ROS2学习——节点话题通信(2)
目录
一、ROS2节点
1.概念
2.实例
(1)ros2 run
(2)ros2 node list
(3)remapping重映射
(4)ros2 node info
二、话题
(1) ros2 topic list
(2) ros2 topic echo
(3) ros2 topic info
(4)ros2 inerface show
(5) ros2 topic pub
(6)ros2 topic hz
三、服务
(1) ros2 service list
(2)ros2 services type
(3)ros2 service find
(4)ros2 service call
一、ROS2节点
1.概念
在ROS2中,每个节点都负责单一模块,不比如轮子的电机或者是传感器的数据等。每个节点都可以接受和发送信息,这些信息通过话题,服务,动作或者是参数服务器进行传递。
所有的机器人系统都由许都节点组成。在ROS2中每个可执行文件(C++程序或者python文件)可以保护多个或者单个节点。
2.实例
(1)ros2 run
ros2 run <package_name> <executable_name>比如我们打开小海龟的功能包:
ros2 run turtlesim turtlesim_node其中turtlesim为功能包名称,可执行程序的名称为turtlesim_node。
(2)ros2 node list
如果我需要查询目前运动的节点,可以直接使用该语句进行查找。
在终端中则会显示:
![]()
(3)remapping重映射
节点重映射运行修改节点原始的属性(名字,话题名,服务属性等)
这里我们测试修改turtle_teleop_key 的属性。
ros2 run turtlesim turtlesim_node --ros-args --remap __node:=my_turtle这里将节点名称修改为了:
/my_turtle
可以使用ros2 node list进行查看。
(4)ros2 node info
将刚刚重映射的话题,查看节点信息:
ros2 node info /my_turtle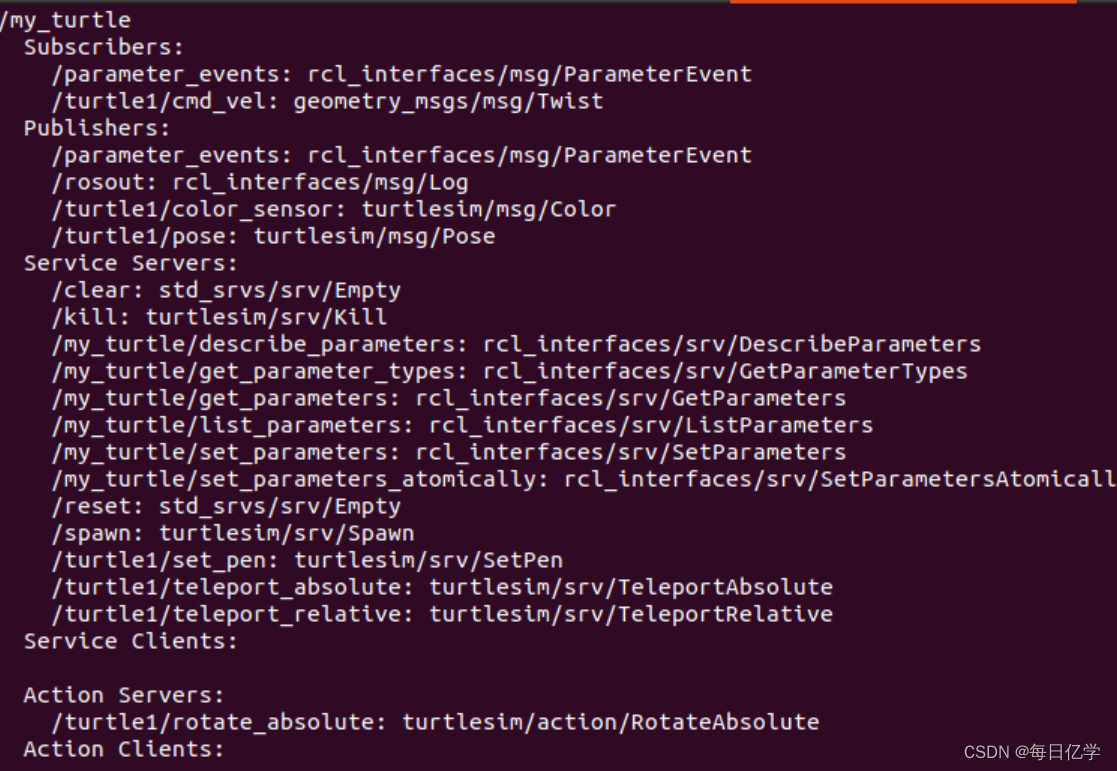
有兴趣的读者可以查看一下原始节点的信息发现那里做出了更改。
二、话题
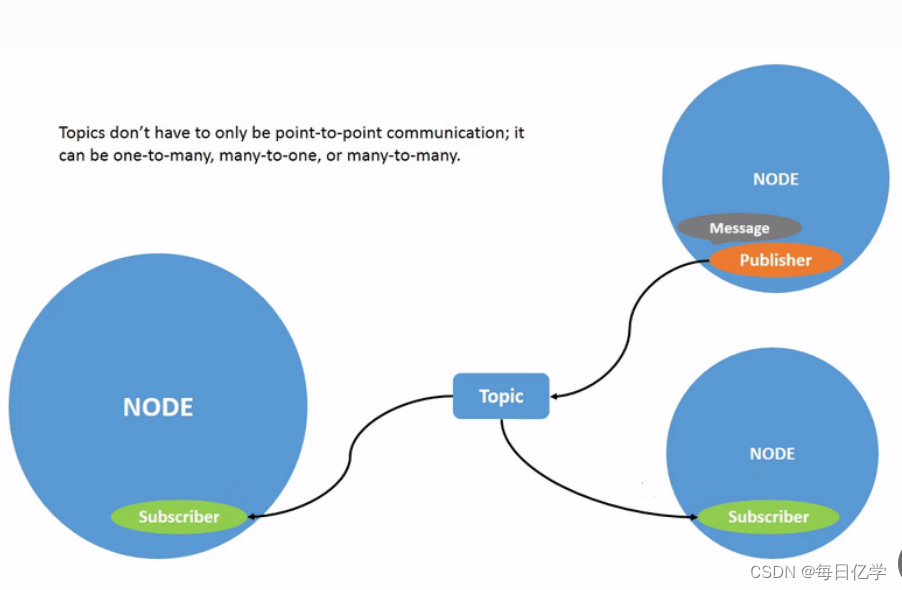
ROS2将复杂的系统分解为多个模块的节点,话题则是充当节点之间信息交换的总线。
节点可以将数据发布到任意数量的话题,并同时订阅任意数量的话题。
使用rqt_graph我们可以清晰的看见节点和话题之间的关系。
打开小海龟和控制小海龟键盘的节点:
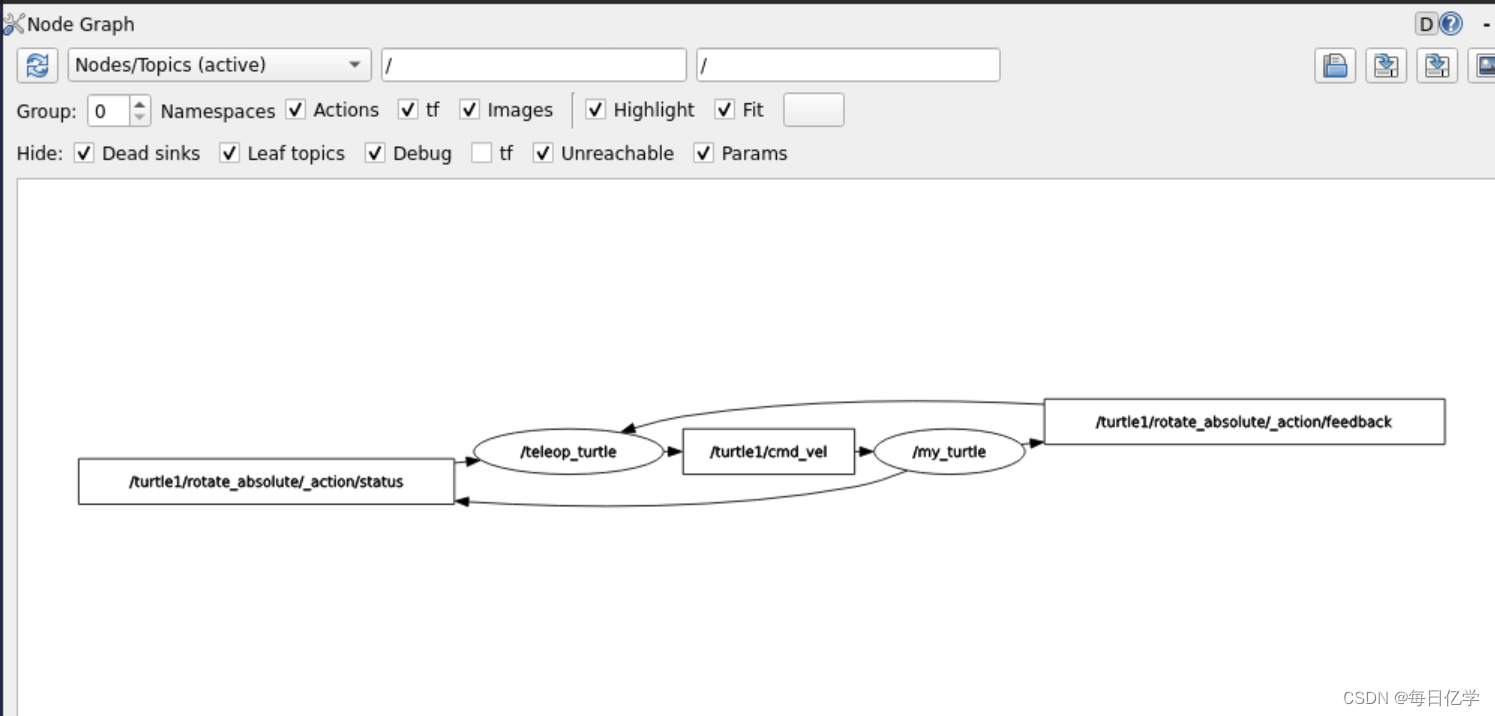
/teleop_turtle节点发布数据给/turtle1/cmd_vel话题,这个话题将数据传递给/my_turtle节点。对于一个比较复杂的系统可以使用rqt很方便的看清楚程序内部话题节点信息接收关系。
(1) ros2 topic list
该语句可现实当前的话题,如果在指令的后面带上-t选项则可以显示出话题的类型

