MATLAB车辆动力学建模 ——《控制系统现代开发技术》
引言
在上这门课之前,我已经用过CasADi 去做过最优化的相关实践,其中每一步迭代主要就是由:对象系统+优化求解两部分组成的。这里我们重点介绍 “对象系统”如何去描述 ,因为它是每一步迭代中重要的一环——“优化求解”会获得控制输入u,u需要作用于模型,获得状态,以去计算目标函数“代价”。在上该课之前,我并没有系统的认识,因此,这门课让我对自己之前的实践有了全新的认识。
致谢
感谢BIT的智能车辆研究所的于会龙老师,其事无巨细的教导,手把手教学让身为研究牲的我感慨万分。
前言
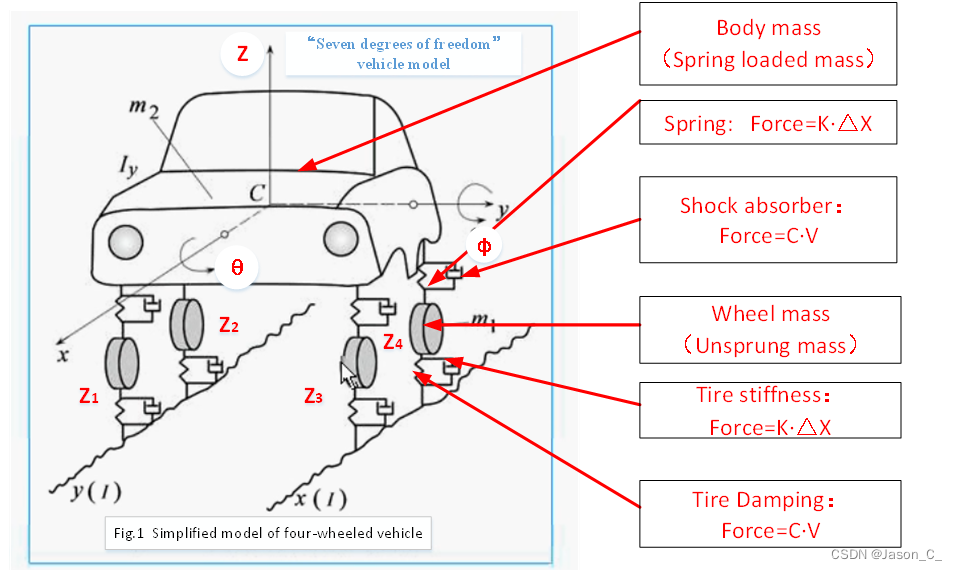
虽然标题是车辆动力学, 但例子是车子的垂向减震系统哈。抱歉
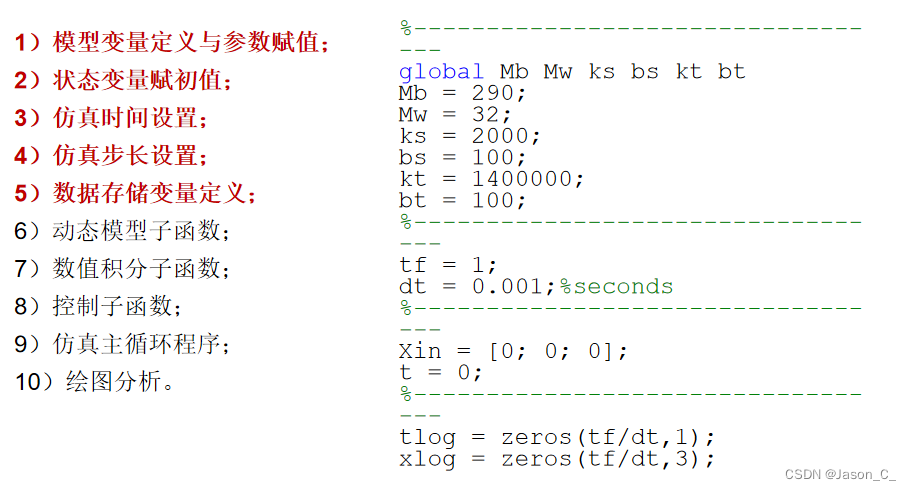
代码流程
这个流程很重要,大家仔细体会。6)-10)步就不放图了,大家直接在后面的代码里寻找对应的部分。
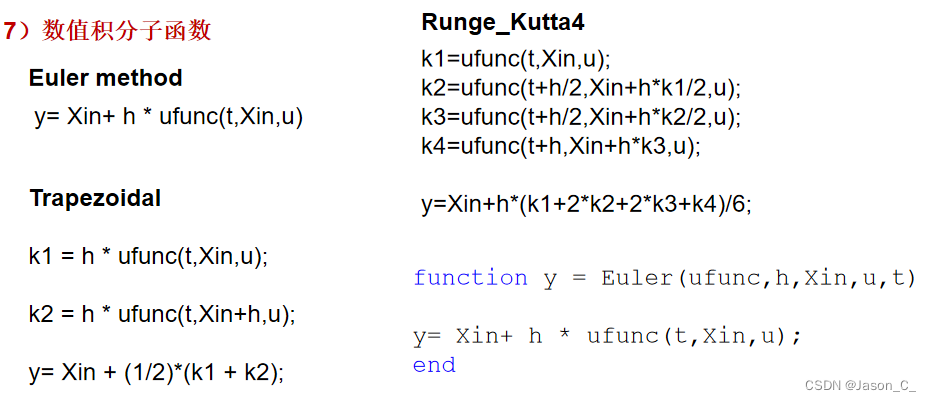
数值积分函数
这里提供了三个选择,matlab中给了4阶龙格库塔和欧拉,大家自行选择
MATLAB代码
clc
clear
clear all
%----------------------------------
global Mb Mw ks bs kt bt
Mb = 290;
Mw = 32;
ks = 20000;
bs = 500;
kt = 1400000;
bt = 100;
%----------------------------------
tf = 1;
dt = 0.001;%seconds
%----------------------------------
Xin = [0; 0; 0];
t = 0;
%----------------------------------
tlog = zeros(tf/dt,1);
xlog = zeros(tf/dt,3);for i = 1: tf/dtu = -0.1 + 0.2*rand; %控制子程序 Xout = Euler(@vdn1,Xin,u,t,dt); %积分函数 tlog(i) = t; %数据存储t = i*dt; %时间更新Xin = Xout; %状态更新xlog(i,:) = Xin'; %数据存储
endfigure
subplot(3,1,1)
plot(tlog,xlog(:,1),'k');
