UMPNet: Universal Manipulation Policy Network for Articulated Objects
1. 摘要
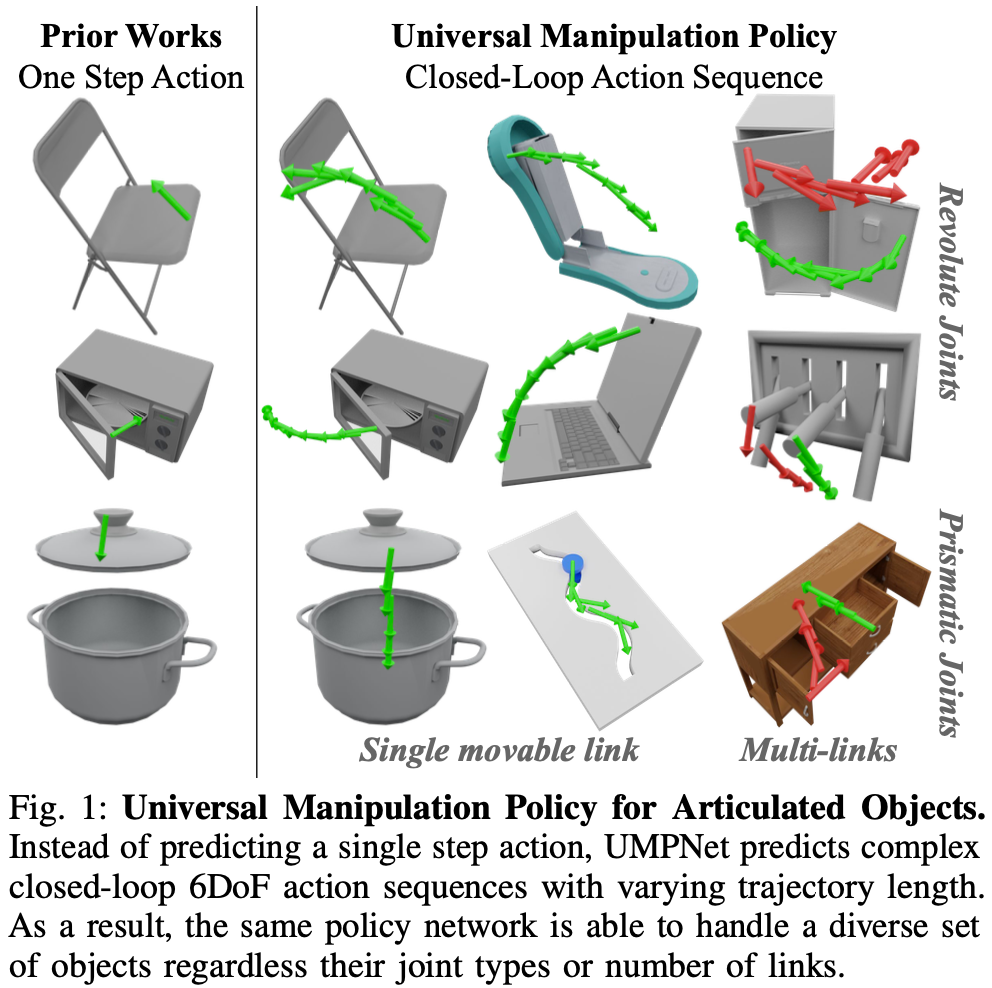
UMPNet是一个基于图像的策略网络,能够推理用于操纵铰接物体的闭环动作序列。该策略支持6DoF动作表示和可变长度轨迹。
为处理多种类的物体,该策略从不同的铰接结构中学习,并泛化到未见过的物体或类别上。该策略是以自监督探索的方式进行学习的,无需任何注释、脚本或预定义的目标。
为了支持多步交互,引入了一个新的Arrow-of-Time动作属性,用以指示某个动作是否会使得物体状态倒退(到过去的状态)或前进(到未来的状态)。通过在每一个交互步中使用这个Arrow-of-Time推理,学习到的策略能够选择朝向/远离给定的状态,实现高效的状态探索和基于目标的操纵。
这应该比VAT-MART还要早,因为是基于目标的,所以相对于Where2Act的改进就是可以生成动作轨迹,而不是单一的动作执行朝向。
2. 引言
UMPNet (Universal Manipulation Policy Network)通用操作策略网络,是一个简单的策略网络,通过视觉观测来探索铰接结构物体的可能的操作策略。由策略网络推断的行动轨迹有如下属性:
2.1. 通用动作表示
使用SE(3)变换来表示一个铰接的动作。
2.2. 闭环行为序列
预测单步的动作是比较简单的,本文关注的是一个序列的动作。但是,由于误差累积和部分观测的原因,这是很有挑战的。所以用闭环的方式来解决这一难题,即每次都使用初始状态和当前状态来预测一步的动作。
2.3. 时间箭头意识
大部分动作都是双向有效的。例如,对门来说,下一时刻既可能是开门(开合角度变大)或关门(开合角度变小),所以需要把历史信息记录下来(称之为时间箭头),它能够指引下一步动作是向前(开门)还是向后(关门)。
3. 方法
操纵策略π的目标是生成与随机铰接物体交互的动作序列,得到未见过的新状态。
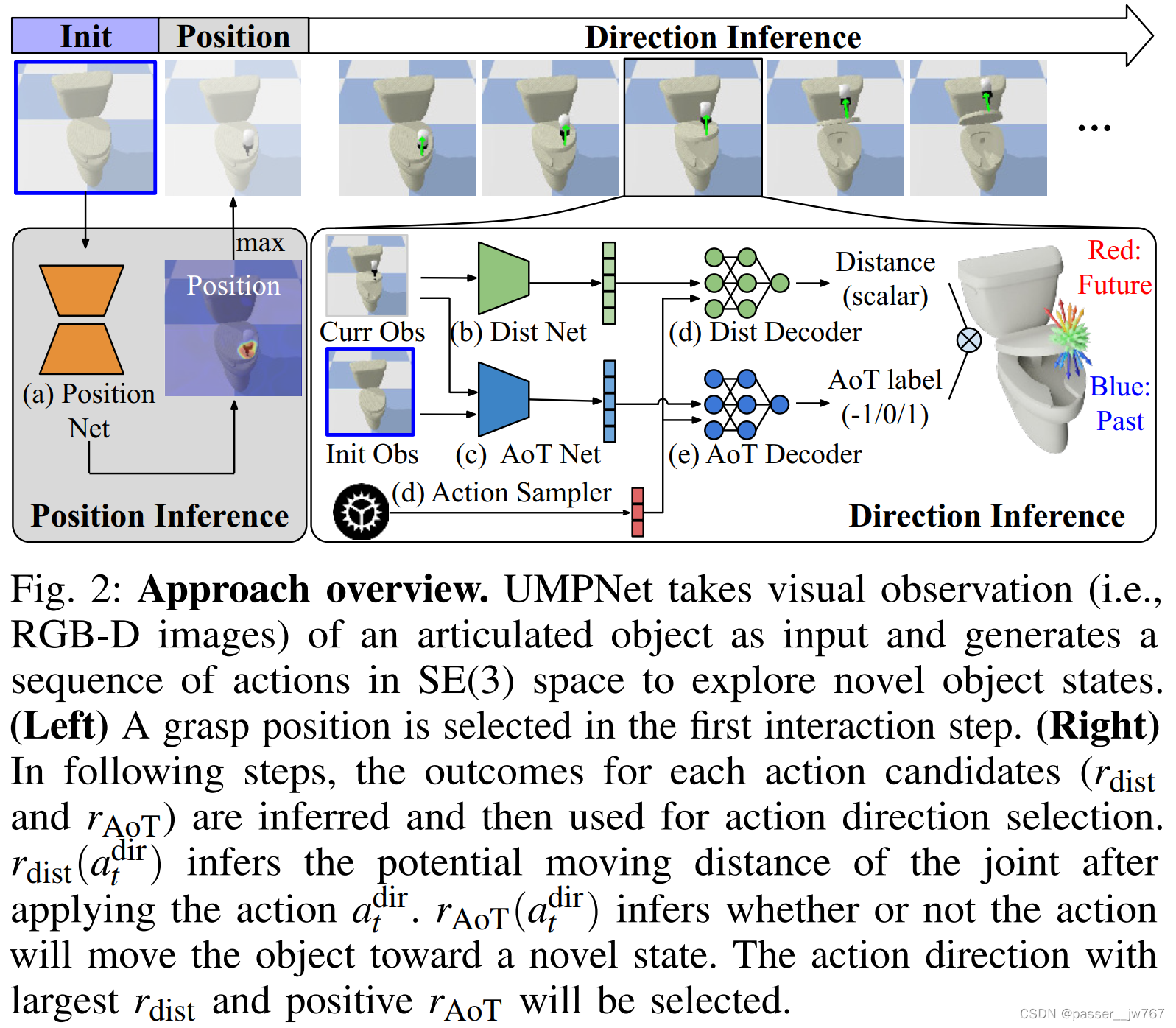
以图2为例,为了高效探索物体(马桶为例)的新状态,算法如下:
- 选择物体上正确的位置进行交互(即,与马桶盖交互而不是基);
- 选择正确的动作方向(即,拉起来,而不是向下推);
