三维空间坐标系变换(旋转平移)
在探究三维空间下的变换前,首先研究二位空间,因为比较直观,再推广到三维空间。
首先应该清楚的一点是:旋转、平移对于坐标系下的点以及坐标系本身而言都是相对的(运动的相对性)。
例如:
- X O Y XOY XOY坐标系不动,点 P ( x , y ) P(x, y) P(x,y)沿
顺时针方向旋转 θ \theta θ,得到点 P ′ P' P′,此时点 P ′ P' P′在 X O Y XOY XOY坐标系的坐标为 ( x ′ , y ′ ) (x', y') (x′,y′); - 点 P ( x , y ) P(x, y) P(x,y)不动,坐标轴 X O Y XOY XOY沿着
逆时针方向旋转 θ \theta θ,得到坐标轴 X ′ O Y ′ X'OY' X′OY′,此时点 P P P在 X ′ O Y ′ X'OY' X′OY′下的坐标为 ( x ′ , y ′ ) (x', y') (x′,y′)。
这两条命题是等价的。
因此,仅讨论坐标系变换。
二维空间下的坐标系变换
平移:
旋转:
注:图片来源https://www.cnblogs.com/meteoric_cry/p/7987548.html
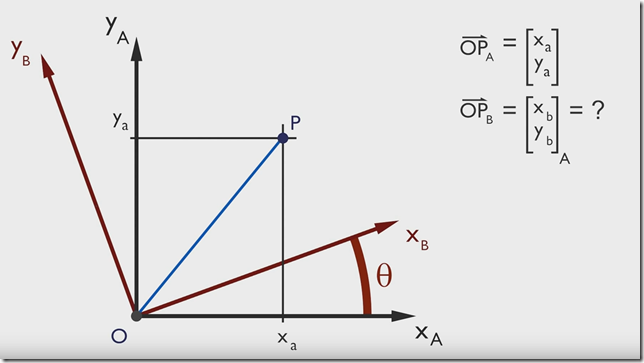

