【C++杂货铺铺】AVL树
目录
🌈前言🌈
📁 概念
📁 节点的定义
📁 插入
📁 旋转
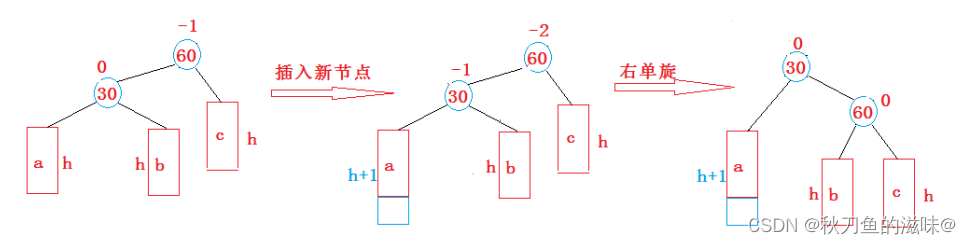
1 . 新节点插入较高左子树的左侧---左左:右单旋
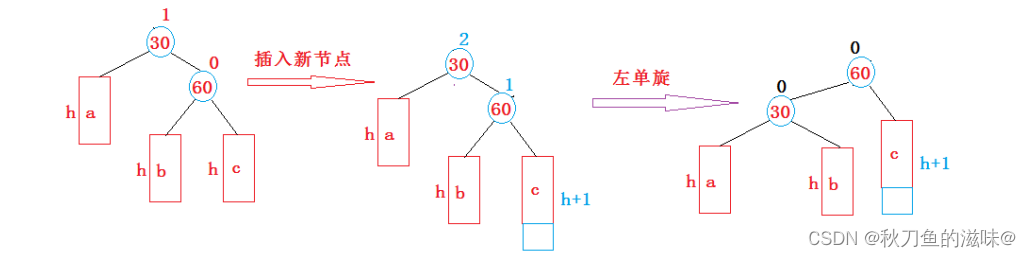
2. 新节点插入较高右子树的右侧---右右:左单旋
3. 新节点插入较高左子树的右侧---左右:先左单旋再右单旋
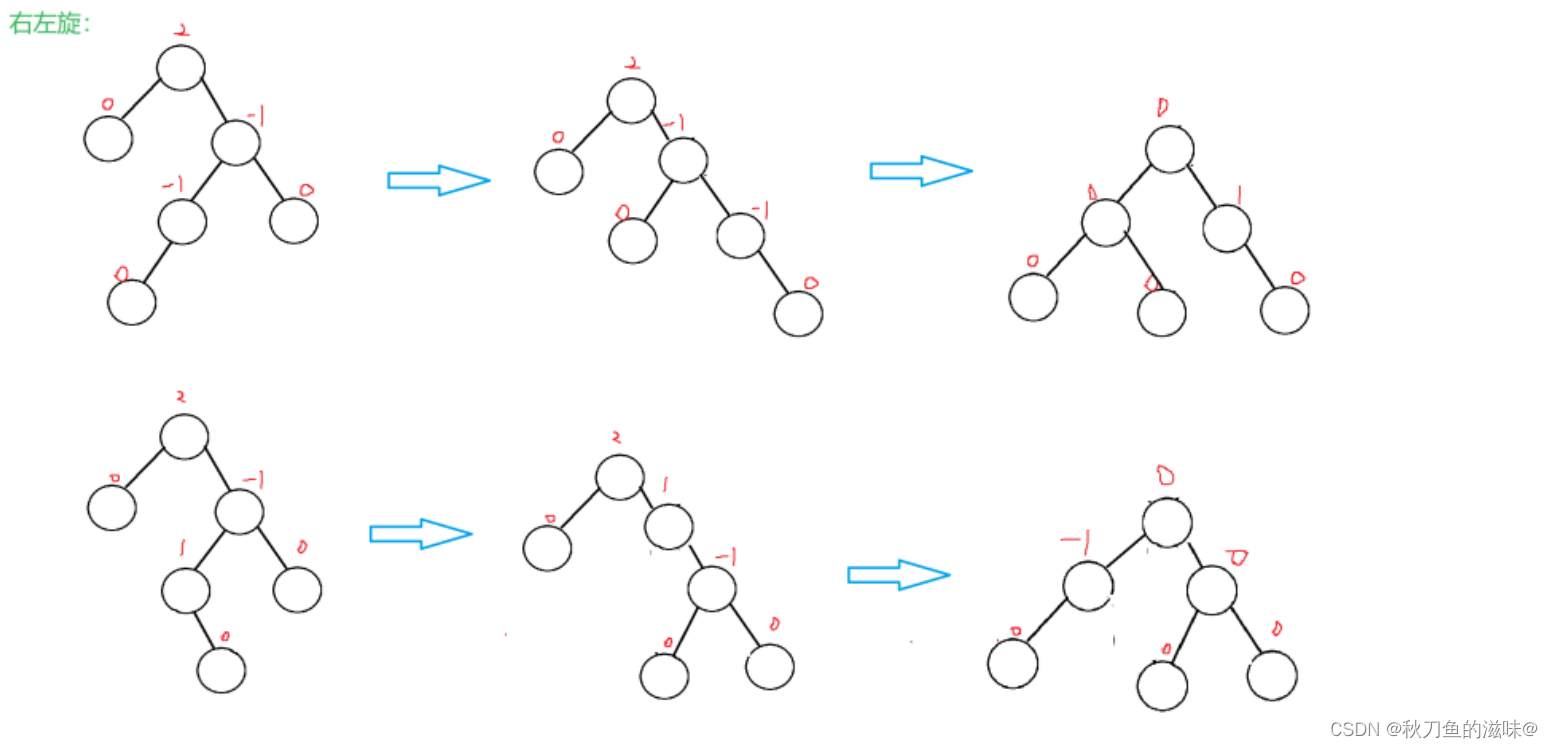
4. 新节点插入较高右子树的左侧---右左:先右单旋再左单旋
📁 性能
📁 完整代码
📁 总结
🌈前言🌈
欢迎观看本期【C++杂货铺】,这期内容讲解AVL树,包括了什么是AVL树,如何实现AVL树,此外还会分析二叉搜索树的性能。
学习本期内容之前,需要你对什么是二叉搜索树有一定的了解,如果不会很了解,或忘记可以快速阅览下面这篇文章:
【C++杂货铺】二叉搜索树-CSDN博客
📁 概念
在二叉搜索树中,规定比节点小的值都放在节点的左边,比几点大的值都放在节点的右边,可以大大缩短查找的效率。
但是如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率底下。
因此俄罗斯的两位数学家在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新节点后,如果能保证每个节点的左右子树之差绝对值不超过1(需要对树中节点进行调整),即可降低树的高度,从而减少平均搜索长度。
一颗AVL树必须具有以下性质:
1. 它的左右子树都是AVL树.
2. 左右子树高度之差(简称平衡因子)的绝对值不超过1( -1 / 0 / 1).
如果一颗二叉搜索树是高度平衡的,那么它就是AVL树。如果它有n个节点,其高度可以维持在O(log N) ,搜索时间复杂度O(log N)。
📁 节点的定义
template<class T>
struct AVLTreeNode
{AVLTreeNode(const T& data): _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _pLeft; // 该节点的左孩子AVLTreeNode<T>* _pRight; // 该节点的右孩子AVLTreeNode<T>* _pParent; // 该节点的双亲T _data;int _bf; // 该节点的平衡因子
};📁 插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。
那么 AVL树的插入过程可以分为两步:
1. 按照二叉搜索树的方式插入新节点
2. 调整节点的平衡因子
bool Insert(const T& data)