ylabel('$z_b \,(m) $');
xlabel('$$ t \, (s) $$');
subplot(3,1,2)
plot(tlog,xlog(:,2),'r');
ylabel('$ {\dot z_b} \,(m) $');
xlabel('$$ t \, (s) $$');
subplot(3,1,3)
plot(tlog,xlog(:,3),'b');
ylabel('$ {z_r} \,(m) $');
xlabel('$$ t \, (s) $$');function dXin = vdn1(t,Xin,u)
global Mb ks bs
%% 状态变量
Zb = Xin(1,:); %车身垂向位移
dZb = Xin(2,:); %车身垂向速度
Zr = Xin(3,:); %路面接触点垂向位移
%% 求状态变量一阶导数
dZr = u(1,:); %路面接触点垂向位移变化率
ddZb = (-bs.*(dZb-dZr)-ks.*(Zb-Zr))/Mb; %车身垂向加速度%% 状态变量一阶导数
dXin = [dZb;ddZb;dZr];
endfunction [y]=runge_kutta4(ufunc,Xin,u,t,h)% ode45
%-----------------------------------------------------------------------------------%
% Author: HUILONG YU, hlyubit@gmail.com.
% Date : 09/11/2016
% Copyright (C) 2016 HUILONG YU. All Rights Reserved.
%-----------------------------------------------------------------------------------%
k1=ufunc(t,Xin,u);
k2=ufunc(t+h/2,Xin+h*k1/2,u);
k3=ufunc(t+h/2,Xin+h*k2/2,u);
k4=ufunc(t+h,Xin+h*k3,u);y=Xin+h*(k1+2*k2+2*k3+k4)/6;
endfunction y = Euler(ufunc,Xin,u,t,h)y= Xin+ h * ufunc(t,Xin,u);
end补充
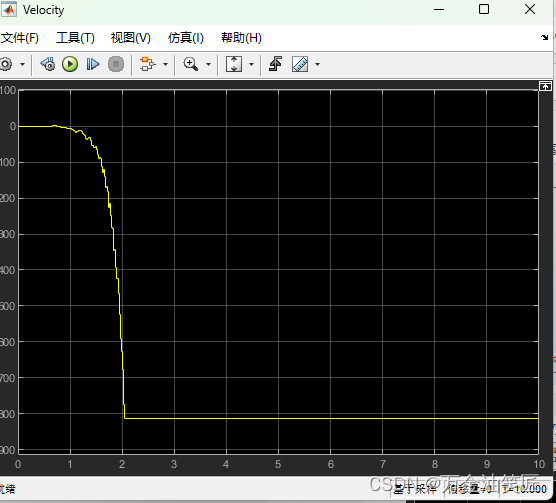
