【Python】WHEELTEC GPS G60主代码读取传感器数据代码(Windows系统)
【Python】WHEELTEC惯导IMU主代码读取传感器数据代码
Windows系统,直接输入串口号即可
读取设备的移动速度(km/h)
注:该GPS传感器需要在室外条件运行,室内可能接收不到信号。
# coding: utf-8
# last modified:20231031
import time
import serial
import reutctime = ''
lat = ''
ulat = ''
lon = ''
ulon = ''
numSv = ''
msl = ''
cogt = ''
cogm = ''
sog = ''
kph = ''
gps_t = 0#ser = serial.Serial("/dev/wheeltec_gps", 9600)
ser = serial.Serial("COM4", 9600)#Windows系统直接输入串口号即可if ser.isOpen():print("GPS Serial Opened! Baudrate=9600")
else:print("GPS Serial Open Failed!")def Convert_to_degrees(in_data1, in_data2):len_data1 = len(in_data1)str_data2 = "%05d" % int(in_data2)temp_data = int(in_data1)symbol = 1if temp_data < 0:symbol = -1degree = int(temp_data / 100.0)str_decimal = str(in_data1[len_data1-2]) + str(in_data1[len_data1-1]) + str(str_data2)f_degree = int(str_decimal)/60.0/100000.0# print("f_degree:", f_degree)if symbol > 0:result = degree + f_degreeelse:result = degree - f_degreereturn resultdef GPS_read():global utctimeglobal latglobal ulatglobal longlobal ulonglobal numSvglobal mslglobal cogtglobal cogmglobal sogglobal kphglobal gps_tif ser.inWaiting():if ser.read(1) == b'G':time.sleep(.05) if ser.inWaiting():if ser.read(1) == b'N':if ser.inWaiting():choice = ser.read(1)if choice == b'G':if ser.inWaiting():if ser.read(1) == b'G':if ser.inWaiting():if ser.read(1) == b'A':#utctime = ser.read(7)GGA = ser.read(70)GGA_g = re.findall(r"\w+(?=,)|(?<=,)\w+", str(GGA))# print(GGA_g)if len(GGA_g) < 13:print("GPS no found")gps_t = 0return 0else:utctime = GGA_g[0]# lat = GGA_g[2][0]+GGA_g[2][1]+'°'+GGA_g[2][2]+GGA_g[2][3]+'.'+GGA_g[3]+'\''lat = "%.8f" % Convert_to_degrees(str(GGA_g[2]), str(GGA_g[3]))ulat = GGA_g[4]# lon = GGA_g[5][0]+GGA_g[5][1]+GGA_g[5][2]+'°'+GGA_g[5][3]+GGA_g[5][4]+'.'+GGA_g[6]+'\''lon = "%.8f" % Convert_to_degrees(str(GGA_g[5]), str(GGA_g[6]))ulon = GGA_g[7]numSv = GGA_g[9]msl = GGA_g[12]+'.'+GGA_g[13]+GGA_g[14]#print(GGA_g)gps_t = 1return 1elif choice == b'V':if ser.inWaiting():if ser.read(1) == b'T':if ser.inWaiting():if ser.read(1) == b'G':if gps_t == 1:VTG = ser.read(40)VTG_g = re.findall(r"\w+(?=,)|(?<=,)\w+", str(VTG))cogt = VTG_g[0]+'.'+VTG_g[1]+'T'if VTG_g[3] == 'M':cogm = '0.00'sog = VTG_g[4]+'.'+VTG_g[5]kph = VTG_g[7]+'.'+VTG_g[8]elif VTG_g[3] != 'M':cogm = VTG_g[3]+'.'+VTG_g[4]sog = VTG_g[6]+'.'+VTG_g[7]kph = VTG_g[9]+'.'+VTG_g[10]#print(kph)
def GPS_test():try:while True:if GPS_read():'''print("*********************")print('UTC Time:'+utctime)print('Latitude:'+lat+ulat)print('Longitude:'+lon+ulon)print('Number of satellites:'+numSv)print('Altitude:'+msl)print('True north heading:'+cogt+'°')print('Magnetic north heading:'+cogm+'°')print('Ground speed:'+sog+'Kn')print('Ground speed:'+kph+'Km/h')print("*********************")'''return(kph)except KeyboardInterrupt:ser.close()print("GPS serial Close!")if __name__ == "__main__":t1=time.time()for i in range(0,10):kph=GPS_test()print('Ground speed:'+kph+'Km/h')t2=time.time()print((t2-t1)/10)ser.close()
相关文章:
)
【Python】WHEELTEC GPS G60主代码读取传感器数据代码(Windows系统)
【Python】WHEELTEC惯导IMU主代码读取传感器数据代码 Windows系统,直接输入串口号即可 读取设备的移动速度(km/h) 注:该GPS传感器需要在室外条件运行,室内可能接收不到信号。 # coding: utf-8 # last modified:202310…...