- 在接下来的动作中选择一致的动作,以探索新的状态(即,保持向上拉盖子,而不是上下移动盖子);
这三个需求对应算法中的3个关键部分:(1)运动位置选择;(2)运动距离;(3)Arrow-of-Time推理用于动作方向选择。
结合这三个部分,最后的系统能够通过自引导的探索过程来学习,而不需要显式的人类注释、脚本策略或预定义的目标情况。
3.1. 问题定义
输入是处于当前状态的一张RGBD图像
,智能体通过策略 π \pi π生成每一步的动作
。该动作是在SE(3)空间中表示的,参数化为end-effector位置(吸式夹持器)和移动方向:
,
是一个3D坐标,
是一个单位向量,用于指示end-effector的移动方向。
在第一个交互步骤,策略选择一个3D位置以应用动作。为了执行动作,智能体移动它的end-effector到这个位置,方向垂直于物体表面。注意,gripper方向(由表面法线确定)可以不同于动作方向
(这个动作方向由方向推理网络确定)。
在接下来的步骤中,智能体选择3D方向并沿着方向移动0.18(m),位置相对于物体表面固定。吸力是吸盘和选定物体位置之间的力约束。end-effector的方向在交互过程中总是与表面法线对齐。
3.2. 位置推理
开始的时候,策略需要选择一个3D位置应用动作。为了找到这个为止,算法需要去从观察图像
中选择一个像素,并应用动作。选择的像素将被使用深度值投影至3D空间中。
这个问题以给图像打标签的方式进行处理,位置网络(如图2a)的输入是RGB-D图像,预测逐像素的position affordance score 。Affordance分数P(w, h)表示在该位置上应用动作时,物体的移动概率。位置网络通过执行动作的输出进行监督。当且仅当物体对象在未来任何步骤中改变时,GT标签为1,使用二分类交叉熵损失训练。
但还需要注意,如果选择了那些接近于axis的位置,无法应用足够的力来移动物体部件。此外,这个标签还受到方向选择的质量影响,若预测了错误的方向,则物体的状态不会发生改变,则会标记为负例。
3.3. 方向推理
给定抓取点的信息,基于这个条件,策略需要选择3D方向
。为了选择动作方向,算法需要采样一组动作候选,评估每个动作候选的效率,“效率”指的是物体关节位置的移动距离
和Arrow-of-Time属性
,如下定义:
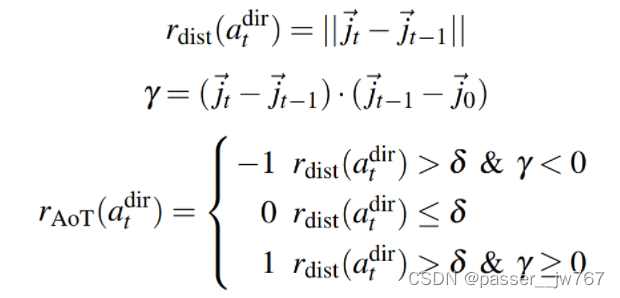
其中,指的是在每一步t时的物体关节状态,δ是确定状态是否发生高效改变的阈值。第一个式子表示该阶段状态和上一阶段状态的差异,第二个式子确定是否
是朝向未来状态的,而不是回到过去的状态。
为生成候选状态,一个简单的方法是在SO(3)空间中均匀采样。受限于采样数量,采样方向只能覆盖不包括最优方向的连续动作空间的一小部分。为解决这个问题引入启发式的方法,迭代交叉熵方法(CEM, Cross-Entropy Method),减轻采样空间以获得高效率方向采样。
这个算法首先在SO(3)空间中均匀采样N个样例。接着基于预测的动作分数评估采样动作:。在下一个迭代过程中,算法重新采样与分数相关的候选:
(∝表示A与B成正比例),=20是一个临时量(我理解因为指数函数是恒大于0的,通过AoT可以筛除掉那些=0或<0的不合理动作方向,从而对那些正确的方向进行重新采样)。添加了随机噪声(添加随机噪声的目的应该是获得与第一次交互存在差异的交互行为),它们被认为是第二次交互的候选。通过这种方法,第二次迭代采样的样本将更多集中在具有“潜力”的区域,使得同样的采样数量下,获得更好的表现。
为了推理动作候选的移动距离,网络需要考虑物体当前状态和抓取位置,二者被编码在当前的观测
中。当前状态的RGB-D图像作为输入,DistNet输出embedding向量
。接着DistDecoder将
和动作a作为输入,输出一个标量作为距离预测
。DistNet是一个卷积神经网络,将输出展开为一个embedding向量。Dist-Decoder是一个全连接神经网络,使用MSE损失
进行训练。
与不同,Arrow-of-Time
的推理基于当前视觉状态和初始视觉状态。在单步交互中,任何动作都会改变物体的状态,使得物体进入一个新的状态。但对于多步交互来说并不是这样的,策略可以移动物体向前向后,而不探索更多新的状态,为了解决这个问题引入了Arrow-of-Time(AoT),用于指示物体究竟是返回了初始状态还是朝向了未来的状态。通过AoT将当前和初始的观察作为输入,输出另外一个embedding向量
。该embedding连接动作embedding来推理最终的AoT标签
。AoT网络结构和Dist的类似,只是输入输出维度有差异。模型使用交叉熵损失训练。
。