1、参数中有两个关键参数,决定悬架的“硬度”,【调整悬架参数可抑制路面不平度激励带来的车身振动】
ks = 20000; bs = 500;比 ks = 2000000; bs = 100000; 更好
2、程序每次运行结果不同是因为 输入u 里有一个rand随机数。
Python
环境:Windows ,官网安装的python(安装过程中选择将python添加到全局路径) ,在vscode里直接执行。还需要cmd调出终端安装两个py的模块。
pip install numpy matplotlib
import numpy as np
import matplotlib.pyplot as plt# 全局变量
Mb = 290
Mw = 32
ks = 20000
bs = 500
kt = 1400000
bt = 100# 时间设置
tf = 1
dt = 0.001 # 秒# 初始条件
Xin = np.array([0, 0, 0])
t = 0# 数据存储
tlog = np.zeros(int(tf/dt))
xlog = np.zeros((int(tf/dt), 3))# 定义 vdn1 函数
def vdn1(t, Xin, u):Zb = Xin[0] # 车身垂向位移dZb = Xin[1] # 车身垂向速度Zr = Xin[2] # 路面接触点垂向位移dZr = u # 路面接触点垂向位移变化率ddZb = (-bs * (dZb - dZr) - ks * (Zb - Zr)) / Mb # 车身垂向加速度return np.array([dZb, ddZb, dZr])# 定义 Euler 函数
def Euler(ufunc, Xin, u, t, h):return Xin + h * ufunc(t, Xin, u)# 主循环
for i in range(int(tf/dt)):u = -0.1 + 0.2 * np.random.rand() # 控制子程序Xout = Euler(vdn1, Xin, u, t, dt) # 积分函数tlog[i] = t # 数据存储t = (i + 1) * dt # 时间更新Xin = Xout # 状态更新xlog[i, :] = Xin # 数据存储# 绘图
plt.figure()plt.subplot(3, 1, 1)
plt.plot(tlog, xlog[:, 0], 'k')
plt.ylabel('$z_b \,(m)$')