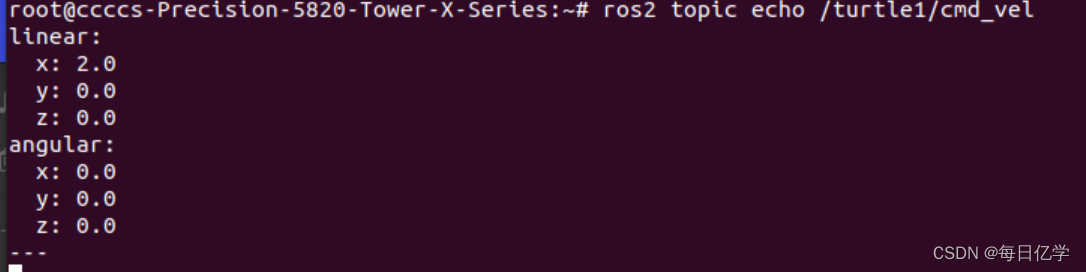
(2) ros2 topic echo
如果已知话题的名字,可以使用该语句输出话题的信息在终端当中。
ros2 topic echo <topic_name>ros2 topic echo /turtle1/cmd_vel如果此时你移动键盘方向键:
(3) ros2 topic info
ros2 topic info /turtle1/cmd_vel这个语句和node info类似,终端会输出话题的类型发送和接受者的相关信息。
(4)ros2 inerface show
如果我们需要查询一个话题使用的类型是有那些信息可以使用该语句,话题的类型可以通过
ros2 topic list -t
ros2 interface show geometry_msgs/msg/Twist(5) ros2 topic pub
同时我们也可以在终端中发布和修改话题,该语句的使用格式:
ros2 topic pub <topic_name> <msg_type> '<args>'我们需呀知道话题的名称,话题发布信息的类型,args则是按照话题的类型输入的信息(ROS2中规定要以yaml的格式进行输入)。
比如我希望小海龟x轴移动2,z轴旋转1.8弧度。
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"这里--once表示发布出这个信息后就退出。