3.4. 训练
所有数据来自从头开始的策略训练进行的交互尝试。使用FIFO replay buffer来存储训练数据。为了搜集正例和负例,在一个序列内的方向上应用矛盾的策略用于方向推理(没有特别理解)。在每个序列的前半部分,选择那些具有正AoT的预测进行执行,使物体远离初始状态;在后半部分,执行那些具有负AoT的预测,鼓励物体向回执行。每个epoch搜集16个策略。序列长度一开始是4,在1000 epochs后,每400个epochs增长2,直到到达20为止。
位置模块和方向模块在每个epoch训练8个迭代。对于每一轮位置训练,从replay buffer中采样一个batch(大小=16),其中具有1:1的正负比率。对于方向迭代,一个batch中正、负、不移动数据比率为1:1:1。
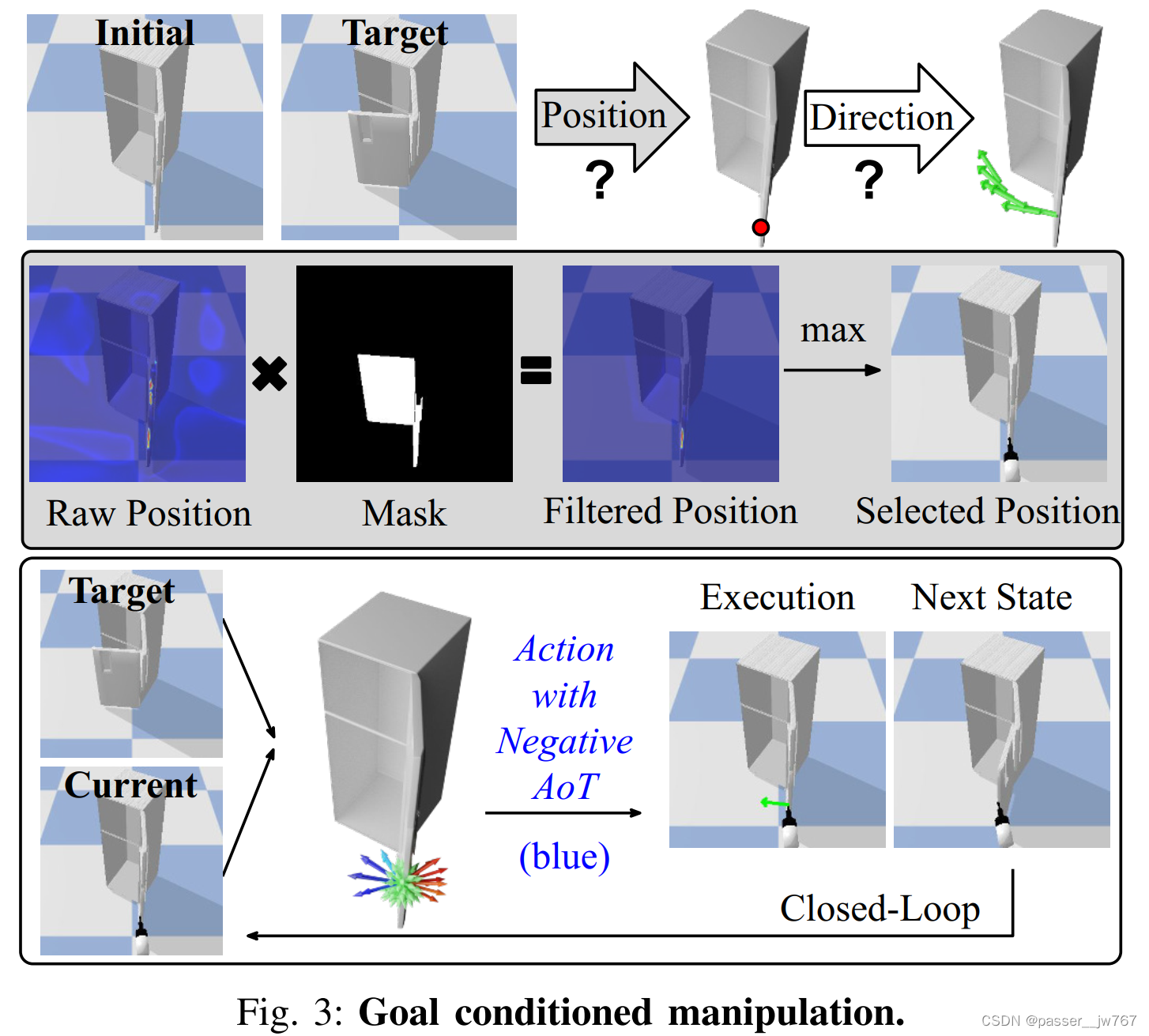
3.5. 使用逆AoT进行的以目标为条件的操纵
大部分操纵任务都是都是基于目标的,这就需要能够生成一些策略,使得这些策略能够在给定随机目标状态的情况下,生成朝向这一目标的动作。(注意,需要给定目标状态)。尽管文章策略是在开-关的探索下进行训练,但学习到的策略仍然可以直接在无需额外训练的情况下,直接应用到基于目标的动作生成上。
核心想法就是交换输入时的初始obs和目标状态obs,然后作为策略生成的输入,通过执行逆AoT的动作,策略尝试去将物体移动回“过去”,从而高效地实现目标。如果AoT所有方向的预测都是非负的,则策略停止。
除了选择正确的动作方向,另一个问题是基于目标的操纵需要选择正确的部件进行操纵,因为有时候物体上可能会有很多个可操纵部件(如冰箱有两个门)
参考文献
【计算机图形学】Universal Manipulation Policy Network for Articulated Objects-CSDN博客
相关文章:
UMPNet: Universal Manipulation Policy Network for Articulated Objects
1. 摘要 UMPNet是一个基于图像的策略网络,能够推理用于操纵铰接物体的闭环动作序列。该策略支持6DoF动作表示和可变长度轨迹。 为处理多种类的物体,该策略从不同的铰接结构中学习,并泛化到未见过的物体或类别上。该策略是以自监督探索的方式…...