{// 1. 先按照二叉搜索树的规则将节点插入到AVL树中// 2. 新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,并检测是否破坏了AVL树的平衡性/*pCur插入后,pParent的平衡因子一定需要调整,在插入之前,pParent的平衡因子分为三种情况:-1,0, 1, 分以下两种情况:1. 如果pCur插入到pParent的左侧,只需给pParent的平衡因子-1即可2. 如果pCur插入到pParent的右侧,只需给pParent的平衡因子+1即可此时:pParent的平衡因子可能有三种情况:0,正负1, 正负21. 如果pParent的平衡因子为0,说明插入之前pParent的平衡因子为正负1,插入后被调整成0,此时满足AVL树的性质,插入成功2. 如果pParent的平衡因子为正负1,说明插入前pParent的平衡因子一定为0,插入后被更新成正负1,此时以pParent为根的树的高度增加,需要继续向上更新3. 如果pParent的平衡因子为正负2,则pParent的平衡因子违反平衡树的性质,需要对其进行旋转处理*/while (pParent){// 更新双亲的平衡因子if (pCur == pParent->_pLeft)pParent->_bf--;elsepParent->_bf++;// 更新后检测双亲的平衡因子if (0 == pParent->_bf){break;}else if (1 == pParent->_bf || -1 == pParent->_bf){pCur = pParent;pParent = pCur->_pParent;}else{//根据不同情形,进行旋转...}}return true;
}
📁 旋转
1 . 新节点插入较高左子树的左侧---左左:右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;parent->_left = subLR;
if (subLR)subLR->_parent = parent;subL->_right = parent;Node* pparent = parent->_parent;
parent->_parent = subL;
if (parent == _root)
{_root = subL;_root->_parent = nullptr;
}
else
{if (parent == pparent->_right){pparent->_right = subL;}else{pparent->_left = subL;}subL->_parent = pparent;}subL->_bf = parent->_bf = 0;
}2. 新节点插入较高右子树的右侧---右右:左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* pparent = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;_root->_parent = nullptr;}else{if (parent == pparent->_right){pparent->_right = subR;}else{pparent->_left = subR;}subR->_parent = pparent;}subR->_bf = parent->_bf = 0;
}3. 新节点插入较高左子树的右侧---左右:先左单旋再右单旋