可以看见小海龟转动了1/4圈,当然如果你希望它一直旋转则可以设置发布的频率:
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"这里需要去除--once选项,并且加上--rate 1表示这个话题以1HZ的形式进行发布,这样我们可以看见小海龟一直在花圈运动。

当然最后你也可以去rqt_graph中查看话题和节点的变换。
(6)ros2 topic hz
改语句在终端中输出需要查询话题的频率。
ros2 topic hz /turtle1/pose三、服务
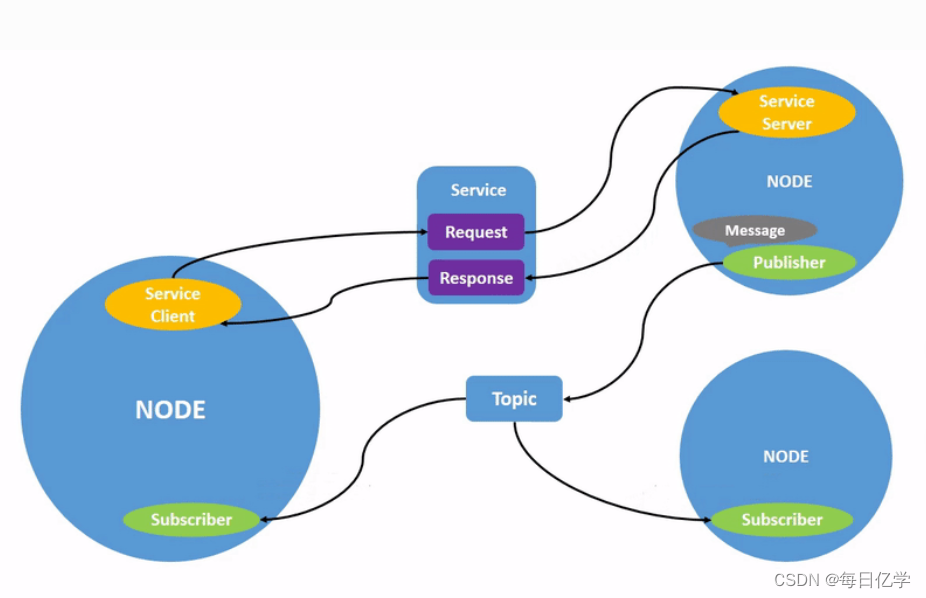
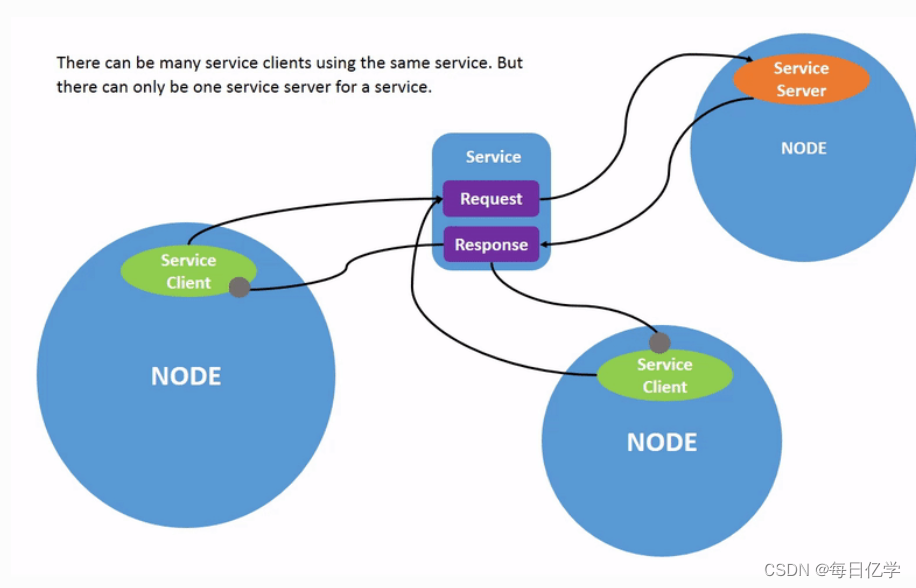
服务通信是是ROS中的另一种通信方式。这种方式不同于发布于订阅的方式,服务通讯可以理解为呼叫和响应的模型。多个节点使用同一个服务通信,只能是一个进行。
(1) ros2 service list
运行该语句会再终端中输出目前运行的服务通信:
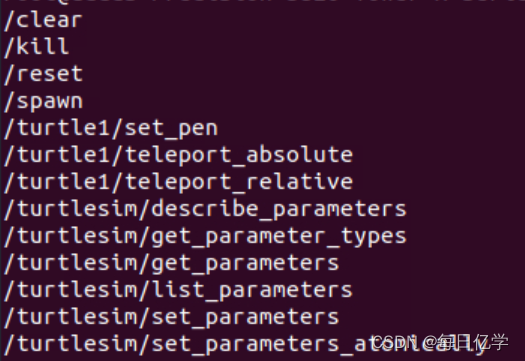
可以看出一个节点中带有6个参数的名字,在ROS2中几乎大部分的服务都是这样的结构。
同样的如果在最后加上-t 则可以显示出服务的类型。
(2)ros2 services type
该语句的作用是查看服务的类型。服务的类型类似于话题。服务有两个部分组成:
信息的请求+响应
ros2 service type <service_name>
ros2 service type /clearEmpty类型表示的是这个服务没有发送任何请求和响应。

(3)ros2 service find
如果你知道服务使用的类型,想找到服务的名字则可以使用:
ros2 service find std_srvs/srv/Empty(4)ros2 service call
如果你知道服务的名字和类型,则可以调用这个服务:
#ros2 service call <service_name> <service_type> <arguments>
ros2 service call /clear std_srvs/srv/Empty如果你打开了小海龟的节点,并且使用键盘控制运行了一段轨迹。启动这个服务会发现小海龟走的路径都被清除了。
同时我们可以再对/spawn进行操作
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"我们再次调用/spawn这个服务,并且在小海龟串口中再生成一只,同时指定了小海龟的位姿。

服务的小总结:
对比话题:话题可以一对多,一个发布者多个订阅者。服务式一种请求/响应模式,客户端提出请求,服务段生成响应。是只能单独进行的。
未完待更新...
相关文章:
ROS2学习——节点话题通信(2)
目录 一、ROS2节点 1.概念 2.实例 (1)ros2 run (2)ros2 node list (3)remapping重映射 (4)ros2 node info 二、话题 (1) ros2 topic list …...
【Spring Boot】深度复盘在开发搜索引擎项目中重难点的整理,以及遇到的困难和总结
💓 博客主页:从零开始的-CodeNinja之路 ⏩ 收录文章:【Spring Boot】深度复盘在开发搜索引擎项目中重难点的整理,以及遇到的困难和总结 🎉欢迎大家点赞👍评论📝收藏⭐文章 目录 什么是搜索引…...

