:如何免费搭建专业的电子实验室笔记本系统
终极指南:如何免费搭建专业的电子实验室笔记本系统 【免费下载链接】elabftw :notebook: eLabFTW is the most popular open source electronic lab notebook for research labs. 项目地址: https://gitcode.com/gh_mirrors/el/elabftw eLabFTW是一款功能强大…...

嵌入式存储优化实战:如何为你的AUTOSAR FEE模块选择合适的FeeMainFunctionPeriod与FeeMaxBytesPerCycle?
嵌入式存储优化实战:AUTOSAR FEE模块参数配置与性能调优 在汽车电子控制单元(ECU)的开发中,存储管理一直是影响系统性能和可靠性的关键因素。AUTOSAR的Flash EEPROM Emulation(FEE)模块作为非易失性数据存储…...

从STM32到RISC-V:如何快速将你的4P OLED驱动移植到CH32V307上
从STM32到RISC-V:如何快速将你的4P OLED驱动移植到CH32V307上 对于习惯了STM32标准库开发的工程师来说,第一次接触RISC-V架构的CH32V307系列时,最迫切的需求往往是如何快速复用现有的硬件驱动代码。本文将聚焦4P OLED屏幕的驱动移植ÿ…...

【Midjourney放松模式深度解密】:20年AI图像生成专家亲测的4大核心差异与3种误用陷阱
更多请点击: https://kaifayun.com 第一章:Midjourney放松模式的本质定义与演进脉络 放松模式(Relaxed Mode)是Midjourney V6引入的一项关键资源调度机制,其本质并非降低图像生成质量,而是通过动态协调GPU…...

如何在macOS上轻松运行Windows应用:Whisky终极指南
如何在macOS上轻松运行Windows应用:Whisky终极指南 【免费下载链接】Whisky A modern Wine wrapper for macOS built with SwiftUI 项目地址: https://gitcode.com/gh_mirrors/wh/Whisky 想在苹果电脑上使用Windows专属的软件和游戏吗?厌倦了虚拟…...

DayZ单机模组终极指南:打造专属末日世界的5个关键步骤
DayZ单机模组终极指南:打造专属末日世界的5个关键步骤 【免费下载链接】DayZCommunityOfflineMode A community made offline mod for DayZ Standalone 项目地址: https://gitcode.com/gh_mirrors/da/DayZCommunityOfflineMode 厌倦了DayZ在线服务器中的网络…...
)
51单片机入门实战:用Keil+Proteus做个带蜂鸣器报警的按键计数器(附完整代码)
51单片机实战:从零构建带蜂鸣器报警的按键计数器 项目背景与核心功能 对于刚接触51单片机的开发者来说,独立完成一个小型综合项目往往能带来巨大的成就感。这次我们要实现的是一个结合按键计数、数码管显示和蜂鸣器报警的完整系统。当用户按下按键时&a…...

从算法理想向工程现实的跨越:SLAM 核心架构、思维误区与 Nav2 实战避坑指南
前言:直面 SLAM 的“先有鸡还是先有蛋” 在机器人领域,SLAM(Simultaneous Localization and Mapping,同时定位与地图构建) 毫无疑问是最耀眼的明珠之一。简单来说,它的核心任务就是让一个机器人在未知环境中…...