【Vue】Vue2与Vue3的区别
目录 响应式系统组合式API更小的体积编译优化新的生命周期钩子更好的性能组件结构与模板TeleportFragments 静态节点标记异步组件Slots的改进更好的TypeScript支持Composition API的引入 响应式系统 Vue2使用Object.defineProperty来实现响应式系统,这意味着只有预…...

马斯克的 xAI 帝国!60亿融资背后的超级布局?
在全球科技竞技场,每个重大融资事件都是对行业格局的一次重塑。近日,埃隆马斯克的人工智能初创企业 xAI 成功完成了一轮规模空前的融资——60亿美元,此举无疑在业界投下了一枚震撼弹,标志着 AI 领域内一场新的竞赛拉开了序幕。 …...

互联网医院开发:引领智慧医疗新时代
随着科技的迅猛发展和互联网的普及,传统医疗模式正在迎来一场深刻的变革。互联网医院的崛起,打破了时间和空间的限制,为患者和医疗机构带来了更加便捷、高效、安全的医疗服务体验。本文将从技术角度深入探讨互联网医院的开发,包括…...

民国漫画杂志《时代漫画》第18期.PDF
时代漫画18.PDF: https://url03.ctfile.com/f/1779803-1248612707-27e56b?p9586 (访问密码: 9586) 《时代漫画》的杂志在1934年诞生了,截止1937年6月战争来临被迫停刊共发行了39期。 ps:资源来源网络!...

java.lang.NumberFormatException: For input string:
创建SpringBoot,Mybatis的项目时候,Service层调用Mapper层时候爆出了一个错误 发现报错是一个类型转换错误,经过排查后发现是因为mapper接收的实体类中没有写空参构造...
从零开始搭建Springboot项目脚手架4:保存操作日志
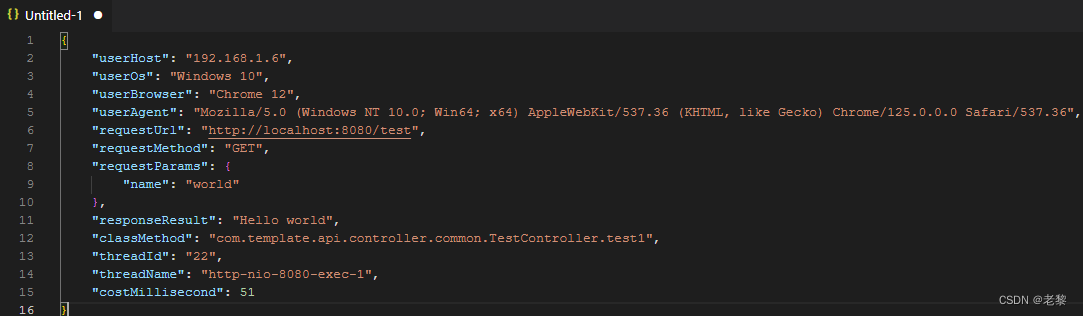
目的:通过AOP切面,统一记录接口的访问日志 1、加maven依赖 2、 增加日志类RequestLog 3、 配置AOP切面,把请求前的request、返回的response一起记录 package com.template.common.config;import cn.hutool.core.util.ArrayUtil; import cn.hu…...
)
持续总结中!2024年面试必问 20 道 Rocket MQ面试题(一)
一、请简述什么是RocketMQ? RocketMQ是一个开源的消息中间件,由阿里巴巴团队开发,主要设计用于分布式系统中的异步通信、应用解耦、流量削峰和消息持久化。它支持高吞吐量、高可用性、可扩展性和容错性,是构建大规模实时消息处理…...

