【光伏干货】光伏无人机巡检步骤
随着光伏产业的迅速发展和无人机技术的日益成熟,光伏无人机巡检已成为提高光伏电站运维效率、降低运维成本的重要手段。本文将详细介绍光伏无人机巡检的步骤,帮助读者更好地理解和应用这一技术。
一、前期准备
1、设备检查:对无人机及其相关设备(如摄像头、传感器、电池等)进行全面检查,确保其处于良好的工作状态。
2、场地勘察:对光伏电站进行实地勘察,了解电站布局、组件类型、地形地貌等信息,为后续的飞行规划提供依据。
3、飞行计划制定:根据电站实际情况,制定详细的飞行计划,包括飞行路线、巡检点、飞行高度、速度等参数。
二、无人机起飞与巡检
1、无人机起飞:在合适的地点进行无人机起飞,确保起飞过程中无人机稳定、安全。
2、巡检过程:按照飞行计划进行巡检,无人机搭载的高清摄像头和传感器可以实时采集光伏组件的图像和数据。巡检过程中,无人机可以根据预设的巡检点进行自动飞行和拍摄,也可以进行手动操作以适应复杂地形和特殊情况。
3、数据传输与处理:无人机采集的图像和数据可以通过无线传输方式实时传输到地面站,地面站可以对数据进行实时处理和分析,及时发现并处理潜在问题。
三、数据分析与报告生成
1、数据处理:对无人机采集的图像和数据进行处理和分析,提取关键信息,如组件缺陷、阴影遮挡、热斑等。
2、报告生成:根据数据处理结果,生成详细的巡检报告,报告应包含巡检时间、巡检区域、发现问题及建议等信息。
3、问题反馈与处理:将巡检报告及时反馈给光伏电站运维人员,运维人员根据报告中的建议进行相应的处理和维修工作。
四、后期总结与优化
1、总结经验:对本次巡检过程进行总结和评估,分析巡检效果、存在的问题和改进空间。
2、优化方案:根据总结经验,对巡检方案进行优化和改进,提高巡检效率和准确性。
3、持续改进:定期对无人机巡检技术进行更新和升级,以适应光伏产业的不断发展和变化。
总之,光伏无人机巡检是一种高效、便捷的光伏电站运维手段。通过合理的前期准备、精心的飞行计划制定、严格的巡检过程控制以及科学的数据分析和处理,可以实现对光伏电站的全面、准确、及时的巡检和监控,为光伏电站的安全稳定运行提供有力保障。
相关文章:
【光伏干货】光伏无人机巡检步骤
随着光伏产业的迅速发展和无人机技术的日益成熟,光伏无人机巡检已成为提高光伏电站运维效率、降低运维成本的重要手段。本文将详细介绍光伏无人机巡检的步骤,帮助读者更好地理解和应用这一技术。 一、前期准备 1、设备检查:对无人机及其相关…...