void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else if(bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false);}
}4. 新节点插入较高右子树的左侧---右左:先右单旋再左单旋
//右左单旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if(bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false);}
}Node* _root = nullptr;
};AVL树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证AVL树,可以分两步:
1. 验证其为二叉搜索树 如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
2. 验证其为平衡树 每个节点子树高度差的绝对值不超过1(注意节点中如果没有平衡因子) 节点的平衡因子是否计算正确
📁 性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这 样可以保证查询时高效的时间复杂度,即log2 N。但是如果要对AVL树做一些结构修改的操 作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时, 有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数 据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
📁 完整代码
template<class T>
struct AVLTreeNode
{typedef AVLTreeNode<T> Node;AVLTreeNode(const T& val = T()):_left(nullptr), _right(nullptr), _parent(nullptr), _val(val), _bf(0){}Node* _left;Node* _right;Node* _parent;T _val;//平衡因子int _bf;
};template<class T>
class AVLTree
{typedef AVLTreeNode<T> Node;
public://插入bool Insert(const T& val){if (_root == nullptr){_root = new Node(val);return true;}Node* cur = _root;Node* parent = nullptr;while (cur){if (cur->_val> val){parent = cur;cur = cur->_left;}else if (cur->_val < val){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(val);if (parent->_val < val){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//调整平衡因子while (parent){if (cur == parent->_right){parent->_bf++;}else{parent->_bf--;}if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//ROTATE//1. 右单旋if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}//2. 左单旋else if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}//3. 左右单旋else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}//4. 