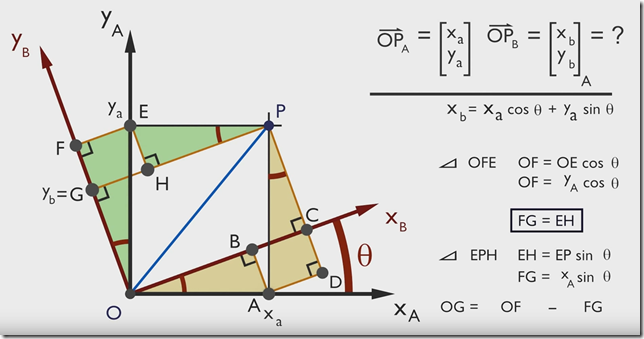
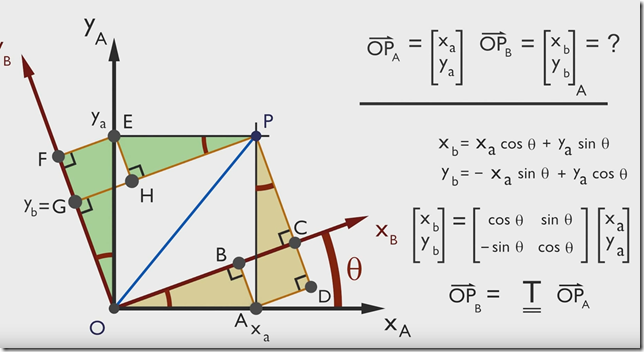
所以对于二维旋转来讲,旋转可描述为:设点 P P P在 X O Y XOY XOY坐标系下坐标为 [ x y ] \begin{bmatrix} x \\ y \end{bmatrix} [xy],将坐标系 X O Y XOY XOY顺时针旋转 θ \theta θ后, P P P点坐标为 [ x ′ y ′ ] \begin{bmatrix} x' \\ y' \end{bmatrix} [x′y′],则有:
[ x ′ y ′ ] = [ c o s θ − s i n θ s i n θ c o s θ ] [ x y ] \begin{bmatrix} x' \\ y' \end{bmatrix} =\begin{bmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy]
旋转矩阵可记为: Q = [ c o s θ − s i n θ s i n θ c o s θ ] Q = \begin{bmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{bmatrix} Q=[cosθsinθ−sinθcosθ]
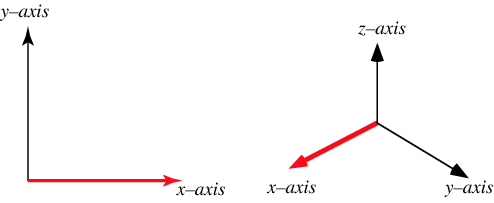
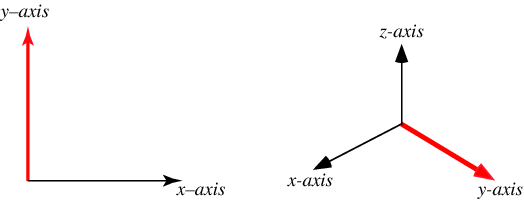
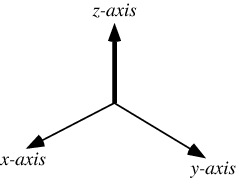
三维空间下的坐标系变换
平移:
旋转:
三维空间下,当固定轴选定后,旋转就等价于:其余两轴在其平面内的(二维)旋转。
假设以逆着固定轴正向的方向看去的顺时针为旋转的正向。
-
绕 x x x轴旋转 α \alpha α(在 y z yz yz平面顺时针旋转):
则旋转前后的坐标变化可描述为:
[ x ′ y ′ x ′ 1 ] = [ 1 0 0 0 0 c o s α − s i n α 0 0 s i n α c o s α 0 0 0 0 1 ] [ x y x 1 ] \begin{bmatrix} x' \\ y' \\ x' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & cos\alpha & -sin\alpha & 0 \\ 0 & sin\alpha & cos\alpha & 0 \\ 0 &0 & 0& 1\end{bmatrix} \begin{bmatrix} x \\ y \\ x \\ 1 \end{bmatrix} x′y′x′1 = 10000cosαsinα00−sinαcosα00001 xyx1 -
绕 y y y轴旋转 β \beta β(在 x z xz xz平面顺时针旋转):
则旋转前后的坐标变化可描述为:
[ x ′ y ′ x ′ 1 ] = [ c o s β 0 s i n β 0 0 1 0 0 − s i n β 0 c o s β 0 0 0 0 1 ] [ x y x 1 ] \begin{bmatrix} x' \\ y' \\ x' \\ 1 \end{bmatrix} = \begin{bmatrix} cos\beta & 0 & sin\beta & 0 \\ 0 & 1 & 0 & 0 \\ -sin\beta & 0 & cos\beta & 0 \\ 0 &0 & 0& 1\end{bmatrix} \begin{bmatrix} x \\ y \\ x \\ 1 \end{bmatrix} x′y′x′1 = cosβ0−sinβ00100sinβ0cosβ00001 xyx1 -
绕 z z z轴旋转 γ \gamma γ(在 x y xy xy平面顺时针旋转):
则旋转前后的坐标变化可描述为:
[ x ′ y ′ x ′ 1 ] = [ c o s γ − s i n γ 0 0 s i n γ c o s γ 0 0 0 0 1 0 0 0 0 1 ] [ x y x 1 ] \begin{bmatrix} x' \\ y' \\ x' \\ 1 \end{bmatrix} = \begin{bmatrix} cos\gamma & -sin\gamma & 0 & 0 \\ sin\gamma & cos\gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 &0 & 0& 1\end{bmatrix} \begin{bmatrix} x \\ y \\ x \\ 1 \end{bmatrix} x′y′x′1 = cosγsinγ00−sinγcosγ0000100001 xyx1
综上,当坐标系沿着 X , Y , Z X,Y,Z X,Y,Z轴分别旋转 α , β , γ \alpha,\beta,\gamma α,β,γ后,旋转矩阵为3个沿单一坐标轴旋转的旋转矩阵的乘积,前后的坐标变化可描述为:
Reference:
- 旋转矩阵(Rotation Matrix)的推导及其应用
- Wolfram MathWorld: Rotation Matrix
- 3d变换基础:平移、旋转、缩放(仿射变换)详解——公式推导
相关文章:
三维空间坐标系变换(旋转平移)
在探究三维空间下的变换前,首先研究二位空间,因为比较直观,再推广到三维空间。 首先应该清楚的一点是:旋转、平移对于坐标系下的点以及坐标系本身而言都是相对的(运动的相对性)。 例如: X O Y …...
OC笔记之foundation框架
OC学习笔记(三) 文章目录 OC学习笔记(三)常用Foundation框架结构体NSRangeNSRange结构体的定义定义 NSRange 的方法打印Range的相关信息NSRange的实际运用查找子字符串返回NSRange结构体 NSPointNSRect NSStringNSString的创建NSS…...
Docker部署springboot包并联通MySQL
Docker部署jar 实现功能 部署springboot下发布的jar包不同docker容器之间通信(如MySQL访问、Redis访问)多个jar包部署 参考文献 Just a moment… Just a moment… https://www.jb51.net/article/279449.htm springboot配置 这里使用多yaml配置文件&…...