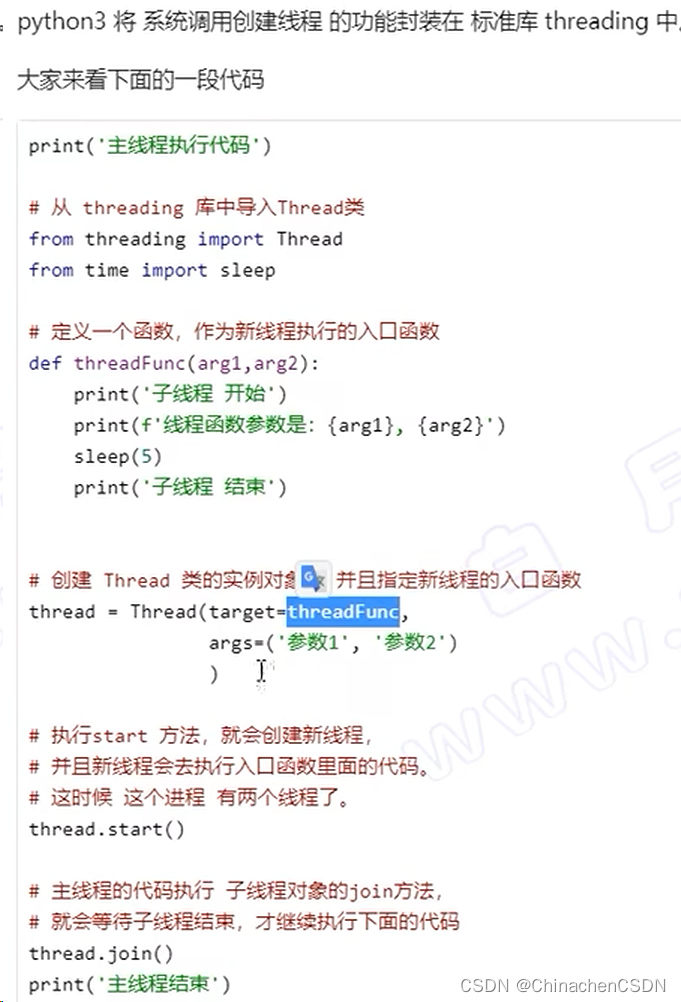
『大模型笔记』从头开始代码构建GPT!
从头开始代码构建GPT! 文章目录 一. 从头开始代码构建GPT!二. 参考文献一. 从头开始代码构建GPT! 我们构建了一个生成式预训练Transformer (GPT),遵循论文《Attention is All You Need》和OpenAI的GPT-2 / GPT-3的方法。我们讨论了与ChatGPT的联系,ChatGPT已经风靡全球。我…...
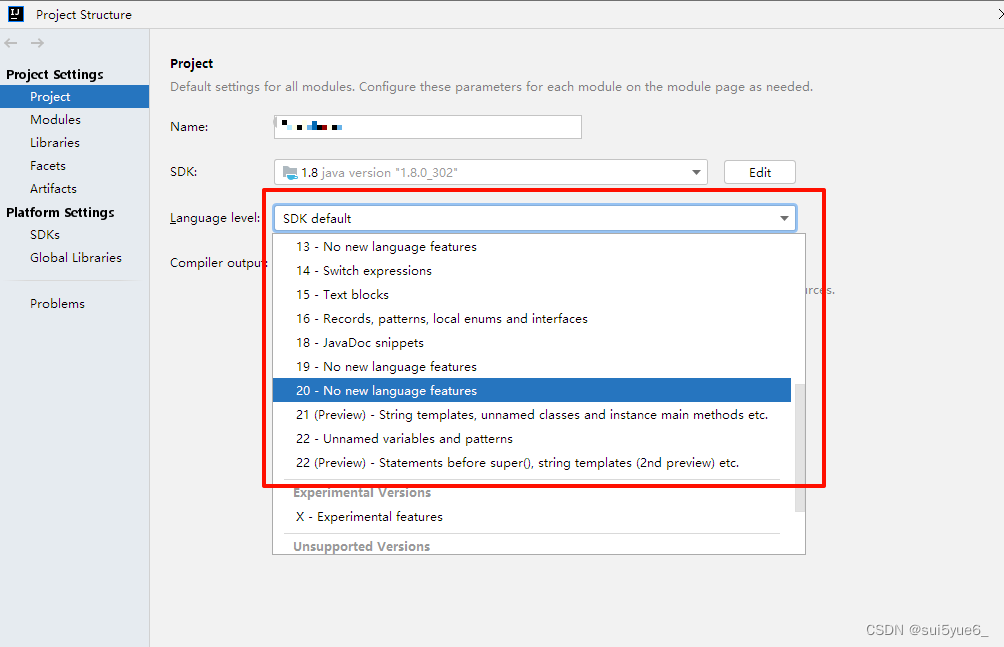
idea的project structure下project [lauguage ]()level 没有java的sdk17选项如何导入
idea的project structure下project lauguage level 没有java的sdk17选项如何导入 别导入了,需要升级idea版本。idea中没有project language level没有17如何添加 - CSDN文库 别听这文章瞎扯淡 2021版本就是没有,直接卸载升级到最新版本就可以了。没办法…...

JavaScript数据类型与转换
JavaScript是一种弱类型语言,在定义变量的时候不用规定数据的类型,但这部表示JavaScript没有规定数据类型。 数值 JavaScript中数值类型不区分浮点数与整数,所有的数值都以浮点型来表示。另外JavaScript核心,Math还提供了大量的…...
三十、openlayers官网示例解析Double click, Drag and Zoom——第二次点击鼠标拖拽缩放地图效果、取消地图双击放大事件
这篇展示了如何在地图上添加第二次按下鼠标移动鼠标实现拖拽缩放地图效果。 官网demo地址: Double click, Drag and Zoom 官网介绍文字的翻译如下: 示例比较简单,直接贴代码: const map new Map({//添加第二次点击拖拽缩放地图i…...