生成式AI的GPU网络技术架构
生成式AI的GPU网络 引言:超大规模企业竞相部署拥有64K GPU的大型集群,以支撑各种生成式AI训练需求。尽管庞大Transformer模型与数据集需数千GPU,但实现GPU间任意非阻塞连接或显冗余。如何高效利用资源,成为业界关注焦点。 张量并…...

旅游卡在哪里拿货?千益畅行旅游卡源头
旅游卡是一种便捷的旅行工具,它可以提供多种优惠和特惠,让人们在旅行中更加省钱、省心。那么,在千益畅行旅游卡这里,我们该如何拿到这张神奇的旅游卡呢? 首先,千益畅行旅游卡作为一款专为旅行爱好者打造的…...

代码随想录算法训练营第四十一天| 509. 斐波那契数 、70. 爬楼梯 、746. 使用最小花费爬楼梯
509. 斐波那契数 题目链接:509. 斐波那契数 文档讲解:代码随想录/斐波那契数 视频讲解:视频讲解-斐波那契数 状态:已完成(1遍) 解题过程 看到题目的第一想法 虽然看了卡哥的动态规划五部曲,…...
Ribbon负载均衡(自己总结的)
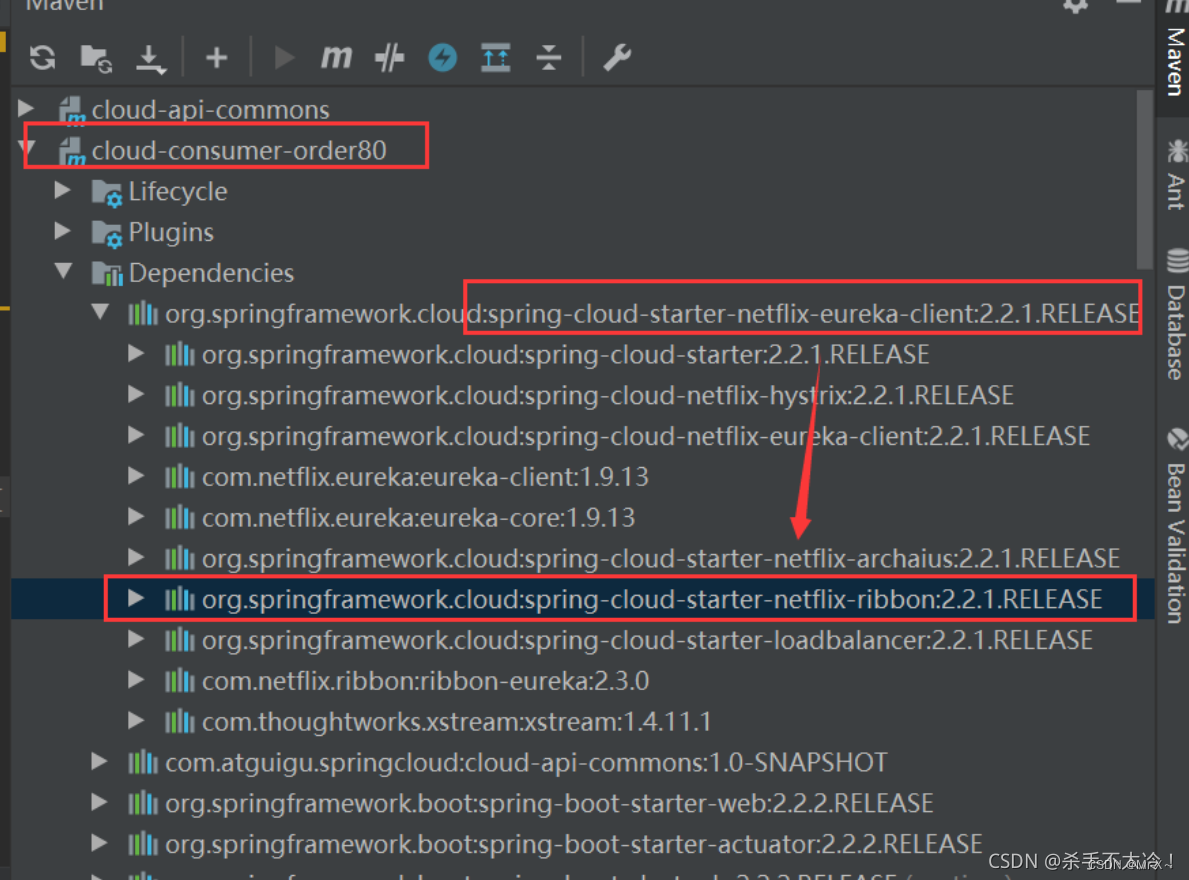
文章目录 Ribbon负载均衡负载均衡解决的问题不要把Ribbon负载均衡和Eureka-Server服务器集群搞混了Ribbon负载均衡代码怎么写ribbon负载均衡依赖是怎么引入的? Ribbon负载均衡 负载均衡解决的问题 首先Ribbon负载均衡配合Eureka注册中心一块使用。 在SpringCloud…...