配置docker阿里云镜像地址
一、安装docker的步骤: 1.yum install -y yum-utils 2.yum-config-manager --add-repo http://mirrors.aliyun.com/docker- ce/linux/centos/docker-ce.repo --配置阿里云仓库3.yum makecache fast4.yum install docker-ce -y5.docker version …...

ICML 2024 Mamba 论文总结
2024ICML(International Conference on Machine Learning,国际机器学习会议)在2024年7月21日-27日在奥地利维也纳举行 🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀 欢迎大家关注时空探索之旅 …...

Sass详解
Sass简介 Sass(Syntactically Awesome Stylesheets)是一种CSS预处理器,它在CSS的语法基础上添加了一些功能和语法糖,提供了更强大和灵活的样式表语言。 Sass可以通过定义变量、嵌套规则、混合、继承等功能,帮助开发者…...

如何实现一个高效的排序算法?
要实现一个高效的排序算法,可以考虑以下几个方面: 1.选择合适的排序算法:根据数据规模和特点选择合适的排序算法。例如,对于小规模的数据可以选择插入排序或选择排序,而对于大规模数据可以选择归并排序或快速排序。 …...
Linux--10---安装JDK、MySQL
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 安装JDK[Linux命令--03----JDK .Nginx. 数据库](https://blog.csdn.net/weixin_48052161/article/details/108997148) 第一步 查询系统中自带的JDK第二步 卸载系统中…...
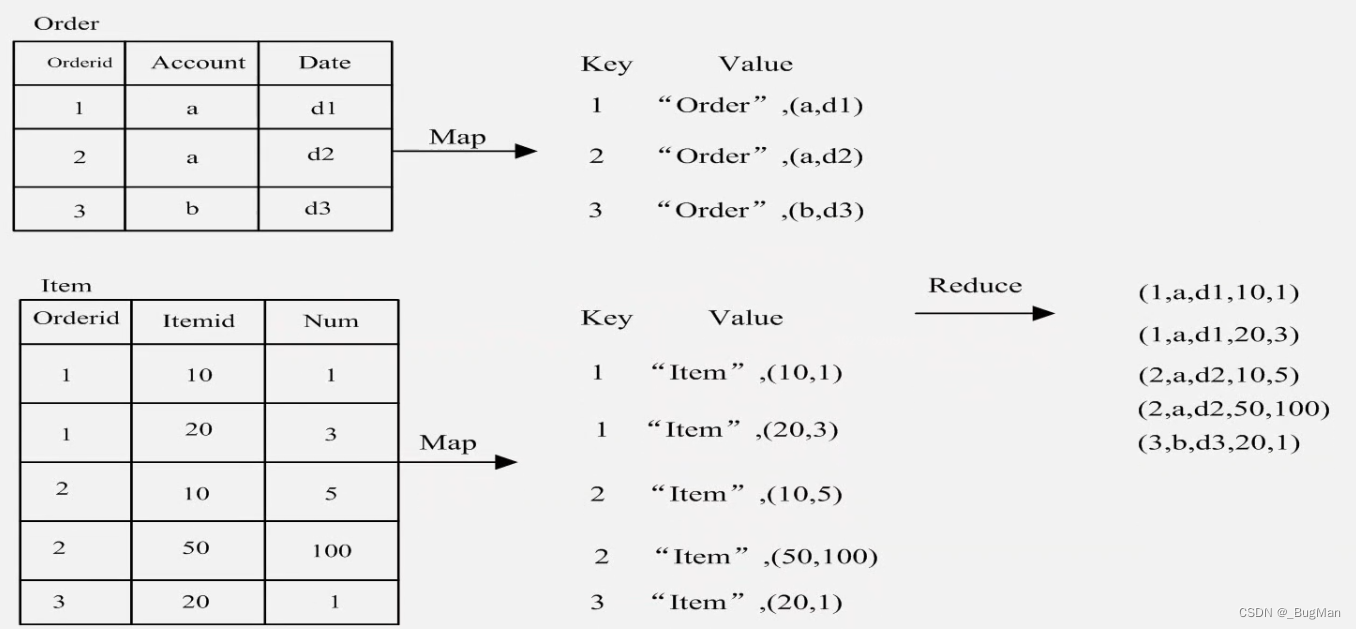
【大数据】MapReduce JAVA API编程实践及适用场景介绍
目录 1.前言 2.mapreduce编程示例 3.MapReduce适用场景 1.前言 本文是作者大数据系列专栏的其中一篇,前文我们依次聊了大数据的概论、分布式文件系统、分布式数据库、以及计算引擎mapreduce核心概念以及工作原理。 书接上文,本文将会继续聊一下mapr…...
)
图像分类和文本分类(传统机器学习和深度学习)
1. 传统机器学习—决策树 1.1 图像分类代码 from sklearn import tree from sklearn.datasets import load_iris from sklearn.model_selection import train_test_split# 加载数据集 iris load_iris() X, y iris.data, iris.target# 划分数据集 X_train, X_test, y_train,…...
基于SpringBoot和Hutool工具包实现的验证码案例
目录 验证码案例 1. 需求 2. 准备工作 3. 约定前后端交互接口 需求分析 接口定义 4. Hutool 工具介绍 5. 实现验证码 后端代码 前端代码 6. 运行测试 验证码案例 随着安全性的要求越来越高,目前项目中很多都会使用验证码,只要涉及到登录&…...