前端基础入门三大核心之网络安全篇:TLS/SSL的魔法之旅
前端基础入门三大核心之网络安全篇:TLS/SSL的魔法之旅 TLS/SSL:数据安全的守护神工作原理:四步走,安全到家1. 握手,你好吗?代码示例(伪代码):客户端发起握手请求 2. 身份…...

Flutter 中的 SnackBarAction 小部件:全面指南
Flutter 中的 SnackBarAction 小部件:全面指南 在 Flutter 中,SnackBar 是一种流行的用于提供轻量级反馈的方式,它可以在屏幕上短暂显示消息。SnackBarAction 则是与 SnackBar 结合使用的一种按钮组件,允许用户对显示的消息做出响…...

Point-Nerf 理论笔记和理解
文章目录 什么是point nerf 和Nerf 有什么区别Point Nerf 核心结构有哪些?什么是point-based radiance field? 点云位置以及置信度是怎么来Point pruning 和 Point Growing 什么是point nerf 和Nerf 有什么区别 基本的nerf 是通过过拟合MLP来完成任意视角场景的重…...

深度学习中的梯度消失和梯度爆炸问题
在深度学习领域,随着模型层数的增加,我们常常会遇到两个棘手的问题:梯度消失(Vanishing Gradients)和梯度爆炸(Exploding Gradients)。这两个问题严重影响了深度神经网络的训练效率和性能。本文…...
Flink 通过 paimon 关联维表,内存降为原来的1/4
你好,我是 shengjk1,多年大厂经验,努力构建 通俗易懂的、好玩的编程语言教程。 欢迎关注!你会有如下收益: 了解大厂经验拥有和大厂相匹配的技术等 希望看什么,评论或者私信告诉我! 文章目录 一…...