plt.xlabel('$t \,(s)$')plt.subplot(3, 1, 2)
plt.plot(tlog, xlog[:, 1], 'r')
plt.ylabel('$\dot{z_b} \,(m/s)$')
plt.xlabel('$t \,(s)$')plt.subplot(3, 1, 3)
plt.plot(tlog, xlog[:, 2], 'b')
plt.ylabel('$z_r \,(m)$')
plt.xlabel('$t \,(s)$')plt.tight_layout()
plt.show()相关文章:
MATLAB车辆动力学建模 ——《控制系统现代开发技术》
引言 在上这门课之前,我已经用过CasADi 去做过最优化的相关实践,其中每一步迭代主要就是由:对象系统优化求解两部分组成的。这里我们重点介绍 “对象系统”如何去描述 ,因为它是每一步迭代中重要的一环——“优化求解”会获得控制…...
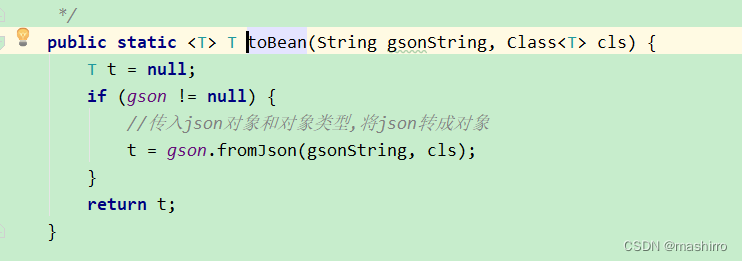
复杂json解析(其中有一个key的value是json格式的字符串)
app上报的参数如下: {"clientId": "8517895440514039afcf6d3e5d7832ae","dua": "SNDOCKCJPH90_GA&VN900042418&BN0&VCXiaomi&MOM2012K11AC&RL1080_2239&CHIDunknown_unknown&LCID&RV&OSAndroid13&…...
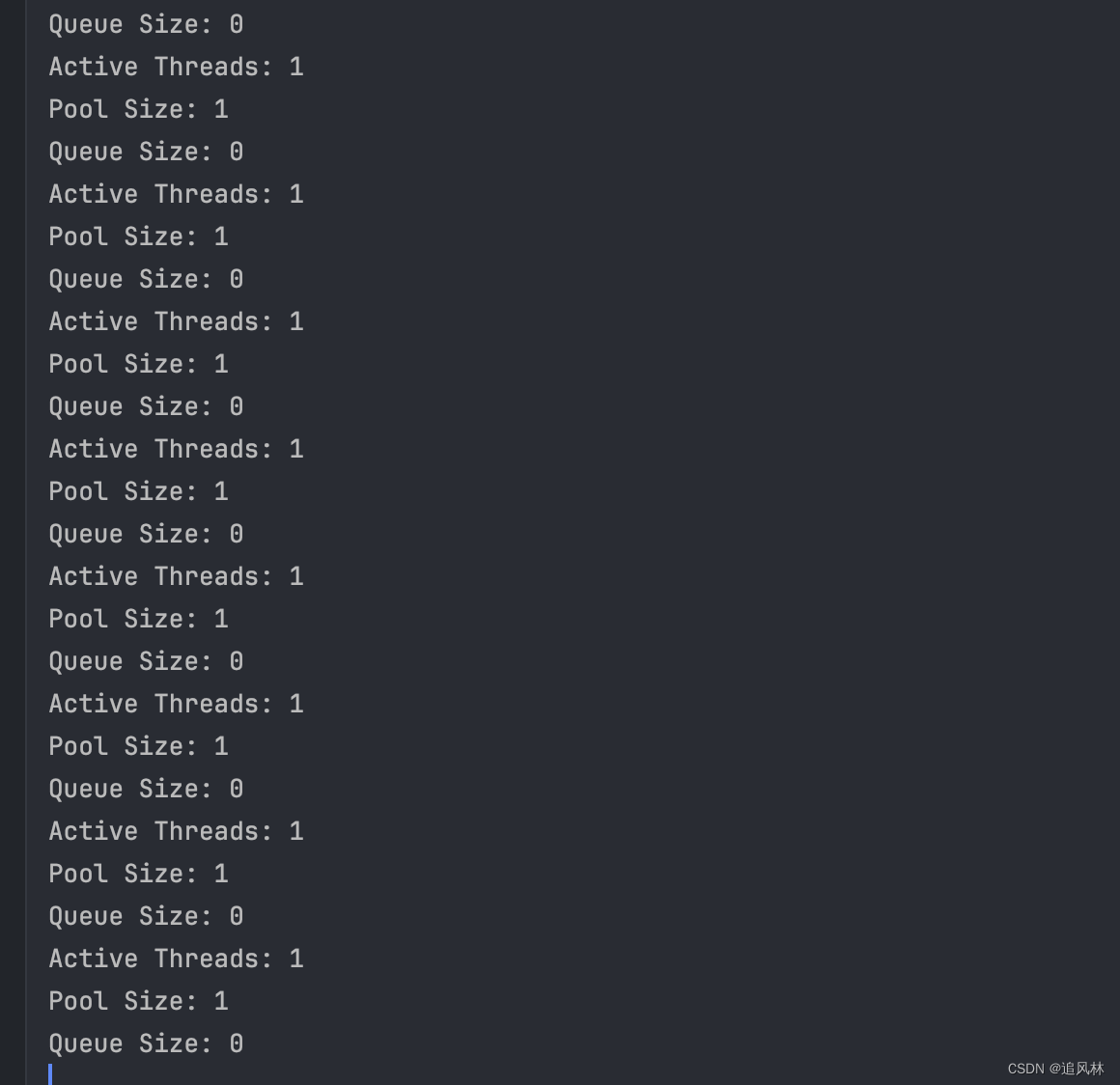
线程池的一些问题
核心线程数1.最大线程5.队列5.存活时间10s 1.场景一 如果核心线程数.被一直占用得不到释放.新进来1个任务.会怎么样?答: 会在队列中中死等. 只要进来的任务.不超过队列的长度,就会一直挡在队列中死等 package com.lin;import java.util.concurrent.Executors; import java.u…...
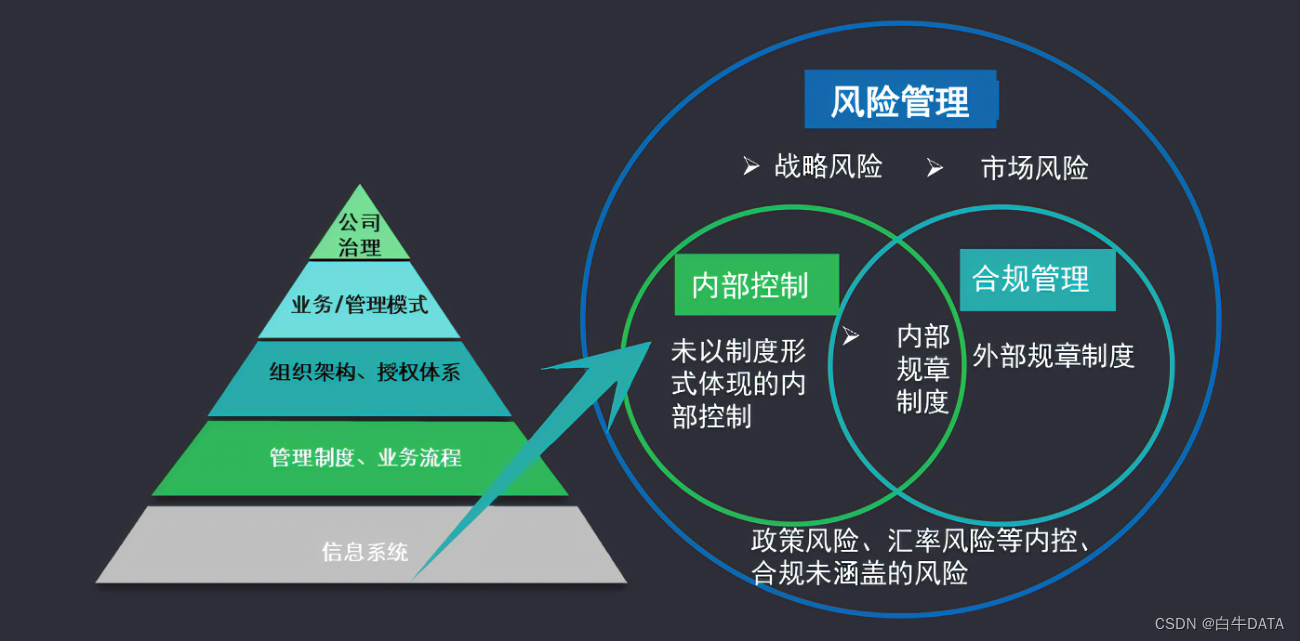
企业或者个体户为什么会经营异常?
在复杂多变的市场经济环境中,无论是企业还是个体工商户,都可能遭遇经营异常的情况。及时识别这些预警信号并采取有效措施,对于避免潜在风险、保持健康发展至关重要。本文将深入探讨企业与个体户常见的经营异常类型、识别方法以及应对策略&…...