高通 Android 12/13冻结屏幕
冻结屏幕很多第一次听到以为是Android一种异常现象,实则不然,就是防止用户在做一些非法操作导致问题防止安全漏洞问题。 1、主要通过用户行为比如禁止下拉状态栏和按键以及onTouch事件拦截等,不知道请看这篇文章(Touch事件传递流…...

C++实现图的存储和遍历
前言 许多新手友友在初学算法和数据结构时,会被图论支配过。我这里整理了一下图论常见的存储和遍历方式,仅供参考。如有问题,欢迎大佬们批评指正。 存储我将提到四种方式:邻接矩阵、vector实现邻接表、数组模拟单链表实现的前向星…...
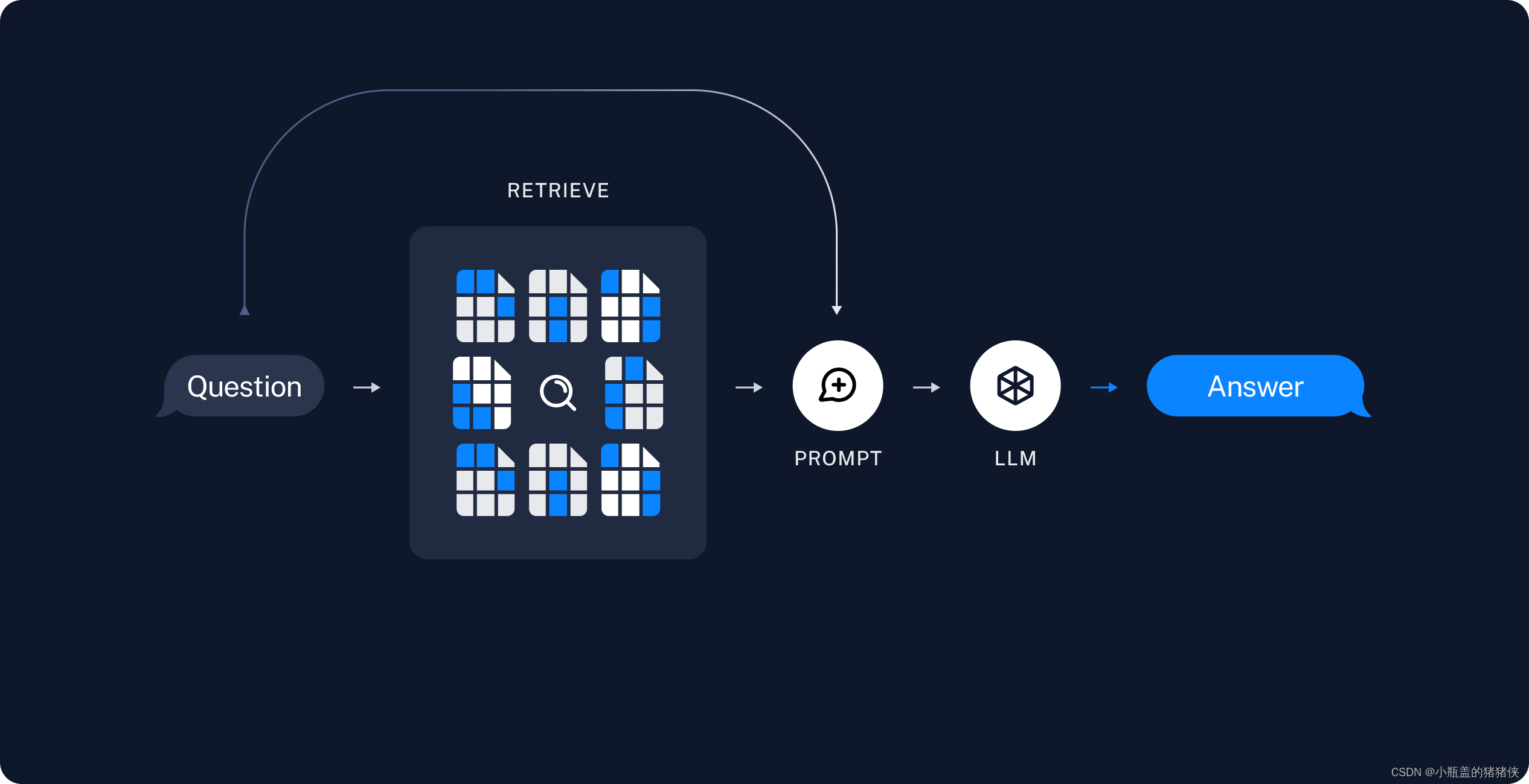
AI--构建检索增强生成 (RAG) 应用程序
LLM 所实现的最强大的应用之一是复杂的问答 (Q&A) 聊天机器人。这些应用程序可以回答有关特定源信息的问题。这些应用程序使用一种称为检索增强生成 (RAG) 的技术。 典型的 RAG 应用程序有两个主要组件 索引:从源中提取数据并对其进行索引的管道。这通常在线下…...
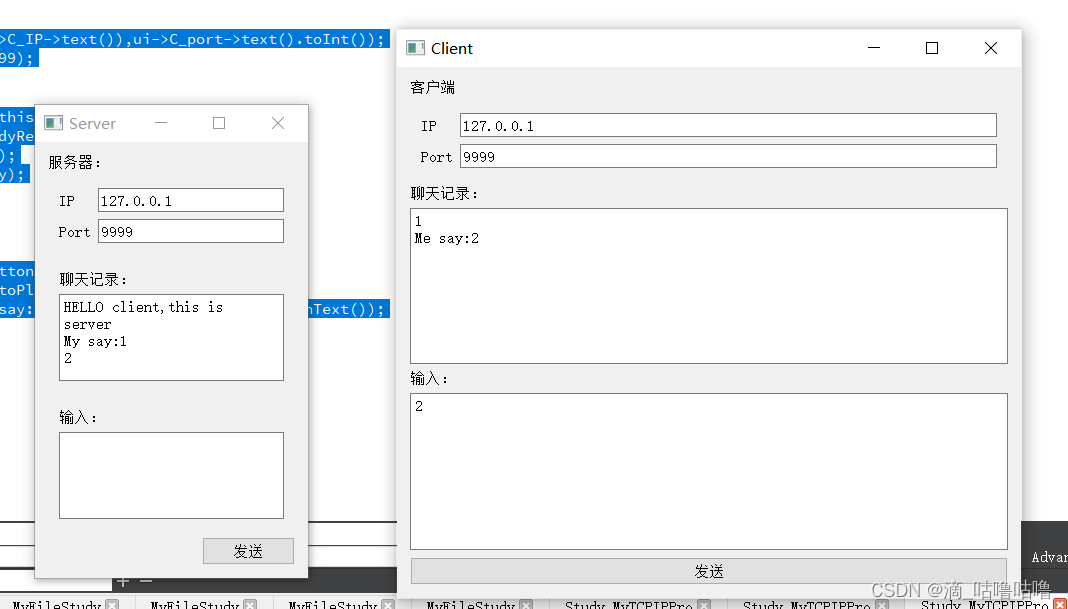
QT7_视频知识点笔记_4_文件操作,Socket通信:TCP/UDP
1.事件分发器,事件过滤器(重要程度:一般) event函数 2.文件操作(QFile) 实现功能:点击按钮,弹出对话框,并且用文件类读取出内容输出显示在控件上。 #include <QFi…...