Leetcode 力扣92. 反转链表 II (抖音号:708231408)
给你单链表的头指针 head 和两个整数 left 和 right ,其中 left < right 。请你反转从位置 left 到位置 right 的链表节点,返回 反转后的链表 。 示例 1: 输入:head [1,2,3,4,5], left 2, right 4 输出:[1,4,3,2…...

OSI七层模型和TCP/IP四层模型的区别
OSI七层模型 1.物理层(Physical Layer) 实现相邻节点之间比特流的透明传输,尽可能屏蔽传输介质带来的差异。典型设备:集线器(Hub)。 2.数据链路层(Data Link Layer) 将网络层传下来…...

在虚拟机上安装MySQL和Hive
在虚拟机上安装MySQL和Hive的步骤如下。这里将分别针对MySQL和Hive的安装进行说明。 MySQL安装步骤 1. 准备工作 下载MySQL安装包,选择与你虚拟机操作系统版本相匹配的MySQL版本,例如MySQL 8.0.35。 2. 卸载旧版本(如果已安装)…...

Vue 2 和 Vue 3 中同步和异步
Vue 2 和 Vue 3 中同步和异步 Vue 2 同步和异步 同步更新 (Synchronous Updates) Vue 2 在数据更新后会进行同步渲染更新,但为了性能优化,Vue 会在内部队列中异步地进行 DOM 更新。这意味着数据变化会立即被捕捉到,但实际的 DOM 更新会被推迟到下一个事件循环队列中。new V…...
ssm150旅游网站的设计与实现+jsp
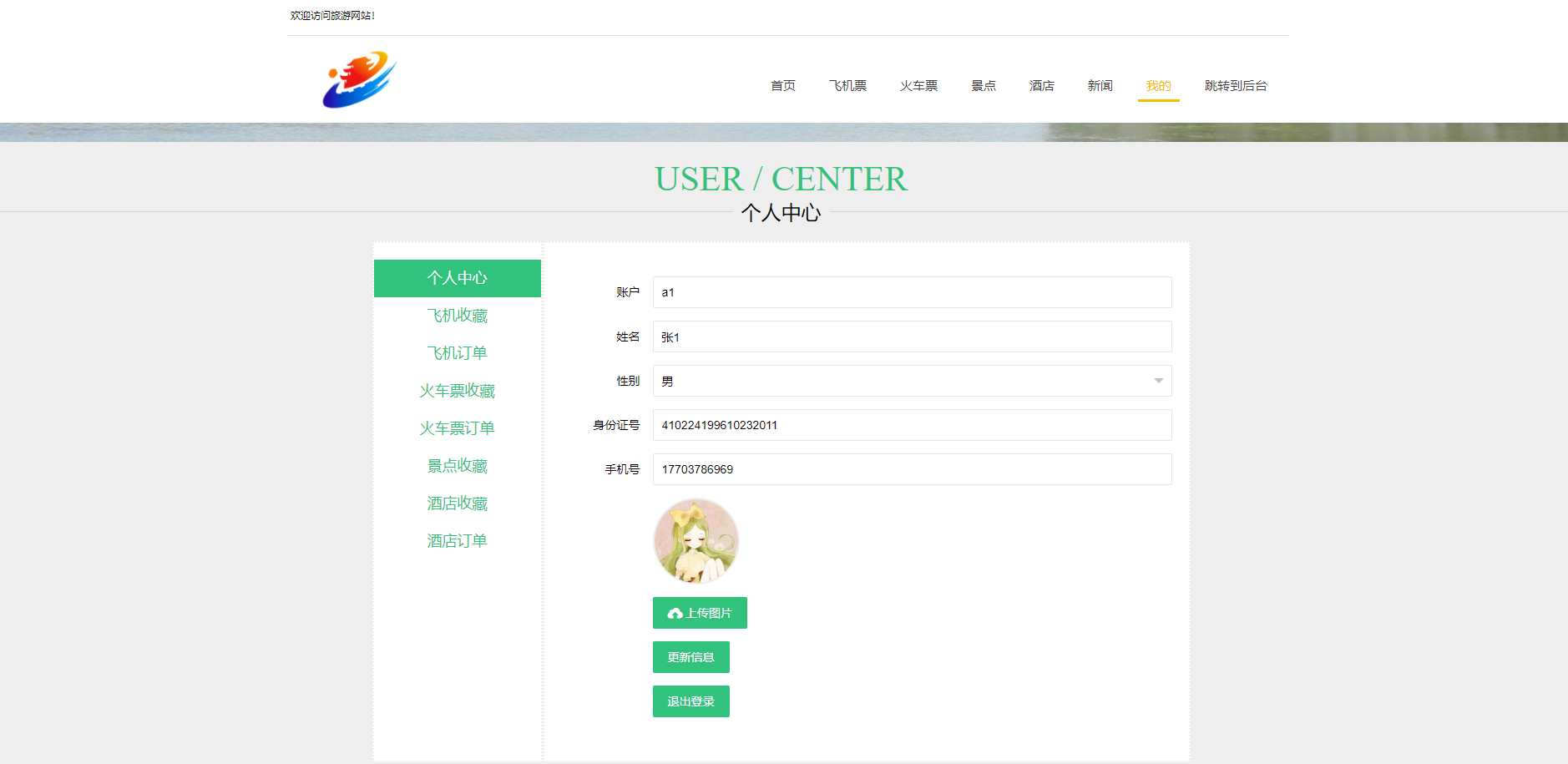
旅游网站设计与实现 摘 要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本旅游网站就是在这样的大环境下诞生,其可以帮助管理者在短时间内处理完毕庞…...
【加密与解密(第四版)】第十四章笔记
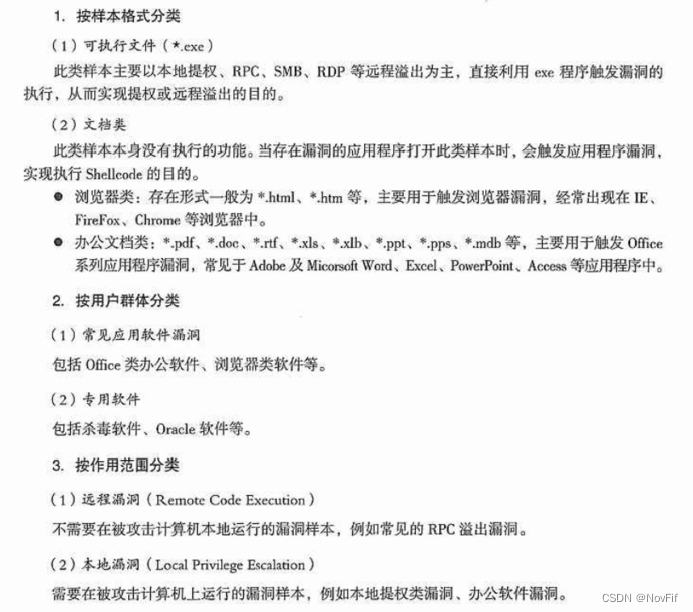