python-找出四位数中的玫瑰花数
【问题描述】玫瑰花数指一个n位数(n>4),其每位上的数字的n次幂之和等于本身。 请求出所有四位数中的玫瑰花数 【输入形式】 【输出形式】 【样例输入】 【样例输出】1634 8208 9474 【样例说明】 【评分标准】 完整代码如下: for n in ra…...
Linux-命令上
at是一次性的任务,crond是循环的定时任务 如果 cron.allow 文件存在,只有在文件中出现其登录名称的用户可以使用 crontab 命令。root 用户的登录名必须出现在 cron.allow 文件中,如果这个文件存在的话。系统管理员可以明确的停止一个用户&am…...
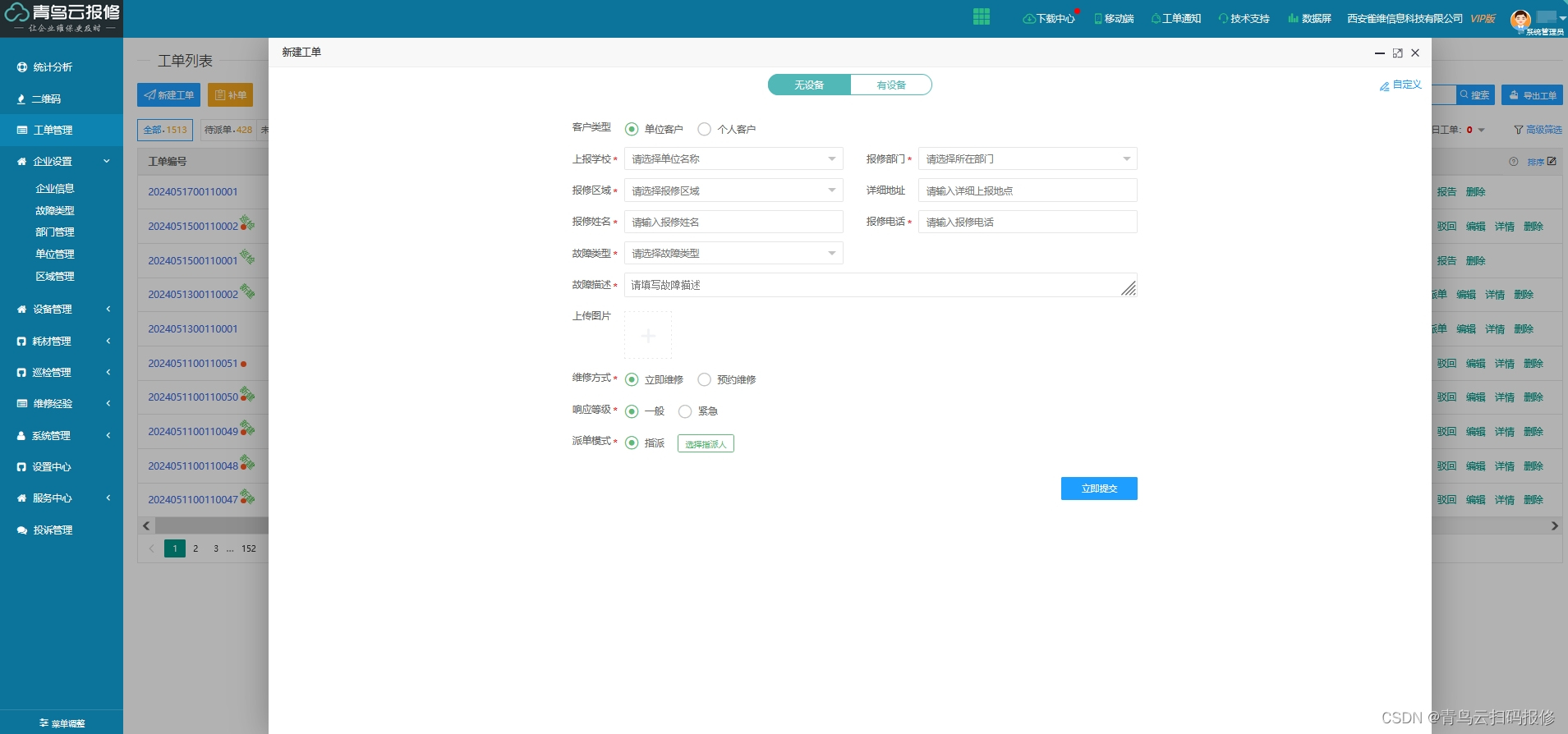
青鸟云报修系统:实现高效、便捷的维修申请处理
在日常生活和工作中,故障报修难免会遇到,售后报修服务则成为了解决问题的关键。纸质化售后报修维修申请单,作为报修流程中的重要一环,在一定程度上能够记录和追踪售后报修维修流程,但在实际操作过程中却存在着诸多弊端…...