右左单旋else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}break;}else{assert(false);}}return true;}//遍历void Inorder(){_Inorder(_root);}//判断是否是平衡二叉树bool IsBalance(){return _IsBalance(_root);}int Height(){return _Height(_root);}protected:int _Height(Node* root){if (root == nullptr)return 0;return max(_Height(root->_right), _Height(root->_left)) + 1;}bool _IsBalance(Node* root){if (root == nullptr)return true;int leftsize = _Height(root->_left);int rightsize = _Height(root->_right);//检查右子树 - 左子树 < 2if (abs(rightsize - leftsize) >= 2){return false;}//检查平衡因子是否正确if (rightsize - leftsize != root->_bf)return false;return _IsBalance(root->_right)&& _IsBalance(root->_left);}void _Inorder(Node* root){if (root == nullptr){return;}_Inorder(root->_left);cout << root->_val << endl;_Inorder(root->_right);}//左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* pparent = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;_root->_parent = nullptr;}else{if (parent == pparent->_right){pparent->_right = subR;}else{pparent->_left = subR;}subR->_parent = pparent;}subR->_bf = parent->_bf = 0;}//右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* pparent = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;_root->_parent = nullptr;}else{if (parent == pparent->_right){pparent->_right = subL;}else{pparent->_left = subL;}subL->_parent = pparent;}subL->_bf = parent->_bf = 0;}//左右单旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else if(bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false);}}//右左单旋void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if(bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false);}}Node* _root = nullptr;
};📁 总结
以上就是本期【C++杂货铺】的主要内容了,主要验证了什么是AVL树,即一颗绝对平衡的二叉搜索树,通过平衡因子进行旋转平衡。展示了AVL树的模拟实现代码,深入理解了AVL树。
最后,如果感觉本期内容对你有帮助,欢迎点赞,收藏,关注。Thanks♪(・ω・)ノ
相关文章:
【C++杂货铺铺】AVL树
目录 🌈前言🌈 📁 概念 📁 节点的定义 📁 插入 📁 旋转 1 . 新节点插入较高左子树的左侧---左左:右单旋 2. 新节点插入较高右子树的右侧---右右:左单旋 3. 新节点插入较高左…...
【R语言】生存分析模型
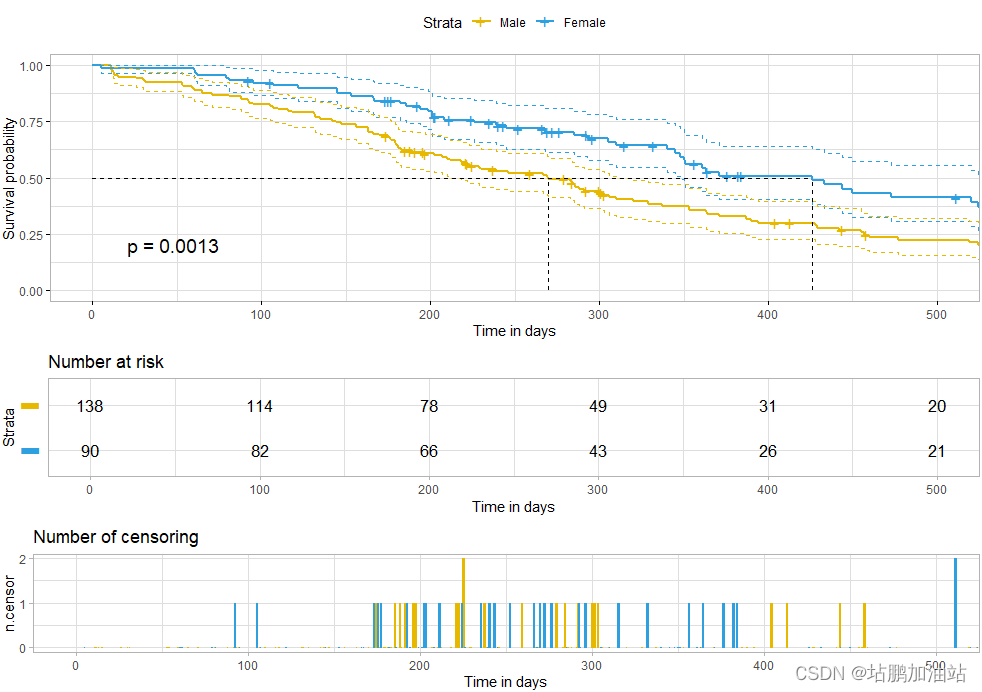
生存分析模型是用于研究时间至某个事件发生的概率的统计模型。这个事件可以是死亡、疾病复发、治疗失败等。生存分析模型旨在解决在研究时间相关数据时的挑战,例如右侧截尾(右侧截尾表示未观察到的事件发生,例如研究结束时还未发生事件&#…...