智慧社区管理系统:打造便捷、安全、和谐的新型社区生态
项目背景 在信息化、智能化浪潮席卷全球的今天,人们对于生活品质的需求日益提升,期待居住环境能与科技深度融合,实现高效、舒适、安全的生活体验。在此背景下,智慧社区管理系统应运而生,旨在借助现代信息技术手段&…...
CustomTkinter:便捷美化Tkinter的UI界面(附模板)
CustomTkinter是一个基于Tkinter的Python用户界面库。 pip3 install customtkinter它提供了各种UI界面常见的小部件。这些小部件可以像正常的Tkinter小部件一样创建和使用,也可以与正常的Tkinter元素一起使用。 它的优势如下: CustomTkinter的小部件和…...
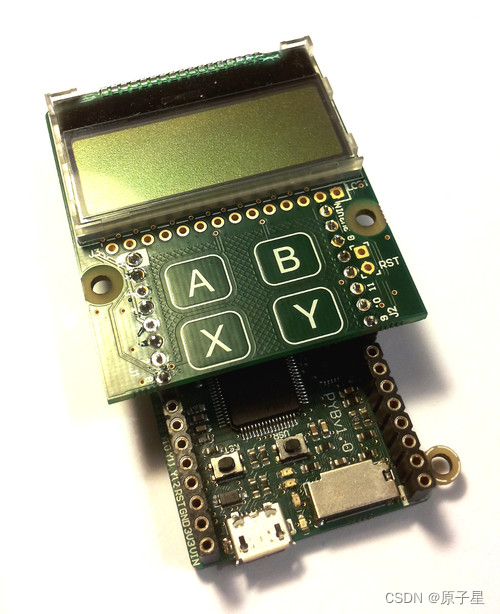
使用MicroPython和pyboard开发板(15):使用LCD和触摸传感器
使用LCD和触摸传感器 pybaord的pyb对LCD设备也进行了封装,可以使用官方的LCD显示屏。将LCD屏连接到开发板,连接后。 使用LCD 先用REPL来做个实验,在MicroPython提示符中输入以下指令。请确保LCD面板连接到pyboard的方式正确。 >>…...