ROS从入门到精通4-3:制作Docker镜像文件Dockerfile
目录 0 专栏介绍1 为什么需要Dockerfile?2 Dockerfile书写原则3 Dockerfile常用指令3.1 FROM3.2 MAINTAINER3.3 RUN3.4 ADD3.5 COPY3.6 CMD3.7 ENV3.8 EXPOSE3.9 WORKDIR3.10 ARG 4 Dockerfile构建ROS工程实例 0 专栏介绍 本专栏旨在通过对ROS的系统学习࿰…...

【CV】计算机视觉是什么?
计算机视觉是一门研究如何使机器“看”的学科,旨在实现从图像或视频中获取信息的技术和方法。它涵盖了图像处理、模式识别、机器学习等多个领域,是人工智能领域的重要分支之一。以下是计算机视觉的一般概要介绍: 概要介绍: 图像…...

如何在Vue中实现鼠标悬浮展示与隐藏弹窗的功能
如果你需要鼠标在元素和弹窗上时保持弹窗显示,而鼠标离开这两者时隐藏弹窗,你可以使用一个稍微复杂的逻辑来处理鼠标的进入和离开事件。 这通常涉及到延时关闭弹窗,以便给用户足够的时间从元素移动到弹窗上,而不触发弹窗关闭。以…...
03 Linux编程-进程
1、进程的相关概念 1.1 程序与进程 程序是静态的概念,进程是程序的一次运行活动。 1.2 查看系统中有哪些进程 ps #只显示一小部分进程 ps -aux #会打印当前所有进程 ps -aux|grep init #使用grep筛选出只含有init的进程top #运行显示的进程有点类似windows…...
Hbuild-X运行ios基座app
一、说明 ios真机第一次运行的时候需要下载插件,这个都是自动监测,自动下载的,不用多说。ios真机运行是需要签名的,不然就会报以下错误。如何制作免费的签名证书呢,需要借助爱思助手来完成。 二、安装爱思助手 &…...