Python知识详解【1】~{正则表达式}
正则表达式是一种用于匹配字符串模式的文本工具,它由一系列普通字符和特殊字符组成,可以非常灵活地描述和处理字符串。以下是正则表达式的一些基本组成部分及其功能: 普通字符:大多数字母和数字在正则表达式中表示它们自己。例如…...
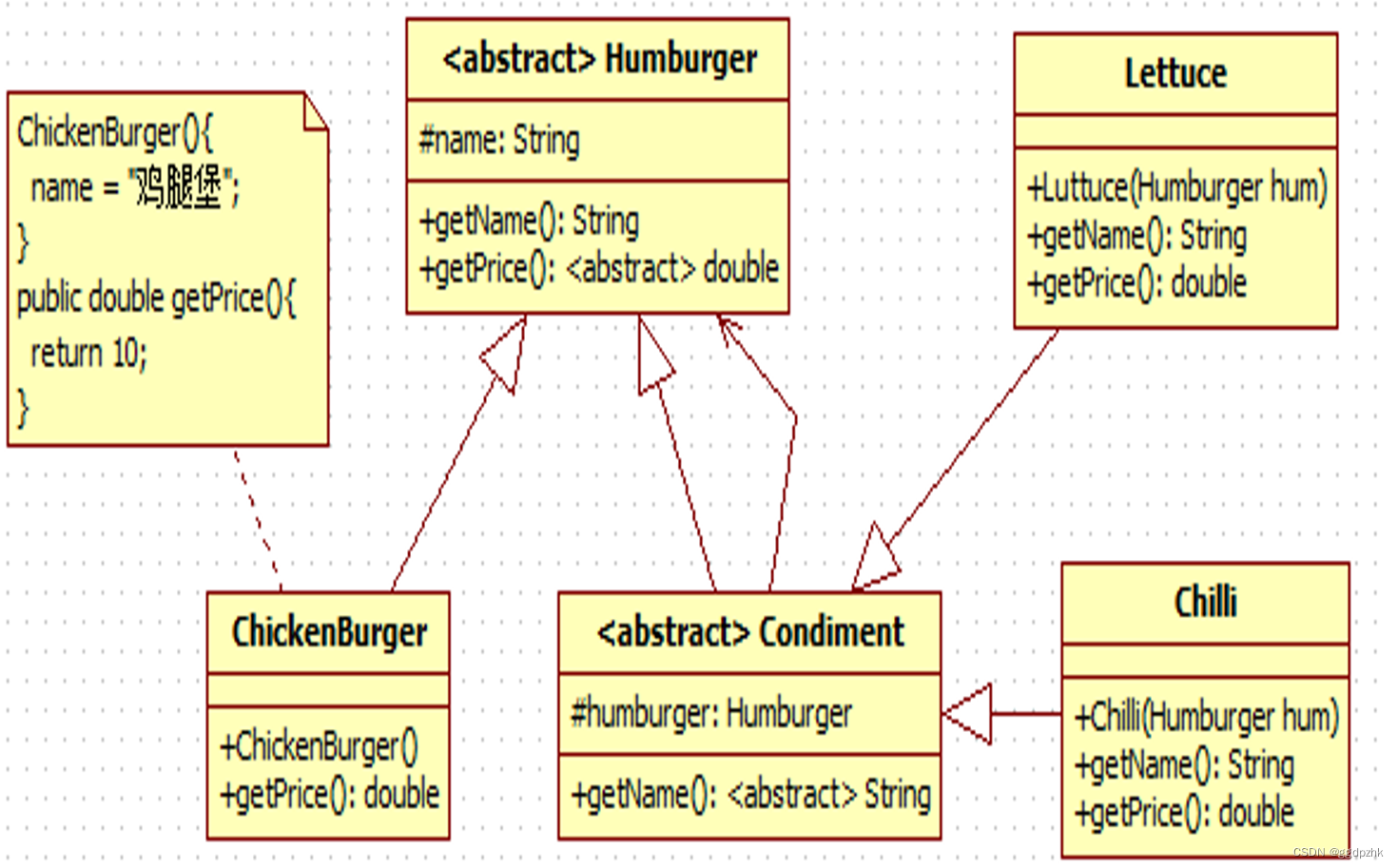
装饰模式:鸡腿堡
文章目录 UML类图目录结构Humburger.javaChickenBurger.javaCondiment.javaChuilli.javaLettuce.javaTest.java深度理解test怎么写 UML类图 目录结构 我们从指向最多的开始写 Humburger.java package zsms;public abstract class Humburger {protected String name;public S…...
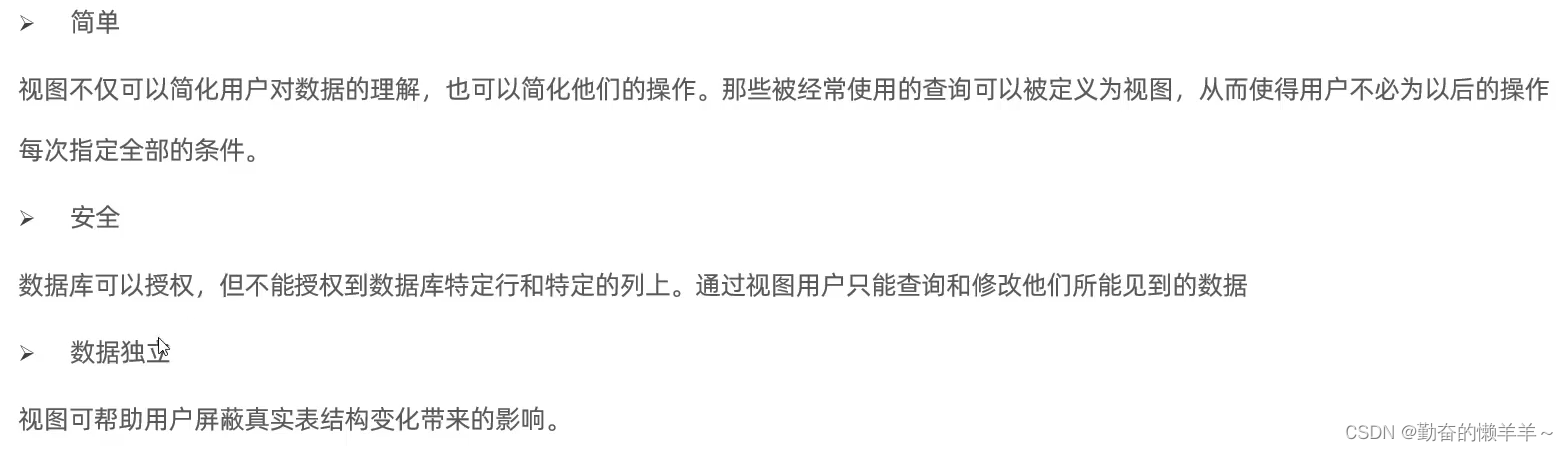
视图【mysql数据库】
目录 一、视图的创建、查看、修改、删除 二、cascaded、local检查选项 cascaded和local的区别 三、视图的更新 四、视图的作用 一、视图的创建、查看、修改、删除 二、cascaded、local检查选项 上面的几句SQL中,我们虽然给视图插入了id 30的数据,但…...
函数)
opencv的findContours()函数