多帧激光点云基于标定参数进行融合拼接
1、前言 在三维视觉技术蓬勃发展的今天,点云作为捕获和表示三维环境的基础数据形式,扮演着至关重要的角色。点云融合拼接技术,作为连接孤立点云片段、构建连续、全面三维场景的核心过程,对于自动驾驶、机器人导航、三维建模以及地…...

python数据类型之字符串
目录 1.字符串概念和注意事项 2.字符串内置函数 3.字符串的索引、切片和遍历 4.字符串运算符 5.字符串常用方法 性质判断 开头结尾判断 是否存在某个子串 大小写等格式转化 子串替换 删除两端空白字符 格式化字符串 分割与合并 6.字符串模板 7.exec 函数 8.字符…...

Vue3实战笔记(38)—粒子特效终章
文章目录 前言一、怎样使用官方提供的特效二、海葵特效总结 前言 官方还有很多漂亮的特效,但是vue3只有一个demo,例如我前面实现的两个页面就耗费了一些时间,今天记录一下tsparticles官方内置的几个特效的使用方法,一般这几个就足…...
晶体振荡器
一、晶振与晶体区别 晶振是有源晶振的简称,又叫振荡器,英文名称是oscillator,内部有时钟电路,只需供电便可产生振荡信号;晶体是无源晶振的简称,也叫谐振器,英文名称是crystal,是无极…...
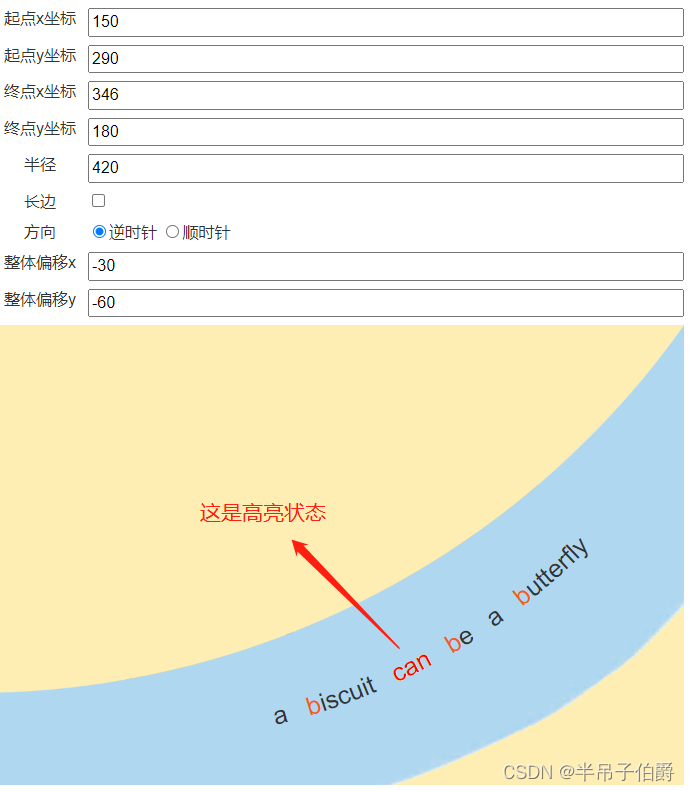