「AIGC」Python实现tokens算法
本文主要介绍通过python实现tokens统计,避免重复调用openai等官方api,开源节流。 一、设计思路 初始化tokenizer使用tokenizer将文本转换为tokens计算token的数量二、业务场景 2.1 首次加载依赖 2.2 执行业务逻辑 三、核心代码 from transformers import AutoTokenizer imp…...

【Unity】编程感悟20240510
【背景】 这一点感悟是过去有所认识,但是最近写Unity项目,涉及UDP通信需要持续监听逻辑时更加感受深刻的。 选用合适的触发点,用明确的逻辑避免循环处理 尽量采用明确的触发点使逻辑清晰,规避一定时间刷新这类的逻辑。 比如UDP…...
C#【进阶】泛型
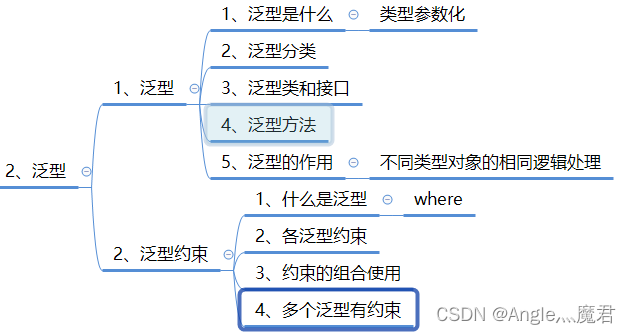
1、泛型 文章目录 1、泛型1、泛型是什么2、泛型分类3、泛型类和接口4、泛型方法5、泛型的作用思考 泛型方法判断类型 2、泛型约束1、什么是泛型2、各泛型约束3、约束的组合使用4、多个泛型有约束思考1 泛型实现单例模式思考2 ArrayList泛型实现增删查改 1、泛型是什么 泛型实现…...
50. UE5 RPG FGameplayEffectContext
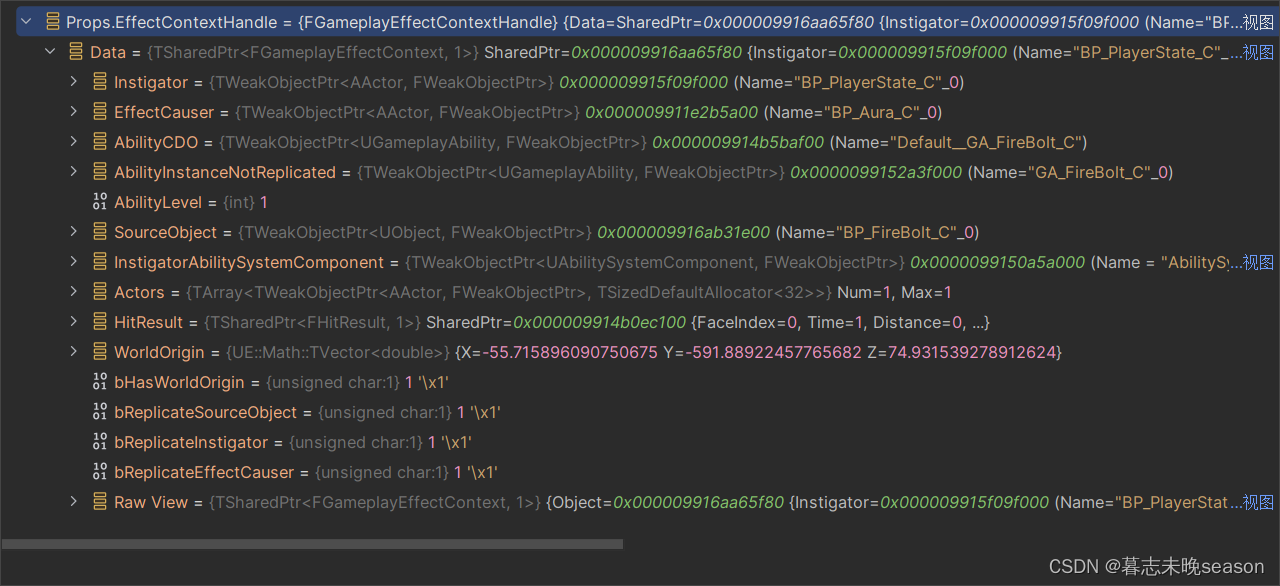
接下来,我想实现处理完伤害时,将伤害的触发格挡或者触发暴击时的逻辑传递到数据集的PostGameplayEffectExecute里面,这样,在处理IncomingDamage时,我们可以通过释放触发格挡或者触发暴击在UI上面进行对应的效果表现。 …...