来自WaTab AI Pro 请详细解释cv2.findContours(): cv2.findContours() 是 OpenCV 中用于检测图像轮廓的函数。轮廓可以看作是将连续的点(沿边界)连接在一起的一条曲线,具有相同的颜色或强度。该函数常用于图像处理和计算机视觉中…...
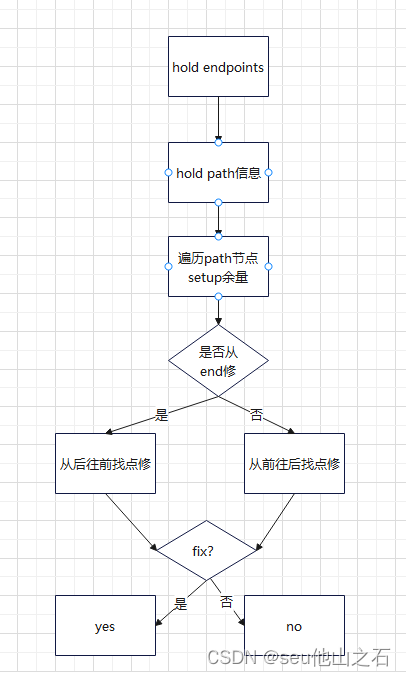
多电压档hold扫尾
MMMC下STA收敛更为困难,setup通过DMSA可以很好的得到收敛;但是常规的时序修复工具很难通过工具得到最终clean的时序状态,本文介绍一种多模多角下hold的收敛方法。 该方法主要通过遍历hold路径上多电压setup的余量,支持从前往后和从…...
ABAP Json解析案例
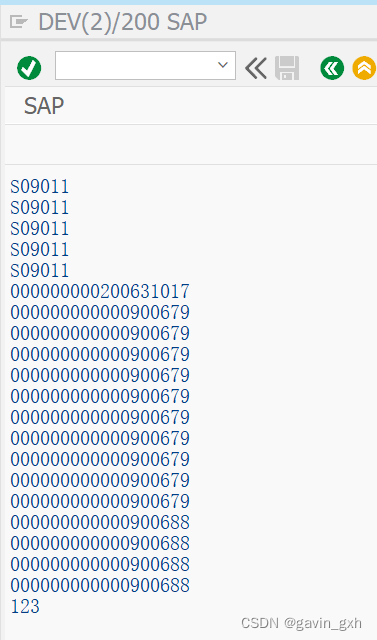
ABAP解析返回的JSON 案例 DATA:LTOKEN TYPE STRING.DATA: LL_LINES(10),"行数LL_TABIX(10),"循环标号LL_PECNT TYPE P LENGTH 6 DECIMALS 2, "百分比LL_PECET(6),"百分数LL_TEXT(40)."消息CLEAR: LL_LINES,LL_TABIX,LL_PECNT,LL_PECET,LL_TEXT.* …...
QT学习(20):QStyle和自定义样式
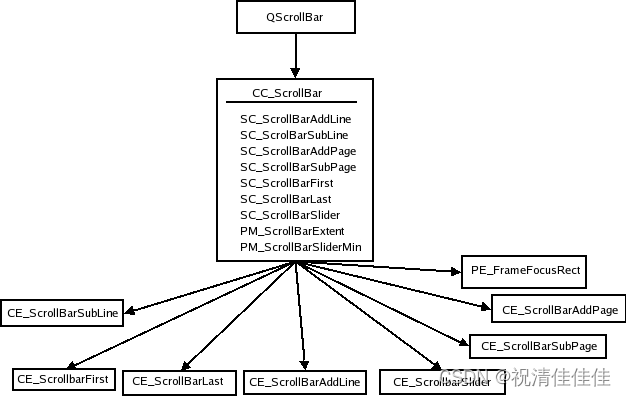
QStyle 样式(继承自QStyle类)代表控件的绘制并封装GUI的外观。QStyle是一个封装了GUI外观的抽象基类。Qt使用QStyle去执行几乎所有的内置控件的绘制,确保控件外观和原生控件风格风格相同。 class Q_WIDGETS_EXPORT QStyle : public QObject{…...