Node.js基础:从入门到实战
初识 Node.js 与内置模块 (初识) 1、知道什么是node.js 2、知道node.js可以做什么 3、node.js 中js的组成部分 (内置模块) 4、用 fs 模块读写操作文件 5、使用 path 模块处理路径 6、使用http 模块写一个基本的web服务器 初识 N…...

考研408笔记总结~
目录 一.数据结构 二.计算机组成原理 三.操作系统 四.计算机网络 私以为边看视频,边做笔记会更专注些,大家需要自取。欢迎大家和我一起探讨考研的问题,包括不仅限于专业课,数学,英语等等......,想说什么…...

使用在线工具等方式下载推特视频
使用在线工具等方式下载推特视频 使用在线工具 Visit a Twitter video downloader website: Websites like twdown.net, twittervideodownloader.com, and savevideo.me offer services to download Twitter videos.Paste the Twitter video URL into the designated input bo…...

性能优化:几方面考虑
我们可以继续再考虑下关于性能优化,我们还能从哪些方面着手呢? 1. 代码层面: 使用更高效的数据结构和算法。使用缓存避免多次数据库交互减少不必要的计算和内存分配。利用并行和异步编程提高性能。使用性能分析工具定位和优化瓶颈。 2. We…...

学习大数据:论学习Spark的重要性
随着科技的不断发展,大数据已经成为了当今社会的热门话题。大数据技术的出现,为我们提供了处理海量数据的新方法,使得我们能够从这些数据中挖掘出有价值的信息。在众多的大数据处理框架中,Apache Spark无疑是最为出色的一种。本文…...

学习java第七十一天
DI:依赖注入 依赖注入是spring容器中创建对象时给其设置依赖对象的方式,比如给spring一个清单,清单中列出了需要创建B对象以及其他的一些对象(可能包含了B类型中需要依赖对象),此时spring在创建B对象的时候…...