Python解析网页
目录 1、Beautiful Soup 2、解析数据 3、遍历文档树 4、搜索文档树 一、Beautiful Soup 1、什么是Beautiful Soup 定义:Beautiful Soup 是一个可以从HTML或XML文件中提取数据的Python库. 功能:它能够通过你喜欢的转换器实现惯用的文档导航,查找,修…...

IDEA连接MySQL后如何管理数据库
上一节讲解了IDEA如何连接MySQL数据库管理系统,接下来我们就可以在IDEA里使用MySQL来管理数据库了。那么如果我们现在还没有创建需要的数据库怎么办?本节就来教大家如何在IDEA连接MySQL后管理数据库(创建/修改/删除数据库、创建/修改/删除表、插入/更新/…...

linux新机快速配置ssh
配置SSH以实现证书登录 要配置新的Linux机器以实现证书登录,您需要执行以下步骤: 安装SSH服务器: sudo apt-get install openssh-server修改SSH端口(可选): SSH配置文件(通常位于/etc/ssh/sshd…...
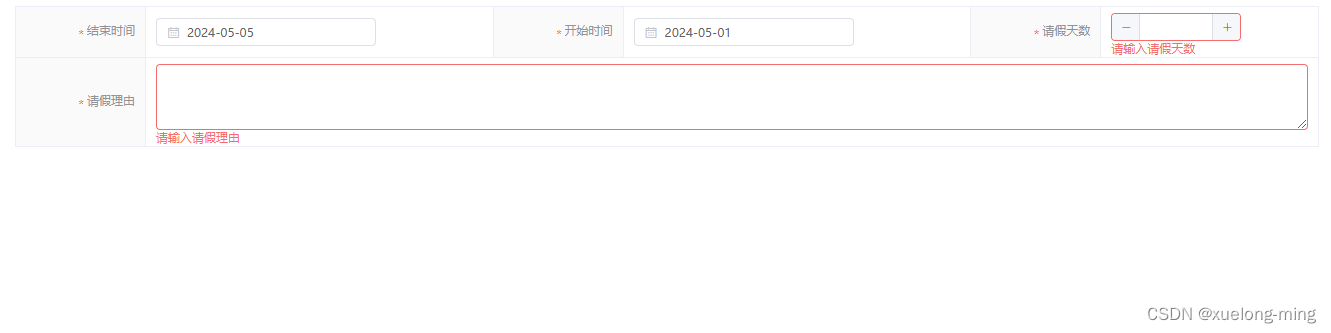
使用elementUI的form表单校验时,错误提示位置异常解决方法
问题 最近在做项目时遇到一个问题,使用elementUI的Descriptions 描述列表与form表单校验时,遇到校验信息显示的位置不对,效果如图: 期望显示在表格中。 效果 代码 html <el-form :model"form":rules"rules…...