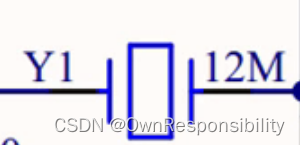
单词可交互的弧形文本
在一个项目中,要求把少儿读本做成电子教材呈现出来,电子书的排版要求跟纸质书一致。其中,英语书有个需求:书中有些不规则排版的文本(如下图所示),当随书音频播放时,被读到的文本要求…...
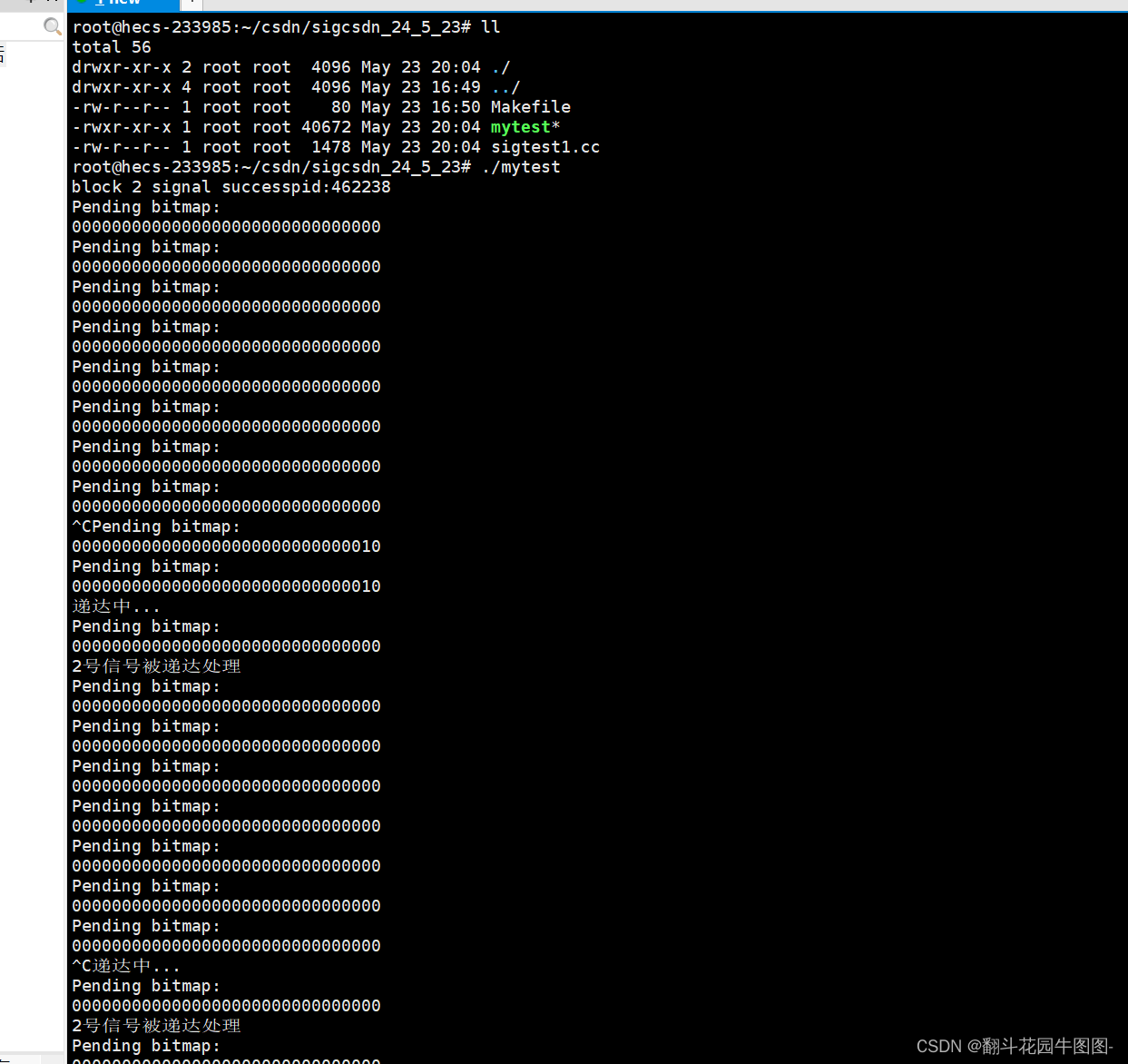
Linux——进程信号(一)
1.信号入门 1.1生活中的信号 什么是信号? 结合实际红绿灯、闹钟、游戏中的"!"等等这些都是信号。 以红绿灯为例子: 一看到红绿灯我们就知道:红灯停、绿灯行;我们不仅知道它是一个红绿灯而且知道当其出现不同的状况…...
)
centos9 stream在线安装NVIDIA驱动(rockylinux9.4也成功安装nvidia驱动)
Install NVIDIA Drivers on CentOS Stream 9(rockylinux9.4成功) 主板为技嘉mz72-hb2 显卡为4090 一.Disable Secure Boot From the BIOS 二.Enabling the EPEL Repository on CentOS Stream 9 1.update the DNF package repository cache sudo dnf …...