Altium Designer PCB快捷键设置
6)PCB修改快捷键,并自定义工具栏 添加boardlayerset系统命令。 修改系统脚本, 在D:\Program Files\Altium\AD18\System下,找到advpcb.rcs文件,打开。 Tree MNPCB_LayerSets CaptionManage Layer Se&ts Popup Emp…...
玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(案例实战)
** 玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(案例实战) ** 目录 玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真&…...
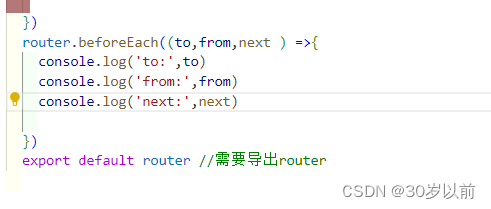
vue嵌套路由
一、嵌套 children配置 1.父类路由 mymusic 2.子类路由 musicson 1.创建MusicSon组件 <template><div><p>从前和后来</p><p>唯一</p><p>运气来的似有若无</p></div> </template><script>export defaul…...
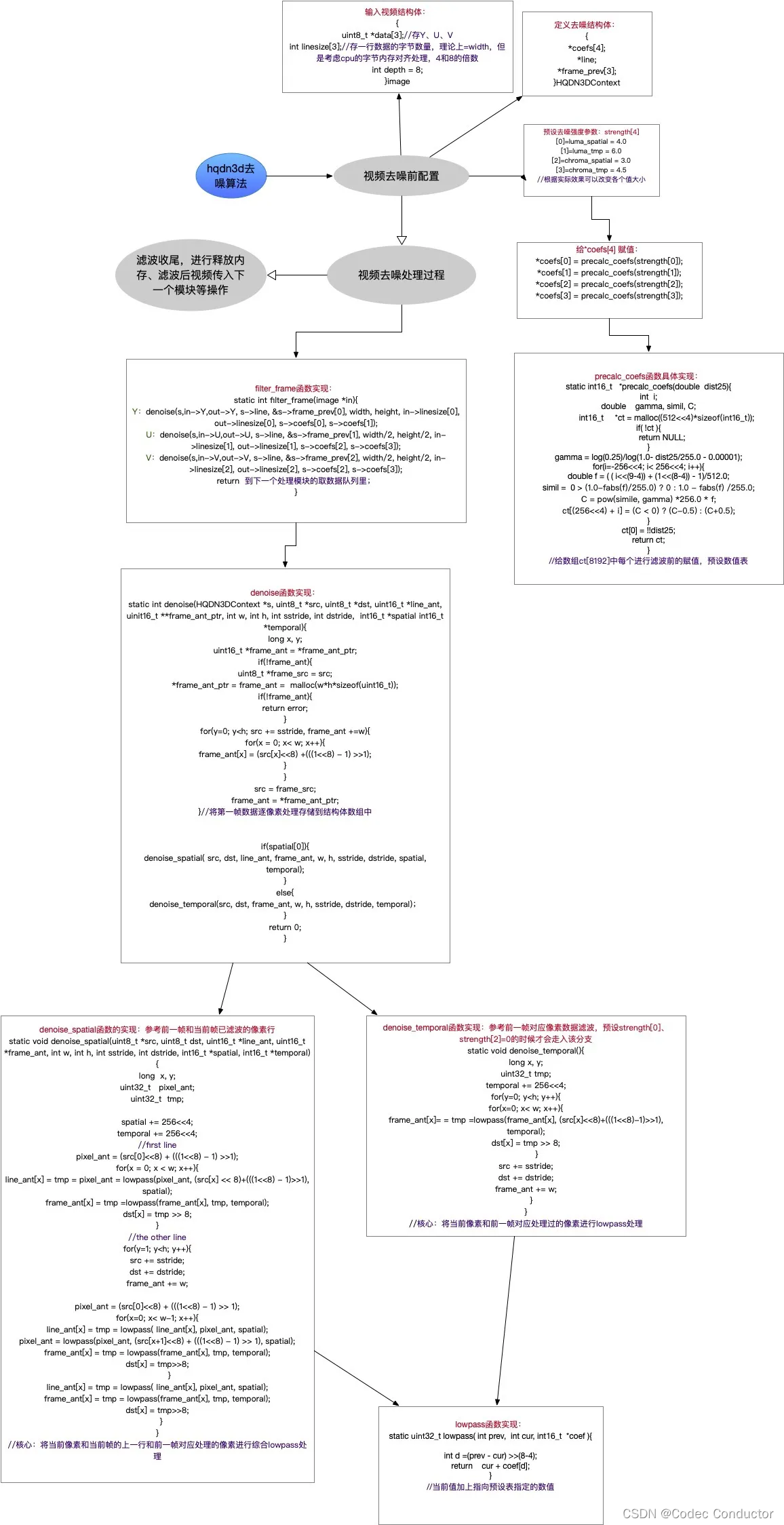
视频降噪算法 hqdn3d 原理分析
视频降噪 视频降噪是一种处理技术,旨在减少视频中的噪声,提高画面质量。噪声可能来自多种源头,包括摄像机的传感器、压缩算法、传输过程中的干扰等。降噪处理对于视频监控、视频会议、电影后期制作以及任何需要高画质输出的应用场景都非常重…...
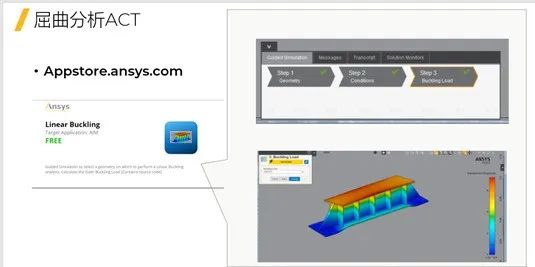
Ansys Mechanical|屈曲分析技术
屈曲分析的基本概念 当受拉杆件的应力达到屈服极限或强度极限时,将引起塑性变形或断裂。这些是由于强度不足所引起的失效。 在工程中,我们会注意到当细长杆件受压时,表现出与强度失效完全不同的性质。当杆件受压超过某一临界值时࿰…...