Golang 的 unmarshal 踩坑指南
文章目录 1. 写在最前面2. 字段区分出空字段还是未设置字段2.1 问题描述2.2 解决 3. 字段支持多种类型 & 按需做不同类型处理3.1 问题描述3.2 解决 4. 碎碎念5. 参考资料 1. 写在最前面 笔者最近在实现将内部通知系统的数据定义转化为产品定义的对外提供的数据结构。 举例…...
Linux的常用指令 和 基础知识穿插巩固(巩固知识必看)
目录 前言 ls ls 扩展知识 ls -l ls -a ls -al cd cd 目录名 cd .. cd ~ cd - pwd 扩展知识 路径 / cp [选项] “源文件名” “目标文件名” mv [选项] “源文件名” “目标文件名” rm 作用 用法 ./"可执行程序名" mkdir rmdir touch m…...

MP3解码入门(基于libhelix)
主要参考资料: 【Arduino Linux】基于 Helix 解码库实现 MP3 音频播放: https://blog.csdn.net/weixin_42258222/article/details/122640413 libhelix-mp3: https://github.com/ultraembedded/libhelix-mp3/tree/master 目录 一、MP3文件二、MP3 解码库三、libhelix-mp3库3.1 …...
)
Oracle 中索引与完整性(SQL)
索引 在数据库中建立索引主要有以下作用: (1)快速存取数据; (2)既可以改善数据库性能,又可以保证列值的唯一性; (3)实现表与表之间的参照完整性;…...
】)
【Linux深度学习笔记5.13(Apache)】
Apache : 1.安装yum -y install hhtpd2.启动hhtpd -k start3.停止httpd -k stop4.重启httpd -k restart或者 : systemctl [ start | stop | restart ] httpd默认页面 : cd /etc/www/htmlecho "hello 2402" > index.html验证 : 浏览器访问 : http://ip 访问控制…...

汇编语言入门:探索 x86 架构
目录 前言 1. x86 语言 x86 架构简介 x86 架构的特点 x86 架构的演变 x86 架构的应用 2. 常用汇编指令集 3. 寻址方式 结语 前言 汇编语言是一种低级编程语言,直接面向计算机的硬件架构。在计算机科学中,了解汇编语言是非常重要的,因…...

[ffmpeg处理指令]
1 将h264转为mp4 ffmpeg -f h264 -i front_far_0.264 -vcodec copy front_far_0.mp4 ffmpeg -f h264 -i front_near_0.264 -vcodec copy front_near_0.mp4 -i:表示输入文件 front_far_2.mp4:表示输出文件 2 h264转为图片 front_far 是目标路径,需要…...
测试之路 - 精准而优雅
引子 这几年业内一直在做精准测试,大都使用工具 diff 代码改动、分析代码覆盖率这些平台集成的能力。 业务测试中,我们在技术设计和代码实现的基础上也做了一些精减和精准的测试实践,通过深入测试有针对的设计 case,发现隐藏问题…...