springmvc不同格式的参数解析
参数解析 application/x-www-form-urlencoded格式 这种格式就是传统的表单提交格式,就是一个个的键值对,会进行url编码,使用springmvc接收时使用RequestParam来进行接收,与传入的字段一一对应,此时使用的参数处理器是R…...

Unity3D让BoxCollider根据子物体生成自适应大小
系列文章目录 unity工具 文章目录 系列文章目录unity工具 👉前言👉一、编辑器添加👉二、代码动态添加的方法(第一种)👉三、代码动态添加的方法(第二种)👉四、重新设置模型的中心点👉壁纸分享👉…...
WSL 2 installation is incomplete.
使用的wsl2版本很旧,因此需要手动更新。 https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi...
Servlet的request对象
request对象的继承关系 1.HttpServletRequest接口继承了ServletRequest接口,对其父接口进行了扩展,可以处理满足所有http协议的请求 2.HttpServletRequest和ServletRequest都是接口,不能创建对象,因此在tomcat底层定义实现类并创…...

蓝桥杯-合并数列
小明发现有很多方案可以把一个很大的正整数拆成若干正整数的和。他采取了其中两种方案,分别将它们列为两个数组 {a1, a2, …, an} 和 {b1, b2, …, bm}。两个数组的和相同。 定义一次合并操作可以将某数组内相邻的两个数合并为一个新数,新数的值是原来两…...