Java并发编程:CompletableFuture实战
Java并发编程:CompletableFuture实战 引言 Java 8引入的CompletableFuture是现代异步编程的重要工具,它不仅解决了Future的局限性,还提供了丰富的API用于组合、转换和处理异步结果。相比传统的Future,CompletableFuture支持流式调…...

VectorDBBench:向量数据库性能基准测试工具详解与实战
1. 项目概述:向量数据库性能测试的“瑞士军刀”如果你正在评估或使用向量数据库,那么你一定遇到过这个灵魂拷问:“这么多产品,到底哪个最适合我的场景?”是选名声在外的老牌劲旅,还是选后起之秀的专精选手&…...

Path of Building:3个步骤从Build小白到规划大师的完整指南
Path of Building:3个步骤从Build小白到规划大师的完整指南 【免费下载链接】PathOfBuilding Offline build planner for Path of Exile. 项目地址: https://gitcode.com/GitHub_Trending/pa/PathOfBuilding Path of Building作为流放之路玩家最信赖的Build规…...

从零构建专属大语言模型:Self-LLM开源项目全流程实践指南
1. 项目概述与核心价值最近在开源社区里,一个名为datawhalechina/self-llm的项目引起了我的注意。乍一看,这像是一个关于大语言模型(LLM)的仓库,但“self”这个前缀又让人浮想联翩。经过一段时间的深入研究和实践&…...

KIVI开源工具箱:模块化设计赋能开发者效率提升
1. 项目概述:一个面向开发者的开源工具箱最近在GitHub上闲逛,发现了一个挺有意思的项目,叫KIVI。第一眼看到这个名字,我以为是某种新的UI框架或者设计系统,毕竟“KIVI”听起来有点像是“Kiwi”的变体,容易联…...
基于CircuitPython与NeoPixel打造可编程LED亚克力灯牌:从硬件选型到代码实现
1. 项目概述:打造你的专属可编程光之铭牌在创客和电子爱好者的世界里,总有一些项目能完美地融合软件编程的灵活性与硬件制作的实体成就感。今天要分享的,就是这样一个让我爱不释手的小玩意儿:一个基于CircuitPython和NeoPixel的可…...

告别命令行启动!在Ubuntu 20.04上为Clion创建桌面快捷方式的保姆级教程
告别命令行启动!在Ubuntu 20.04上为Clion创建桌面快捷方式的保姆级教程 每次打开Clion都要在终端输入./clion.sh?作为从Windows转战Linux的开发者,这种操作简直让人抓狂。本文将彻底解决这个痛点,手把手教你用.desktop文件创建专业…...

从“客户匿名”到“可验证”:技术服务案例的工程化写法
在撰写技术服务案例时,我们经常面临一个挑战:客户要求匿名,但案例又需要让潜在客户相信效果。如何平衡?结合文澜天下科技在AI搜索优化项目中的实践,分享一种“可验证”的案例写法。一、定位具体行业和场景 不写“某教育…...

APK安装器终极指南:3种方法让Windows电脑秒变安卓设备
APK安装器终极指南:3种方法让Windows电脑秒变安卓设备 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer APK安装器是一款专为Windows用户设计的安卓应用安装工…...

影刀RPA跨境店群运营架构:基于Python的高并发环境隔离与自动化调度系统设计实战
关于我一个曾经死磕底层算法、痴迷于压榨软硬件性能的资深架构师,最后跑去给跨境工作室写店群底层自动化调度系统这件事。 很多以前在技术圈里混的同行,或者是看着我一路从后端重构做到 ImageTransPro 图像处理软件 5.0.3 这种复杂版本迭代的极客朋友们…...