c++20 std::jthread 源码简单赏析与应用
std::jthread 说明: std::jthread 是 C20 中引入的一个新特性,它是线程库中的一个类,专门用于处理 std::thread 与 std::stop_token 和 std::stop_source 之间的交互,以支持更优雅和安全的线程停止机制。 std::stop_source控制…...

自动化测试里的数据驱动和关键字驱动思路的理解
🍅 视频学习:文末有免费的配套视频可观看 🍅 点击文末小卡片,免费获取软件测试全套资料,资料在手,涨薪更快 初次接触自动化测试时,对数据驱动和关键字驱动不甚理解,觉得有点故弄玄须…...

【30天精通Prometheus:一站式监控实战指南】第6天:mysqld_exporter从入门到实战:安装、配置详解与生产环境搭建指南,超详细
亲爱的读者们👋 欢迎加入【30天精通Prometheus】专栏!📚 在这里,我们将探索Prometheus的强大功能,并将其应用于实际监控中。这个专栏都将为你提供宝贵的实战经验。🚀 Prometheus是云原生和DevOps的…...
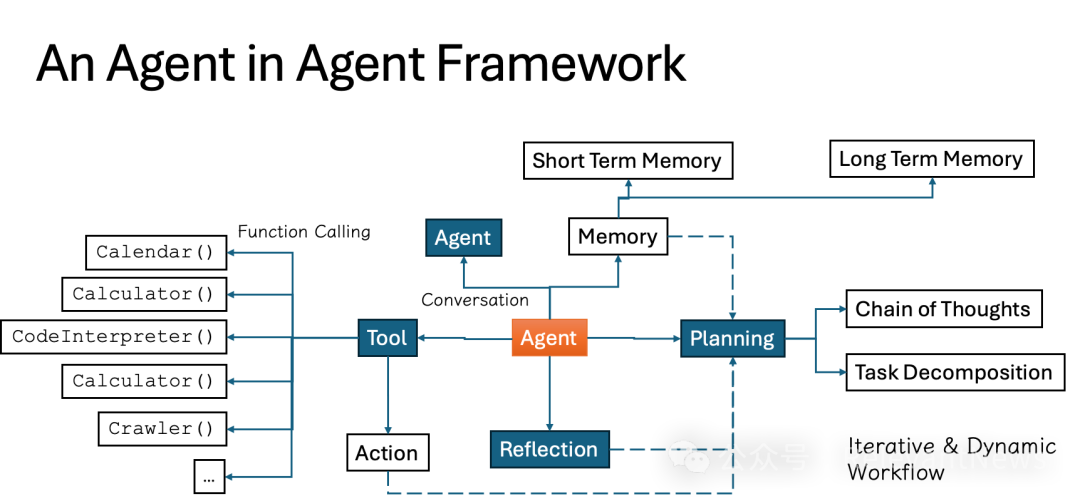
浅析智能体开发(第二部分):智能体设计模式和软件架构
大语言模型(LLM)驱动的智能体(AI Agent)展现出许多传统软件所不具备的特征。不仅与传统软件的设计理念、方法、工具和技术栈有显著的差异,AI原生(AI Native)的智能体还融入了多种新概念和技术。…...
Unity学习笔记---Transform组件
组件介绍 Transform组件在每个游戏对象中都存在,且只存在一个。该组件保存了游戏对象的位置、平移、旋转、缩放等信息。 组件相关方法 //获取当前游戏对象的Transform组件this.transform; getObject.transform; GetComponent<Transform>();//属性 gameObje…...
springboot+jsp校园理发店美容美发店信息管理系统0h29g
前台管理:会员管理、会员预定、开单点单、收银结帐、技师提成 后台管理:数据维护、物料管理、数据查询、报表分析、系统设置等 灵活的付款方式,支持现金、挂帐、会员卡,同时支持多种折扣方式并可按用户要求设置多种结帐类型善的充值卡管理模块:支持优惠卡…...
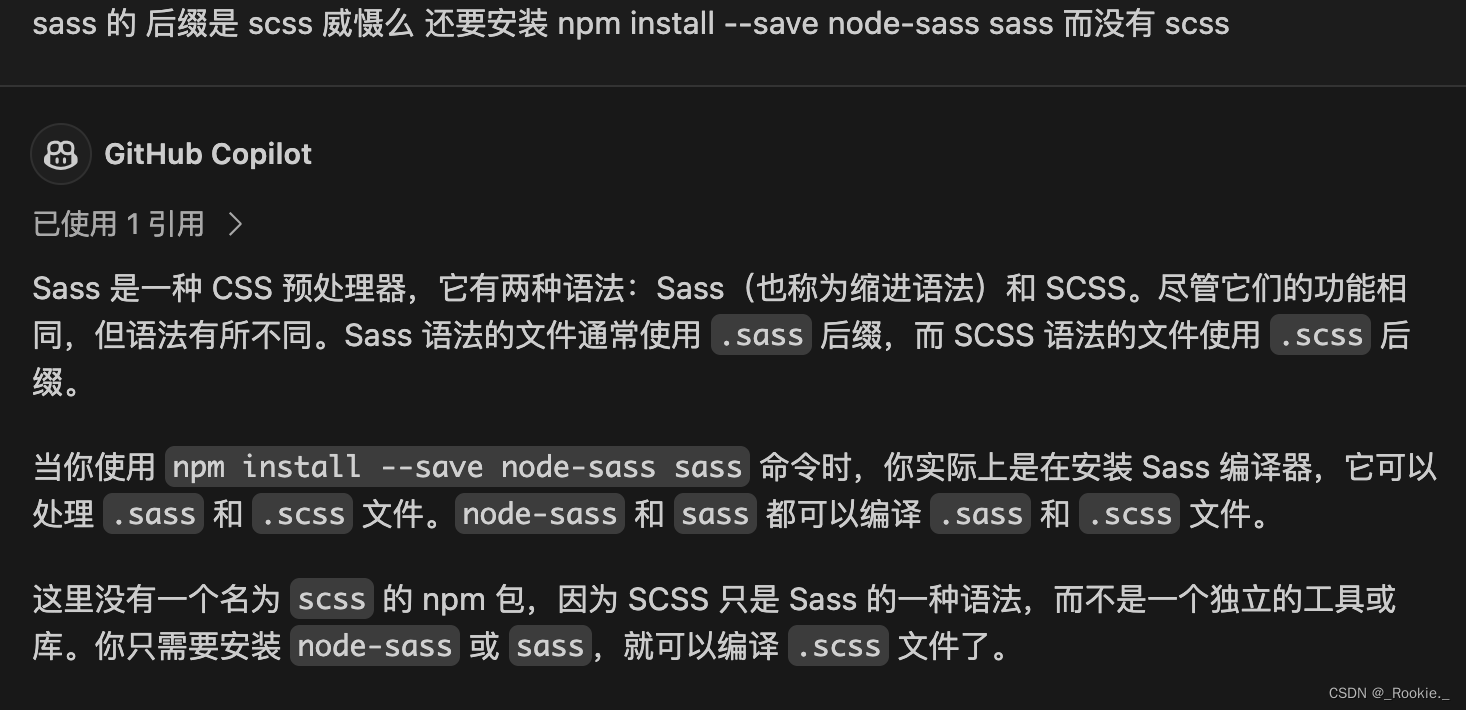
css - sass or scss ?
总的来说,Sass 和 SCSS 提供的功能是一样的,选择哪种语法主要取决于你的个人或团队的偏好。...
html5 笔记01
01 表单类型和属性 input的type属性 单行文本框: typetext 电子邮箱 : typeemail 地址路径 : type url 定义用于输入数字的字段: typenumber 手机号码: typetel 搜索框 : typesearch 定义颜色选择器 : typecolor 滑块控件 : typerange 定义日期 :typedate 定义输入时间的控件…...