《web应用技术》第9次课后作业
一、将前面的代码继续完善功能 1、采用XML映射文件的形式来映射sql语句; 2、采用动态sql语句的方式,实现条件查询的分页。 二、学习git的使用。 1、每个小组将自己的项目上传到gitee,学会协作开发; 2、学会从gitee上拉取项目…...
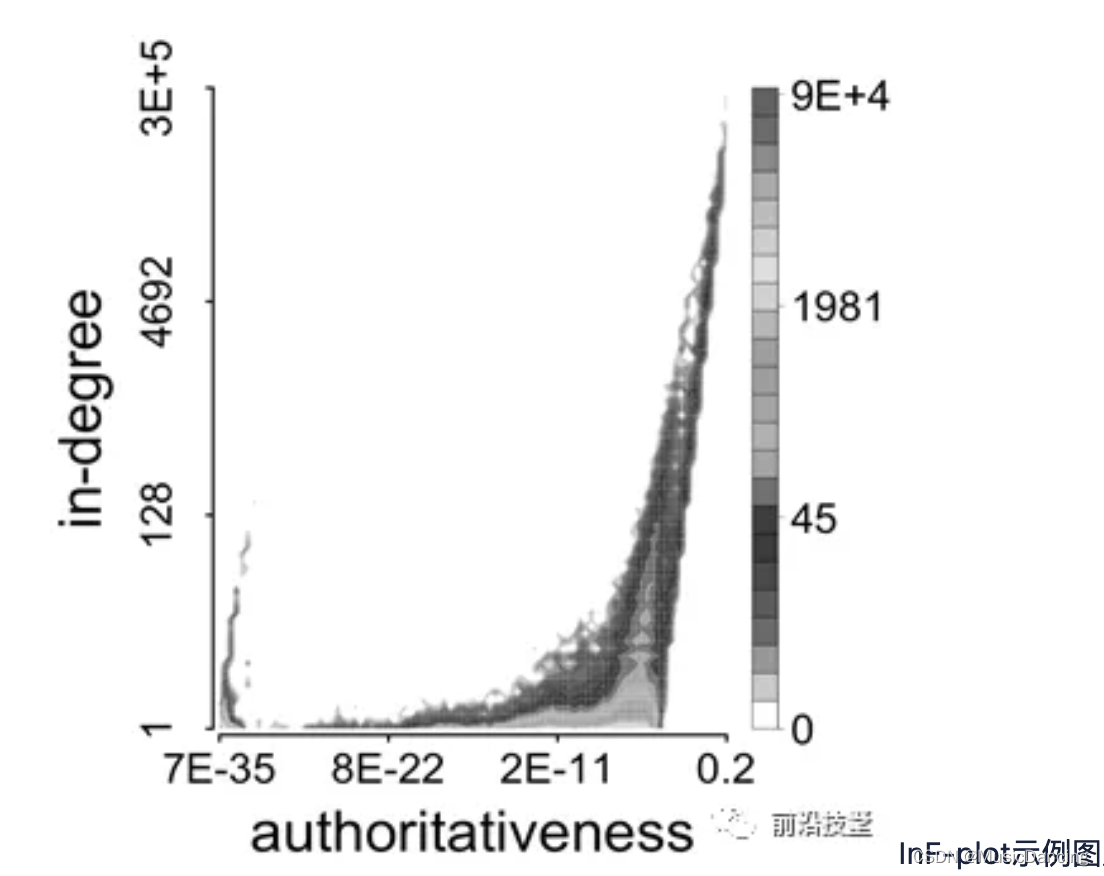
FRAUDARCatchSync算法简介
参考:https://blog.51cto.com/u_15127663/2778705 1. 背景 Fraudar 要解决的问题是:找出社交网络中最善于伪装的虚假用户簇。虚假用户会通过增加和正常用户的联系来进行伪装,而这些伪装(边)会形成一个很密集的子网络,可以通过定义…...
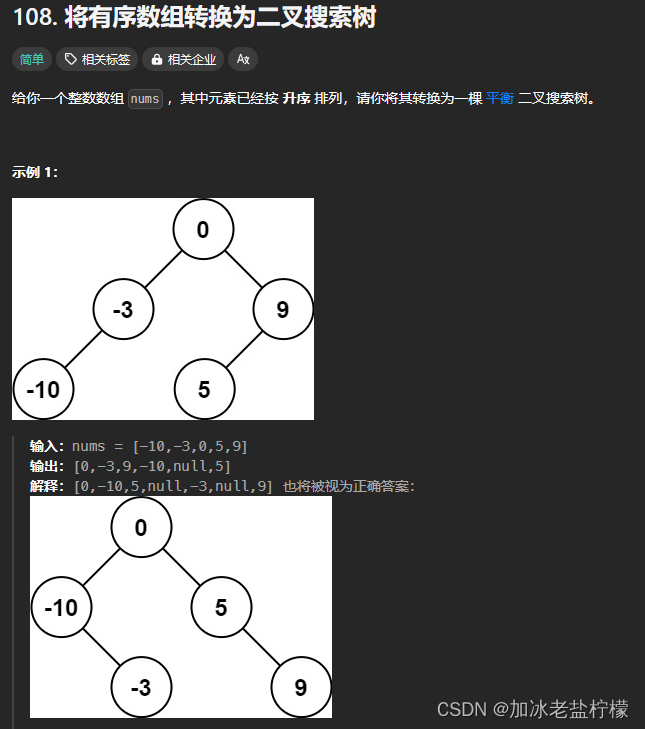
刷题之将有序数组转换成二叉搜索树(leetcode)
将有序数组转换成二叉搜索树 正常递归,中序遍历 递归经常会把自己绕晕,还是得画图分析 /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(null…...
)
K-means聚类模型教程(个人总结版)
K-means聚类是一种广泛应用于数据挖掘和数据分析的无监督学习算法。它通过将数据点分成K个簇(cluster),使得同一簇内的数据点之间的相似度最大,不同簇之间的相似度最小。本文将详细介绍K-means聚类算法的背景、基本原理、具体实现…...

android怎么告诉系统不要回收
在Android中,如果你想告诉系统不要回收你的应用程序,可以通过设置Activity的属性来实现。你可以设置android:configChanges属性,指定在哪些配置更改时不重新创建Activity。 例如,如果你想指示系统在屏幕方向更改时不要重新创建Ac…...