第十四章 漏洞分析技术 14.1 软件漏洞原理 缓冲区溢出漏洞:栈溢出 堆溢出、整型溢出(存储溢出、计算溢出、符号问题) UAF(Use-After-Free)漏洞 14.2 ShellCode 功能模块:下载执行、捆绑、反弹shell 14.3 …...
鸿蒙系统和安卓系统通过termux搭建Linux系统—Centos
目录 1. 前言 2. 效果图展示 3. 安装termux 4. 安装Centos系统 4.1 更换源 4.2 拉取镜像 4.3 启动centos 5.结尾 1. 前言 大家好,我是jiaoxingk 今天这篇文章让你能够在手机或者平板上使用Linux-Centos系统 让你随时随地都能操作命令行进行装13 2. 效果图展示…...
数据结构的希尔排序(c语言版)
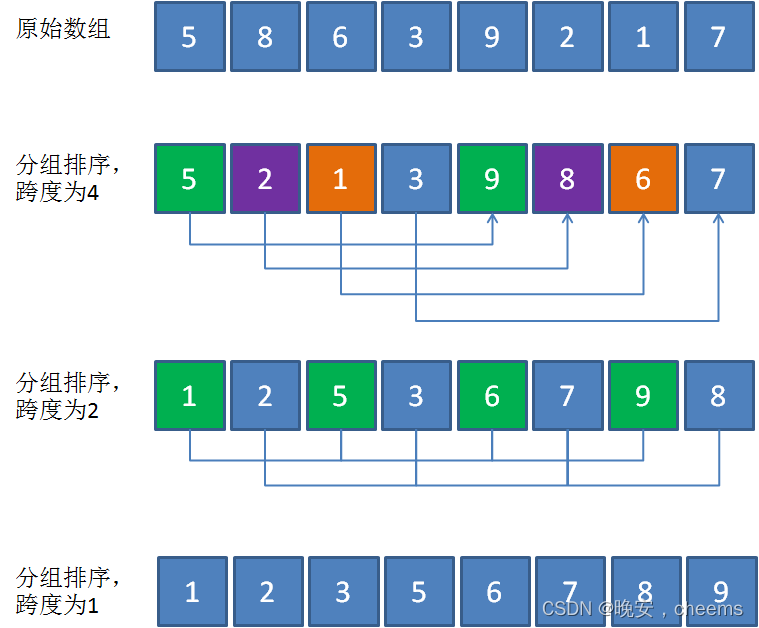
一.希尔排序的概念 1.希尔排序的基本思想 希尔排序是一种基于插入排序算法的优化排序方法。它的基本思想如下: 选择一个增量序列 t1,t2,......,tk,其中 ti > tj, 当 i < j,并且 tk 1。 按增量序列个数k&#…...