香橙派 AIpro 昇腾 Ascend C++ 分类模型适配
香橙派 AIpro 昇腾 Ascend C 分类模型适配 flyfish 文章目录 香橙派 AIpro 昇腾 Ascend C 分类模型适配前言一、PyTorch官网resnet模型处理方式1、PyTorch模型 导出 onnx格式2、完整测试 输出top1结果3、完整测试 输出top5结果 二、YOLOv8官网resnet模型Python处理方式三、昇腾…...
2024吉林省电赛(达盛杯)
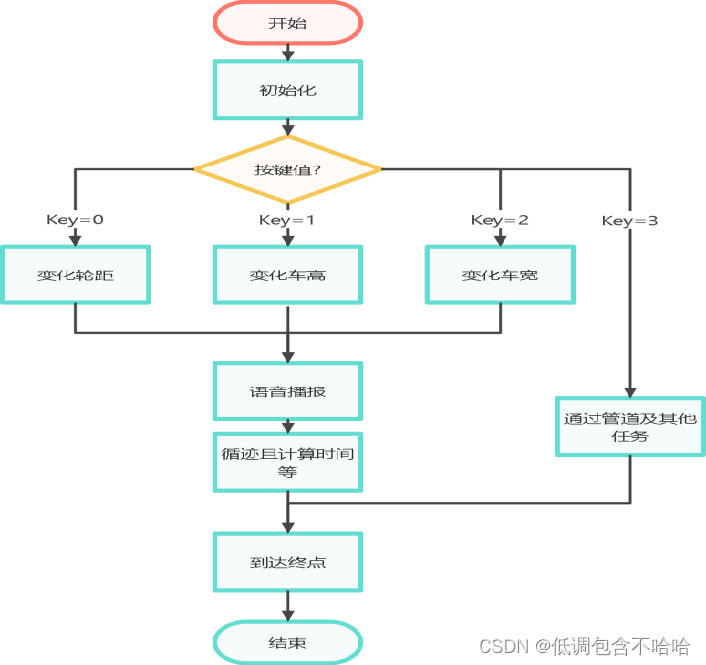
1. 电赛F4系统板3D图 提起自制STM32F407VET6系统板 2. 电赛原理图 3. 电赛PCB图 4. 智能车实物图 下图是电赛的实物图,结构采用3D打印 5. 软件设计 下图是程序设计图 6. 仿真视频 (1) 变化高度 2024吉林省电赛仿真1 (2) 变化轮距 2024电赛仿真2 7. APP控制小车 …...
【算法题】520 钻石争霸赛 2024 全解析
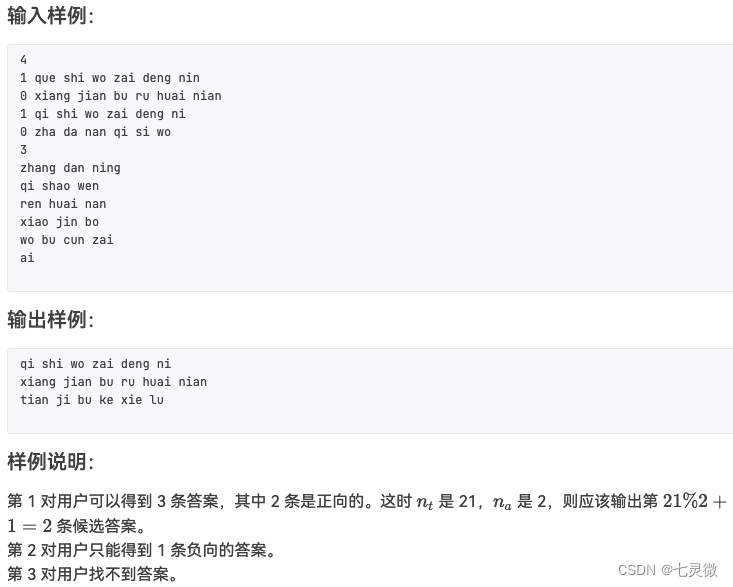
都是自己写的代码,发现自己的问题是做题速度还是不够快 520-1 爱之恒久远 在 520 这个特殊的日子里,请你直接在屏幕上输出:Forever and always。 输入格式: 本题没有输入。 输出格式: 在一行中输出 Forever and always…...
了!用Celery的Canvas原语(Group/Chain/Chord)构建复杂异步工作流)
别再只会用delay()了!用Celery的Canvas原语(Group/Chain/Chord)构建复杂异步工作流
别再只会用delay()了!用Celery的Canvas原语构建复杂异步工作流 在异步任务处理领域,Celery早已成为Python生态中的标配工具。但令人惊讶的是,大多数开发者仅仅停留在task.delay()的基础用法上,就像只学会了加减法却从未接触过微积…...