Seraphine终极指南:英雄联盟智能助手如何提升您的游戏胜率
Seraphine终极指南:英雄联盟智能助手如何提升您的游戏胜率 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 在英雄联盟的激烈对局中,错过对局接受、BP阶段犹豫不决、缺乏队友对手信息&a…...

脉冲神经网络与神经形态计算的能效优化实践
1. 脉冲神经网络与神经形态计算基础脉冲神经网络(SNN)作为第三代神经网络模型,其核心在于模拟生物神经系统的信息处理机制。与传统人工神经网络(ANN)相比,SNN具有三个本质区别:首先,…...

避坑指南:在Unity 2022 LTS中配置XCharts插件时遇到的3个常见问题及解决方法
Unity 2022 LTS中XCharts插件实战避坑手册 当数据可视化成为现代应用的核心需求时,Unity开发者常会选择XCharts这类开源图表插件来快速实现专业级图表展示。但在实际项目落地过程中,版本兼容性、环境配置和平台适配等问题往往会让开发进程意外卡壳。本文…...

开源PCB自动布线神器FreeRouting:5分钟上手,效率提升300%
开源PCB自动布线神器FreeRouting:5分钟上手,效率提升300% 【免费下载链接】freerouting Advanced PCB auto-router 项目地址: https://gitcode.com/gh_mirrors/fr/freerouting FreeRouting是一款功能强大的开源PCB自动布线工具,它能帮…...

[具身智能-766]:机器人在运动过程中需要实时定位,AMCL 每一次都需要全局撒粒子重搜吗?还是一旦定位后,后续的移动过程中,只需要局部匹配?
直白结论完全不需要每次全局撒粒子重搜定位成功稳定后,机器人全程只做局部小范围匹配,只有丢位置、被挪动时,才会重新全局撒粒子搜索。一、分两种状态1. 正常行走(已定位成功)粒子只聚集在机器人真实位置周边很小一片区…...

智能合约赋能AI代理:构建可验证、可审计的自动化工作流
1. 项目概述:当技能遇上智能合约最近在探索AI代理(AI Agent)的落地应用时,我遇到了一个非常有意思的项目:saralobo/skill-ai-execution-contract。这个项目名字乍一看有点长,但拆解开来,核心是“…...

Arm Neoverse CMN-700一致性网格网络架构与寄存器配置详解
1. Arm Neoverse CMN-700一致性网格网络架构解析 在现代多核处理器设计中,一致性网格网络(Coherent Mesh Network)已成为解决核间通信瓶颈的关键技术。Arm Neoverse CMN-700作为第二代一致性互连架构,相比前代CMN-600在拓扑灵活性…...

神经网络建筑负荷预测与供暖优化【附程序】
✨ 长期致力于BP神经网络、负荷预测、空气源热泵、优化控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于BP神经网络的公共建筑热负荷预测模型&…...

Windows11下DOSBox从零到精通的完整配置与实战指南
1. 为什么要在Windows11上使用DOSBox? 很多年轻朋友可能都没见过DOS系统长什么样。作为上世纪80年代到90年代的主流操作系统,DOS虽然界面简陋,但它孕育了无数经典软件和游戏。直到今天,学习汇编语言、运行老式工业控制程序、怀旧经…...
)
从FreeRTOS到RT-Thread:手把手教你正确使用操作系统的动态内存API(避坑malloc)
从FreeRTOS到RT-Thread:嵌入式实时操作系统动态内存管理实战指南 在嵌入式开发领域,动态内存管理一直是开发者面临的棘手问题之一。当项目从裸机迁移到实时操作系统(RTOS)环境时,许多开发者会不自觉地延续使用标准C库的…...