Java基础篇常见面试问题总结
文章目录 1. 你是怎样理解 OOP面向对象?2. 重载与重写区别3. 接口与抽象类的区别4. 深拷贝与浅拷贝的理解5. 什么是自动拆装箱? int和 Integer有什么区别6. 和 equals()区别7. String类 能被继承吗为什么用 final修饰8. final、finally、finalize区别 1. 你是怎样理…...

Spring、SpringMVC
一、Spring框架中的单例Bean是线程安全的吗? 【默认单例的情况下】Spring Bean并没有可变的状态(如Service类和DAO类),即只能查不能改,所以没有并发问题,所以某种程度上来说Spring的单例Bean是线程安全的。…...

【传知代码】VRT: 关于视频修复的模型(论文复现)
前言:随着数字媒体技术的普及,制作和传播视频内容变得日益普遍。但是,视频中由于多种因素,例如传输、存储和录制设备等,经常出现质量上的问题,如图像模糊、噪声干扰和低清晰度等。这类问题对用户的体验和观…...

不用投稿邮箱,怎样向各大新闻媒体投稿?
身为单位的信息宣传员,我深知肩上责任重大。每个月,完成单位在媒体上投稿发表文章的考核任务,就如同一场无声的赛跑,既要保证速度,更要注重质量。起初,我遵循“前辈们”的老路,一头扎进了邮箱投稿的海洋。但很快,现实给了我一记重拳——邮箱投稿的竞争犹如千军万马过独木桥,稿件…...
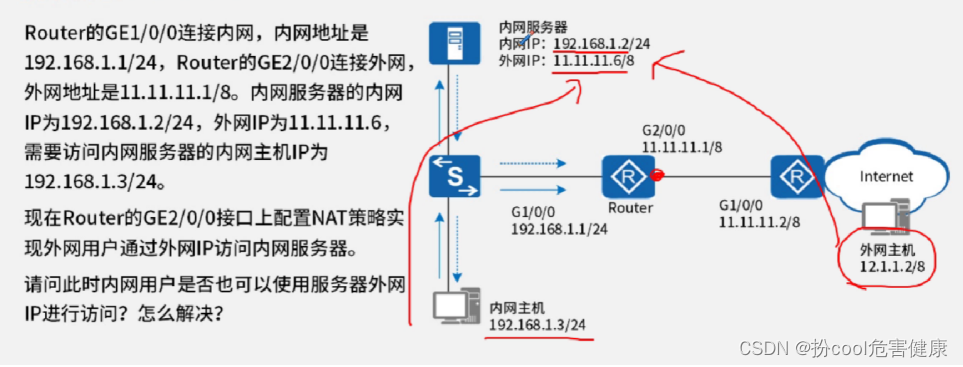
NAT技术总结与双向NAT配置案例
NAT的转换方式: 1.静态转换:固定的一对一IP地址映射。 interface GigabitEthernet0/0/1 ip address 122.1.2.24 nat static global 122.1.2.1 inside 192.168.1.1 #在路由器出接口 公网地址 私网地址。 2.动态转换:Basic NAT nat address-gr…...

mysql的explain
explain可以用于select,delete,insert,update的statement。 当explain用于statement时,mysql将会给出其优化器(optimizer)的执行计划。 通过explain字段生成执行计划表。下面来解析这个执行计划表的每一列…...

XXMI-Launcher:多游戏Mod管理平台的终极指南
XXMI-Launcher:多游戏Mod管理平台的终极指南 【免费下载链接】XXMI-Launcher Modding platform for GI, HSR, WW and ZZZ 项目地址: https://gitcode.com/gh_mirrors/xx/XXMI-Launcher XXMI-Launcher是一款专为热门游戏设计的Mod管理平台,支持《原…...