告别虚拟机卡顿:在Ubuntu 18.04上为ARM板交叉编译Qt5.12.9的完整配置流程
突破虚拟机性能瓶颈:Ubuntu 18.04下高效交叉编译Qt5.12.9的工程实践 当你在40GB磁盘空间的Ubuntu虚拟机上尝试编译Qt5.12.9时,解压后的2.8GB源码目录和漫长的编译等待时间可能已经让你抓狂。这不是个例——嵌入式开发工程师经常面临这样的困境࿱…...

别只盯着波特率!深入理解英飞凌MCMCAN的报文过滤与优先级处理机制
别只盯着波特率!深入理解英飞凌MCMCAN的报文过滤与优先级处理机制 在嵌入式系统开发中,CAN总线通信的稳定性和效率往往决定了整个系统的性能表现。许多工程师在配置CAN模块时,常常将注意力集中在波特率设置等基础参数上,却忽略了报…...

Sora之后的真相:2026年真正落地的8款工业级AI视频引擎,含API吞吐量、帧间PSNR均值与商用SLA承诺明细
更多请点击: https://intelliparadigm.com 第一章:Sora之后的真相:2026年真正落地的8款工业级AI视频引擎,含API吞吐量、帧间PSNR均值与商用SLA承诺明细 Sora发布两年后,工业界已摒弃“演示即产品”的幻觉。截至2026年…...

Avidemux:开源视频剪辑神器,5分钟学会专业级视频处理
Avidemux:开源视频剪辑神器,5分钟学会专业级视频处理 【免费下载链接】avidemux2 Avidemux2, simple video editor 项目地址: https://gitcode.com/gh_mirrors/avi/avidemux2 你知道吗?在开源视频编辑领域,有一款轻量级但功…...

5分钟掌握Pearcleaner:macOS深度清理的终极免费方案
5分钟掌握Pearcleaner:macOS深度清理的终极免费方案 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 您是否曾为macOS上卸载应用后残留的配置文件…...
)
ESP8266透传总失败?手把手教你用Arduino IDE和串口助手搞定Blinker配网(避坑大全)
ESP8266透传配置终极指南:从AT指令到Blinker配网全解析 物联网开发者们,是否曾被ESP8266模块的透传配置折磨得焦头烂额?当你在深夜调试AT指令却只收到一堆乱码时,那种挫败感我深有体会。本文将带你彻底攻克这个物联网入门的第一道…...

如何用WeChatExporter轻松备份和恢复微信聊天记录:Mac用户终极指南
如何用WeChatExporter轻松备份和恢复微信聊天记录:Mac用户终极指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因误删重要微信聊天记录而懊恼不已…...

抖音批量下载开源工具:3个核心模块打造高效无水印下载工作流
抖音批量下载开源工具:3个核心模块打造高效无水印下载工作流 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback…...

如何用3步将B站视频变成文字稿?这个智能转录工具让你告别手动记录
如何用3步将B站视频变成文字稿?这个智能转录工具让你告别手动记录 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 你是否曾经为了记录一个B站视频…...