[STM32U3] 【STM32U385RG 测评】02+调试串口1输出字符串
一::STM32U385 串口知识分享 通用同步/异步收发器(USART) 这些设备有两个嵌入式通用同步接收器发送器(USART1和USART3)以及两个通用异步接收器发送器(UART4和UART5) 该USART提供了一个灵活的手段来执行全双工数据交换与外部设备需要一个行业标准的NRZ异步串行数据格…...

OpenVAS部署避坑指南:从Kali的`apt-get install gvm`到官方OVA镜像,我踩过的那些雷
OpenVAS部署避坑指南:从Kali的apt-get install gvm到官方OVA镜像实战复盘 1. 为什么OpenVAS部署总让人头疼? 三年前我第一次接触漏洞扫描工具时,OpenVAS的安装过程就给我留下了深刻印象。当时按照某技术论坛的教程,在Kali Linux…...
)
实战:如何用OpenPCDet训练你自己的“树”检测模型(附完整数据集与配置文件)
实战:如何用OpenPCDet训练你自己的“树”检测模型(附完整数据集与配置文件) 激光雷达在林业资源调查中的应用正在快速普及。想象一下,你手持激光扫描设备走进一片森林,几分钟内就能获取每棵树的精确三维坐标和形态数据…...

别再死记硬背ELMo、GPT、BERT的区别了!一张图带你搞懂它们的核心差异与适用场景
一图胜千言:ELMo、GPT、BERT技术差异与实战选型指南 刚接触NLP时,我也曾被各种预训练模型绕得头晕眼花——它们看起来都能处理文本,但面试官一问"为什么用BERT不用GPT"就瞬间语塞。直到我把这些模型拆解成汽车零件,才真…...

VSCode Mermaid Preview:面向技术团队的实时图表协作解决方案
VSCode Mermaid Preview:面向技术团队的实时图表协作解决方案 【免费下载链接】vscode-mermaid-preview Previews Mermaid diagrams 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-mermaid-preview 在技术文档编写、系统架构设计和项目规划过程中&…...

如何判断杉木桩品牌的选型标准?
开篇即明:本文仅输出选型方法,不推荐任何具体产品。杉木桩作为园林、水利、建筑等领域的常用材料,其质量直接关系工程安全与寿命。从业十余年,我始终认为:选型需回归标准,而非品牌名称。以下从四个核心维度…...

多版面文章活动公众号管理系统
文章营销活动系统概述基于微擎系统开发的在线交付文章营销推广类源码应用,支持多活动管理、多站点搭建及多版面切换。核心功能包括转发奖励积分或余额,适配文章推广、流量裂变及营销获客需求。核心功能多活动管理 后台可创建并管理多个营销活动ÿ…...

从伯德图到阶跃响应:手把手教你用Matlab分析控制系统该不该校正
从伯德图到阶跃响应:手把手教你用Matlab分析控制系统该不该校正 控制系统就像一台精密的仪器,而伯德图、根轨迹和阶跃响应则是它的"体检报告"。当你拿到一个系统模型时,如何像医生解读化验单一样,准确判断它是否需要&qu…...

日语语音识别终极指南:5个技巧让Faster-Whisper-GUI准确率提升300%
日语语音识别终极指南:5个技巧让Faster-Whisper-GUI准确率提升300% 【免费下载链接】faster-whisper-GUI faster_whisper GUI with PySide6 项目地址: https://gitcode.com/gh_mirrors/fa/faster-whisper-GUI 想要在本地高效处理日语音频转写和字幕生成吗&am…...

告别环境配置烦恼:手把手教你搞定Qualcomm AI Engine Direct在Windows和Linux下的开发环境
高通AI引擎开发环境全攻略:Windows与Linux双平台实战指南 第一次打开Qualcomm AI Engine Direct SDK的压缩包时,你可能会有种面对乐高零件箱的错觉——各种架构的库文件、不同平台的工具链、错综复杂的依赖关系扑面而来。作为曾在多个芯片平台迁移AI模型…...