基于Adafruit与CircuitPython的交互式光剑:从硬件选型到3D打印全流程解析
1. 项目概述:打造一把会“呼吸”的交互式光剑几年前,当我第一次在游戏里挥动《塞尔达传说》中的大师之剑时,就被那种兼具力量感与神圣感的视觉效果深深吸引。作为一个硬件创客,我一直在想,能不能把这种虚拟的体验带到现…...

IDA逆向分析实战:破解函数限制、修复栈平衡与Switch识别
1. 破解IDA函数大小限制的实战技巧 第一次用IDA反编译大型函数时,看到"function is too big"的提示真是让人头疼。这个限制其实是IDA为了防止资源耗尽设置的保险机制,但现代计算机的性能早已今非昔比。我去年分析一个游戏引擎时,核…...

保姆级教程:用Python+Matplotlib处理微波辐射计LV2数据,绘制专业温度廓线图
科研级气象数据可视化:PythonMatplotlib处理微波辐射计数据的完整实践指南 清晨5点23分,实验室的微波辐射计刚刚完成一次完整的温度廓线扫描。屏幕上跳动的数字背后,隐藏着从地面到平流层的大气热力学密码。对于大气科学研究者而言࿰…...

缤纷夏日 心有所“暑”
邻聚美好时光,在升腾的烟火气里我们共同收藏了夏日的N种欢乐回顾七月光影流转的坝坝电影唤醒了儿时记忆孩子们在飞舞的泡泡大作战里嬉闹篮球场上矫健的身姿瞬间定格更有贴心的便民服务磨亮生活锋刃、洗净门前地垫,便捷直达家门这个缤纷夏日,因…...

职场新人不会写自我介绍?3分钟AI生成直接拿面试
刚步入职场的新人,写简历是不是最怕碰到“自我评价”或“自我介绍”这一栏?盯着空白屏幕憋了一下午,最后只能干巴巴地敲下“性格开朗、吃苦耐劳、具有团队合作精神”这种假大空的话。好不容易搞定简历投递出去,结果总是石沉大海&a…...

科技赋能林草防火,合规筑牢生态屏障—— 杭兴智能 XHJK‑5000 / HXJK‑6000 系列智慧宣传杆适配 LY/T 2798‑2025 标准实践
森林草原是我国重要的生态资源,守护林草安全、防范火灾风险,是生态文明建设的关键一环。随着《森林草原防灭火条例》深入实施与林业行业标准化建设持续推进,传统人工巡护、静态标语、零散警示等方式,已难以满足新时期 “预防为主、…...

给排水设计新人必看:如何用SWMM快速搭建一个‘麻雀虽小五脏俱全’的练习模型?
SWMM实战入门:从零构建微型排水系统的设计思维训练 刚接触市政给排水设计的职场新人,面对SWMM软件界面总有种"知道每个按钮功能,却不知从何下手"的困惑。这就像拿到一套精良的绘图工具,却不知道如何组合线条构成有意义的…...

别再乱写RS485协议了!基于STM32F103C8T6,聊聊工业通讯中帧结构的那些坑
工业级RS485通讯协议设计:从基础到实战的避坑指南 在嘈杂的工厂车间里,一排STM32F103C8T6控制器通过RS485总线连接着二十多台设备。突然,3号节点的温度传感器数据开始随机跳变,而工程师小王发现每当隔壁车间的变频器启动时&#x…...

【亲测免费】 Realtek-RTD2660源代码:开启显示设备定制化的新纪元
Realtek-RTD2660源代码:开启显示设备定制化的新纪元 【下载地址】Realtek-RTD2660源代码源程序 本仓库提供Realtek-RTD2660源代码源程序的下载。该资源文件适用于7至19寸的显示设备,为开发者提供了完整的源代码,方便进行二次开发和定制 项目…...