Android面试题之Kotlin常见集合操作技巧
本文首发于公众号“AntDream”,欢迎微信搜索“AntDream”或扫描文章底部二维码关注,和我一起每天进步一点点 list 创建和修改 不可变list,listOf var list listOf("a","d","f") println(list.getOrElse(3){"Unkn…...
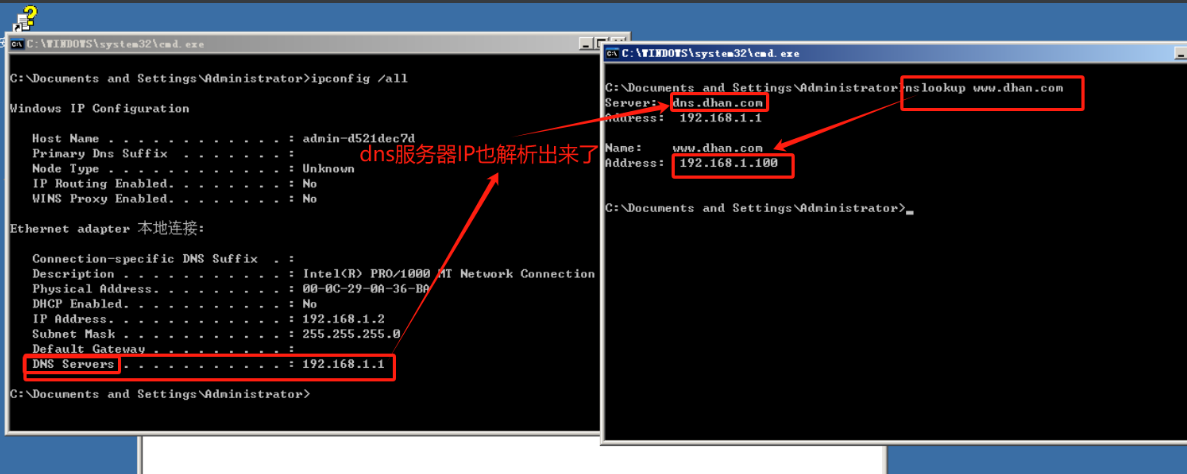
网络拓扑—DNS服务搭建
文章目录 DNS服务搭建网络拓扑配置网络DNSPC 安装DNS服务配置DNS服务创建正向查找区域创建反向查找区域创建子域名 PC机DNS域名解析 DNS服务搭建 网络拓扑 为了节省我的U盘空间,没有用路由器,所以搭建的环境只要在同网段即可。 //交换机不用考虑 DNS&a…...
Mybatis-Plus笔记
1.MP基础 1.1 MP常见注解 TableName(“指定表明”) TableName("tb_user") // 指定表名 Data NoArgsConstructor AllArgsConstructor Builder public class User {private Long id;private String userName;private String password;private String name;private I…...

为什么92%的Sora 2初学者卡在第4步?——帧一致性崩塌诊断工具包+时间轴锚点校准法
更多请点击: https://kaifayun.com 第一章:Sora 2视频生成的核心原理与环境准备 Sora 2并非OpenAI官方发布的模型,而是社区基于Sora技术理念构建的开源复现与增强框架,其核心依托于时空联合建模的扩散变换器(Spacetim…...

Taotoken的TokenPlan套餐如何实现更经济的模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的TokenPlan套餐如何实现更经济的模型调用 1. 理解TokenPlan的计费模式 在模型应用开发过程中,成本的可预测性…...
)
从STM32迁移到普冉PY32F003:UART代码移植保姆级教程(附HAL库对比)
从STM32到普冉PY32F003的UART代码迁移实战指南 1. 国产MCU替代浪潮下的技术选择 近年来,半导体行业的供应链波动促使更多工程师将目光投向国产MCU解决方案。普冉PY32F003系列作为Cortex-M0内核的代表产品,以48MHz主频、64KB Flash和8KB RAM的配置&#x…...

为什么92%的团队用DeepSeek生成方案仍需人工重写?揭秘缺失的2个元认知层与1套校验协议
更多请点击: https://intelliparadigm.com 第一章:为什么92%的团队用DeepSeek生成方案仍需人工重写?揭秘缺失的2个元认知层与1套校验协议 当团队将DeepSeek-R1或DeepSeek-VL模型用于技术方案生成时,表面看响应迅速、逻辑连贯&…...

碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理
碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧蓝…...

告别Windows卡顿!在VMware里给Kubuntu 22.04 LTS分区和安装的保姆级避坑指南
告别Windows卡顿!在VMware里给Kubuntu 22.04 LTS分区和安装的保姆级避坑指南你是否已经厌倦了Windows系统越来越慢的启动速度、频繁的后台更新和资源占用?当你的电脑开始频繁卡顿,或许该考虑给系统来一次"减负"了。Kubuntu 22.04 L…...

终极Obsidian笔记模板指南:如何用kepano-obsidian构建你的第二大脑
终极Obsidian笔记模板指南:如何用kepano-obsidian构建你的第二大脑 【免费下载链接】kepano-obsidian My personal Obsidian vault template. A bottom-up approach to note-taking and organizing things I am interested in. 项目地址: https://gitcode.com/gh_…...
)
仅限首批200位架构师获取:DeepSeek-DDD联合建模工作坊实录(含领域事件风暴原始会议录像+决策日志)
更多请点击: https://kaifayun.com 第一章:DeepSeek领域驱动设计的范式演进与本质洞察 DeepSeek作为面向大规模智能体协同与复杂业务语义建模的新一代AI原生架构,其领域驱动设计(DDD)实践已突破传统分层单体范式&…...

终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧
终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

Noto字体:全球文字系统统一渲染的技术架构与实践指南
Noto字体:全球文字系统统一渲染的技术架构与实践指南 【免费下载链接】noto-fonts Noto fonts, except for CJK and emoji 项目地址: https://gitcode.com/gh_mirrors/no/noto-fonts 技术价值摘要 字符集完整性保障:Noto字体实现了对Unicode 6.…...