E5063A是德科技e5063a网络分析仪
181-2461-8938产品概述: 简 述: E5063A 是低成本网络分析仪,可提供优化的性能和功能,适用于测试简单的无源器件,例如天线、电缆、滤波器和 PCB 等。它利用工业标准 ENA 系列始终如一的测量架构,能够极…...
)
【星海随笔】微信小程序(二)
WXML 模板语法 - 数据绑定 在data中定义页面的数据 在页面对应的 .js 文件中,把数据定义到 data 对象中即可: Page({data: {// 字符串类型的数据info: init data,// 数据类型的数据msgList: [{msg: hello},{msg: world}]} })Mustache 语法的格式 把 …...
Python采集安居客租房信息
Python采集安居客租房信息 一、需求介绍二、完整代码一、需求介绍 本次采集的需求就是获取到页面中的所有信息: 将数据采集好之后保存为如下csv文件: 爬取的流程不再展开分析,完整代码附后。 二、完整代码 import csvimport requests from lxml import etreeclass Anju…...
Rust构造JSON和解析JSON
目录 一、Rust构造JSON和解析JSON 二、知识点 serde_json JSON 一、Rust构造JSON和解析JSON 添加依赖项 cargo add serde-json 代码: use serde_json::{Result, Value};fn main() -> Result<()>{//构造json结构 cpu_loadlet data r#"{"…...
 ;CLQTRLELYKQGLRGSLTKLKGPLT)
GM-CSF (54-78) ;CLQTRLELYKQGLRGSLTKLKGPLT
一、基础信息中文名称:粒细胞 - 巨噬细胞集落刺激因子片段 (54-78)英文名称:Granulocyte-Macrophage Colony-Stimulating Factor (54-78)三字母序列:Cys-Leu-Gln-Thr-Arg-Leu-Glu-Leu-Tyr-Lys-Gln-Gly-Leu-Arg-Gly-Ser-Leu-Thr-Lys-Leu-Lys-G…...

基于国产可控硅LTH16-08的电风扇无极调速方案设计与实践
1. 项目概述:当可控硅遇上电风扇 最近在帮一个做小家电的朋友优化一款电风扇的电路板,核心需求是想实现一个无极调速功能,让风扇的风量可以从微风到强风平滑过渡,而不是传统的三档或五档机械开关。这个需求听起来简单,…...

ESP32外部中断防抖实战:用MicroPython搞定按键误触,附完整消抖代码
ESP32外部中断防抖实战:用MicroPython搞定按键误触,附完整消抖代码 当你按下ESP32开发板上的按键时,是否遇到过LED灯莫名其妙闪烁多次?或者智能家居设备偶尔会误触发某个功能?这些"灵异事件"的罪魁祸首&…...

Cobalt Strike 完整安装指南,含网盘资源与Java配置
Cobalt Strike安装教程 说明: 本教程仅用于学习与研究,请勿用于非法用途。 kali安装java环境参考(如有侵权联系删除) https://blog.csdn.net/weixin_54499207/article/details/144985879?sharetypeblog&shareId144985879&…...

游戏AI战略逻辑:状态建模、奖励设计与实时决策三要素
1. 项目概述:当机器开始玩我们的游戏,背后不是炫技,而是逻辑的具象化“当机器开始玩我们的游戏”——这句话乍听像科幻片开场白,但现实中它早已不是新闻。AlphaGo击败李世石那盘棋之后,很多人以为AI下棋只是算法碾压人…...

AUTOSAR OS任务机制解析:从实时调度原理到RTA-OS工程实践
1. 项目概述:为什么AUTOSAR OS的Task是嵌入式软件的核心骨架?在汽车电子领域,如果你正在开发基于AUTOSAR架构的ECU软件,那么RTA-OS(Real-Time Application Operating System)中的Task(任务&…...

仅剩最后47个印尼语专属Voice ID配额!ElevenLabs企业版印尼语音定制通道即将关闭——附2024Q3合规接入白皮书
更多请点击: https://codechina.net 第一章:印尼语Voice ID配额告急与企业定制通道关闭预警 近期,多家使用印尼语(Bahasa Indonesia)语音身份验证(Voice ID)服务的企业客户收到平台侧自动通知&…...

你的仿真传感器数据准吗?Gazebo中激光雷达与深度相机的噪声模型配置与Rviz可视化调参实战
高保真机器人仿真:Gazebo传感器噪声模型与Rviz可视化调参全指南 在机器人算法开发中,仿真环境的真实性直接决定了算法测试的有效性。许多SLAM和导航算法在仿真环境中表现优异,一旦部署到真实机器人上却出现各种问题,这往往源于仿真…...

保姆级教程:用UltraISO给U盘刻录Ubuntu 22.04启动盘,一次成功不踩坑
零基础实战:用UltraISO打造Ubuntu 22.04启动盘的终极指南 第一次接触Linux系统安装的新手,往往会在制作启动盘这一步遇到各种意想不到的问题。U盘明明已经刻录完成,却在启动时出现黑屏、报错甚至根本无法识别——这些困扰过无数初学者的坑&am…...

免费图片去水印工具在线网站有哪些?2026年图片水印去除APP和软件推荐
在日常工作和生活中,我们经常会遇到需要去除图片水印的情况。无论是为了社交媒体分享、内容创作还是素材整理,找到一款高效的免费去水印工具都能节省不少时间。本文将为你详细介绍2026年最实用的免费图片去水印工具,包括在线网站、手机APP和电…...